Изобретение относится к индукционному нагреву, в частности к устройствам для плавки и удержания металлов и сплавов во взвешенном состоянии в условиях невесомости.
Известно устройство для плавки металлов и сплавов во взвешенном состоянии, содержащее корпус и индукторы, образованные витками проводки с протекающими по ним токами высокой частоты (ВЧ - диапазон 3•104...3•106 Гц), наводящими в поверхностном слое образца токи Фуко. Взаимодействие токов Фуко с магнитным полем проводников обеспечивает левитацию, то есть взаимное отталкивание магнитных полей индуктора и поля, наводимого токами Фуко, что создает эффект парения твердого образца или расплавленной капли в пространстве, ограниченном индуктором. В итоге твердый образец или капля расплавленного металла находятся в точке, где напряженность магнитного поля является наименьшей (потенциальная яма). (Монография Глебовского В.Г. и Бурцева В.Т. "Плавка металлов и сплавов во взвешенном состоянии". М.: Металлургия. 1974. -174 с.)
Наиболее близким к предлагаемому изобретению является устройство для плавки металлов и сплавов во взвешенном состоянии по авт.св. N 1117865 кл. H 05 B 6/32, 1983г., содержащее корпус с расположенными на нем индукторами для нагрева образца, через которые проходит ток высокой частоты.
Недостатком известного устройства является отсутствие возможности плавки образца в условиях невесомости (для космических условий) из-за отсутствия защиты от возмущающих систему гравитационных воздействий.
Задачей изобретения является расширение технологических возможностей плавки со свободным парением твердого образца или капли расплава в невесомости (в условиях космоса).
Это достигается тем, что в устройстве для плавки металлов и сплавов во взвешенном состоянии, содержащем корпус с расположенными на нем индукторами для нагрева образца, через которые проходит ток высокой частоты, корпус выполнен в виде правильного многогранника, по граням которого расположены индукторы, выполненные торообразными или в виде многовитковых катушек, а образец расположен в геометрическом центре этого многогранника, при этом центр окружности средней плоскости кольца тора совпадает с центральной точкой грани, а ось многовитковой катушки проходит через центральную точку грани перпендикулярно ей, причем устройство снабжено системой управления токами высокой частоты в индукторах и содержит индуктивные датчики относительного перемещения, измерительные катушки которых расположены в вершинах многогранника, акселерометры, расположенные на гранях корпуса, усилители мощности токов высокой частоты и регулятор в виде управляющей ЭВМ; причем сигналы от индуктивных датчиков и акселерометров поступают в управляющую ЭВМ, где формируется многомерный закон управления таким образом, чтобы изменение положения потенциальной ямы напряженности в высокочастотном магнитном поле обеспечивало снижение микрогравитационных ускорений на образце по сравнению с ускорениями, возникшими на корпусе устройства и фиксируемых акселерометрами.
На фиг.1 показана конструктивная схема устройства на примере выполнения корпуса в виде куба, на фиг. 2 - варианты выполнения корпуса индуктора в виде платоновых тел с таблицей, содержащей их названия и число граней, на фиг. 3 - структурная схема управления для ЭВМ.
Устройство для плавки металлов и сплавов во взвешенном состоянии состоит из технологических катушек-индукторов 1, 2, 3, 4, 5, 6, питаемых токами высокой частоты (3•104...3•106 Гц), измерительных катушек 7, 8, 9, 10, 11, 12, 13, 14, питаемых токами частотой 3•109...10•109 Гц (индуктивных датчиков), расположенных по осям, соединяющим центр образца с вершинами многогранника, причем технологические катушки смонтированы на гранях корпуса 15, выполненного, например, в виде куба, причем индукторы расположены так, чтобы центральная точка грани была центром окружности средней плоскости кольца-тора индуктора, а для варианта многовитковых индукторов ось, проходящая через центральную точку грани перпендикулярно ей, была бы осью многовитковой катушки индуктора. Индуктивные датчики измеряют положение образца (капли расплавленного металла) относительно граней-стенок корпуса 15, причем несущая частота работы датчиков составляет 3...5 КГц. На гранях корпуса 15 установлены измерительные акселерометры 16, 17, 18, 19, 20, 21, измеряющие микрогравитационные ускорения по шести направлениям: по два датчика на каждые три взаимно перпендикулярные направления, причем каждый датчик пары одного направления установлен на противоположной грани-стенки, перпендикулярной этому направлению. При вышеуказанных возможных конфигурациях расположения индукторов 1. . .6 и организации магнитного поля расплавленный образец 22 примет форму шара, причем, чем больше будет задействовано граней и соответственно индукторов, тем ближе будет расплав к форме шара и тем устойчивее будет левитация.
