Предлагаемое техническое решение относится к радиоавтоматике и может быть использовано в телевизионных системах измерения параметров траекторий объектов сопровождения и других следящих системах, в которых информация о непосредственно измеряемых координатах формируется с помощью соответствующих дискриминаторов.
Известна цифровая следящая система - дискретный фильтр Калмана [1, Коновалов Г.Ф. Радиоавтоматика: Учеб. Для вузов по спец. «Радиотехника». - М.: Высш. шк., 1990, стр.227, рис.11.4].
Известны также следящий измеритель с корректируемым фильтром [2, Патент РФ №2156477, 07.06.1999], двухдиапазонный следящий измеритель [3, Патент РФ №2181899, 03.04.2000], следящий измеритель с обнаружителем маневра [4, Патент РФ №2253131, 14.01.2004], следящий измеритель с обнаружителем маневра и адаптивной коррекцией прогноза [5, Патент РФ №2296348, 11.04.2005], основу которых составляют α-β-фильтры, обнаружители маневра, построенные на основе пороговых устройств, коммутаторы и цепи коррекции значений оценок координат и их производных.
Недостатком вышеуказанных устройств является отсутствие учета ограниченных размеров стробов сопровождения, а по сути - представление строба сопровождения с неограниченными размерами при синтезе структуры следящих систем. На самом деле, при наличии (например, в телевизионном растре [6, Коротаев В.В., Краснящих А.В. Телевизионные измерительные системы. - СПб, СпбГУ ИТМО, 2008, стр.56-59, 83-92. http://window.edu.m/window_catalog/files/r54401 /itmo212.pdf или http://books.ifmo.ru/book/pdf/290.pdf] нескольких отметок от целей на практике производится операция стробирования для селекции сопровождаемых объектов. При этом с целью улучшения селективных характеристик следящей системы размеры строба сопровождения уменьшают, чтобы ограничить возможность попадания в строб отметок от соседних объектов.
Наиболее близкой к предлагаемому решению по технической сущности и достигаемому эффекту является цифровая следящая система [7, Способ слежения за объектом и цифровая телевизионная следящая система для его реализации. Заявка на изобретение №2010126707 от 29.06.2010]. Указанная следящая система, в состав которой входят дискриминатор и траекторный фильтр, функционально состоит и двух одинаковых следящих систем - по кадру (координате x) и строке (координате y). С учетом идентичности следящих систем, в качестве прототипа взята цифровая следящая система по кадру (координате y).
Известная цифровая следящая система содержит последовательно соединенные дискриминатор, первый блок умножения, первый сумматор, первый блок задержки и второй сумматор, соединенный выходом с вторым входом дискриминатора и с вторым входом первого сумматора, на третий вход которого подается первоначальное значение оцениваемой координаты, последовательно соединенные второй блок умножения, третий сумматор, второй блок задержки и третий блок умножения, на второй вход которого подается сигнал, соответствующий периоду дискретизации, а выход соединен с вторым входом второго сумматора, выход второго блока задержки соединен с вторым входом третьего сумматора, выход дискриминатора, первый вход которого является входом устройства, соединен с первым входом второго блока умножения, на второй вход которого поступает сигнал второго весового элемента, сигнал первого весового элемента подается на второй вход первого блока умножения.
Недостатком известного устройства является отсутствие учета обусловленных операцией стробирования ограничений статической характеристики дискриминатора следящей системы, приводящее при существенном, заранее неизвестном отклонении закона движения объекта сопровождения от модели, заложенной в экстраполяторе, к возрастанию динамических ошибок оценивания, а значит, и ошибок экстраполяции, и, как следствие, к срыву слежения за счет превышения ошибками слежения величин ограниченных линейных участков дискриминаторных характеристик.
Техническим результатом заявляемого технического решения при наличии операции стробирования в следящей системе является повышение точности оценивания параметров движения сопровождаемого объекта и повышение динамической устойчивости устройства при маневрировании объекта.
