Изобретение относится к способу эксплуатации устройства видеоконтроля за тормозной системой в лифтовой установке и к соответствующему устройству видеоконтроля за тормозной системой. Кроме того, изобретение относится к способу дооснащения или модернизации существующей лифтовой установки таким устройством видеоконтроля за тормозной системой.
Лифтовые системы традиционного типа имеют, в общем, приводной механизм, присоединенное к приводному механизму устройство управления приводным механизмом и тормозную систему. Время от времени существующие лифтовые установки модернизируются, с целью улучшения эффективности потребления энергии, для повышения надежности и для выполнения новейших технических условий допуска к эксплуатации.
В процессе модернизации большое значение придается, в частности, аспекту безопасности, и зачастую осуществляется замена приводных механизмов и/или устройств управления приводными механизмами. В качестве нового устройства управления приводным механизмом обычно используется VVVP (variable voltage variable frequency; управление с переменным напряжением или с переменной частотой) или ACVF (alternating current variable frequency; управление переменным током с переменной частотой). В качестве нового приводного механизма в предпочтительном варианте может использоваться приводной механизм Schindler SGB 142. В таком приводном механизме Schindler SGB 142 стопорный тормоз выполняет предписания инструкции по технике безопасности, и более не должно быть предусмотрено никакого дополнительного тормоза с тросовым приводом или ловителя лифта. Условием при этом является, правда, то, что стопорный тормоз вновь установленного приводного механизма соответствующим образом контролируется.
И при использовании новых лифтовых установок существует необходимость в более качественном контроле за тормозными системами.
Стопорные тормоза могут приходить в негодность, если при запуске приводного механизма они отпускаются неправильно. Кроме того, при заклинивании тормоза может выделяться дым, что, при определенных обстоятельствах, может приводить к возникновению опасности для пассажиров. Выделение дыма может происходить потому, что приводной механизм зачастую имеет достаточный движущий момент, чтобы и при заклинивающем тормозе обеспечивать режим движения.
В качестве примера вариант устройства для контроля системы управления лифтовой установкой можно заимствовать из описания изобретения к патенту ЕР 903314 B1.
Поэтому стоит задача предусмотреть соответствующее устройство контроля отпуска для лифтовых установок, например, для модернизированных лифтовых установок с вновь установленными приводными механизмами, наличие которого позволяет контролировать стопорный тормоз.
Так как существующие лифтовые установки могут быть модернизированы также и посредством того, что контролируется стопорный тормоз имеющегося приводного механизма, в качестве задачи предложенного на рассмотрение изобретения рассматривается и вариант создания устройства контроля отпуска и для ситуаций такого рода. Разрабатываемое устройство контроля отпуска должно быть в целом применимо и для новых лифтовых установок.
Поэтому в предпочтительном варианте устройство контроля отпуска должно быть выполнено универсальным в использовании и гибким, чтобы можно было использовать одно и то же устройство контроля в различных лифтовых установках. В предпочтительном варианте устройство контроля отпуска должно быть рассчитано таким образом, чтобы посредством некоторых небольших перестановок в ручном режиме и/или посредством перепрограммирования можно было осуществить подгонку под соответствующую имеющуюся ситуацию.
В соответствии с изобретением предлагается способ, отличающийся следующими этапами. Принимаются первый сигнал растормаживания тормозной системы и первый сигнал движения устройства управления приводным механизмом. Затем осуществляется контроль того, прилагается ли после приложения первого сигнала движения первый сигнал растормаживания, причем этот сигнал растормаживания появляется тогда, когда тормоз тормозной системы был отпущен. В случае, если этот сигнал растормаживания не принимается в пределах временного окна, тогда активируется релейная цепь для прерывания цепи обеспечения безопасности лифтовой установки или прерывается управляющее напряжение устройства управления приводным механизмом, с целью остановки лифта.
В соответствии с изобретением предлагается устройство видеоконтроля за тормозной системой, которое имеет первый вход для сигналов торможения, чтобы соединить устройство видеоконтроля за тормозной системой с первым электрическим тормозным контактом тормозной системы. Далее предусмотрен вход для сигналов движения, чтобы соединить устройство видеоконтроля за тормозной системой с первым электрическим проводом для сигналов движения устройства управления приводным механизмом. Устройство видеоконтроля за тормозной системой включает в себя устройство подачи напряжения, чтобы обеспечить устройство видеоконтроля за тормозной системой, по меньшей мере, одним рабочим напряжением, микропроцессор, а также релейную цепь. Релейная цепь проведена таким образом, что выполнена с возможностью активирования посредством микропроцессора, чтобы посредством активирования релейной цепи прерывать цепь обеспечения безопасности лифтовой установки или управляющее напряжение устройства управления приводным механизмом, чтобы, таким образом, сразу же или после паузы замедления остановить лифт.
Предпочтительные варианты усовершенствования лифтовой системы в соответствии с изобретением определены посредством зависимых пунктов формулы изобретения.
В предпочтительном варианте осуществления изобретения устройство видеоконтроля за тормозной системой в соответствии с изобретением рассчитано таким образом, что может использоваться как в лифтовых установках, работающих на постоянном токе, так и в лифтовых установках, работающих на переменном токе.
Изобретение подробно описывается далее на основании примеров осуществления и со ссылкой на чертежи, на которых представлено:
фиг.1 - лифтовая установка с первым устройством видеоконтроля за тормозной системой в соответствии с изобретением, в сильно упрощенном схематичном изображении;
фиг.2 - детали второго устройства видеоконтроля за тормозной системой в соответствии с изобретением, в сильно упрощенном схематичном изображении;
фиг.3 - детали третьего устройства видеоконтроля за тормозной системой в соответствии с изобретением, в сильно упрощенном схематичном изображении;
фиг.4 - детали интерфейсного блока в соответствии с изобретением, который может быть частью устройства видеоконтроля за тормозной системой;
фиг.5 - детали другого интерфейсного блока в соответствии с изобретением, который может быть частью устройства видеоконтроля за тормозной системой;
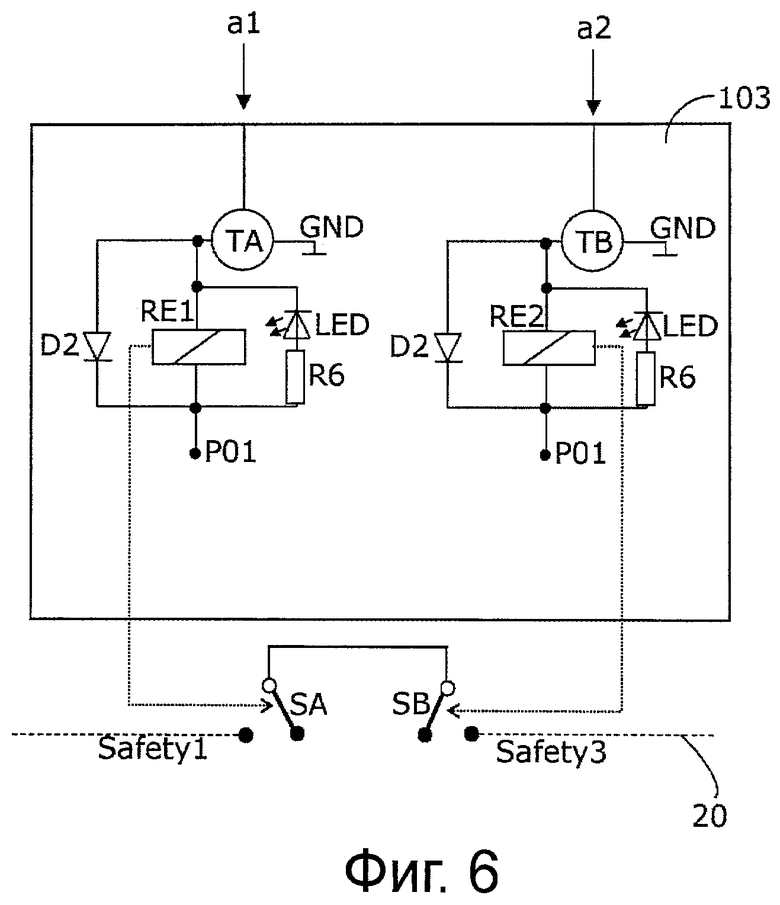
фиг.6 - детали релейной цепи в соответствии с изобретением, которая может быть частью устройства видеоконтроля за тормозной системой;
фиг.7 - блок-схема, демонстрирующая этапы способа в соответствии с изобретением;
фиг.8 - блок-схема, демонстрирующая этапы следующего способа в соответствии с изобретением;
Фиг.1 демонстрирует первый вариант осуществления изобретения. Представлена лифтовая установка 10 в предельно схематичном изображении. Лифтовая установка 10 включает в себя кабину 14 лифта, установленную с возможностью вертикального перемещения в шахте 15 лифта. Кабина 14 лифта может обслуживать несколько этажей (в данном случае показаны два этажа А и В). Кабина 14 лифта может приводиться в движение посредством приводного механизма 11, который, например, как показано на фиг.1, находится в верхней части шахты. Наряду с приводным механизмом 11 лифтовая установка 10 имеет присоединенное к приводному механизму 11 устройство 12 управления приводным механизмом и тормозную систему 13. Соединение между устройством 12 управления приводным механизмом и элементами лифтовой установки 10 не показано. Однако, как правило, устройство 12 управления приводным механизмом принимает сигналы. Эти сигналы преобразуются в параметры управления. Когда приводной механизм 11 приводит в движение кабину 14 лифта, тормозная система 13 отпускает (стопорный) тормоз (а). При достижении нужного этажа (например, этажа В на фиг.1) скорость приводного механизма 11 меняется на обратную и в работу вступает (стопорный) тормоз (а) тормозной системы 13, с целью фиксации или удержания кабины 14 лифта на нужной высоте.