Устройство работает следующим образом.
Токи высокой частоты (ВЧ), проходя через технологические катушки-индукторы 1. . 6, создают магнитное поле. Наименьший потенциал (потенциальная яма) находится в центре системы. Они наводят в образце токи Фуко, вызывая плавление образца. При отсутствии земной гравитации в невесомости целесообразно создание магнитного поля для технологических целей с центральной симметрией, по возможности однородного по любому направлению в трехмерном пространстве. В невесомости образец принимает форму шара, причем условия вакуума способствуют оптимальному выделению из расплава примесей. Взаимодействием первичного и наведенного в образце 22 магнитных полей обеспечивается устойчивое положение шара в центре магнитной системы, в результате чего шар удерживается в "потенциальной яме" магнитного поля. Возмущения, действующие на шар, парируются силами "квазиупругости", которые образует магнитное поле. Энергетические затраты в невесомости из-за отсутствия необходимости осуществлять левитацию меньше, чем в земных условиях.
Система защиты от микрогравитации работает следующим образом. При воздействии на образец 22, находящийся в корпусе 15, внешних пространственных микрогравитационных ускорений, они фиксируются акселерометрами 16...21. Сигналы акселерометров усиливаются и поступают в регулятор (управляющую ЭВМ). Кроме того, происходит измерение индуктивными датчиками 7...14 относительного положения образца 22 (в виде капли расплава или шара).
Сигналы от акселерометров и индуктивных датчиков обрабатываются в управляющей ЭВМ для определения мгновенных значений векторов внешнего ускорения и относительного положения шара. Для законов управления, формируемых на основе результатов, полученных в работе Синева А.В., Рыбак Л.А., Пашкова А.И. "Синтез активных систем виброизоляции на космических объектах". М. Янус-К, 1997. -160 с. , токи в индукторах изменяются таким образом, чтобы изменить положение точки "потенциальной ямы" магнитного поля и в результате свести к минимуму микрогравитационные ускорения на образце 22. Это достигается изменением напряжений на входе катушек индукторов, закон управления которыми также рассчитывается управляющей ЭВМ. В итоге создается многомерный закон управления системой защиты от микрогравитации, который формируется из условий компромисса между возможностями снижения микрогравитационных ускорений при сохранении относительного положения образца 22, исходя из общих принципов решения этой задачи, сформулированных в упомянутой выше работе.