Это достигается тем, что цифровая следящая система, содержащая последовательно соединенные дискриминатор, первый блок умножения, первый сумматор, первый блок задержки и второй сумматор, соединенный выходом с вторым входом дискриминатора и с вторым входом первого сумматора, на третий вход которого подается первоначальное значение оцениваемой координаты, последовательно соединенные второй блок умножения, третий сумматор, второй блок задержки и третий блок умножения, на второй вход которого подается сигнал, соответствующий периоду дискретизации, а выход соединен с вторым входом второго сумматора, выход второго блока задержки соединен с вторым входом третьего сумматора, выход дискриминатора, первый вход которого является входом устройства, соединен с первым входом второго блока умножения, на второй вход которого поступает сигнал второго весового элемента, сигнал первого весового элемента подается на второй вход первого блока умножения, отличается тем, что в нее дополнительно введены четвертый блок умножения, соединенный выходом с четвертым входом первого сумматора, соединенные последовательно блок сглаживания, компаратор, коммутатор и пятый блок умножения, соединенный выходом с четвертым входом третьего сумматора, на третий вход которого подается первоначальное значение производной оцениваемой координаты, при этом вход блока сглаживания соединен с выходом дискриминатора, а выход - с вторым входом коммутатора, выход которого подключен к первому входу четвертого блока умножения, на второй вход которого подается первый весовой корректирующий сигнал, на второй вход компаратора подается пороговый сигнал, а на второй вход пятого блок умножения подается второй весовой корректирующий сигнал.
Технический результат достигается за счет коррекции динамических ошибок оценивания параметров движения сопровождаемого объекта на основе использования функциональной зависимости этих ошибок и непосредственно оцениваемых динамических ошибок слежения.
Суть заявляемого устройства поясняется чертежами.
На фиг.1 представлена функциональная схема следящей системы (прототип);
на фиг.2 - функциональная схема предлагаемой следящей системы;
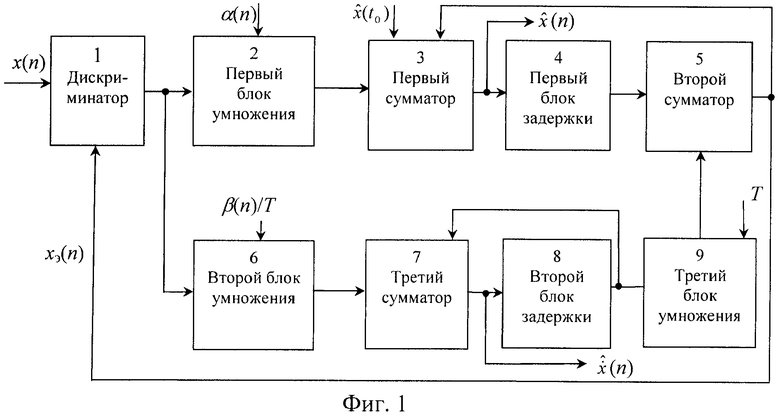
на фиг.3 - функциональная схема дискриминатора;
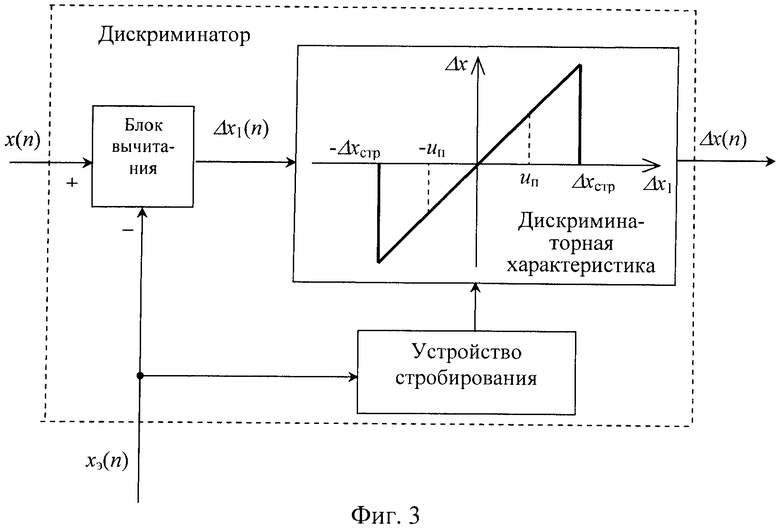
на фиг.4 - функциональная схема блока сглаживания;
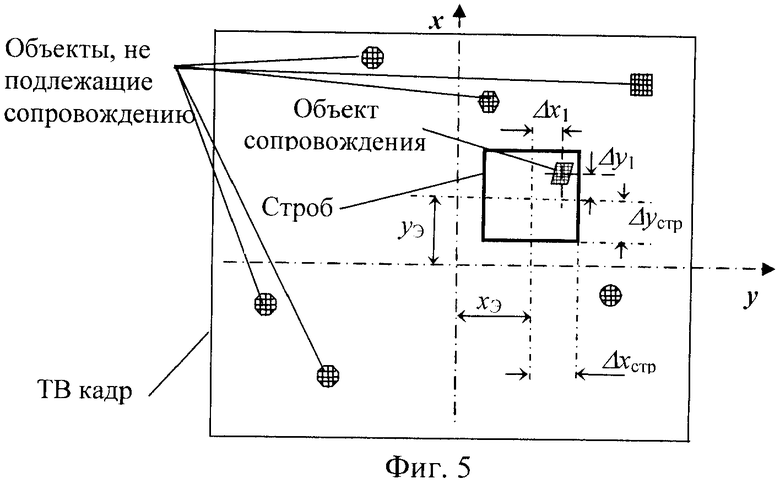
на фиг.5 - взаимное расположение объекта и строба сопровождения в телевизионном кадре;
на фиг.6 - результаты моделирования работы устройства: а) входное воздействие, б) графики ошибок слежения, в) графики ошибок оценивания сопровождаемой координаты.
