Изобретение относится к способу и устройству для управления гидравлическим лифтом, причем регулирующее устройство вырабатывает управляющие сигналы, подаваемые к регулирующему клапанному устройству, которые регулируют расход рабочей жидкости таким образом, что кабина лифта ускоряется, движется с постоянной скоростью и замедляется при поступлении шахтной информации, сигнализирующей момент начала торможения.
У таких лифтов скорость движения более или менее зависит от изменений нагрузки кабины и температуры гидравлической жидкости, за счет чего соответственно изменяется управляемый регулирующим клапаном расход и точная остановка на этаже невозможна. Для устранения этого недостатка, незадолго до достижения этажа, переключают на небольшую постоянную скорость, так что возникающая за счет изменений нагрузки и/или температуры разность по высоте точки остановки может быть компенсирована (фиг. 3). Это приводит к увеличению времени движения и ожидания лифта и требует высокого расхода энергии. У гидравлических лифтов, кроме того, продолжительность движения с ползучей скоростью, как известно, зависит от нагрузочных и температурных условий.
Из патента ФРГ N 3638247 известно устройство для гидравлического лифта, которое устраняет описанные выше недостатки. При этом предусмотрено управляющее устройство, которое вырабатывает определяющие скоростную характеристику кабины и выходные сигналы, подаваемые к управляющему клапану. Управляющий клапан подает рабочую жидкость из ее источника в соответствии с выходными сигналами к приводящему кабину в действие гидроцилиндру и наоборот. В памяти, соединенной посредством вычислительного блока с управляющим устройством, накоплены значения опорной скорости, соответствующие определенным рабочим состояниям, отнесенным к различным нагрузочным и/или температурным условиям. Установленный на кабине датчик регистрирует фактическую скорость и подает ее значение через преобразовательный блок к вычислительному блоку. При этом из измеренной на фазе ускорения фактической скорости и заданной опорной скорости образуют разность, на основе которой вычислительный блок рассчитывает кривую управляющей скорости. Эту кривую управляющей скорости накапливают и на фазе замедления используют для корректировки фактической скорости до значения заданной опорной скорости. Таким образом должно обеспечиваться точное и быстрое управление местом назначения и сокращения тем самым эксплуатационного времени лифта. При этом, однако, управляющее устройство, не содержащее регулирующего контура и регулирования момента начала торможения, не может обойтись без ползучей скорости.
В основу изобретения положена задача создания способа и устройства для осуществления способа, с помощью которых обеспечивается непосредственное прибытие на этаж без движения с ползучей скоростью.
Эта задача решается благодаря тому, что при способе управления гидравлическим лифтом, заключающемся в том, что посредством регулирующего устройства с помощью соединенного с кабиной датчика осуществляют вырабатывание управляющих сигналов (S), подаваемых к регулирующему клапанному устройству, которое регулирует расход рабочей жидкости, подаваемой к гидравлическому подъемному устройству, таким образом, что кабина ускоряется при движении в направлении вниз или вверх, движется с рабочей скоростью и замедляется при поступлении шахтной информации, сигнализирующей о точке начала торможения, посредством упомянутого датчика осуществляют прием сигналов пути перемещения кабины для определения начала торможения и регулируют скорость движения кабины на фазе замедления в зависимости от пути, для чего после подачи команды движения определяют и накапливают первое значение пути (S1) управляющего сигнала (S) в момент пуска кабины, при поступлении сигнала начала торможения накапливают второе значение (S2) управляющего сигнала (S) регулирующего устройства, вычисляют диапазон управления (CS) из соотношения CS= S2-S1+H, где S1 - первое значение управляющего сигнала, S2 - второе значение управляющего сигнала, а H - предварительно определяемое значение гистерезиса, на фазе замедления из сигналов пути вырабатывают фактические значения (Si) пути, определяют соответствующее каждому фактическому значению (Si) пути процентное значение (%S) диапазона управления (CS), и процентные значения (%S) умножают на значение диапазона (CS) для определения величины используемого на фазе замедления управляющего сигнала (S).
Характеризующий положение главного поршня регулирующего клапанного устройства сигнал, отбираемый предпочтительно от связанной с поршневым штоком пружины, служит сигналом обратной связи.
