Изобретение относится к области авиационной техники, в частности к конструкциям дельтапланов.
Известен мотодельтаплан, содержащий мототележку с силовой установкой, гибкое крыло с каркасом из труб и тросовых растяжек, мачты, рулевой трапеции и обшивки (см. журнал "Моделист-конструктор", изд-во АО "Молодая гвардия", N8, 1993).
Недостатками данного аппарата являются балансирное управление аппаратом путем смещения центра тяжести пилота, обеспечиваемое рулевой трапецией, что обуславливает дискомфорт для пилота, т.к. такое управление является неестественным рефлексом человека и зачастую в условиях турбулентной атмосферы или срыва аппарата в "кувырок" приводит к аварийным ситуациям.
Наиболее близким по технической сущности и принятым за прототип является летательный аппарат, включающий гибкое крыло, состоящее из килевой и боковых балок, подвижной поперечной балки, мачты, несущих растяжек, обшивки, проводки управления креном и тангажем, кинематически связанные одним концом с ручкой управления аппаратом, и мототележку (см. заявка Великобритании N 2189752, МКИ 4, B 64 C 17/00, публ. РИ "Изобретения стран мира", выпуск 48, 1989).
Наряду с тем что управление в данном аппарате унифицировано и приведено к стандартной, привычной для пилота ручке управления, он обладает теми же недостатками, присущими аппаратам с балансирным управлением, так как управление осуществляется аналогичным образом путем смещения центра масс. Геометрия приведенных аппаратов, а также их управление не исключают выход летательных аппаратов на опасные режимы.
Кроме того, смещение мототележки относительно килевой балки аппарата обуславливает дискомфорт пилота, и пилотирование также небезопасно в силу ограниченных летно-технических характеристик. Кроме того, использование в качестве проводки по крену несущих растяжек боковых балок, кинематически связанных с ручкой управления аппаратом, является ненадежным решением в силу его многофункциональности, и в случае поломки или неисправности несущей растяжки, аппарат теряет две жизненно важные составляющие безопасного полета. Поэтому пилотирование в режиме турбулентной атмосферы или срыва аппарата в "кувырок" данным аппаратом ограничено.
В основу изобретения поставлена задача в летательном аппарате путем унифицирования системы управления обеспечить автоматическое изменение геометрии аппарата и за счет этого достичь комфортабельность и безопасность при пилотировании.
Поставленная задача достигается тем, что летательный аппарат, включающий мототележку, гибкое крыло, состоящее из килевой и боковых балок, подвижной поперечной балки, мачты, несущих растяжек и обшивки, проводки управления креном и тангажем, кинематически связанные одним концом с ручкой управления аппаратом, согласно изобретению, он снабжен хвостовым оперением с органами управления, при этом проводка управления креном другим концом кинематически связана с подвижной поперечной балкой, а проводка управления тангажем другим концом - с рулем высоты хвостового оперения, установленного на продолжении килевой балки, жестко связанной с мототележкой.
Снабжение летательного аппарата хвостовым оперением с органами управления во взаимосвязи с ручкой управления аппаратом и в совокупности с конструктивным решением подвижного каркаса крыльев под обшивку и проводок управления обеспечило создание аппарата с соответствующей геометрией, автоматически изменяющейся при пилотировании. Это позволило исключить управление аппаратом путем смещения центра тяжести, что создавало дискомфорт в управлении и опасность в экстремальных для полета режимах.
Таким образом, предлагаемая конструкция аппарата отличается унифицированной системой управления, приведя ее к стандартной и привычной для пилота, и как следствие комфортностью и высокими летно-техническими свойствами.