Цифровая следящая система (фиг.2) содержит последовательно соединенные дискриминатор 1, первый блок 2 умножения, первый сумматор 3, первый блок 4 задержки и второй сумматор 5, последовательно соединенные второй блок 6 умножения, третий сумматор 7, второй блок 8 задержки и третий блок 9 умножения, четвертый блок 10 умножения, соединенный выходом с четвертым входом первого сумматора 3, последовательно соединенные блок 11 сглаживания, компаратор 12, коммутатор 13, пятый блок 14 умножения, соединенный выходом с четвертым входом третьего сумматора 7. На второй вход третьего 9 блока умножения подается сигнал, соответствующий периоду дискретизации Т, а его выход соединен с вторым входом второго сумматора 5, выход которого подключен к вторым входам первого сумматора 3 и дискриминатора 1, первый вход которого является входом следящей системы. Выход второго блока 8 задержки подключен также к второму входу третьего сумматора 7. На третьи входы первого и третьего сумматоров 3 и 7 подаются соответственно начальные значения оцениваемых координаты и ее производной. Выход дискриминатора 1 соединен также с входом блока 11 сглаживания, выход которого подключен также к второму входу коммутатора 13, соединенного выходом также с входом четвертого блока 10 умножения.
Цифровая следящая система работает следующим образом.
В начальный момент времени t0 на третьи входы первого и третьего сумматоров 3 и 7 подаются начальные значения оцениваемой координаты  и ее производной
и ее производной  соответственно. Следовательно, на выходах сумматоров 3 и 7 формируются соответствующие начальные значения оценок координаты и ее производной. Далее устройство работает в следящем режиме. При этом в каждый дискретный момент времени n=t/T (здесь t - текущее время, а Т - интервал дискретизации следящей системы) на первый вход дискриминатора 1 поступают измеренные значения координаты x(n), на второй вход которого поступает сигнал обратной связи следящей системы, равный значению экстраполированной координаты xэ(n). На выходе дискриминатора 1 формируется сигнал ошибки слежения Δx(n), равный разности
соответственно. Следовательно, на выходах сумматоров 3 и 7 формируются соответствующие начальные значения оценок координаты и ее производной. Далее устройство работает в следящем режиме. При этом в каждый дискретный момент времени n=t/T (здесь t - текущее время, а Т - интервал дискретизации следящей системы) на первый вход дискриминатора 1 поступают измеренные значения координаты x(n), на второй вход которого поступает сигнал обратной связи следящей системы, равный значению экстраполированной координаты xэ(n). На выходе дискриминатора 1 формируется сигнал ошибки слежения Δx(n), равный разности

Чтобы не было срыва слежения объекта по сопровождаемой координате при наличии операции стробирования (фиг.3), реализуемой в дискриминаторе 1, необходимо обеспечивать нахождение ошибки слежения Δx(n) в пределах рабочего линейного участка (-Δхстр<Δx(n)<+Δхстр) статической характеристики дискриминатора 1, здесь Δxстр - размер полустроба сопровождения по координате х. Если выполняется условие |Δх(n)|<Δхcтр, то измеренная ошибка слежения Δх(n) равна измеряемой Δх1(n), в противном случае Δx(n)=0, и происходит срыв сопровождения.