К определяющему управляющий сигнал произведению прибавляют отклонение (CO) управления и предварительный управляющий сигнал (SO), причем (CO) находят из соотношения CO = S2-SO-CS, где S2 - второе значение управляющего сигнала, SO - предварительный управляющий сигнал, а CS -диапазон управления, и полученная таким образом сумма образует используемый на фазе замедления управляющий сигнал.
Значение (H) гистерезиса определяют при пробном движении, причем управляющий сигнал (S) увеличивают, пока скорость не достигнет заданного значения, по достижении заданного значения величину управляющего сигнала (S) измеряют и накапливают, затем продолжают увеличивать управляющий сигнал (S) и через некоторое время снова уменьшают, пока не будет достигнуто снова заданное значение скорости, величину управляющего сигнала (S) еще раз измеряют и из обоих измеренных значений образуют разность, являющуюся значением (H) гистерезиса.
Предварительный управляющий сигнал (SO) определяют при пробном движении, причем электромагнит регулирующего клапанного устройства нагружают периодически возрастающим управляющим сигналом (S) до тех пор, пока кабина не тронется, и полученный таким образом управляющий сигнал уменьшают на постоянное значение и регистрируют в качестве предварительного управляющего сигнала (SO).
Предельный управляющий сигнал (SL) определяют при пробном движении, причем электромагнит регулирующего клапанного устройства нагружают периодически возрастающим управляющим сигналом (S) до тех пор, пока скорость кабины не будет больше возрастать.
Перемещение кабины в предшествующем фазе замедления движении осуществляют в нерегулируемом режиме работы, причем, при движении кабины вверх, скорость ограничивают путем расчета гидравлических компонентов, например, насоса.
Кроме того, указанная задача решается благодаря тому, что в устройстве управления гидравлическим лифтом, содержащем регулирующее устройство, управляющее регулирующим клапанным устройством, и соединенный с кабиной датчик, регулирующее устройство содержит по меньшей мере один преобразователь тахосигналов, при этом датчик присоединен ко входу преобразователя тахосигналов, регулирующее устройство содержит также регулятор пути, вход которого соединен с выдающим фактические значения (Si) выходом преобразователя тахосигналов, а выход соединен в фазе замедления с регулирующим клапанным устройством, регулятор пути содержит таблицу, в которой накоплены соответствия фактических значений (Si) пути процентным значениям (%S) диапазона управления (CS) и умножитель, один выход которого соединен с таблицей, а к другому подается значение диапазона управления (CS), а его выход образует выход регулятора пути.
Регулирующее клапанное устройство содержит предпочтительно пружину сжатия, определяющую положение главного поршня этого устройства и образующую обратную связь.
Достигнутые изобретением преимущества следует усматривать в том, что время движения и ожидания сокращается, рабочая жидкость меньше нагревается и расход энергии уменьшается. Благодаря предложенному непосредственному прибытию на этаж при использовании регулирующего клапанного устройства с простым по конструкции возвратом в исходное положение достигается точная остановка без дополнительного регулирования уровня, а в отношении комфорта движения и минимального времени движения - оптимальный результат замедления. Преимущество также в том, что ускорение кабины и движение с номинальной скоростью могут происходить без регулирования, что благоприятно сказывается на КПД гидравлического лифта. Другое преимущество следует усматривать в том, что использование регулирующего клапанного устройства, находящегося во взаимодействии с регулирующим устройством, делает возможным автоматическое определение специфичных для лифта параметров с помощью пробной поездки. Это исключает ручные регулировочные работы при пуске лифта в эксплуатацию.
Ниже изобретение более подробно поясняется с помощью изображенного на чертеже примера его осуществления.