Так как существующие лифтовые установки зачастую не предлагают никаких соответствующих систем контроля отпуска, которые могли бы быть использованы для контроля над функционированием (стопорного) тормоза(ов), то в действие вводится устройство 100 видеоконтроля за тормозной системой в соответствии с изобретением, имеющее первый вход KB для сигналов торможения, чтобы иметь возможность соединить устройство 100 видеоконтроля за тормозной системой с первым электрическим тормозным контактом К1 (не показан) тормозной системы 13 посредством провода 13.1 для сигналов торможения. Устройство 100 видеоконтроля за тормозной системой имеет далее вход AF для сигналов движения, чтобы иметь возможность соединить устройство 100 видеоконтроля за тормозной системой посредством провода 12.1 для сигналов движения с первым электрическим контактом для сигналов движения устройства 12 управления приводным механизмом.
Для того чтобы снабдить устройство 100 видеоконтроля за тормозной системой, по меньшей мере, одним рабочим напряжением VCC (см. фиг.4), имеется устройство 101 подачи напряжения. Устройство 101 подачи напряжения соединяется, по меньшей мере, с одним устройством подачи напряжения (например, V+ на фиг.1) лифтовой установки 10 и питается через соответствующее устройство подачи напряжения. Кроме того, устройство 100 видеоконтроля за тормозной системой включает в себя микропроцессор 102, а также релейную цепь 103. Эта релейная цепь 103 рассчитана таким образом, что может быть активирована посредством микропроцессора 102, чтобы посредством активирования релейной цепи 103 прерывать цепь 20 обеспечения безопасности лифтовой установки 10 или управляющее напряжение устройства 12 управления приводным механизмом. Цепь 20 обеспечения безопасности, которая, например, проходя через кабину 14 лифта и шахту 15 лифта, образует петлю, имеет несколько контактов 21, например, на дверцах шахты. На фиг.1 представлен возможный вариант осуществления цепи 20 обеспечения безопасности. Цепь 20 обеспечения безопасности включает в себя регулятор 22 напряжения и соединяется, по меньшей мере, с одним устройством подачи напряжения (V+на фиг.1) лифтовой установки 10 и питается через него. Напряжение, которое предоставляется регулятором 22 напряжения, прикладывается к реле RE обеспечения безопасности, в случае, если все контакты 21, а также реле RE1 замкнуты. В случае, если при нарушениях в работе лифтовой установки (например, за счет нарушения в работе тормозной системы 13, которое было обнаружено устройством 100 видеоконтроля за тормозной системой) цепь обеспечения безопасности прерывается, включается реле RE и посредством устройства 12 управления приводным механизмом останавливает лифт.
В этом месте следует заметить, что имеют место и другие различные типы конфигурации и проводки цепи обеспечения безопасности. Проводка зависит при этом, в основном, от того, применяются ли реле нормально разомкнутые (normally open) или нормально замкнутые (normally closed).
Цепь 20 обеспечения безопасности схематично представлена также и на фиг.2, 3 и 6.
Активирование релейной цепи 103 посредством микропроцессора 102 обозначено на фиг.1 при помощи сигнала а и пунктирной стрелки. Посредством активирования релейной цепи 103 лифт 10 может быть безопасно и надежно остановлен в случае, если устройство 100 видеоконтроля за тормозной системой обнаруживает неполадки.
В примере осуществления изобретения под устройством 100 видеоконтроля за тормозной системой понимается отдельный элемент или конструктивный блок, который может быть смонтирован/установлен позднее или дополнительно. Элемент или конструктивный блок снабжен крепежными средствами и имеет электрические контакты или штекеры, чтобы иметь возможность обеспечить соединение контактов (торможения и/или движения) тормозной системы 13 и устройства 12 управления приводным механизмом.
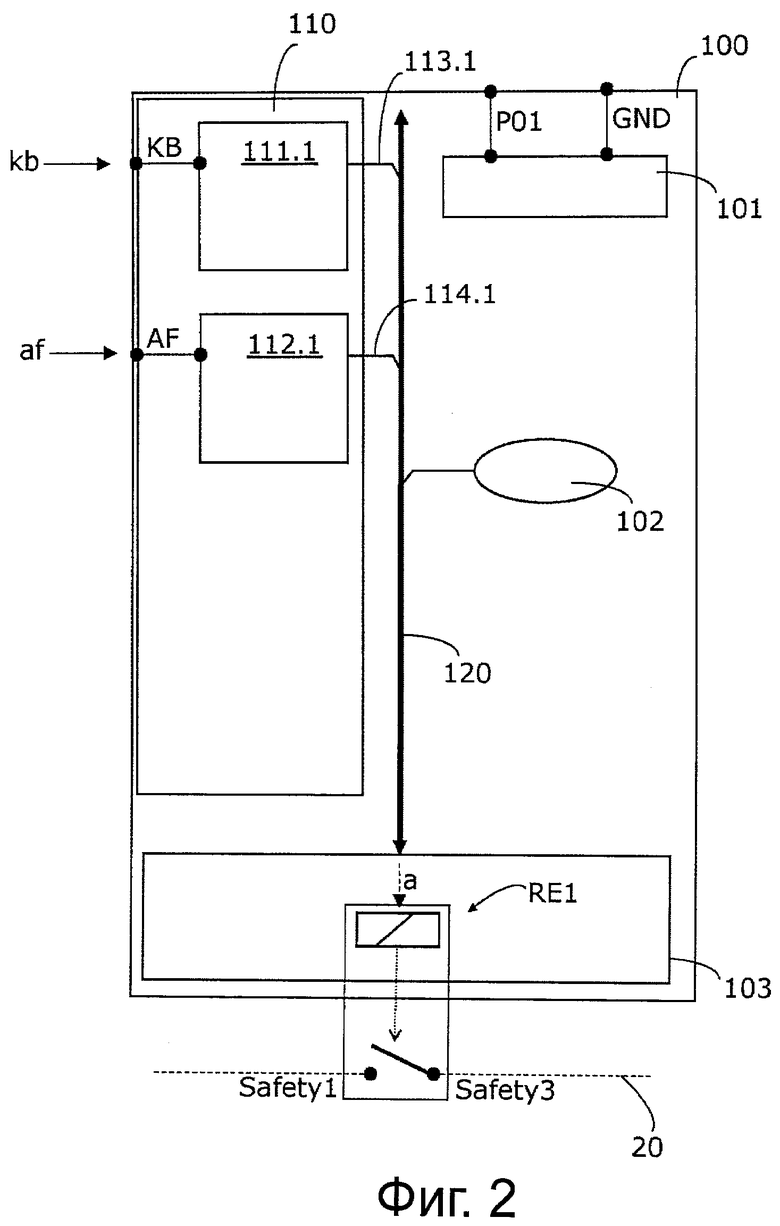
На фиг.2 представлены детали второго устройства 100 видеоконтроля за тормозной системой. Речь идет о схематичной блок-схеме, состоящей из важных элементов коммутационной схемы. Со стороны входа устройство 100 видеоконтроля за тормозной системой имеет соединительную ступень 110. Эта соединительная ступень 110 имеет два или более интерфейсных блока 111.1, 112.1. Интерфейсный блок 111.1 принимает от первого входа KB для сигнала торможения сигнал kb растормаживания. Этот сигнал kb растормаживания предпочтительно посредством схемы согласования напряжения, которая является частью интерфейсного блока 111.1, преобразуется в питающее напряжение (например, 5 В) устройства 100 видеоконтроля за тормозной системой. Интерфейсный блок 111.1 может включать в себя также дополнительную схему на диодах для фильтрования пиков напряжения сигнала kb растормаживания. Интерфейсный блок 111.1 может включать в себя также дополнительную схему на оптопарах, чтобы обеспечивать гальваническое разделение между первым входом KB для сигнала торможения и выходной стороной 113.1 интерфейсного блока 111.1.
Интерфейсный блок 112.1 принимает от первого входа AF для сигналов движения сигнал af движения. Этот сигнал af движения предпочтительно посредством схемы согласования напряжения, которая является частью интерфейсного блока 112.1, преобразуется в питающее напряжение (например, 5 В) устройства 100 видеоконтроля за тормозной системой. Интерфейсный блок 112.1 может включать в себя также дополнительный выпрямитель (как представлено, например, на фиг.5), чтобы преобразовывать сигнал af движения переменного напряжения в сигнал постоянного напряжения. Интерфейсный блок 112.1 может включать в себя также дополнительную схему на оптопарах, чтобы обеспечивать гальваническое разделение между первым входом AF для сигнала движения и выходной стороной 114.1 интерфейсного блока 112.1.