Сущность изобретения представлена на чертежах, где на:
фиг. 1 - представлен общий вид летательного аппарата;
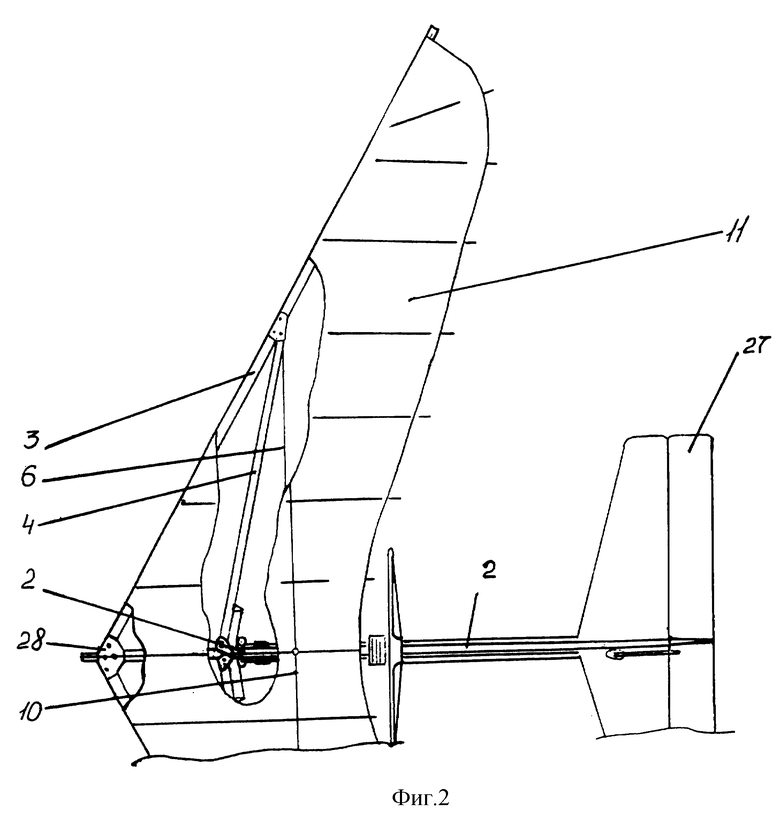
фиг. 2 - летательный аппарат (вид сверху):
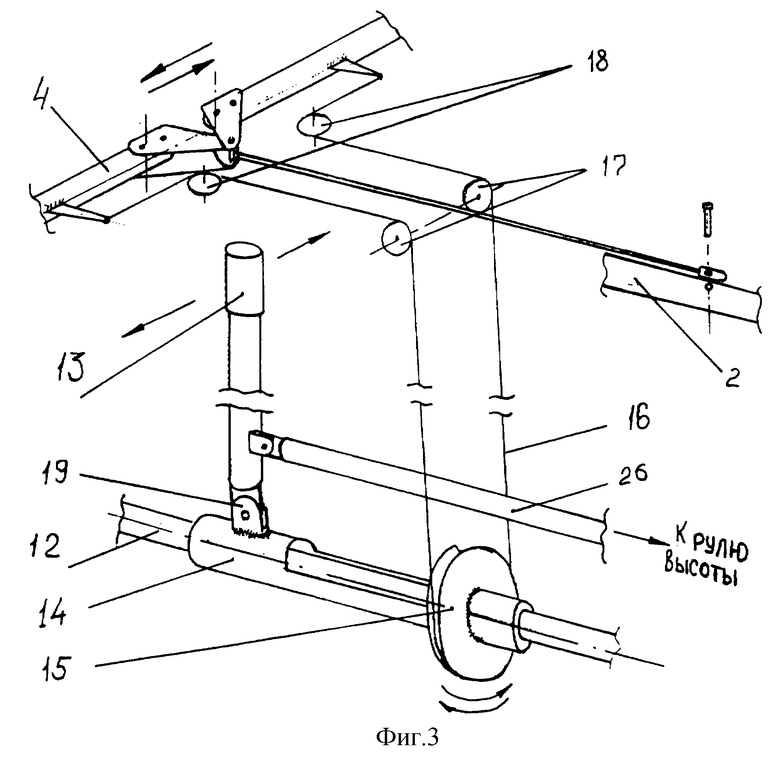
фиг. 3 - принципиальная схема проводок управления по крену и тангажу,
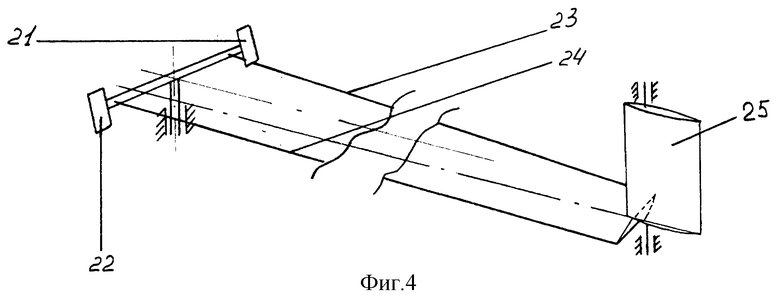
фиг. 4 - принципиальная схема проводки управления по курсу;
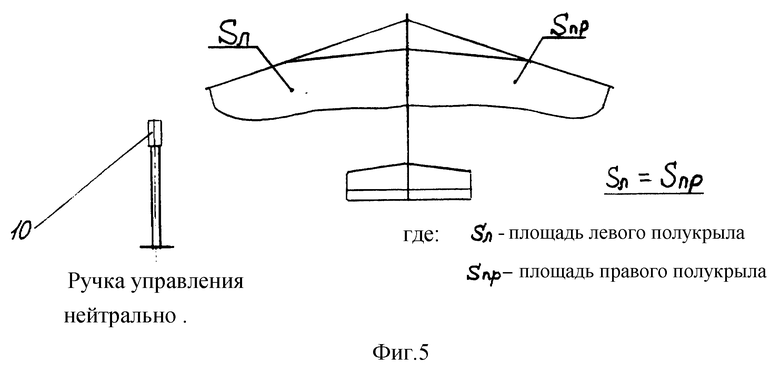
фиг. 5 - геометрия крыльев летательного аппарата при нейтральном положении ручки управления;
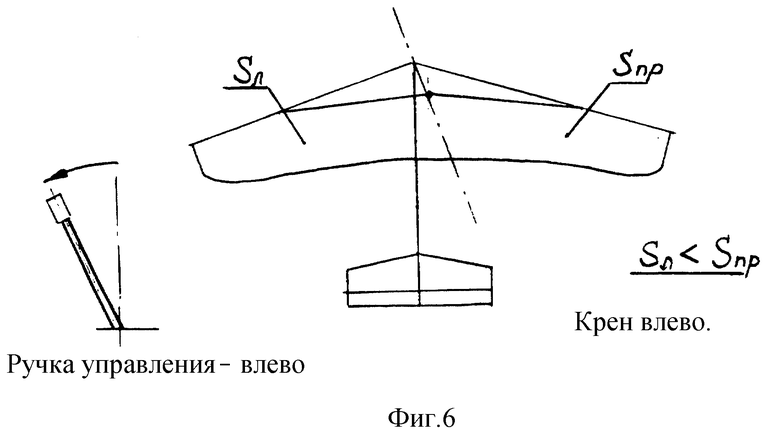
фиг. 6 - геометрия крыльев летательного аппарата при положении ручки управления "влево";
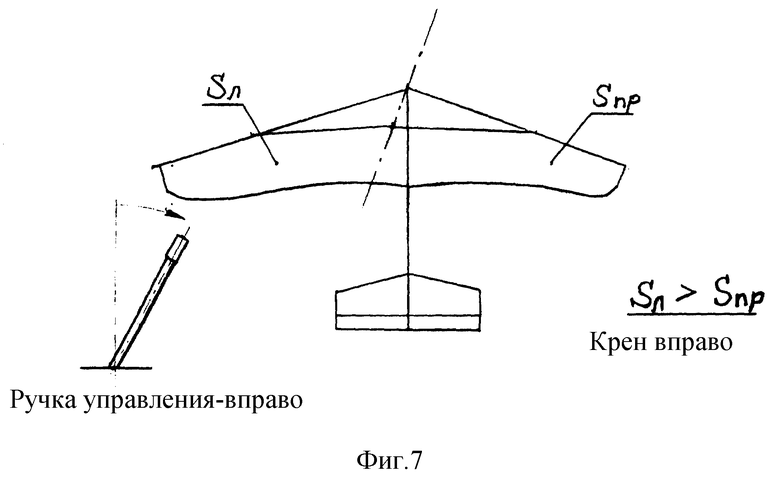
фиг. 7 - геометрия крыльев летательного аппарата при положении ручки управлении "вправо".
Летательный аппарат содержит гибкое крыло 1, состоящее из килевой 2, боковой 3 балок, подвижной поперечной балки 4, мачты 5, несущих растяжек 6, 7, 8, 9, 10 и обшивки 11. Килевая балка 2 жестко связана с мототележкой 12.
Проводка управления креном одним концом соединена с ручкой управления аппаратом 13 и выполнена в виде поворотной трубы 14, на которой размещены упомянутая ручка 13 и неподвижный блок 15, через который пропущен трос 16, ветви которого через подвижные блочки 17, 18 связаны с подвижной поперечной балкой 4. Ветви троса 16, связанные с подвижной поперечной балкой 4, образуют второй конец проводки управления креном.