На фиг. 1 схематично изображено устройство согласно изобретению;
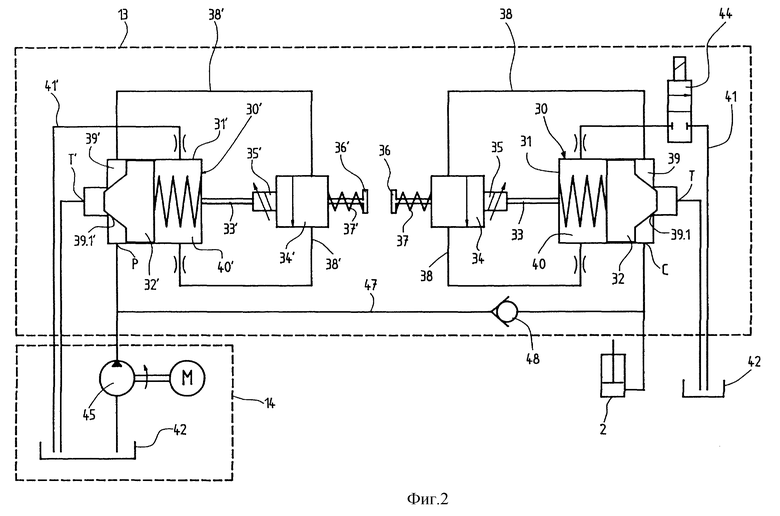
на фиг. 2 схематично изображен регулирующее клапанное устройство;
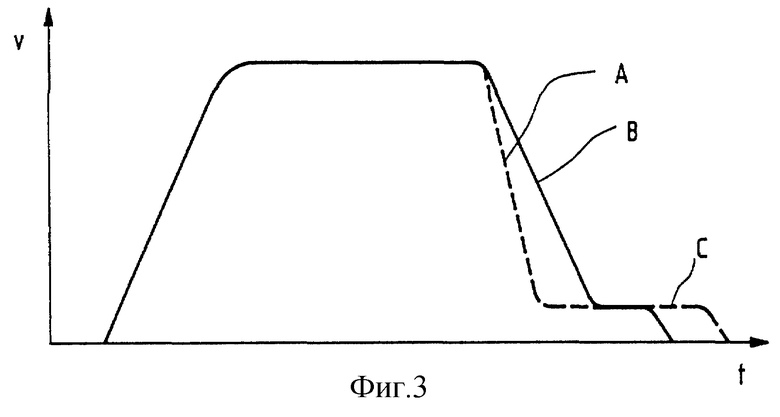
на фиг. 3 - диаграмма скорость - время гидравлического лифта согласно уровню техники;
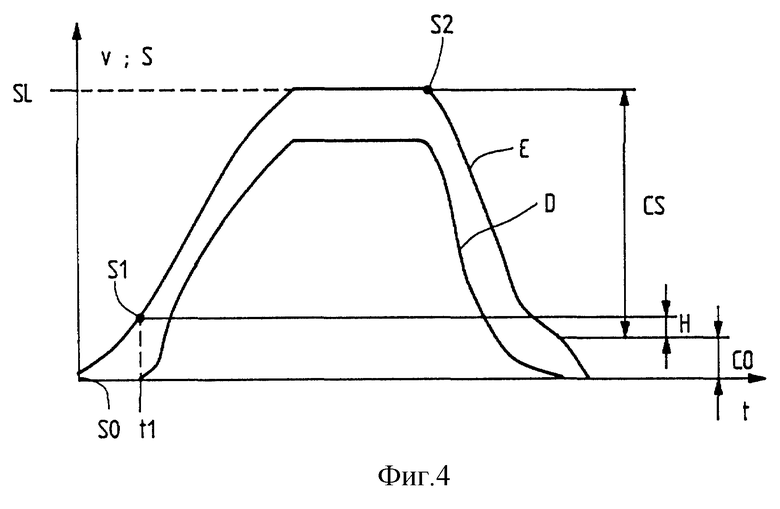
на фиг. 4 - диаграмма скорость - время и диаграмма управляющий сигнал - время гидравлического лифта, управляемого устройством согласно изобретению;
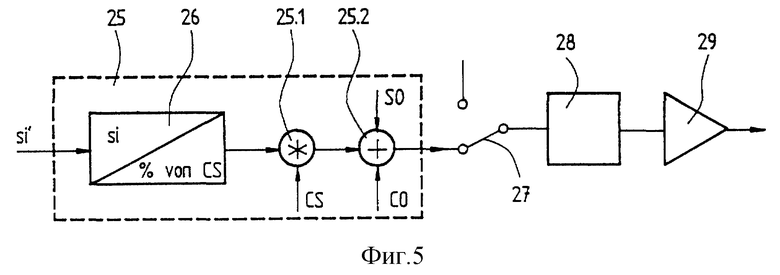
на фиг. 5 - блок-схема регулятора пути устройства, представленного на фиг. 1.