Заявка подготовлена при финансовой поддержке Российского Фонда Фундаментальных Исследований; проект N 97-01-00358.
| название | год | авторы | номер документа |
|---|---|---|---|
| ДВИГАТЕЛЬ С ВНЕШНИМ ПОДВОДОМ ТЕПЛОТЫ | 2001 |
|
RU2200863C2 |
| ПРОСТРАНСТВЕННЫЙ АКСЕЛЕРОМЕТР С ЭЛЕКТРОМАГНИТНЫМ ПОДВЕСОМ | 1997 |
|
RU2138823C1 |
| УСТРОЙСТВО ДЛЯ ОБРАБОТКИ ТОПЛИВА | 2000 |
|
RU2190118C2 |
| Индукционное устройство для нагрева плоских металлических заготовок в состоянии левитации | 2022 |
|
RU2790366C1 |
| ПРЕОБРАЗОВАТЕЛЬ ЛИНЕЙНЫХ ПЕРЕМЕЩЕНИЙ | 1993 |
|
RU2073827C1 |
| Устройство для измерения ускорения | 1990 |
|
SU1760461A1 |
| СПОСОБ ПОДАВЛЕНИЯ ПОМЕХ ОТ КОЛЕБАНИЙ УПРУГОЙ КОНСТРУКЦИИ КОСМИЧЕСКОЙ ТРАНСФОРМИРУЕМОЙ АНТЕННЫ В ПРОЦЕССЕ ЭКСПЛУАТАЦИИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1999 |
|
RU2161109C1 |
| УСТРОЙСТВО ДЛЯ ПЛАВЛЕНИЯ И КРИСТАЛЛИЗАЦИИ МАТЕРИАЛОВ | 2001 |
|
RU2191228C1 |
| Установка для локального высокочастотногоНАгРЕВА дЕТАлЕй из пРОВОдящиХ МАТЕРиАлОВ | 1979 |
|
SU836822A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ВЕЛИЧИНЫ И ФАЗЫ ДИСБАЛАНСА | 2002 |
|
RU2237878C2 |


Изобретение относится к области металлургии (индукционный нагрев), в частности к устройствам для плавки и удержания металлов и сплавов во взвешенном состоянии в условиях невесомости. Устройство содержит корпус с расположенными на нем индукторами для нагрева образца, через которые проходит ток высокой частоты. Корпус выполнен в виде правильного многогранника, по граням которого расположены индукторы, выполненные торообразными или в виде многовитковых катушек, а образец расположен в геометрическом центре этого многогранника, при этом центр окружности средней плоскости кольца тора совпадает с центральной точкой грани, а ось многовитковой катушки проходит через центральную точку грани перпендикулярно ей. Изобретение расширяет технологические возможности плавки со свободным парением твердого образца или капли расплава в условиях космоса. 3 ил., 1 табл.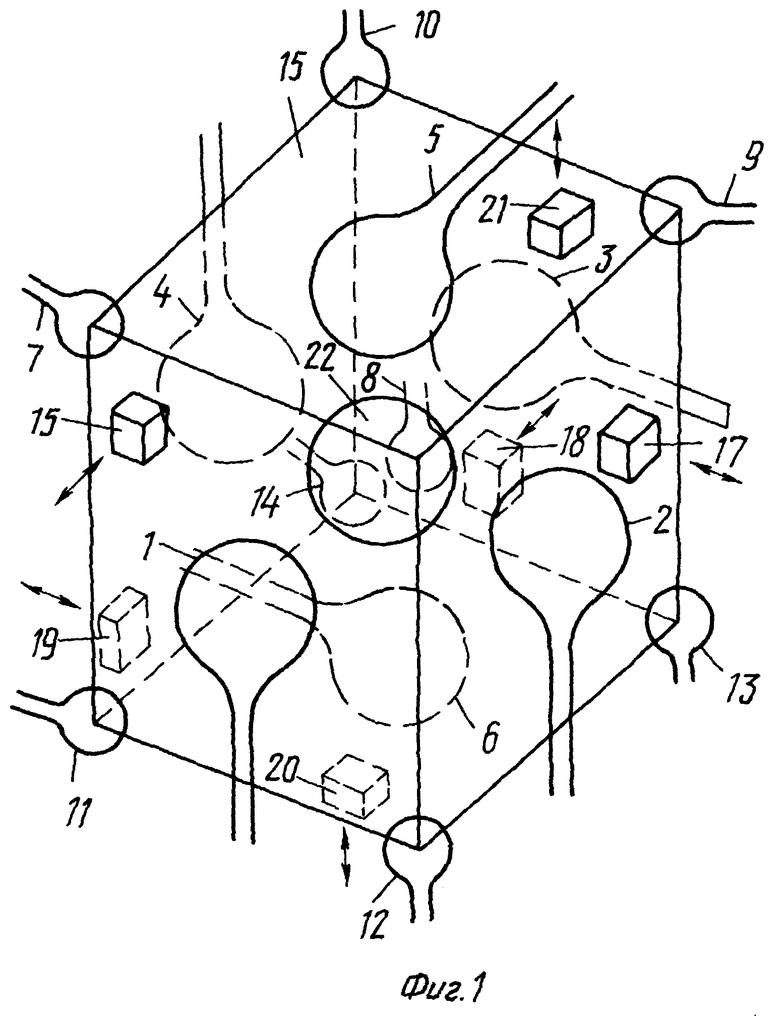
| Устройство для плавки металла во взвешенном состоянии | 1983 |
|
SU1117865A1 |
| Устройство для плавки металлов во взвешенном состоянии | 1974 |
|
SU476318A1 |
| ТИГЕЛЬ ДЛЯ ПЛАВКИ ВО ВЗВЕШЕННОМ СОСТОЯНИИ | 1996 |
|
RU2121121C1 |
| ЛЕТАТЕЛЬНЫЙ АППАРАТ СО СМЕШАННЫМ РЕЖИМОМ АЭРОДИНАМИЧЕСКОГО И КОСМИЧЕСКОГО ПОЛЕТА И СПОСОБ ЕГО ПИЛОТИРОВАНИЯ | 2007 |
|
RU2441815C2 |
| Многопостовая система питания | 1978 |
|
SU743806A1 |
| Токоподводящий мундштук | 1976 |
|
SU747648A1 |
| Многопостовая система питания | 1978 |
|
SU743806A1 |