На фиг.3 величиной un обозначена величина порога, при превышении которого активизируется работа четвертого и пятого блоков умножения 10 и 14 соответственно.
Если величина отфильтрованной ошибки слежения  с выхода блока 11 сглаживания не превышает величины порога uп, то на управляющий первый вход коммутатора 13 подается нулевой сигнал. Коммутатор 13 не пропускает сигнал
с выхода блока 11 сглаживания не превышает величины порога uп, то на управляющий первый вход коммутатора 13 подается нулевой сигнал. Коммутатор 13 не пропускает сигнал  на свой выход, и на его выходе формируется также нулевой сигнал, поступающий на первые входы четвертого и пятого блоков умножения 10 и 14, с выходов которых нулевые сигналы подаются на четвертые входы первого и третьего сумматоров 3 и 7 соответственно. В этом случае цифровая следящая система реализует линейный α-β-фильтр с постоянными коэффициентами сглаживания α(n)=α для координаты и β(n)/Т=β/Т для производной координаты соответственно. Значения данных коэффициентов подаются на вторые входы первого и второго блоков 2 и 6 умножения соответственно. На первые входы этих блоков с выхода дискриминатора 1 подается сигнал измеренной ошибки слежения Δх(n).
на свой выход, и на его выходе формируется также нулевой сигнал, поступающий на первые входы четвертого и пятого блоков умножения 10 и 14, с выходов которых нулевые сигналы подаются на четвертые входы первого и третьего сумматоров 3 и 7 соответственно. В этом случае цифровая следящая система реализует линейный α-β-фильтр с постоянными коэффициентами сглаживания α(n)=α для координаты и β(n)/Т=β/Т для производной координаты соответственно. Значения данных коэффициентов подаются на вторые входы первого и второго блоков 2 и 6 умножения соответственно. На первые входы этих блоков с выхода дискриминатора 1 подается сигнал измеренной ошибки слежения Δх(n).
Сигналы α(n)Δx(n) и β(n)Δх(n)/Т с выходов первого и второго блоков 2 и 6 умножения подаются на первые входы первого и второго сумматоров 3 и 7 соответственно, на выходах которых в дискретные моменты времени n с интервалом дискретизации Т формируются соответствующие оценки координаты  объекта слежения и ее производной
объекта слежения и ее производной  Данные оценки подаются соответственно на входы первого и второго блоков 4 и 8 задержки, на выходах которых формируются соответствующие задержанные на один такт работы следящей системы оценки параметров объекта
Данные оценки подаются соответственно на входы первого и второго блоков 4 и 8 задержки, на выходах которых формируются соответствующие задержанные на один такт работы следящей системы оценки параметров объекта  и
и  .
.
С выхода первого блока 4 задержки сигнал  подается на первый вход второго сумматора 5, а с выхода второго блока 8 задержки сигнал
подается на первый вход второго сумматора 5, а с выхода второго блока 8 задержки сигнал  ) подается на второй вход третьего сумматора 7 и первый вход третьего блока 9 умножения, на второй вход которого подается сигнал, соответствующий периоду дискретизации Т следящей системы.
) подается на второй вход третьего сумматора 7 и первый вход третьего блока 9 умножения, на второй вход которого подается сигнал, соответствующий периоду дискретизации Т следящей системы.