На фиг. 1 кабина 1 может быть приведена в движение посредством гидравлического подъемного устройства 2, содержащего поршень 3 и цилиндр 4. Движение передается тросом 5, проходящим по двум закрепленным на поршне 3 роликам 6, двум закрепленным на кабине 1 роликам 7 и неподвижно установленному ролику 8, причем кабина 1 движется в шахте 9. Установленные в шахте 9 выключатель 10, соединенный с кабиной 1, датчик 11 и командоаппарат 12 соединены с предпочтительно цифровым регулирующим устройством 20. Датчик 11 содержит колесо, обкатывающееся по натянутому вдоль шахты 9 тросу, и подает сигналы пути в форме импульсных сигналов. Датчик 11 может работать описанным или иным образом механически, а также электрически или оптически. Более подробно описываемое ниже с помощью фиг. 2 регулирующее клапанное устройство 13 электрически соединено с выходом регулирующего устройства 20 и трубопроводами для рабочей жидкости присоединено к гидравлическому подъемному устройству 2 и источнику 14 рабочей жидкости.
Командоаппарат 12 подает к регулирующему устройству 20 команды движения. Сигналы начала торможения подают к нему от блока управления 21, являющегося составной частью регулирующего устройства 20. Сигналы начала торможения поступают от шахтных выключателей 10, установленных с определенными промежутками перед полами этажей. Сигналы начала торможения могут также подаваться от датчика 11, причем, например, при определенном числе суммированных сигналов пути вырабатывается соответствующая шахтная информация. Регулирующее устройство 20 вырабатывает сигнал S, подаваемый регулирующему клапанному устройству 13.
Блок управления 21 соединен с преобразователем тахосигналов, который преобразует подаваемые датчиком 11 сигналы пути в фактические значении vi скорости или фактические значения Si пути. Регулятор 23 скорости соединен входом с выдающим фактические значения vi скорости выходом преобразователя 22 тахосигналов и с выдающим заданные значения vs скорости выходом датчика 24 заданных значений скорости, вход которого соединен с блоком управления 21. Посредством другого, соединенного с блоком управления 21 входа, регулятор 23 скорости может быть заново установлен или включен. Для регулятора 23 скорости может быть использован обычный ПИД-регулятор. Более подробно описываемый с помощью фиг. 5 регулятор 25 пути соединен входом с блоком управления 21 и с выдающим фактические значения Si пути выходом преобразователя 22 тахосигналов. К регулятору 25 пути относится таблица 26, в которой накоплены соответствия фактических сигналов Si пути процентным значениям %S описываемого с помощью фиг. 4 диапазона CS управления. Коммутационное устройство 27 соединено с выходом блока управления 21, выходом регулятора 23 скорости, выходом регулятора 25 пути и входом цифроаналогового преобразователя 28. Посредством коммутационного устройства 27 выход регулятора 25 пути при поступлении шахтной информации, сигнализирующей о моменте начала торможения, может быть подключен к входу цифроаналогового преобразователя 28. Его выход соединен с усилителем 29, выход которого образует выход регулирующего устройства 20.
Изображенное на фиг. 2 регулирующее клапанное устройство 13 содержит два одинаковых электрогидравлических дроссельных клапана 30, 30'. Нижеследующее описание дроссельного клапана 30 для управления процессом опускания равным образом относится к изображенному зеркально-симметрично дроссельному клапану 30' для подъема кабины, в котором использованы те же, однако обозначенные штрихом детали.
В клапанной камере 31 перемещается главный поршень 32, из которого сзади выступает шток 33. Вокруг него без функциональной связи расположен контрольный клапан 34 с электромагнитом 35, электрически соединенный с выходом регулирующего устройства 20 (фиг. 1). Шток 33 выступает сзади из контрольного клапана 34 и имеет на конце упор 36, причем между упором 36 и контрольным клапаном 34 расположена пружина сжатия 37, действующая против усилия электромагнита 35. Посредством пружины сжатия 37 образуется замкнутый регулирующий контур с внутренней обратной связью в контрольном клапане 34. Контрольный клапан расположен в соединительной линии 38 и регулирует расход через нее. Линия 38 соединяет переднее 39 и заднее 40 отделения клапанной камеры 31.