Выходные стороны 113.1, 114.1 интерфейсных блоков 111.1, 112.1 в предпочтительном варианте соединены с (входной/выходной) шинной системой 120 устройства 100 видеоконтроля за тормозной системой.
Устройство 100 видеоконтроля за тормозной системой включает в себя далее релейную цепь 103, которая рассчитана таким образом, что может активироваться посредством микропроцессора 102 (посредством сигнала а управления, который может передаваться через шинную систему 120), чтобы посредством активирования релейной цепи 103 прерывать цепь 20 обеспечения безопасности лифтовой установки 10 или управляющее напряжение устройства 12 управления приводным механизмом, чтобы, таким образом, сразу или после фазы замедления остановить лифт 10. Релейная цепь 103 включает в себя для этой цели, по меньшей мере, одно реле RE1, которое может включаться посредством сигнала а управления. В предпочтительном варианте реле RE1 со стороны выхода интегрировано в цепь 20 обеспечения безопасности лифтовой установки 10 или таким образом соединено с проводом для управляющего напряжения, что цепь 20 обеспечения безопасности оказывается замкнута лишь тогда (то есть лифтовая установка 10 функционирует), когда микропроцессор 102 не обнаруживает никаких ошибок (т.е. когда не прикладывается сигнал а управления) и когда все другие компоненты устройства 100 видеоконтроля за тормозной системой работают без ошибок. При возникновении ошибки в устройстве 100 видеоконтроля за тормозной системой или в случае, если микропроцессор 102 обнаруживает ошибку в тормозной системе 13, реле RE1 автоматически размыкается и режим движения лифта 10 прерывается. На фиг.2 реле RE1 показано в разомкнутом положении и цепь 20 обеспечения безопасности прервана посредством устройства 100 видеоконтроля за тормозной системой.
Особо предпочтительным является вариант осуществления изобретения, при котором в релейной цепи 103 используются два последовательно подключенных реле. Таким образом, повышается резерв, а, тем самым, и безопасность. Особо предпочтительными являются так называемые реле безопасности. Релейная цепь 103 включает в себя из расчета на каждое реле предпочтительно один переключательный транзистор, чтобы преобразовывать сигнал а управления (предпочтительно сигнал в зоне питающего напряжения в 5 В), который передается через тормозную систему 120, в сигнал переключения (предпочтительно сигнал в зоне питающего напряжения в 24 В) для реле.
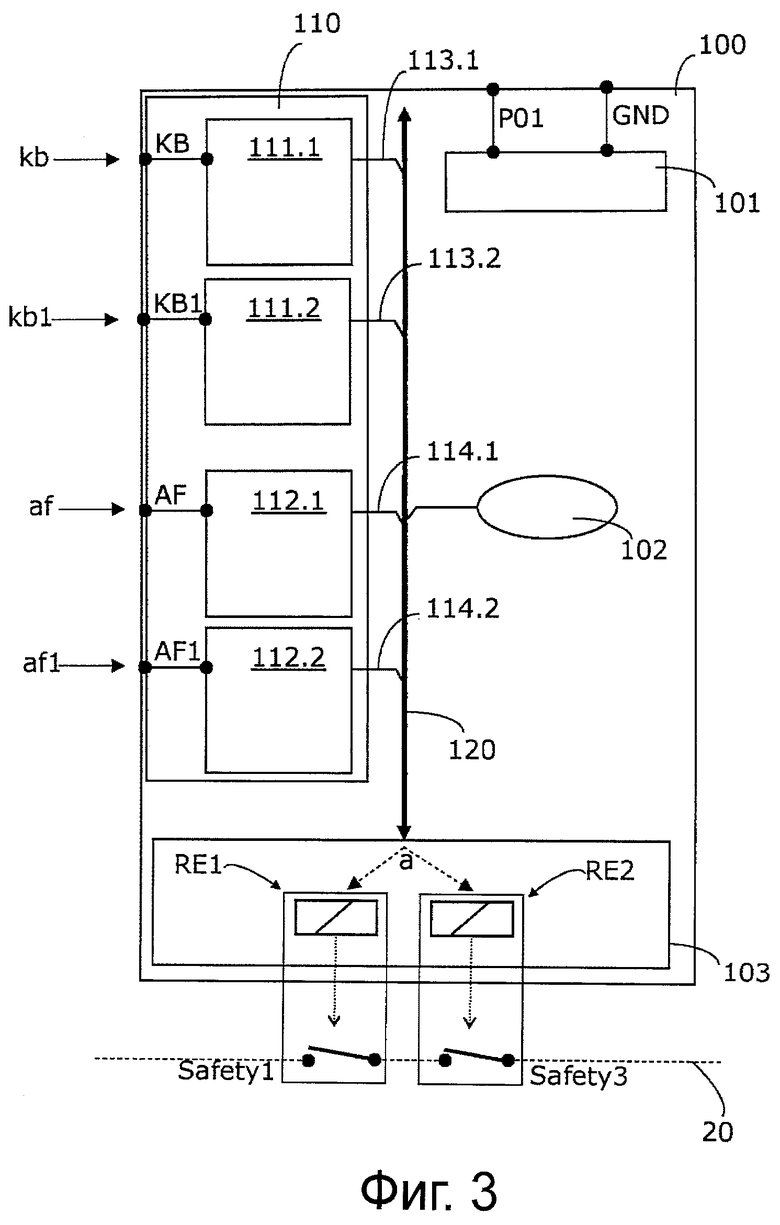
На фиг.3 представлены детали третьего устройства 100 видеоконтроля за тормозной системой. Речь идет о блок-схеме, состоящей из важных элементов коммутационной схемы. Со стороны входа устройство 100 видеоконтроля за тормозной системой имеет соединительную ступень 110. Эта соединительная ступень 110 имеет четыре или более интерфейсных блоков 111.1, 111.2, 112.1, 112.2. Интерфейсный блок 111.1 принимает от первого входа KB для сигнала торможения сигнал kb растормаживания. Этот сигнал kb растормаживания предпочтительно посредством схемы согласования напряжения, которая является частью интерфейсного блока 111.1, преобразуется в питающее напряжение (например, 5 В) устройства 100 видеоконтроля за тормозной системой. Интерфейсный блок 111.1 может включать в себя также дополнительную схему на диодах для фильтрования пиков напряжения сигнала kb растормаживания. Интерфейсный блок 111.1 может включать в себя также дополнительную схему на оптопарах, чтобы обеспечивать гальваническое разделение между первым входом КВ для сигналов торможения и выходной стороной 113.1 интерфейсного блока 111.1.
Интерфейсный блок 111.2 сконструирован в предпочтительном варианте таким же, как и интерфейсный блок 111.1, и принимает от второго входа КВ1 для сигналов торможения второй сигнал kbl растормаживания.
Интерфейсный блок 112.1 принимает от первого входа AF для сигналов движения сигнал af движения. Этот сигнал af движения предпочтительно посредством схемы согласования напряжения, которая является частью интерфейсного блока 112.1, преобразуется в питающее напряжение (например, 5 В) устройства 100 видеоконтроля за тормозной системой. Интерфейсный блок 112.1 может включать в себя также дополнительный выпрямитель, чтобы преобразовывать сигнал af движения переменного напряжения в сигнал постоянного напряжения. Интерфейсный блок 112.1 может включать в себя также дополнительную схему на оптопарах, чтобы обеспечивать гальваническое разделение между первым входом AF для сигналов движения и выходной стороной 114.1 интерфейсного блока 112.1.
Интерфейсный блок 112.2 сконструирован в предпочтительном варианте таким же, как и интерфейсный блок 112.1, и принимает от второго входа AF1 для сигналов движения второй сигнал af1 движения.
Выходные стороны 113.1, 113.2, 114.1, 114.2 интерфейсных блоков 111.1, 111.2, 112.1, 112.2 в предпочтительном варианте соединены с (входной/выходной) шинной системой 120 устройства 100 видеоконтроля за тормозной системой.
Устройство 100 видеоконтроля за тормозной системой включает в себя далее релейную цепь 103, которая рассчитана таким образом, что может активироваться посредством микропроцессора 102 (посредством сигнала а управления, который может передаваться через шинную систему 120), чтобы посредством активирования релейной цепи 103 прерывать цепь 20 обеспечения безопасности лифтовой установки 10 или управляющее напряжение устройства 12 управления приводным механизмом, чтобы, таким образом, сразу или после фазы замедления остановить лифт 10. Релейная цепь 103 включает в себя для этой цели предпочтительно два реле RE1, RE2, которые, например, могут включаться посредством общего сигнала а управления или посредством двух отдельных сигналов (а1 и а2 на фиг.6). В предпочтительном варианте реле RE1, RE2 со стороны выхода таким образом интегрированы в цепь 20 обеспечения безопасности лифтовой установки 10 или соединены с проводом для управляющего напряжения, что цепь 20 обеспечения безопасности оказывается замкнута лишь тогда (то есть лифтовая установка 10 функционирует), когда микропроцессор 102 не обнаруживает никаких ошибок (т.е. когда не прикладывается сигнал а управления или не прикладываются сигналы а1 и а2 управления) и когда все другие компоненты устройства 100 видеоконтроля за тормозной системой работают без ошибок. На фиг.3 выключатели обоих реле RE1 и RE2 изображены закрытыми. Это нормальное положение лифтовой установки, и кабина лифта 14 может перемещаться. При возникновении ошибки в устройстве 100 видеоконтроля за тормозной системой или в случае обнаружения микропроцессором 102 ошибки в тормозной системе 13, оба реле RE1 и RE2 автоматически размыкаются, и режим движения лифта 10 оказывается прерванным.