Таким образом, выражение, в соответствии с которым на выходе третьего сумматора 7 формируется сигнал оценки производной координаты объекта слежения, имеет вид:

С выхода третьего блока 9 умножения сигнал  ·T поступает на второй вход второго сумматора 5, на выходе которого формируется сигнал экстраполированной на момент времени n координаты объекта xэ(n) в соответствии с выражением:
·T поступает на второй вход второго сумматора 5, на выходе которого формируется сигнал экстраполированной на момент времени n координаты объекта xэ(n) в соответствии с выражением:

Данный сигнал подается на второй вход дискриминатора 1 и второй вход первого сумматора 3, на выходе которого формируется сигнал оценки  ) в соответствии с выражением:
) в соответствии с выражением:

С выхода дискриминатора 1 измеренный сигнал ошибки слежения Δх(n) подается также на вход блока 11 сглаживания, на выходе которого формируется сигнал  , пропорциональный среднему значению
, пропорциональный среднему значению  ошибки слежения Δx(n). Сигнал
ошибки слежения Δx(n). Сигнал  в блоке 11 сглаживания, если динамическая составляющая
в блоке 11 сглаживания, если динамическая составляющая  ошибки слежения Δx(n) изменяется с незначительной интенсивностью, определяется либо как среднее арифметическое за несколько (на практике - несколько единиц) тактов работы устройства, либо по выражению экспоненциального сглаживания [8, Кузьмин С.З. Основы теории цифровой обработки радиолокационной информации. - М.: Советское радио, 1974, стр.400, выр. 9.7.2]:
ошибки слежения Δx(n) изменяется с незначительной интенсивностью, определяется либо как среднее арифметическое за несколько (на практике - несколько единиц) тактов работы устройства, либо по выражению экспоненциального сглаживания [8, Кузьмин С.З. Основы теории цифровой обработки радиолокационной информации. - М.: Советское радио, 1974, стр.400, выр. 9.7.2]:

где Ψ - задаваемый весовой коэффициент. Известная структура блока 11 сглаживания, соответствующая выражению (5), для наглядности приведена на фиг.4 [8, стр.400, рис.4.19]. Сигнал измеренной невязки Δx(n) через шестой блок 15 умножения с коэффициентом передачи (1-Ψ) подается на первый вход четвертого сумматора 16, на второй вход которого через седьмой блок 18 умножения с коэффициентом Ψ поступает сигнал 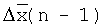 , т.е. задержанный на один такт в третьем блоке 17 задержки сигнал
, т.е. задержанный на один такт в третьем блоке 17 задержки сигнал  с выхода четвертого сумматора 16. Этот сигнал
с выхода четвертого сумматора 16. Этот сигнал  и является выходным сигналом блока 11 сглаживания.
и является выходным сигналом блока 11 сглаживания.
Если же динамическая составляющая  ошибки слежения Δx(n) в следящей системе изменяется интенсивно, то значение сигнала
ошибки слежения Δx(n) в следящей системе изменяется интенсивно, то значение сигнала  может формироваться в соответствии с выражением [8, стр.400-401, выр. 9.7.3, 9.7.4]:
может формироваться в соответствии с выражением [8, стр.400-401, выр. 9.7.3, 9.7.4]:

Если величина усредненной в блоке 11 сглаживания ошибки слежения  превышает величину порога uп, то на выходе компаратора 12 формируется разрешающий сигнал, который поступает на управляющий первый вход коммутатора 13, который пропускает на свой выход сигнал
превышает величину порога uп, то на выходе компаратора 12 формируется разрешающий сигнал, который поступает на управляющий первый вход коммутатора 13, который пропускает на свой выход сигнал  , подаваемый на его второй вход с выхода блока 11 сглаживания.
, подаваемый на его второй вход с выхода блока 11 сглаживания.
В работе [9, Мелешко А.В., Пятков В.В. Методика оценки динамической точности телевизионных следящих систем. Вопросы радиоэлектроники. Серия «Техника телевидения», вып.2, 2009, с.93-102] показана функциональная зависимость между динамической ошибкой слежения  , представляющей собой среднее значение mΔx(n) ошибки слежения Δx(n), и динамическими ошибками оценивания координаты
, представляющей собой среднее значение mΔx(n) ошибки слежения Δx(n), и динамическими ошибками оценивания координаты  и первой производной от координаты
и первой производной от координаты  :
:


С выхода коммутатора 13 сигнал , пропорциональный динамической составляющей  , подается на первые входы четвертого и пятого блоков 10 и 14 умножения, на вторые входы которых подаются соответственно первый (1-α) и второй (α-β)/Т весовые корректирующие сигналы согласно выражениям (7). С выходов четвертого и пятого блоков 10 и 14 умножения корректирующие сигналы
, подается на первые входы четвертого и пятого блоков 10 и 14 умножения, на вторые входы которых подаются соответственно первый (1-α) и второй (α-β)/Т весовые корректирующие сигналы согласно выражениям (7). С выходов четвертого и пятого блоков 10 и 14 умножения корректирующие сигналы  и
и  поступают на четвертые входы соответственно первого и третьего сумматоров 3 и 7, осуществляя таким образом компенсацию динамической составляющей ошибок оценивания координаты и ее производной.
поступают на четвертые входы соответственно первого и третьего сумматоров 3 и 7, осуществляя таким образом компенсацию динамической составляющей ошибок оценивания координаты и ее производной.
