Изобретение относится к военной технике, а именно к буксируемым, самоходным и другим артиллерийским орудиям.
Современные артиллерийские орудия оснащаются средствами автоматизации их навигации и управления наведением на цель. Важнейшей составной частью этих средств является гироскопическое устройство. Гироскопическое устройство (гироблок) автоматически вырабатывает информацию в полярной системе координат о приращении дирекционного (курсового) угла и об углах крена и тангажа орудия (углах его наклона относительно горизонта в поперечном и продольном направлениях). Эта информация используется для точного наведения орудия на цель. Для получения достоверных данных о названных углах гироскопическое устройство должно быть строго скоординировано относительно выбранной для его крепления базы на орудии. Это условие является обязательным для всех типов орудий: буксируемых, самоходных и других.
На принятом за прототип самоходном артиллерийском орудии 2С31 (копия чертежа прилагается) такой базой является жестко закрепленный на шаровом погоне башни орудия кронштейн, на котором также жестко закреплена система гироскопического курсо- креноуказания (СГККУ).
При стрельбе из этого орудия кронштейн СГККУ подвергается большим вибрационным перегрузкам (по ускорению до 23g), которые оказывают весьма негативное влияние как на ресурс гироблока, так и на точность его измерений, особенно при стрельбе на борт на угле возвышения ствола в 65°. При этом необходимо отметить, что вибрации кронштейна орудия при выстреле имеют относительно широкий спектр частот (от 10 до 200 Гц), а резонансная частота колебаний гироблока составляет 30 Гц и, следовательно, находится в этом спектре. Поэтому колебания кронштейна с частотой 30 Гц и перегрузкой до 6g (по данным осциллограмм) вызывают резонансные колебания гироблока и выход его из строя.
Попытки применения классических приборных демпферов для снижения перегрузок гироскопа и фильтрации резонансной частоты колебаний кронштейна не дают положительных результатов, так как нарушают плоскопараллельную координацию гироскопического устройства по отношению к кронштейну и приводят к большим погрешностям его измерений и, как следствие, к недопустимо большому рассеиванию снарядов при стрельбе.
Целью изобретения является повышение точности стрельбы из орудия и исключение повреждения гироскопического устройства путем уменьшения воздействия колебаний орудия при стрельбе на гироблок.
Предлагаемое орудие лишено перечисленных недостатков. Сущность предлагаемого изобретения состоит в том, что гироскопическое устройство установлено с возможностью его плоскопараллельного перемещения по трем взаимно перпендикулярным направлениям относительно исходного положения минимум на одном шарнирном параллелограммном механизме, нижнее основание которого закреплено неподвижно на орудии, а на верхнем закреплено неподвижно гироскопическое устройство. При этом верхнее основание подпружинено относительно нижнего основания таким образом, что рычаги параллелограммного механизма в состоянии покоя расположены под тупым углом к плоскости горизонтального наведения орудия в секторе его стрельбы. На нижнем основании жестко закреплены, как минимум, две пластинчатые V-образные пружины и одна одноплечая пластинчатая пружина. При этом одна V-образная пружина упирается своими свободными лапами в верхнее основание, а другая имеет между своими лапами и верхним основанием зазор, меньший амплитуды низкочастотных вертикальных колебаний верхнего основания. Последнее условие необходимо для того, чтобы при низкочастотных колебаниях с большой амплитудой нагруженного верхнего основания в работу включалась вторая V-образная пружина, ограничивающая указанные колебания. Третья одноплечая пружина упирается плоскостью свободного конца в торец верхнего основания. Верхнее основание, кроме того, подпружинено относительно нижнего в направлении осей шарниров параллелограммного механизма. Геометрические размеры и жесткости всех пружин определены исходя из допустимой перегрузки гироскопа и отношения резонансной частоты его колебаний к собственной частоте колебаний нагруженного верхнего основания, большего единицы. Последнее условие позволяет отфильтровать колебания орудия с частотой, равной или близкой резонансной частоте колебаний гироблока, и тем самым избежать недопустимой его перегрузки.
Жесткое крепление пластинчатых пружин на нижнем основании параллелограммного механизма и возможность скольжения их свободных лап (плоскостей) относительно верхнего основания являются достаточными условиями рассеивания энергии его колебательных движений на преодоление сил трений в местах контакта с пружинами и, следовательно, обеспечения ускоренного затухания указанных колебаний.