Поворотная труба 14 установлена на мототележке 12, которая жестко связана с килевой балкой 2. Ручка управления аппаратом 13 установлена в проушине 19 с возможностью отклонения "вперед", "назад". Проушина 19 жестко связана с поворотной трубой 14.
Хвостовое оперение 20 установлено на продолжении килевой балки 2. Органы управления хвостового оперения содержат педали 21, 22, которые посредством тросов 23, 24 соответственно связаны с рулем направления 25.
Проводка управления тангажем выполнена в виде тяги 26, один конец которого соединен с ручкой управления аппаратом 13, а другой конец с рулем высоты 27 хвостового оперения 20. Свободные концы несущих растяжек 6, 7 зафиксированы на мототележке 12.
Боковые балки 3 связаны между собой посредством шарнира 28 с подвижной поперечной балкой 4 и образуют относительно шарнира подвижный каркас под обшивку 11.
Пилотирование летательным аппаратом осуществляется следующим образом.
При прямолинейном пилотировании ручка управления аппаратом 13 находится в нейтральном положении. Боковые балки 3 и подвижная поперечная балка 4 симметричны килевой балке 2. При этом площадь поверхности левого полукрыла (Sл) равна площади поверхности правого полукрыла (Sпр.) (см. фиг.5).
Управление летательным аппаратом по крену осуществляется отклонением ручки управления аппаратом 13 "влево" или "вправо".
При отклонении ручки управления аппаратом 13 "влево" поворотная труба 14 проворачивается вместе с неподвижным блоком 15. В ветвях троса 16 возникает разность усилий, которая через подвижные блочки 17, 18 передается подвижной поперечной балке 4. Ход подвижной поперечной балки 4 ограничен величиной выборки слабины несущих растяжек 6, 7, 10. Поперечная балка 4, смещаясь "вправо" увлекает за собой боковые балки 3. Левая боковая балка смещается относительно шарнира 28 в сторону килевой балки 2, а правая боковая балка от нее. В результате чего площадь левого полукрыла уменьшается, а правого увеличивается. За счет разности величин подъемных сил полукрыльев возникает крутящий момент, обеспечивающий крен аппарата "влево" (см. фиг. 6).
Для создания правого крена ручку управления отклоняют "вправо" и крен летательного аппарата достигается аналогично вышеизложенному (см. фиг.7).
Управление летательным аппаратом по тангажу осуществляется отклонением ручки управления аппаратом 13 "от себя" или "на себя".
При отклонении ручки управления аппаратом 13 "от себя" усилие по тягам 26 проводки управления от ручки управления 13 передается на руль высоты 27, который отклоняется вниз. Подъемная сила хвостового оперения 20 возрастает, возникает пикирующий момент и аппарат идет на снижение.
При отклонении ручки управления аппаратом 13 "на себя" руль высоты 27 отклоняется "вверх", подъемная сила уменьшается, возникает калибрующий момент, и аппарат набирает высоту.
Управление летательным аппаратом по курсу осуществляют органами управления 19 хвостового оперения 20. При даче левой педали "вперед" трос 24 натягивается, и за счет сил натяжения руль направления 25 отклоняется "влево". Возникающий при этом момент от аэродинамических сил на хвостовом оперении 20 способствует развороту аппарата "влево".
При даче правой педали 21 "вперед" руль направления 25 отклоняется "вправо" и аппарат разворачивается "вправо".
Таким образом достигается унифицированное управление аппаратом, обеспечивающее комфортабельность и безопасность при пилотировании.