Для подтверждения достижения технического результата заявляемого технического решения было проведено моделирование работы прототипа и предлагаемой цифровой следящей системы в качестве следящих систем.
На фиг.5 приведено расположение в телевизионном кадре строба сопровождения и объекта слежения в стробе [7]. При увеличении измеряемых ошибок слежения Δx1(n)) и(или) Δy1(n) они могу превысить размеры полустроба Δxстр и(или) Δyстр. В итоге (фиг.3) измеренные дискриминатором ошибки слежения Δx(n) и(или) Δy(n) примут значение нуля ввиду ограниченных размеров дискриминаторной характеристики, и произойдет срыв слежения.
На практике [7] для сопровождения объекта в ТВ кадре используют два идентичных канала слежения по строке (координате y) и кадру (координате x). Поэтому моделирование проводилось для одной из координат, например координаты х. Данные получены по результатам моделирования при исходных данных:
T=0,02 сек; Ψ=0,8; uп=0,01 град; α=0,1; β=0,004.
Измеренное значение координаты x(n) при моделировании задавалось в виде аддитивной смеси полезного (модельного) значения координаты xм(n) и ошибок измерения f(n):

Среднеквадратическое отклонение гауссовских ошибок измерения принималось равным σf=10-3 град.
На фиг.6,а приведены графики изменения координаты xм(n) точечного объекта слежения и ее производных, на фиг.6,б - графики величин ошибок слежения Δx1(n) для линейного дискриминатора (без операции стробирования), на фиг.6,в - графики ошибок оценивания координат:

Сплошными и пунктирными линиями показаны графики для предлагаемой цифровой следящей системы и прототипа соответственно.
Результаты моделирования показывают, что применение предлагаемой коррекции динамических ошибок оценивания в моменты изменения закона движения объекта сопровождения позволяют повысить как точность оценивания его координат, так и устойчивость цифровой следящей системы без расширения размеров строба сопровождения в отличие от систем без коррекции. Так, из фиг.6,б следует, что если размер полустроба сопровождения составляет 0,03 град, то в следящей системе без коррекции произойдет срыв сопровождения, а в системе с коррекцией динамических ошибок срыва сопровождения (даже без увеличения размеров строба) не будет, т.к. ошибка слежения Δx1(n) не превысит размеров полустроба. При этом на участке движения объекта, где отсутствует ускорение в законе его движения, ошибки оценивания координат для обоих фильтров одинаковы.
| название | год | авторы | номер документа |
|---|---|---|---|
| АДАПТИВНЫЙ СЛЕДЯЩИЙ ИЗМЕРИТЕЛЬ | 2012 |
|
RU2492506C1 |
| СЛЕДЯЩИЙ ИЗМЕРИТЕЛЬ | 2010 |
|
RU2435172C1 |
| СПОСОБ СЛЕЖЕНИЯ ЗА ОБЪЕКТОМ И ЦИФРОВАЯ ТЕЛЕВИЗИОННАЯ СЛЕДЯЩАЯ СИСТЕМА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2010 |
|
RU2440691C1 |
| ДВУХДИАПАЗОННЫЙ СЛЕДЯЩИЙ ИЗМЕРИТЕЛЬ | 2000 |
|
RU2181899C2 |
| ЦИФРОВОЙ ВРЕМЕННОЙ ДИСКРИМИНАТОР | 2011 |
|
RU2445728C1 |
| СЛЕДЯЩИЙ ИЗМЕРИТЕЛЬ С КОРРЕКТИРУЕМЫМ ФИЛЬТРОМ | 1999 |
|
RU2156477C1 |
| СЛЕДЯЩИЙ ИЗМЕРИТЕЛЬ С АДАПТИВНЫМ ФИЛЬТРОМ | 1998 |