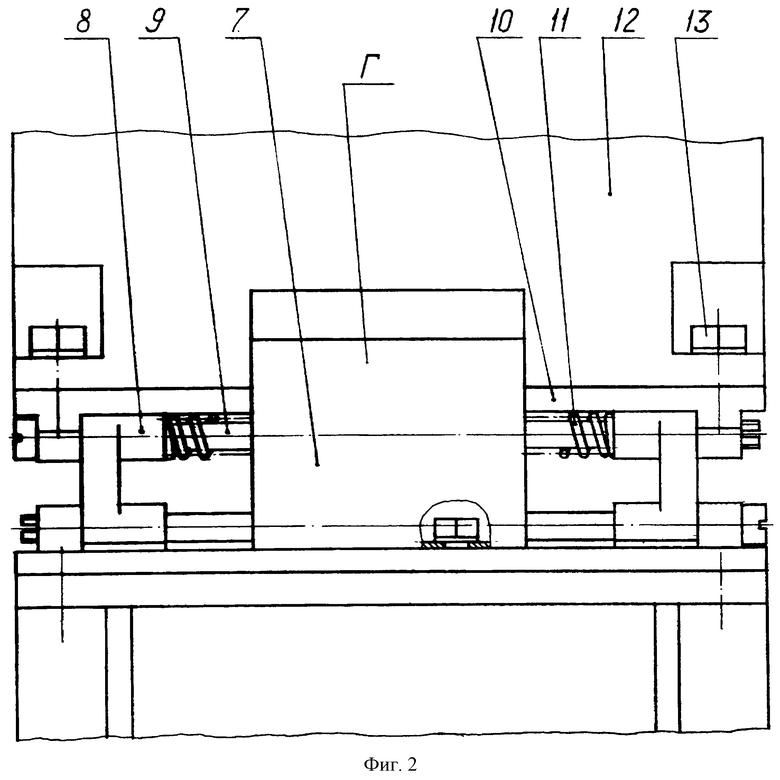
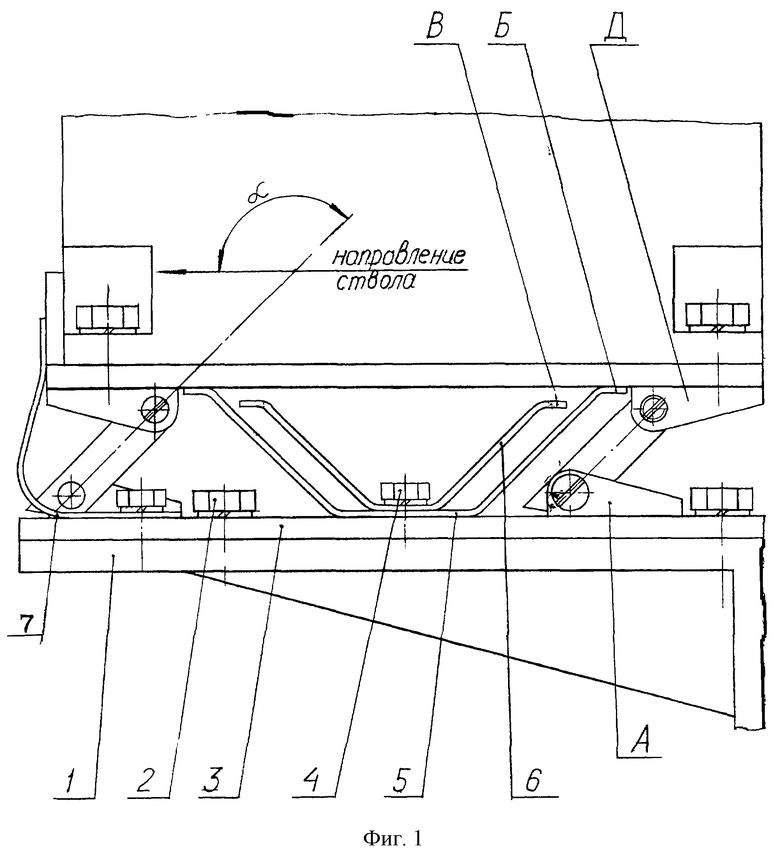
Изобретение поясняется чертежами, где на фиг.1 представлена часть проекции в продольном сечении орудия, на фиг.2 - часть проекции в поперечном сечении орудия. В изображенном на чертеже примере выполнения гироскопическое устройство установлено на двух параллелограммных механизмах.