Переднее отделение 39 имеет выпуск С, связанный через регулируемый проход 39.1 с выпуском Т, заканчивающимся в резервуаре 42. Впуск С связан с цилиндром 4 подъемного устройства 2. Заднее отделение 40 также связано с резервуаром 42 через сливную линию 41. В сливной линии 41 находится электромагнитный запорный клапан 44.
Регулирующее клапанное устройство работает с возвратом подъемного усилия, то есть усилие пружины сжатия 37, представляющее собой положение главного поршня 32, измеряют, и оно служит сигналом обратной связи. Благодаря этому достигается пропорциональность усилия электромагнита 35 или величины управляющего сигнала S положению главного поршня 32. Это решение имеет хорошую динамическую характеристику и является экономичным, а также простым по конструкции. Однако могут найти применение и другие, например гидравлические, электрические или механические обратные связи.
У дроссельного клапана 30' выпуск T' переднего отделения 39' также связан с резервуаром 42. Впуск P связан с работающим от электропривода насосом 45 источника 14 рабочей жидкости. Насос 45 всасывает ее из резервуара 42. Дроссельный клапан 30' не требует в своей сливной линии 41' запорного клапана.
Впуски C и P связаны между собой соединительной линией 47 с обратным клапаном 48. Обратный клапан 48 действует так, что рабочая жидкость не может течь от подъемного устройства 2 обратно в направлении насоса 45.
При остановке кабины 1 сигнал S равен 0 и дроссельный клапан 30 закрыт (гидравлически). Это достигается за счет приоткрытого контрольного клапана 34, так что отделения 39, 40 связаны между собой и давление, действующее в заднем отделении 40 на большую поверхность задней стороны главного поршня 32, смещает его в направлении отделения 39. При остановке и движении вверх кабины 1 запорный клапан 44 закрыт. При остановке кабины 1 дроссельный клапан 30' открыт.
При команде движения вниз регулирующее устройство 20 вырабатывает сигнал S, соответствующий закрытому положению дроссельного клапана 30, т.е. контрольный клапан 34 открывается настолько, что сечение его отверстия становится больше сечения отверстия запорного клапана 44. При последующем открывании запорного клапана 44 главный поршень 32, несмотря на стекание рабочей жидкости через линию 41, остается в своем закрытом положении. Затем электромагнит 35 получает сигнал S', обратно пропорциональный сигналу S и вызывающий, в принципе, следующее: усилие электромагнита 35 направлено против усилия пружины сжатия 37. Если главный поршень 32 за счет разности давления в отделениях 39, 40 сместится настолько, что расход через соединительную линию 38 будет равен расходу через сливную линию 41, то главный поршень 32 остановится и останется в этом положении, пока не изменится управляющий сигнал S.
При возрастании сигнала S, т.е. при уменьшении сигнала S', уменьшается и сечение отверстия контрольного клапана 34, и главный поршень 32 за счет меньшего давления в заднем отделении 40 возвращается обратно. Проход 39.1 открыт, и рабочая жидкость течет из подъемного устройства 2 в резервуар 42, в результате чего кабина 1 опускается. Сигнал S возрастает до тех пор, пока кабина 1 не достигнет нужной максимальной скорости. Сигнал S остается на этом уровне, пока не поступит сигнал начала торможения. Начиная с этого момента, регулирующее устройство 20 снова уменьшает сигнал в зависимости от пути, в результате чего поршень 32 движется в направлении прохода 39.1, пока полностью не закрытого, с тем чтобы остановить кабину 1. В этот момент закрывается и запорный клапан 44. Дроссельный клапан 30' остается открытым при движении кабины вниз.