|
RU2148836C1 |
| ТЕЛЕВИЗИОННЫЙ АДАПТИВНЫЙ ИЗМЕРИТЕЛЬ КООРДИНАТ | 1988 |
|
SU1623536A1 |
| БОРТОВАЯ РАДИОЛОКАЦИОННАЯ СТАНЦИЯ СОПРОВОЖДЕНИЯ ДВУХ ЦЕЛЕЙ | 1992 |
|
RU2074405C1 |
| ТЕЛЕВИЗИОННЫЙ КООРДИНАТНЫЙ ДИСКРИМИНАТОР | 1996 |
|
RU2143182C1 |

Изобретение относится к радиоавтоматике и может быть использовано в телевизионных системах измерения параметров траекторий объектов сопровождения и других следящих системах, в которых информация о непосредственно измеряемых координатах формируется с помощью соответствующих дискриминаторов. Техническим результатом заявляемого технического решения при наличии операции стробирования в следящей системе является повышение точности оценивания параметров движения сопровождаемого объекта и повышение динамической устойчивости устройства при маневрировании объекта. Система содержит дискриминатор, пять блоков умножения, три сумматора, два блока задержки, блок сглаживания, компаратор, коммутатор. 6 ил.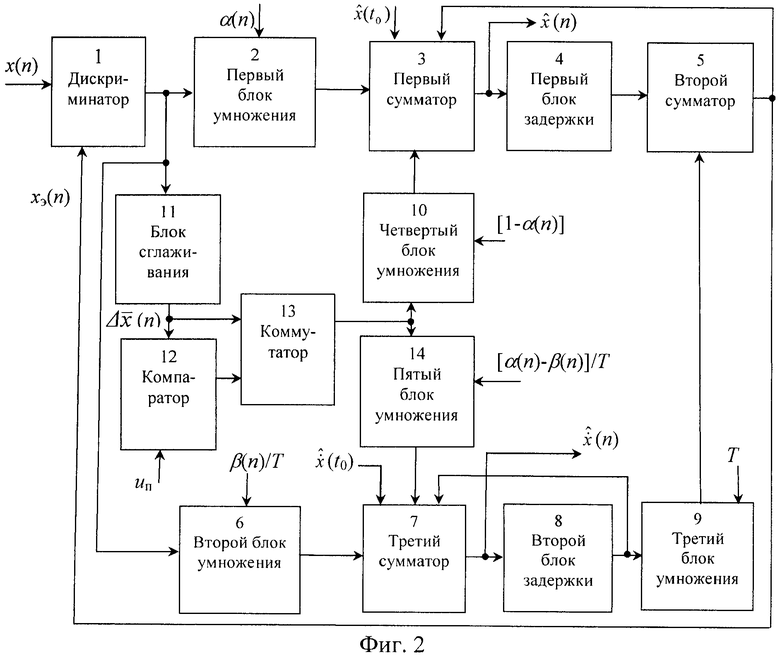
Цифровая следящая система, содержащая последовательно соединенные дискриминатор, первый блок умножения, первый сумматор, первый блок задержки и второй сумматор, соединенный выходом с вторым входом дискриминатора и с вторым входом первого сумматора, на третий вход которого подается первоначальное значение оцениваемой координаты, последовательно соединенные второй блок умножения, третий сумматор, второй блок задержки и третий блок умножения, на второй вход которого подается сигнал, соответствующий периоду дискретизации, а выход соединен с вторым входом второго сумматора, выход второго блока задержки соединен с вторым входом третьего сумматора, выход дискриминатора, первый вход которого является входом устройства, соединен с первым входом второго блока умножения, на второй вход которого поступает сигнал второго весового элемента, сигнал первого весового элемента подается на второй вход первого блока умножения, отличающаяся тем, что в нее дополнительно введены четвертый блок умножения, соединенный выходом с четвертым входом первого сумматора, соединенные последовательно блок сглаживания, компаратор, коммутатор и пятый блок умножения, соединенный выходом с четвертым входом третьего сумматора, на третий вход которого подается первоначальное значение производной оцениваемой координаты, при этом вход блока сглаживания соединен с выходом дискриминатора, а выход - с вторым входом коммутатора, выход которого подключен к первому входу четвертого блока умножения, на второй вход которого подается первый весовой корректирующий сигнал, на второй вход компаратора подается пороговый сигнал, а на второй вход пятого блока умножения подается второй весовой корректирующий сигнал.
| СЛЕДЯЩИЙ ИЗМЕРИТЕЛЬ С ОБНАРУЖИТЕЛЕМ МАНЕВРА И АДАПТИВНОЙ КОРРЕКЦИЕЙ ПРОГНОЗА | 2005 |
|
RU2296348C2 |
| ТЕЛЕВИЗИОННЫЙ АДАПТИВНЫЙ ИЗМЕРИТЕЛЬ КООРДИНАТ | 1988 |
|
SU1623536A1 |
| Следящая система | 1986 |
|
SU1383286A1 |
| JP 2004304244 A, 28.10.2004 | |||
| JP 2003161777 A, 06.06.2003. | |||