На кронштейне 1 орудия жестко закреплено болтами 2 нижнее основание 3 с шарнирными башмаками А параллелограммного механизма. На этом основании закреплены болтами 4 две V-образные пластинчатые пружины 5 и 6 с лапами Б и В и одноплечая пластинчатая пружина 7 с опорной консолью Г, упирающейся в верхнее основание. К нижнему основанию 3 присоединено посредством наклонных рычагов 8 и осей 9 верхнее основание 10 с шарнирными башмаками Д. При этом верхнее основание 10, нижнее основание 3, рычаги 8 и оси 9 образуют параллелограммный механизм.
В состоянии покоя рычаги расположены под тупым углом α, например 135°, к нижнему основанию в секторе стрельбы (или под острым углом в тыльном секторе орудия). Такое положение рычагов обеспечивает снижение перегрузок верхнего основания с гироскопическим устройством во всем диапазоне углов вертикального наведения ствола. С учетом отмеченного тупой угол определяется соотношением:
где ϕmin - минимальный угол склонения ствола;
ϕmax - максимальный угол склонения ствола.
На верхних осях 9 параллелограммного механизма между боковыми рычагами 8 установлены цилиндрические пружины 11. Гироскопическое устройство 12 установлено и жестко закреплено болтами 13 на верхнем основании 10 параллелограммного механизма.
В состоянии покоя пружина 5 упирается в верхнее основание 10 своими лапами Б и пружина 7 поджата к его торцу.
Функционирование предлагаемого устройства орудия заключается в следующем.
При выстреле орудие под действием силы отдачи перемещается вместе с нижним основанием 3 первоначально назад и вниз. Верхнее основание 10 с гироскопическим устройством в силу своей инерционности и упругой кинетической связи с нижним основанием отстает от него по фазе движения, обуславливая поворот рычагов 8 параллелограмма относительно нижнего основания по часовой стрелке и дополнительный прогиб сверх предварительного поджатия одноплечей пружины 7. При этом плоский конец пружины 7 скользит с трением по торцу верхнего основания 10, а лапы Б V-образной пружины - по его нижней плоскости. В этот период движения на верхнее основание и гироскопическое устройство воздействуют только силы их тяжести, одноплечей пружины и убывающей силы предварительного поджатия V-образной пружины 5, которые в сумме значительно меньше возникающих при выстреле перегрузок.
Под действием сил тяжести и упругости пружины верхнее основание с гироскопическим устройством также приходит в ускоренное движение по направлению назад - вниз, в то время как нижнее основание после торможения совершает возвратное движение под действием сил упругости грунта и элементов конструкции орудия.
Под действием поперечной составляющей силы отдачи верхнее основание смещается относительно нижнего вдоль осей 9 вправо или влево в зависимости от направления приложенной силы, поджимая пружины в том или другом направлении.
Таким образом, верхнее основание с гироскопическим устройством совершает строго плоскопараллельные колебательные перемещения относительно нижнего, чем и обеспечивается точность измерения углов курса, крена и тангажа орудия и, следовательно, точность его стрельбы.
Движения нижнего и верхнего оснований имеют сложный затухающий характер с несущими и наложенными частотами. При этом спектр частот колебаний нижнего основания лежит в диапазоне 10-200 Гц, а верхнего основания - в диапазоне 10-15 Гц. Верхним пределом колебаний верхнего основания с гироскопическим устройством является его собственная частота колебаний, определяемая упругомассовыми его характеристиками по зависимости
где ω=2πν - циклическая частота колебаний верхнего основания;
ν, 1/с - собственная частота колебаний верхнего основания (Гц);
 - масса верхнего основания с гироскопическим устройством и смонтированными на нем деталями;
- масса верхнего основания с гироскопическим устройством и смонтированными на нем деталями;
G, кгс - вес верхнего основания с гироскопическим устройством и смонтированными на нем деталями;
 - жесткость пружины 5 (6, 7);
- жесткость пружины 5 (6, 7);
 - модуль упругости металла пружины;
- модуль упругости металла пружины;
 - осевой момент инерции пружины 5 (6, 7);
- осевой момент инерции пружины 5 (6, 7);
b=2b1; м - ширина пружины;
b1; м - ширина одной ветви V-образной пружины 5 (6, 7);
δ, м - толщина пружины 5 (6, 7);
l, м - длина ветви пружины 5, (6, 7).