Дроссельный клапан 30' для подъема кабины 1 функционирует, в принципе, также, как дроссельный клапан 30, правда, с тем отличием, что сигнал S' для электромагнита 35' пропорционален сигналу S. При команде движения вверх включается насос 45, который накачивает рабочую жидкость в отделение 39' и через клапанную щель 39.1' в резервуар 42. Затем контрольный клапан 34' получает сигнал S', что приводит к открыванию соединительной линии 38'. После этого рабочая жидкость течет от переднего отделения 39' к заднему отделению 40'. При определенном значении сигнала S сечение отверстия контрольного клапана 34' становится больше сечения сливной линии 41'. Таким образом возрастает давление в заднем отделении 40', и главный поршень 32' движется вперед и сужает клапанную щель 39.1'. Как только давление в отделении 39' превысит давление в подъемном устройстве 2, открывается обратный клапан 48 и кабина 1 приводится в движение. При полностью закрытой клапанной щели 39.1' лифт движется вверх с максимальной скоростью.
Процесс ускорения, а также движение с номинальной или рабочей скоростью может протекать без регулирования. При движении вверх может быть таким образом использована полная недросселированная мощность насоса 45. Максимальная скорость кабины 1 определяется тогда мощностью насоса. Скорость движения вниз можно ограничить за счет соответствующего расчета отверстия диафрагмы в сливной линии подъемного устройства 2.
В изображенном примере исполнения предусмотрены два контрольных клапанных устройства, причем в каждом направлении движения активно только одно из них. В другом варианте исполнения предусмотрено только одно контрольное клапанное устройство для обоих направлений движения, попеременно управляющее обоими дроссельными клапанами 30, 30'.
На изображающей уровень техники фиг. 3 буквой v обозначена скорость, а буквой t - время. В зависимости от нагрузки и температуры рабочей жидкости на фазе замедления возникают разные характеристики A, B скорость - время, так что для точной остановки на этаже требуется ползучая скорость C.
На фиг. 4 также буквой v обозначена скорость, а буквой t - время, причем ось v, кроме того, соответствует выработанному регулирующим устройством 20 управляющему сигналу S. Характеристика D представляет фактическую скорость, а характеристика E - управляющий сигнал S на выходе регулирующего устройства 20 при движении кабины 1. Кроме того, обозначают: SO, S1, S2 - определенные значения управляющего сигнала S, CS - диапазон управления, H -значение гистерезиса, СО - отклонение управления.
На фиг. 5 таблица 26, посредством которой на фазе замедления образуют соответствующие фактическим значениям Si пути управляющие сигналы для регулирующего клапанного устройства 13, соединена со входом умножителя 25.1, который умножает соответствующее актуальному фактическому значению Si' пути процентное значение %S диапазона управления на вычислительное значение диапазона CS управления. Для улучшения результата регулирования выход умножителя 25.1 соединен со входом сумматора 25.2, который прибавляет к произведению умножителя 25.1 отклонение СО управления и предварительный управляющий сигнал SO и выход которого образует выход регулятора 25 пути.
Регулирующее устройство 20 работает следующим образом. При поступлении команды движения от командоаппарата 12 блок управления 21 заново устанавливает или активирует регулятор 23 скорости, а коммутационное устройство 27 подключает вход цифроаналогового преобразователя 28 к выходу регулятора 23 скорости. На фазе ускорения и при движении с постоянной скоростью управление кабиной 1 происходит путем сравнения фактических vi и заданных vs значений скорости, причем управляющий сигнал S на выходе регулирующего устройства 20 происходит согласно характеристике E (фиг. 4). После поступления команды движения кабина 1 в момент t1 пуска приходит в движение, и одновременно накапливается первое значение 1 управляющего сигнала S (фиг. 4). При достижении кабиной 1 точки начала торможения соответствующий шахтный выключатель 10 или датчик 11 посылает блоку управления 21 шахтную информацию, в результате чего начинается фаза замедления. При этом активируется регулятор 25 пути, и коммутационное устройство 27 подключает его выход к входу цифроаналогового преобразователя 28. В тот же момент накапливается второе значение 32 управляющего сигнала и вычисляется диапазон управления CS по отношению
CS = S2-S1+H (фиг. 4), где S1 и S2- первое и второе значения управляющего сигнала S, а И - значение гистерезиса, определяемое описываемым ниже образом. Регулятор 25 пути работает теперь так, что, как уже описано с помощью фиг. 5, соответствующие фактическим значениям Si' пути процентные значения %S умножаются на вычисленное значение диапазона регулирования CS, и к этому произведению прибавляются отклонения СО управления и предварительный управляющий сигнал SO, причем
CO = S2-SO-CS (фиг. 4). Вычисленная таким образом сумма подается через коммутационное устройство 27 и цифроаналоговый преобразователь 28 к усилителю 29 (фиг. 1), на выходе которого она возникает как актуальный управляющий сигнал S.