Особо предпочтительным является вариант осуществления изобретения, при котором в релейной цепи 103 используются два реле RE1 и RE2, переключатели которых подключены последовательно. Таким образом, повышается резерв, а, тем самым, и безопасность. Особо предпочтительными являются так называемые реле безопасности. Релейная цепь 103 включает в себя из расчета на каждое реле предпочтительно один переключательный транзистор, чтобы преобразовывать сигнал а управления (предпочтительно сигнал в зоне питающего напряжения в 5 В), который передается через шинную систему 120, в сигнал переключения (предпочтительно сигнал в зоне питающего напряжения в 24 В) для реле RE1 и RE2.
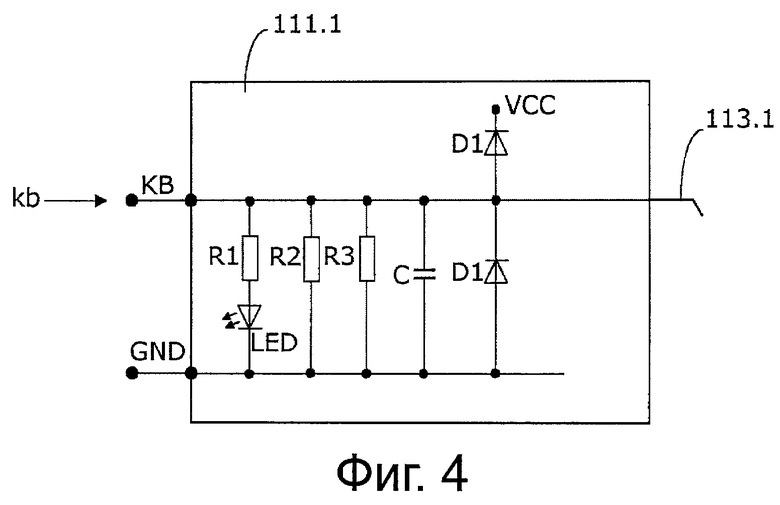
На фиг.4 представлены детали первого возможного интерфейсного блока 111.1, который, например, может использоваться в устройстве 100 видеоконтроля за тормозной системой в соответствии с изобретением. Речь идет о схематичном изображении блок-схемы, состоящей из важных элементов коммутационной схемы. Со стороны входа предусмотрен дополнительный светодиод (LED) с последовательным сопротивлением Rl. Светодиод (LED) светится тогда, когда прилагается сигнал kb растормаживания. Предусмотрена схема согласования напряжения из нескольких сопротивлений R2, R3, которая преобразовывает питающее напряжение (например, в 24 В) на контактах контролируемой тормозной системы 13 (соответственно, одного тормозного рычага тормозной системы 13) в питающее напряжение (например, в 5 В) устройства 100 видеоконтроля за тормозной системой. Схема согласования напряжения предпочтительно рассчитана таким образом, что, например, посредством перемещения мостов или переключения DIP-коммутаторов на микросхемах с двухрядным расположением выводов (DIP = Dual in-line package) может быть получено согласование напряжения, чтобы сотрудник, обслуживающий лифт, по месту мог самостоятельно произвести необходимые согласования. DIP-переключатели - это не те переключатели, которые обычно встроены в так называемые DIL-корпуса с двухрядным расположением выводов (DIL = dual in-line).
Интерфейсный блок 111.1 может включать в себя также дополнительную схему на диодах с диодами D1, как показано на фиг.4, для фильтрования пиков напряжения сигнала kb растормаживания. Интерфейсный блок 111.2 может быть сконструирован таким же образом.
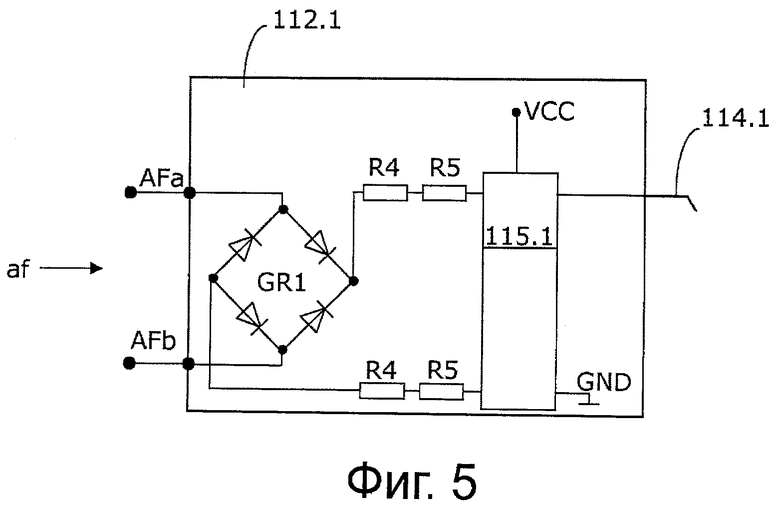
На фиг.5 представлены детали следующего возможного варианта интерфейсного блока 112.1, который может использоваться, например, в устройстве 100 видеоконтроля за тормозной системой в соответствии с изобретением. Речь идет о схематичном изображении блок-схемы, состоящей из важных элементов коммутационной схемы. Со стороны входа прилагается сигнал af переменного напряжения. Сигнал af переменного напряжения посредством выпрямителя GR1 преобразуется в сигнал постоянного напряжения. На стороне постоянного напряжения последовательно подключено сопротивление R4 или несколько сопротивлений R4, R5, для подведения сигнала постоянного напряжения к дополнительной оптопаре 115.1. На стороне выхода оптопара 115.1 выдает сигнал постоянного напряжения (предпочтительно в зоне питающего напряжения в 5 В), которое по соединению 114.1 направляется к шине 120. Интерфейсный блок 112.2 может быть сконструирован таким же образом.
На фиг.6 представлены детали следующего возможного варианта релейной цепи 103, которая может использоваться, например, в устройстве 100 видеоконтроля за тормозной системой в соответствии с изобретением. Речь идет о схематичном изображении блок-схемы, состоящей из важных элементов коммутационной схемы. Представленная релейная цепь 103 имеет два реле R1, R2 (предпочтительно реле обеспечения безопасности), переключатели которых подключены последовательно. Сигналы а1 и а2 управления, которые передаются от шины 120 на релейную цепь 103, усиливаются соответствующими транзисторами ТА или ТВ (предпочтительно используются MOS-FET транзисторы), чтобы включить соответствующие реле RE1 или RE2. Дополнительные светодиоды (LED) показывают, приложен ли к реле сигнал включения. Реле RE1 приводит в действие упрощенно изображенный переключатель SA, а реле RE2 включает упрощенно изображенный переключатель SB. В представленном положении включения нет никакого контакта между вводами Saftey1 и Saftey3. В этом исключительном случае цепь 20 обеспечения безопасности разомкнута, и лифт 10 стоит. В случае, если к обоим реле RE1 и RE2 не приложены сигналы а1 и а2 включения, то оба переключателя SA и SB переключаются и вводы Saftey1 и Saftey3 электропроводящим способом соединяются друг с другом. В этом случае цепь 20 обеспечения безопасности замкнута (в случае, если другие переключатели 21 цепи 20 обеспечения безопасности также закрыты), и лифт может двигаться.
Особо предпочтительной является релейная цепь 103, реле RE1, RE2 которой посылают сигналы статуса через шину 120 обратно на микропроцессор 102 (не показан). Таким образом, микропроцессор 102 может контролировать каждый процесс включения, что способствует дальнейшему повышению безопасности.
В качестве микропроцессора 102 в предпочтительном варианте используется 8-бит микропроцессор. Особенно подходит, например, ATMEGA88. Микропроцессор 102 может быть подключен и/или запрограммирован таким образом, что может выполнять все без исключения процессы и операции в соответствии с установленными ранее правилами.
За счет наличия микропроцессора 102 устройство 100 видеоконтроля за тормозной системой может связать статус одного или обоих тормозных контактов (К1 или К2) с информацией о движении (af и/или af1).
Устройство 100 видеоконтроля за тормозной системой может использоваться тогда, когда существующий приводной механизм 11, вновь вмонтированный приводной механизм 11, существующее устройство 12 управления приводным механизмом или вновь вмонтированное устройство 12 управления приводным механизмом не в состоянии контролировать (стопорный) тормоз(а) 13. Устройство 100 видеоконтроля за тормозной системой останавливает лифт 10, если были обнаружены неполадки в тормозном механизме. При этом, чтобы предотвратить ненужные отключения, должны быть предотвращены возможные неправильные распознавания проблем (распознавания ошибок), которые могут возникать, например, при соударении тормозных контактов.