Заявляемый аппарат испытан в промышленных условиях. Результаты испытаний подтвердили высокие летно-технические характеристики, комфортабельность и надежность при пилотировании.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЛЕТАТЕЛЬНЫЙ АППАРАТ И СПОСОБ УПРАВЛЕНИЯ ЛЕТАТЕЛЬНЫМ АППАРАТОМ | 2010 |
|
RU2461493C2 |
| КРЫЛО МНОГОФУНКЦИОНАЛЬНОГО СВЕРХЛЕГКОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 2001 |
|
RU2208541C1 |
| СПОРТИВНО-ПИЛОТАЖНЫЙ САМОЛЕТ | 1992 |
|
RU2005662C1 |
| АЭРОДИНАМИЧЕСКАЯ ПОВЕРХНОСТЬ И ПЛАНЕР ЛЕТАТЕЛЬНОГО АППАРАТА | 2017 |
|
RU2667410C1 |
| ЛЕТАТЕЛЬНЫЙ АППАРАТ | 1992 |
|
RU2097267C1 |
| ЛЕТАТЕЛЬНЫЙ АППАРАТ | 2011 |
|
RU2480378C1 |
| ДЕЛЬТАЛЕТ | 2008 |
|
RU2387580C2 |
| ПЛАНЕР ЛЕТАТЕЛЬНОГО АППАРАТА | 2016 |
|
RU2645522C1 |
| САМОЛЕТ БАЛАНСИРНОГО ТИПА БЕЗ ГОРИЗОНТАЛЬНОГО ОПЕРЕНИЯ С ПОВОРОТНЫМ КРЫЛОМ | 2004 |
|
RU2277496C1 |
| АВТОЖИР, СПОСОБ ЕГО ПРЕОБРАЗОВАНИЯ В СТОЯНОЧНОЕ ПОЛОЖЕНИЕ И СПОСОБ РЕГУЛИРОВАНИЯ ЕГО ЦЕНТРОВКИ | 1992 |
|
RU2005657C1 |
Изобретение относится к авиации. Аппарат включает мототележку, гибкое крыло, состоящее из килевой и боковых балок, подвижной поперечной балки, мачты, несущих растяжек и обшивки, проводки управления креном и тангажем, кинематически связанные одним концом с ручкой управления аппаратом, и хвостовое оперение с органами управления. Проводка управления креном другим концом кинематически связана с подвижной поперечной балкой. Проводка управления тангажем другим концом - с рулем высоты хвостового оперения, установленного на протяжении килевой балки, жестко связанной с мототележкой. Изобретение направлено на повышение комфорта и безопасности при пилотировании. 7 ил.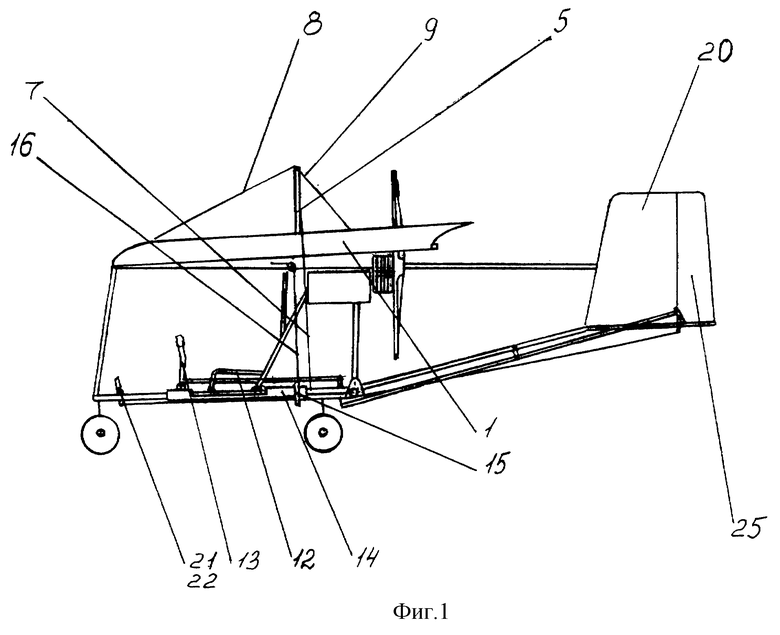
Летательный аппарат, включающий мототележку, гибкое крыло, состоящее из килевой и боковых балок, подвижной поперечной балки, мачты, несущих растяжек и обшивки, проводки управления креном и тангажем, кинематически связанные одним концом с ручкой управления аппаратом, отличающийся тем, что он снабжен хвостовым оперением с органами управления, при этом проводка управления креном другим концом кинематически связана с подвижной поперечной балкой, а проводка управления тангажем другим концом - с рулем высоты хвостового оперения, установленного на продолжении килевой балки, жестко связанной с мототележкой.
| СПОСОБ ПОЛУЧЕНИЯ СГУЩЕННОГО МОЛОЧНО-БЕЛКОВОГО ПРОДУКТА С САХАРОМ | 2000 |
|
RU2189752C2 |
| US 5217189 A, 06.08.1993 | |||
| МОДУЛЬНЫЙ ТЕПЛООБМЕННИК С ТЕПЛОВЫМИ ТРУБАМИ | 2011 |
|
RU2543104C2 |
| Дельтаплан | 1979 |
|
SU1084189A1 |