Как уже упомянуто в описании к фиг. 2, в выбранном регулирующем клапанном устройстве 13 положение главного поршня 32 точно пропорционально управляющему сигналу S. Выработанный регулятором 23 скорости управляющий сигнал S зависит от нагрузки и температуры только до момента начала торможения. Поскольку, однако, диапазон управления CS для фазы замедления к актуальным постоянным при движении нагрузочным и температурным условиям заново устанавливается с помощью значений S1, S2, H, может быть достигнута точная непосредственная остановка на этаже без необходимости дополнительного регулирования уровня.
Значение гистерезиса H определяют при пробном движении следующим образом. Управляющий сигнал S увеличивают, пока скорость не достигнет заданного значения. До достижении заданного значения величину управляющего сигнала S измеряют и накапливают. После этого управляющий сигнал S продолжают увеличивать и через некоторое время снова уменьшают, пока снова не будет достигнуто заданное значение скорости. Затем еще раз измеряют величину управляющего сигнала S и из обоих измеренных значений образуют разность, являющуюся значением H гистерезиса.
Другие специфичные для лифта параметры, связанные с непосредственной остановкой на этаже, например предварительный управляющий сигнал SO или предварительный управляющий сигнал SL, также определяют при пробном движении.
Предварительный управляющий сигнал SO вызывает, с одной стороны, незамедлительное трогание кабины лифта после команды пуска, а с другой стороны, с его помощью можно значительно уменьшить рывок при трогании. Для определения предварительного управляющего сигнала SO электромагнит 35 регулирующего клапанного устройства нагружают периодически возрастающим управляющим сигналом S до тех пор, пока кабина лифта не тронется. Полученный при этом управляющий сигнал уменьшают на постоянное значение и накапливают в качестве предварительного управляющего сигнала SO. При поступлении команды движения регулирующее клапанное устройство 12 нагружается непосредственно предварительным управляющим сигналом SO.
Предельный управляющий сигнал SL является тем управляющим сигналом S, при котором главный поршень 32 регулирующего клапанного устройства 13 достигает своего конечного положения. Регулирующее устройство 20 работает таким образом, что значение управляющего сигнала никогда не превышает значения предельного управляющего сигнала SL. Как пояснено выше, гидравлический лифт движется обычно с регулированием скорости. С помощью определяемого при пробном движении предельного управляющего сигнала SL возможен нерегулируемый режим работы во время постоянного движения и регулируемый по пути режим работы на последующей фазе замедления.
В режим работы с регулированием скорости часть рабочей жидкости, подаваемой из источника 14, направляется по перепускной линии в резервуар 42. В нерегулируемом режиме работы регулирующее клапанное устройство 13 нагружается предельным управляющим сигналом SL, так что достигается полная подача рабочей жидкости из источника 14 подъемное устройство 2, благодаря чему значительно повышается его КПД. Переход от нерегулируемого постоянного движения к регулируемому по пути замедленному движению происходит без задержки регулирования, поскольку значение предельного управляющего сигнала SL также в предшествующем нерегулируемом режиме таково, что главный поршень 32 может незамедлительно следовать за предельным управляющим сигналом SL. Для определения предельного управляющего сигнала SL катушку регулирующего клапанного устройства нагружают периодически возрастающим управляющим сигналом S до тех пор, пока скорость кабины лифта не будет больше возрастать. Определяемый при этом управляющий сигнал накапливается регулирующим устройством 20 в качестве предельного управляющего сигнала SL.
Устройство согласно изобретению может быть реализовано предпочтительно посредством микроЭВМ.