Устройство 100 видеоконтроля за тормозной системой может проверить, размыкается ли тормоз тормозной системы 13. Устройство 100 видеоконтроля за тормозной системой не может определять, однако, замыкается ли тормоз. В соответствии с предпочтительным вариантом осуществления изобретения устройство 100 видеоконтроля за тормозной системой может, однако, на основании оценки ошибки сделать заключение том, имел ли место (электрический и/или механический) дефект контакта. Однако является ли данный дефект контакта дефектом тормозного механизма, который не замыкается (в плане тормозит), устройство 100 видеоконтроля за тормозной системой определить не может.
Устройство 100 видеоконтроля за тормозной системой оценивает, как описано выше, по меньшей мере, один тормозной контакт К1 посредством того, что обрабатывает соответствующий сигнал kb растормаживания. Особо предпочтительным является вариант осуществления изобретения, при котором оценка двух тормозных контактов К1 и К2 осуществляется посредством того, что обрабатываются соответствующие сигналы kb и kb1 растормаживания. В предпочтительном варианте устройство 100 видеоконтроля за тормозной системой выполнено с возможностью согласования с тормозными контактами К1, К2, которые нормально разомкнуты или нормально замкнуты. То есть предпочтительный вариант устройства 100 видеоконтроля за тормозной системой можно привести в согласование с полярностью тормозных контактов К1, К2 и/или с полярностью сигнала аf/движения или сигналов af, af1 движения.
Принимается и оценивается, по меньшей мере; один сигнал af движения, который показывает, перемещается ли приводной механизм 11. В предпочтительном варианте в данном случае принимается и оценивается второй сигнал af1 движения совместно с первым сигналом af движения, что представлено в последующей таблице 1.
Информационный сигнал AF_info представляет собой логическую операцию ИЛИ сигналов af, af1 движения. Если один из сигналов af или af1 движения показывает логическую 1, кабина 14 лифта находится в движении и информационный сигнал AF_info это 1. Когда ни один из сигналов af или af1 движения не является 1, тогда и информационный сигнал AF_info это 0. Если под сигналами af или af1 движения понимаются так называемые сигналы направления движения и af показывает, например, движение вверх, а af1 движение вниз (самая нижняя строка в вышеприведенной таблице), то может иметь место особый случай. Когда оба сигнала af или af1 направления движения являются логической единицей, то имеет место ошибка, так как очевидно, что кабина лифта не может одновременно двигаться в обоих направлениях. Эта ошибка обозначена в таблице как 1*.
Сигналы движения или сигналы af или af1 направления движения могут быть сигналами постоянного напряжения или сигналами переменного напряжения, значения которых в предпочтительном варианте могут находиться между значениями 24 В постоянного напряжения и 230 В переменного напряжения. Устройство 100 видеоконтроля за тормозной системой в предпочтительном варианте рассчитано соответствующим образом.
Когда оценка/сравнение сигналов kb и af или kb, kb1 и af, а также af1 выявляет, что имеет место проблема, лифт 10 останавливается. В предпочтительном варианте расчет осуществляется таким образом, что лифт 10 заканчивает движение, прежде чем будет заблокирован.
Чтобы предотвратить ложный запуск, в качестве составной части устройства 100 видеоконтроля за тормозной системой предпочтительно используются накопители ошибок или счетчики ошибок. Использование накопителей ошибок и/или счетчиков ошибок приводит к тому, что не каждая распознанная ошибка приводит непосредственно к остановке лифта 10. При этом при определенных обстоятельствах, приходится мириться с тем, что участок пути проходится с «затянутым» (стопорным) тормозом. Такая езда с «затянутым» (стопорным) тормозом не является проблемой, так как срабатывание не слишком велико.
Следующая таблица 2 демонстрирует различные сигналы и толкование накопителя ошибок и/или счетчика ошибок предпочтительного варианта осуществления изобретения.
Действие 1: в случае, если ошибка В действительна для более чем tA=3 с (т.е. в случае, если В=1), то счетчик С1 считает три ошибки для трех последовательных проходов, а следующий счетчик С3 используется, чтобы сосчитать, по меньшей мере, пять ошибок в течение пяти минут (=300 с). В случае, если ошибка В действительна для менее чем tA=3 с, то речь идет о типичной ситуации, когда тормоза были отпущены специально сначала с небольшим замедлением после пуска кабины 14 лифта (временное состояние при пуске/останове).
Дополнительно запускается 60-секундный ограничитель Т1 продолжительности хода в случае, если ошибка В действительна для более чем tA=3 с. Реле RE1/RE2 размыкаются через 2 с после того, как af меняется с 1 на 0, в случае, если счетчик С1>2 или в случае, если С3 после 5 мин >4. Реле RE1/RE2 размыкаются сразу же в случае, если ограничитель Т1 продолжительности хода в течение 60 с не был переведен в обратное положение (например, посредством переключателя установки в первоначальное положение). Посредством ограничителя Т1 продолжительности хода устанавливается максимальная продолжительность хода в случае ошибки. При превышении этого максимального значения продолжительности хода лифт останавливается.
Действие 2: в случае, если А действительна для более чем 2 с (т.е. в случае, если А=1), то используется счетчик С2, чтобы сосчитать три ошибки для трех последовательных проходов. Реле RE1/RE2 размыкаются сразу же в случае, если счетчик С1>2.
В качестве ограничителей продолжительности хода предпочтительно используются датчики времени (таймер) или датчики тактовых импульсов.
Соответствующие проходы предпочтительно контролируются посредством микропроцессора 102. Соответствующий набор команд или действий по регулировке регламентирует отдельные шаги, и задаются параметры (например, количество разрешенных ошибок, продолжительность временного окна tA (например, 3 с), максимальное время (например, 60 с), которое использует ограничитель Т1 продолжительности хода, и проч.). Тем самым, микропроцессор 102 может отрабатывать набор команд или действий по регулировке и в зависимости от ситуации реагировать в желаемой форме.
При действии 1, например, микропроцессор 102 проверяет, действительна ли ошибка В для более чем tA=3c. Если этот случай имеет место, то счетчик С1, реализованный в микропроцессоре 102, считает три ошибки для трех последовательных проходов. Микропроцессор 102 использует следующий счетчик С3 совместно с ограничителем Т3 продолжительности хода, чтобы сосчитать, по меньшей мере, пять ошибок в течение пяти минут. Аналогичным образом могут отрабатываться также и другие действия по регулировке.
В альтернативном варианте осуществления изобретения к микропроцессору 102 подсоединяются отдельные накопители ошибок и/или счетчики ошибок (в качестве аппаратных частей), чтобы принимать на себя возникающие по ходу задачи.
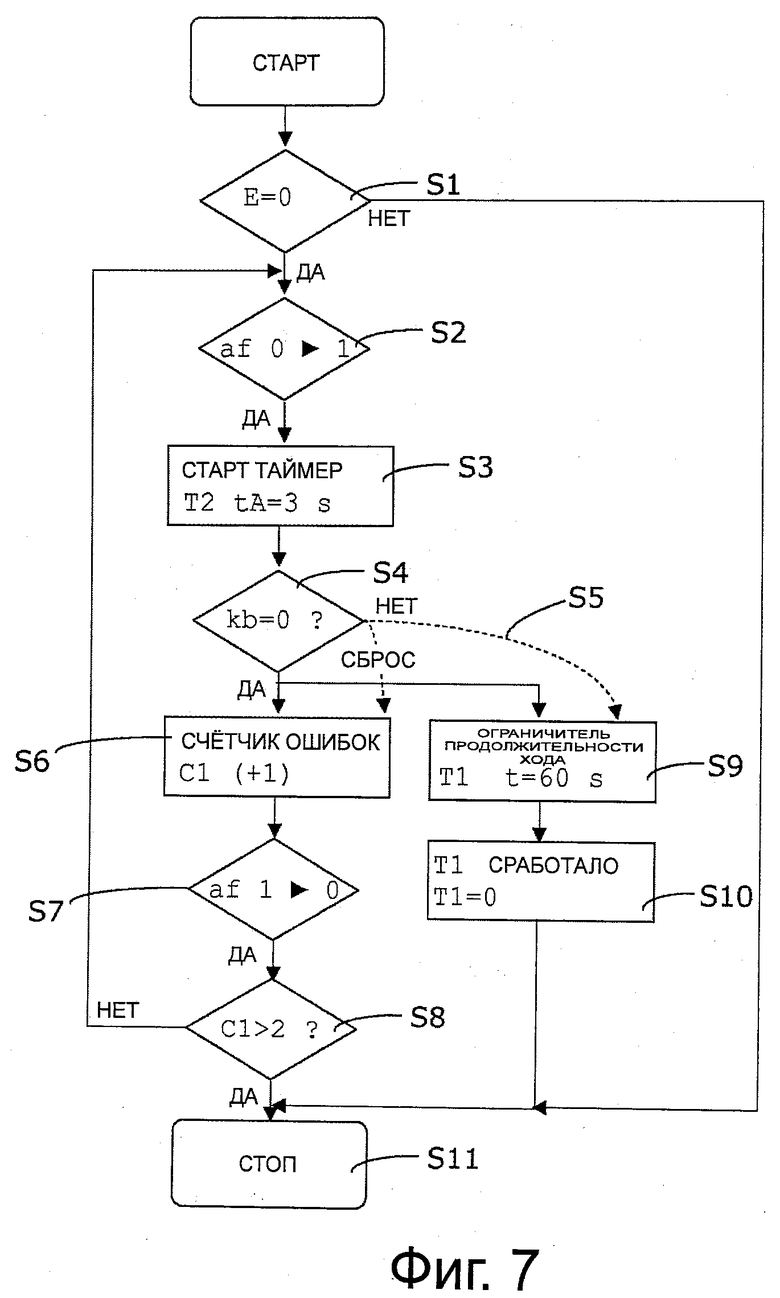
Способ в соответствии с изобретением для контроля тормозной системы 13 отличается наличием следующих этапов, представленных на схематичной блок-схеме согласно фиг.7. Во время контроля за тормозной системой 13 принимаются первый сигнал kb растормаживания тормозной системы 13 и первый сигнал af движения устройства 12 управления приводным механизмом (этапы S2 и S4). Затем осуществляется контроль того, следует ли за приложением первого сигнала af движения (т.е. сигнал af движения переходит от 0 к 1; этап S2) первый сигнал kb растормаживания (этап S4). Такой сигнал kb растормаживания появляется тогда, когда тормоз тормозной системы 13 был отпущен. В случае, если этот сигнал kb растормаживания возникает не в пределах временного окна tA (этап S3), то активируется релейная цепь 103 (этап S11), чтобы прервать цепь 20 обеспечения безопасности лифтовой установки 10 или управляющее напряжение устройства 12 управления приводным механизмом. Посредством этого лифт 10 останавливается.
Изображенная на фиг.7 блок-схема представляет собой упрощенный вариант реализации изобретения. После того как устройство 100 видеоконтроля за тормозной системой было запущено и подключено, запрашивают, сохранил ли накопитель Е долговременных сбоев (этап S1) ошибку в памяти. В случае если Е=0, то не имеется никакой долговременной ошибки. В противном случае, лифт может быть остановлен (этап S11). В случае если не имеется никакой долговременной ошибки, проверяют, переходит ли сигнал af движения с 0 на 1 (этап S2). В случае положительного ответа запускается датчик Т2 времени (этап S3), который задает временное окно, например, tA=3 с. Если в течение этих 3 с не последует никакого сигнала kb растормаживания (этап S4), то есть, если kb=0 остается неизменным, то имеет место первая ошибка, которая сохраняется в памяти счетчика С1 ошибок. Этот счетчик С1 ошибок стартует с нуля и повышается на одном этапе до (+1). В случае, если сигнал af движения переходит с 1 на 0 (т.е. в случае, если кабина лифта останавливается; этап S7), то проверяют, не сохранено ли в памяти счетчика С1 ошибок более двух ошибок (этап S8).B случае, если действительно имеется более двух ошибок, лифт 10 останавливается (этап 11). Однако если имеется менее двух ошибок, способ возвращается к точке перед началом этапа S2.
Параллельно с подсчетом ошибок посредством счетчика С1 ошибок используется ограничитель Т1 продолжительности хода, который отсчитывает время от нуля, например, до 60 с. В случае если ограничитель Т1 продолжительности хода сработал, т.е. в случае, если 60 с превышены (этап S10), а тормоз все еще не отпущен, что можно определить по сигналу растормаживания kb=0, лифт 10 останавливается (этап S11).
В случае если сигнал растормаживания kb=1, то это означает, что тормоз был отпущен. В этом случае счетчик С1 ошибок и ограничитель Т1 продолжительности хода выставляются обратно на ноль, что показано посредством обозначенных позицией S5, пунктирных стрелок и надписью «Reset» («сброс»).
При остановке лифта, долговременная ошибка, например, может сохраняться в памяти накопителя Е долговременных сбоев, для предотвращения возобновления движения лифта посредством простого включения или выключения. В случае, если Е=1, т.е. в случае если имеется долговременная ошибка, способ в соответствии с фиг.7 сразу же переходит с этапа S1 в конец (этап S11).
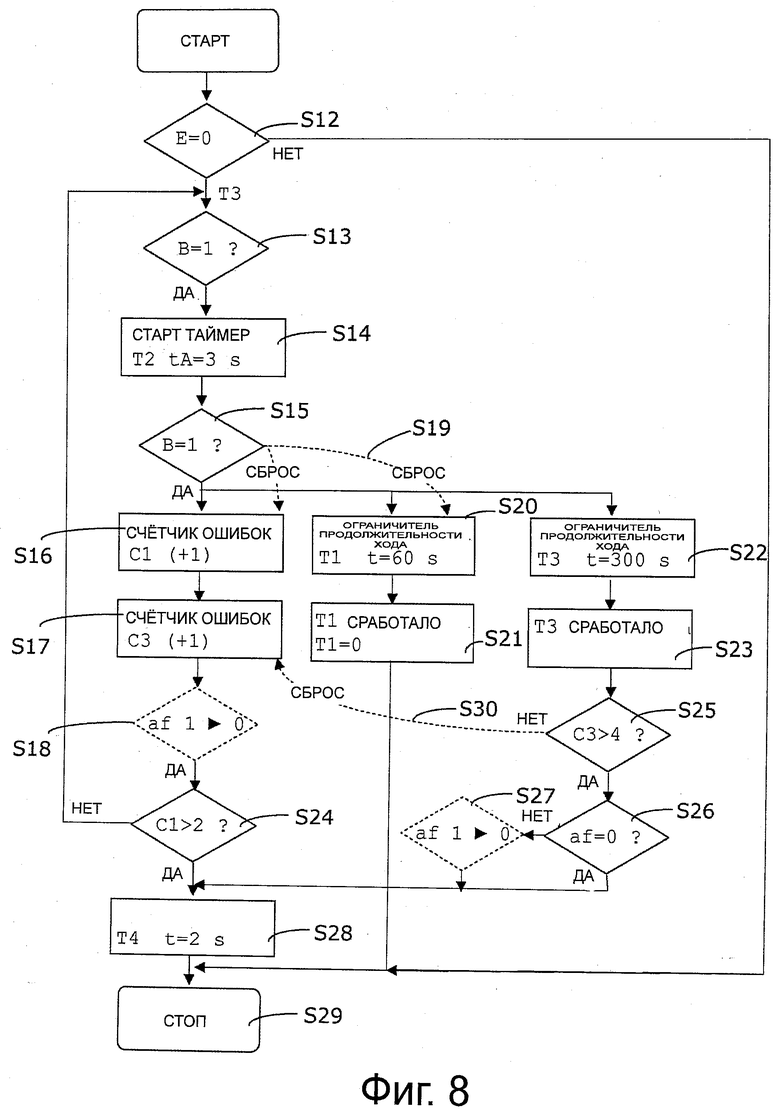
Изображенная на фиг.8 блок-схема представляет собой предпочтительный вариант осуществления изобретения. После того, как устройство 100 видеоконтроля за тормозной системой было запущено или подключено, запрашивают, сохранил ли накопитель Е долговременных сбоев в памяти ошибку (этап S12). В случае если Е=0, то не имеется никакой долговременной ошибки. В противном случае, лифт может быть остановлен (этап S29). В случае если не имеется никакой долговременной ошибки, проверяют, действительно ли, что В=1 (этап S13). Сигнал В выявляется на основании таблицы 2. В случае положительного ответа запускается датчик Т2 времени (этап S14), который задает временное окно, например, tA=3 с. Если в течение этих 3 с сигнал В=1 останется неизменным (этап S15), то имеет место первая ошибка, которая сохраняется в памяти счетчика С1 ошибок. Этот счетчик С1 ошибок стартует с нуля и повышается на одном этапе до (+1). В случае, если сигнал af движения переходит с 1 на 0 (т.е. в случае, если кабина лифта останавливается; этап S18), проверяют, не сохранено ли в памяти счетчика С1 ошибок более двух ошибок (этап S24). В случае, если действительно имеется более двух ошибок, лифт 10 останавливается (этап S29). Однако, в случае, если имеется менее двух ошибок, способ возвращается обратно к точке перед началом этапа S13. Вместо проверки сигнала af движения на этапе S18, в данном случае в качестве альтернативы можно проверить также информационный сигнал AF_info.
Параллельно с подсчетом ошибок посредством счетчика С1 ошибок, по аналогии с фиг.7, используется ограничитель Т1 продолжительности хода, который отсчитывает время от нуля, например, до 60 с. В случае, если ограничитель Т1 продолжительности хода сработал, т.е. в случае, если 60 с истекли (этап S21), а тормоз все еще не отпущен, что можно определить по сигналу растормаживания kb=0 (или по сигналу ошибки В=1), то лифт 10 останавливается (этап S29).
В случае, если сигнал растормаживания kb=1, то это означает, что тормоз отпущен. В этом случае счетчик С1 ошибок и ограничитель Т1 продолжительности хода выставляются обратно на ноль, что показано посредством обозначенных позицией S19, пунктирных стрелок и надписью «Reset» («сброс»).