Изобретение относится к способу и устройству управления гидравлическим лифтом, позволяющим обеспечить регулирование расхода рабочей жидкости. Способ и устройство позволяют достичь точного непосредственного прибытия на этаж без необходимости движения с ползучей скоростью. При этом кабиной управляют на фазе замедления в зависимости от пути, для чего образуют диапазон управления (CS), разделенный на процентные значения. Процентные значения приводят в табличной форме в соответствии с измеренными фактическими значениями пути. При поступлении определенного фактического значения пути соответствующее процентное значение умножают на значение диапазона управления (CS) и к произведению при необходимости прибавляют отклонение (CO) управления и предварительный управляющий сигнал (SO), причем сумма образует используемый на фазе замедления актуальный управляющий сигнал (S), подаваемый к регулирующему клапанному устройству. Устройство содержит регулирующее устройство, управляющее клапанным устройством, и соединенный с кабиной датчик, при этом регулирующее устройство содержит, по меньшей мере, один преобразователь тахосигналов и регулятор пути. 2 с. и 7 з.п.ф-лы, 5 ил.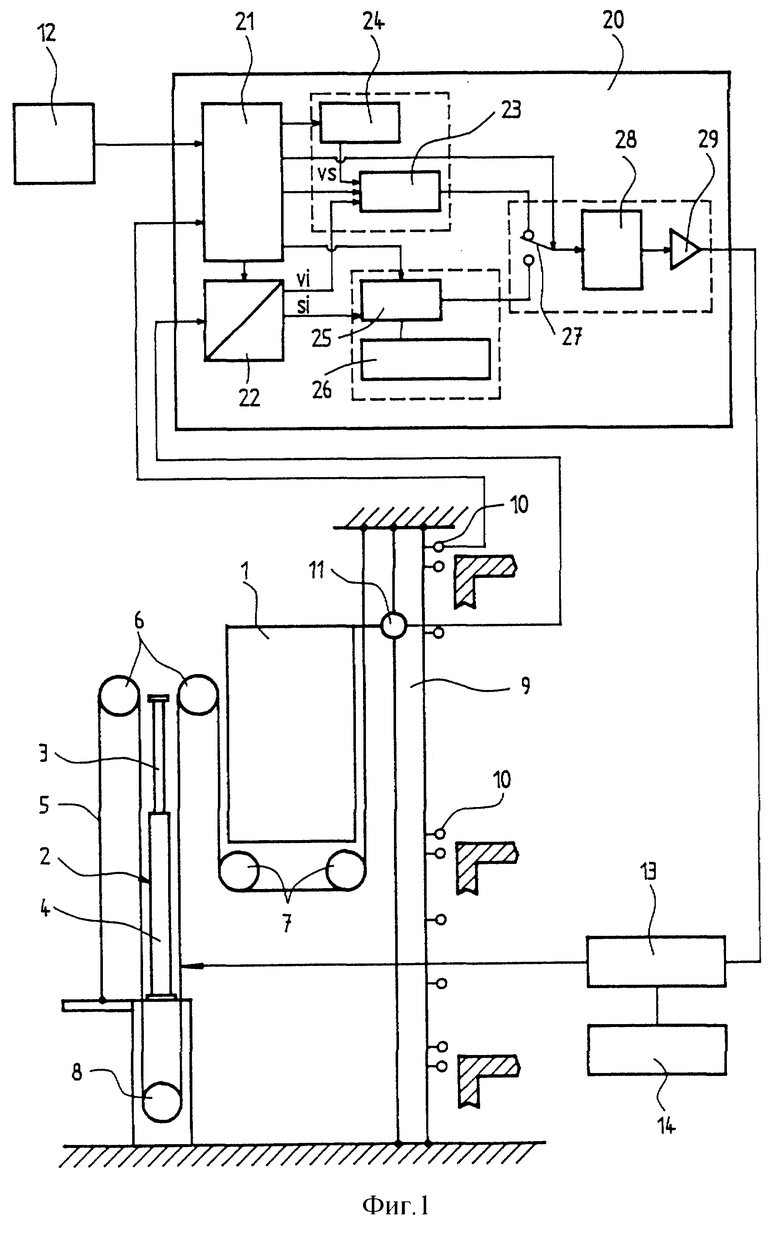
| DE 3720437 A1, 23.12.87 | |||
| DE 3414793 A1, 25.10.84 | |||
| DE 3638247 A1, 27.05.87 | |||
| SU 755736 A1, 25.08.80. |