Параллельно с подсчетом ошибок посредством счетчика С1 ошибок, может использоваться другой ограничитель Т3 продолжительности хода, который отсчитывает время от нуля, например, до 300 с (=5 минутам). Далее используется счетчик С3 ошибок, который стартует с нуля и за один этап повышается до (+1). Если по истечении 300 с (этап S23) в счетчике С3 ошибок имеется более четырех ошибок (этап S25), то проверяют, действительно ли сигнал движения af=0 (этап S26). В этом случае лифт 10 останавливается (этап S29), причем перед остановкой используется другой ограничитель Т4 продолжительности хода, с t=2 с (этап S28). Под 2 с понимается время ожидания, которое необходимо для того, чтобы открыть двери, прежде чем лифт 10 будет затем остановлен. В случае, если сигнал движения af=1, то выжидают пока сигнал af движения не изменится с 1 на 0 (этап S28), прежде чем затем будет использован ограничитель Т4 продолжительности хода. В случае, если на этапе S25 С3 не более 4, то счетчик С3 ошибок выставляется обратно на ноль (этап S30).
Дополнительно может быть подвергнут оценке и обработан сигнал А ошибки (см. таблицу 2). Посредством следующего ограничителя Т5 продолжительности хода (не представлен), может быть введено, в случае, если А=1, небольшое время ожидания, например, 2с. В случае если по истечении 2 с, все еще имеет место 1, то следующий счетчик С2 ошибок может быть поднят на 1. Если содержимое памяти счетчика С2 больше 2, то лифт 10 может быть остановлен (этап S29).
Тормозная система 13 может иметь два тормозных рычага, которые независимо друг от друга открываются (т.е. отпускают тормозную колодку тормозного механизма) и закрываются. У тормозной системы 13 с независимыми тормозными рычагами на каждый тормозной рычаг приходится один тормозной магнит, одна пружина и один контрольный переключатель. Другие тормозные системы 13 имеют два тормозных рычага, которые, однако, зависимы друг от друга. В этом случае используются один тормозной магнит, одна пружина и один контрольный переключатель.
Каждый тормозной рычаг в предпочтительном варианте присоединен к тормозному контакту К1 или К2. В предпочтительном варианте первый электрический тормозной контакт К1 тормозной системы 13 электрически соединен с первым переключателем тормозных контактов тормозной системы 13, а второй электрический тормозной контакт К2 тормозной системы 13 с вторым переключателем тормозных контактов тормозной системы 13. Каждый из переключателей тормозных контактов передает сигнал (kb или kb1) растормаживания, когда первый или, соответственно, второй тормозной рычаг тормозной системы 13 открывается или отпускается.
В соответствии с изобретением, как уже упоминалось ранее, речь идет, в частности, о дооборудовании или модернизации существующей лифтовой установки 10, имеющей приводной механизм 11, предназначенное приводному механизму 11 устройство 12 управления приводным механизмом и тормозную систему 13. Дооснащение или модернизация осуществляется обычно следующим образом. На этапе способа отдельное устройство 100 видеоконтроля за тормозной системой, в соответствии с одним или несколькими описанными ранее вариантами осуществления изобретения, встраивается в существующую лифтовую установку 10. После или во время встраивания первый вход КВ для сигналов торможения устройства 100 видеоконтроля за тормозной системой соединяется с первым электрическим тормозным контактом К1 тормозной системы 13. Аналогичным образом вход AF для сигналов движения устройства 100 видеоконтроля за тормозной системой через провод 12.1 соединяется с первым электрическим контактом сигнала движения устройства 12 управления приводным механизмом. Кроме того, присоединяется устройство 101 подачи напряжения, чтобы обеспечить устройство 100 видеоконтроля за тормозной системой, по меньшей мере, одним рабочим напряжением VCC. Релейная цепь 103 устройства 100 видеоконтроля за тормозной системой интегрируется в цепь 20 обеспечения безопасности лифтовой установки или соединяется с управляющим напряжением устройства 12 управления приводным механизмом.
В предпочтительном варианте устройство 100 видеоконтроля за тормозной системой имеет переключатель установки в первоначальное положение, который приводится в действие после встраивания отдельного устройства 100 видеоконтроля за тормозной системой или после устранения помех в работе лифтовой установки 10. Посредством приведения в действие переключателя установки в первоначальное положение устройство 100 видеоконтроля за тормозной системой переводится в определенное исходное положение. При этом, например, накопители или счетчики C1, C2, С3 ошибок переводятся в исходное положение (инициализируются).
При встраивании может быть также изменена конфигурация устройства 100 видеоконтроля за тормозной системой посредством произведения различного рода настроек (например, задания параметров, регулировки переключателей, перестановки мостов или DIP-переключателей и проч.). Устройство 100 видеоконтроля за тормозной системой может быть также рассчитано с возможностью перерабатывать импульсный сигнал (например, импульсный сигнал импульсного тахометра для контроля числа оборотов двигателя). В этом случае устройство 100 видеоконтроля за тормозной системой может быть оснащено, например, соответствующей, расположенной на входе, схемой согласования.
Устройство 100 видеоконтроля за тормозной системой может использоваться как в канатных приводных механизмах 11, так и в ременных приводных механизмах 11.
| название | год | авторы | номер документа |
|---|---|---|---|
| Система управления грузопассажирским лифтом | 2022 |
|
RU2791781C1 |
| СПАСАТЕЛЬНАЯ ЛИФТОВАЯ СИСТЕМА | 2009 |
|
RU2500604C2 |
| СИСТЕМА ЗАЩИТЫ ЛИФТА ОТ ПРЕВЫШЕНИЯ УСКОРЕНИЯ И ПРЕВЫШЕНИЯ СКОРОСТИ | 2009 |
|
RU2491224C2 |
| СПОСОБ И СИСТЕМА ДЛЯ УПРАВЛЕНИЯ АВАРИЙНЫМ ТОРМОЖЕНИЕМ ДЛЯ ПРИВОДНОЙ СИСТЕМЫ | 2018 |
|
RU2771711C2 |
| СИСТЕМА ОБНАРУЖЕНИЯ И ОБРАБОТКИ ПРЕВЫШЕНИЯ УСКОРЕНИЯ И ПРЕВЫШЕНИЯ СКОРОСТИ | 2009 |
|
RU2487074C2 |
| ЛИФТОВАЯ УСТАНОВКА, СОДЕРЖАЩАЯ КАБИНУ И ПРОТИВОВЕС | 2011 |
|
RU2583829C2 |
| УСТРОЙСТВО КОНТРОЛЯ ДЛЯ ЛИФТОВОЙ УСТАНОВКИ | 2016 |
|
RU2717604C2 |
| СПОСОБ УПРАВЛЕНИЯ ЛИФТОВОЙ УСТАНОВКОЙ | 2010 |
|
RU2520637C2 |
| Способ управления лифтового электропривода | 2020 |
|
RU2789908C2 |
| СПОСОБ И СИСТЕМА ДЛЯ МОДЕРНИЗАЦИИ ЛИФТОВОЙ УСТАНОВКИ | 2009 |
|
RU2502662C2 |
Изобретение относится к области устройств для обеспечения безопасности работы лифтовых установок. Лифтовая установка (10) содержит тормозную систему (13), приводной механизм (11), устройство (12) управления тормозным механизмом (11). При осуществлении контроля тормозной системы (13) принимают первый сигнал (kb) растормаживания тормозной системы (13). Принимают первый сигнал (af) движения лифта (10). Осуществляют контроль за тем, прилагается ли после приложения первого сигнала (af) движения первый сигнал (kb) растормаживания, причем этот сигнал (kb) растормаживания появляется тогда, когда тормоз тормозной системы (13) был отпущен. Если сигнал (kb) растормаживания принимают не в пределах временного окна (tA), активируют релейную цепь (103) для прерывания цепи (20) обеспечения безопасности лифтовой установки (10) или управляющего напряжения устройства (12) управления приводным механизмом для остановки лифта (10). Достигается повышение безопасности. 3 н. и 12 з.п. ф-лы, 8 ил.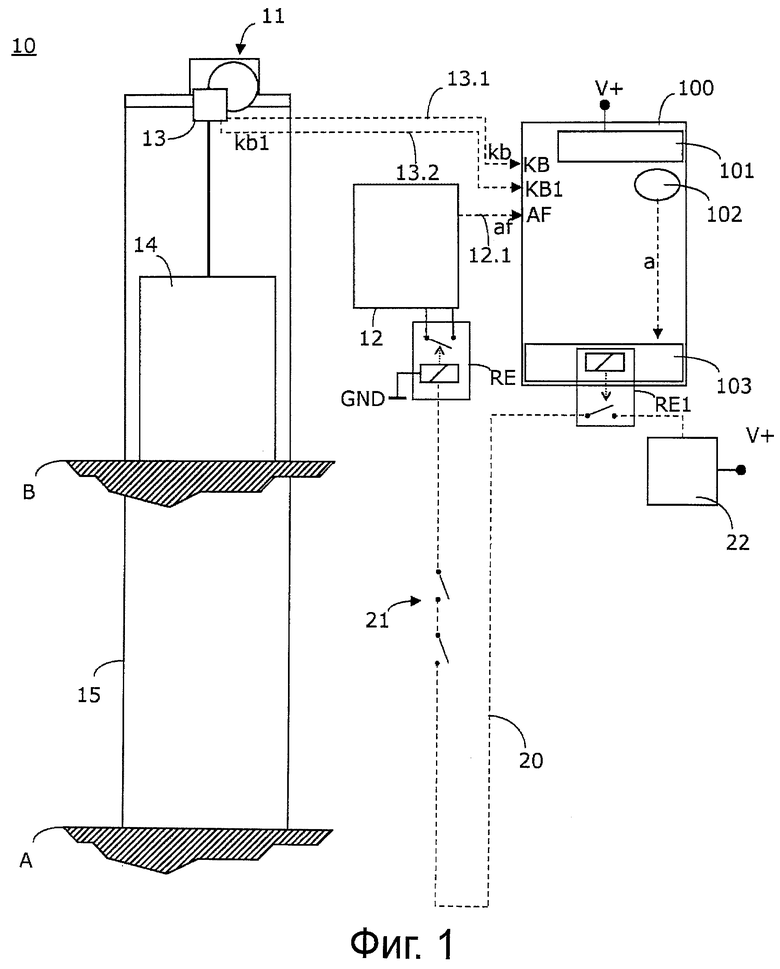
1. Способ контроля тормозной системы (13) лифтовой установки (10), которая дополнительно к тормозной системе (13) имеет приводной механизм (11) и устройство (12) управления приводным механизмом, причем осуществляют следующие этапы способа:
прием первого сигнала (kb) растормаживания тормозной системы (13),
прием первого сигнала (af) движения лифта (10),
контроль за тем, прилагается ли после приложения первого сигнала (af) движения первый сигнал (kb) растормаживания, причем этот сигнал (kb) растормаживания появляется тогда, когда тормоз тормозной системы (13) был отпущен,
в случае, если этот сигнал (kb) растормаживания принимается не в пределах временного окна (tA), тогда имеет место
активирование релейной цепи (103) для прерывания цепи (20) обеспечения безопасности лифтовой установки (10) или управляющего напряжения устройства (12) управления приводным механизмом для остановки лифта (10).
2. Способ по п.1, отличающийся тем, что принимают второй сигнал (kb1) растормаживания тормозной системы (13).
3. Способ по п.2, отличающийся тем, что на этапе контроля проверяют, был ли принят первый сигнал (kb) растормаживания и/или второй сигнал (kb1) растормаживания.
4. Способ по одному из пп.1-3, отличающийся тем, что задают временное окно (tA) и, что, по меньшей мере, один сигнал (kb, kb1) растормаживания в пределах временного окна (tA) принимают после приема сигнала (af) движения, причем производят активирование релейной цепи (103), если в пределах временного окна (tA) не принят никакой сигнал (kb, kb1) растормаживания.
5. Способ по одному из пп.1-3, отличающийся тем, что сигнал (af) движения либо является сигналом (af) направления движения, который подают от устройства (12) управления приводным механизмом, либо сигнал (af) движения является командой растормаживания, которую подают от устройства (12) управления приводным механизмом.
6. Способ по одному из пп.1-3, отличающийся тем, что первый электрический тормозной контакт (К1) тормозной системы (13) электрически соединен с первым переключателем тормозного контакта тормозной системы (13), а второй электрический тормозной контакт (К2) тормозной системы (13) электрически соединен со вторым переключателем тормозного контакта тормозной системы (13), причем посредством каждого из переключателей тормозных контактов передают сигнал (kb, kb1) растормаживания, если первый или соответственно второй тормозной рычаг тормозной системы (13) открывается или отпускается.
7. Способ по одному из пп.1-3, отличающийся тем, что первый сигнал (af) движения связывают со вторым сигналом (af1) движения посредством логической операции ИЛИ, чтобы вырабатывать информационный сигнал (AF-info), как только, по меньшей мере, один сигнал (af, af1) движения покажет логическую Единицу.
8. Способ по п.1, отличающийся тем, что используют накопитель ошибок или счетчик ошибок (C1, C2, С3) для возможности определения многократного возникновения ошибки, причем активирование релейной цепи (103) осуществляют лишь тогда, когда ошибка возникает многократно.
9. Способ по п.1, отличающийся тем, что запускают ограничитель (Т1) продолжительности хода в случае, если сигнал (kb) растормаживания действителен для более, чем tA=3c, причем посредством ограничителя (Т1) продолжительности хода устанавливают максимальную продолжительность хода в случае ошибки.
10. Устройство (100) видеоконтроля за тормозной системой (13) лифтовой установки (10), которая дополнительно к тормозной системе (13) имеет приводной механизм (11) и устройство (12) управления приводным механизмом, отличающееся тем, что устройство (100) видеоконтроля за тормозной системой включает в себя:
первый вход (KB) для сигнала торможения, чтобы электрически соединять устройство (100) видеоконтроля за тормозной системой с первым тормозным контактом (К1) тормозной системы (13),
вход (AF) для сигнала движения, чтобы соединять устройство (100) видеоконтроля за тормозной системой с проводом (12.1) для сигналов движения лифтовой установки (10),
устройство (101) подачи напряжения, чтобы обеспечить устройство (100) видеоконтроля за тормозной системой, по меньшей мере, одним рабочим напряжением (VCC),
микропроцессор (102),
релейную цепь (103), которая проведена и выполнена с возможностью активирования посредством микропроцессора (102), чтобы посредством активирования релейной цепи (103) прерывать цепь (20) обеспечения безопасности лифтовой установки (10) или управляющее напряжение устройства (12) управления приводным механизмом, чтобы, таким образом, останавливать лифт (10),
а также таймер (Т2), который соединен с входом (AF) для сигнала движения и с первым входом (KB) для сигнала торможения таким образом, что после приложения сигнала (af) движения запускается временное окно (tA) и в случае, если в пределах временного окна (tA) не прикладывается сигнал (kb) растормаживания, микропроцессор (102), а, вследствие этого, и релейная цепь (103), могут быть активированы.
11. Устройство (100) по п.10, отличающееся тем, что устройство (100) видеоконтроля за тормозной системой имеет второй вход (КВ1) для сигнала торможения, чтобы соединять устройство (100) видеоконтроля за тормозной системой с вторым электрическим тормозным контактом (К2) тормозной системы (13).
12. Устройство (100) по п.10 или 11, отличающееся тем, что устройство (100) видеоконтроля за тормозной системой, управляемое микропроцессором (102), выполнено с возможностью проверять, прилагается ли после приложения первого сигнала (af) движения на входе (AF) для сигнала движения, по меньшей мере, на одном из входов (KB, КВ1) для сигналов торможения сигнал (kb, kb1) растормаживания, причем этот сигнал (kb, kb1) растормаживания возникает тогда, когда тормозная система (13) и соответственно тормоз тормозной системы (13) был отпущен.
13. Устройство (100) по п.12, отличающееся тем, что устройство (100) видеоконтроля за тормозной системой ожидает сигнала (kb, kb1) растормаживания в пределах заданного временного окна (tA) после входа сигнала (af) движения на первом входе (AF) для сигнала движения, причем активирование релейной цепи (103) происходит тогда, когда либо не прикладывается никакого сигнала (kb, kb1) растормаживания, либо, когда не прикладывается никакого сигнала (kb, kb1) растормаживания в пределах временного окна (tA).
14. Устройство (100) по п.13, отличающееся тем, что вход (AF) для сигнала движения устройства (100) видеоконтроля за тормозной системой соединен с первым электрическим проводом (12.1) для сигналов движения, а второй вход (AF1) для сигнала движения соединен с вторым электрическим проводом (12.2) для сигналов движения устройства (12) управления приводным механизмом, причем устройство (100) видеоконтроля за тормозной системой связывает первый сигнал (af) направления движения первого электрического провода (12.1) для сигналов движения с вторым сигналом (af1) направления движения второго электрического провода (12.2) для сигналов движения посредством логической операции ИЛИ, чтобы вырабатывать информационный сигнал (AF-info), как только, по меньшей мере, один из электрических проводов (12.1, 12.2) для сигналов движения покажет логическую единицу в качестве сигнала (af, af1) движения.
15. Способ дооснащения или модернизации существующей лифтовой установки (10), со следующими этапами:
встраивание отдельного устройства (100) видеоконтроля по одному или нескольким предыдущим пп.12-14 за тормозной системой в существующую лифтовую установку (10),
соединение первого входа (KB) для сигналов торможения устройства (100) видеоконтроля за тормозной системой с первым электрическим тормозным контактом (К1) тормозной системы (13),
соединение входа (AF) для сигналов движения устройства (100) видеоконтроля за тормозной системой с первым электрическим проводом (12.1) для сигналов движения устройства (12) управления приводным механизмом,
подсоединение устройства (101) подачи напряжения, чтобы обеспечить устройство (100) видеоконтроля за тормозной системой, по меньшей мере, одним рабочим напряжением (VCC),
соединение релейной цепи (103) устройства (100) видеоконтроля за тормозной системой с цепью (20) обеспечения безопасности лифтовой установки или с управляющим напряжением устройства (12) управления приводным механизмом.
| Способ контроля внутренних напряжений в полупроводниковых кристаллах | 1973 |
|
SU502282A1 |
| DE 29921230 U1, 24.02.2000. | |||