Описанное устройство предлагаемого орудия с СГККУ было испытано на вибростенде с перегрузками по ускорению до 20g в диапазоне моночастот 5-500 Гц.
Эти испытания показали, что:
- амплитуды колебаний верхнего основания с СГККУ значительно меньше максимально допустимых стрел изгиба пружин;
- перегрузки верхнего основания по ускорению составляют в зависимости от направления колебаний (продольное, вертикальное) 5,2-12,0g, что в 1,5-3,5 раза меньше перегрузок, приложенных к нижнему основанию;
- собственная частота колебаний верхнего основания с СПОКУ составляет 12 Гц, что в 2,5 раза меньше резонансной частоты колебаний гироблока.
Рассмотренные преимущества предлагаемого устройства орудия были также подтверждены испытаниями на вибростенде, имитирующем вибрации при стрельбе самоходного артиллерийского орудия 2С31, и натуральным испытаниям в составе этого орудия.
Упругомассовые характеристики и геометрические параметры параллелограммного механизма конкретного буксируемого, самоходного или иного орудия определяются вышеизложенным способом исходя из допустимых перегрузок и резонансной частоты колебаний гироблока применяемого гироскопического устройства, а также выбранной базы для его установки на орудии.
| название | год | авторы | номер документа |
|---|---|---|---|
| АРТИЛЛЕРИЙСКОЕ ОРУДИЕ | 2005 |
|
RU2300072C1 |
| АМОРТИЗИРУЮЩЕЕ УСТРОЙСТВО НАВИГАЦИОННОГО АРТИЛЛЕРИЙСКОГО ПРИБОРА | 2008 |
|
RU2367880C1 |
| АМОРТИЗИРУЮЩЕЕ УСТРОЙСТВО НАВИГАЦИОННОГО ПРИБОРА АРТИЛЛЕРИЙСКОГО ОРУДИЯ | 2010 |
|
RU2418258C1 |
| АМОРТИЗАТОР ГИРОСКОПИЧЕСКОГО УСТРОЙСТВА АРТИЛЛЕРИЙСКОГО ОРУДИЯ | 2004 |
|
RU2267076C1 |
| АМОРТИЗАТОР ГИРОСКОПИЧЕСКОГО УСТРОЙСТВА АРТИЛЛЕРИЙСКОГО ОРУДИЯ | 2010 |
|
RU2420703C1 |
| БОЕВОЕ ОТДЕЛЕНИЕ БРОНИРОВАННОЙ МАШИНЫ | 2003 |
|
RU2258889C2 |
| БОЕВОЙ МОДУЛЬ СО СТАБИЛИЗАЦИЕЙ ЛИНИИ ПРИЦЕЛИВАНИЯ ВООРУЖЕНИЯ | 2023 |
|
RU2816100C1 |
| УСТРОЙСТВО ОПОРНОЕ | 2023 |
|
RU2830436C1 |
| Рабочий орган почвообрабатывающего орудия ПРМ-3-3 | 1988 |
|
SU1604176A1 |
| СТАБИЛИЗАТОР ВООРУЖЕНИЯ БОЕВОГО МОДУЛЯ | 2023 |
|
RU2827861C1 |
Изобретение относится к артиллерии, в частности к артиллерийским орудиям с системой наведения. Сущность изобретения заключается в том, что гироскопическое устройство установлено на орудии с возможностью плоскопараллельного перемещения относительно базы крепления по трем взаимно перпендикулярным направлениям минимум на одном шарнирном параллелограммном механизме. Нижнее и верхнее основания указанного механизма подпружинены относительно друг друга в вертикальном и горизонтальном направлениях таким образом, что рычаги параллелограмма в состоянии покоя расположены под тупым углом к плоскости горизонтального наведения в секторе стрельбы. Отношение резонансной частоты колебаний гироскопа к собственной частоте колебаний нагруженного гироскопическим устройством верхнего основания при стрельбе больше единицы. Реализация изобретения позволяет повысить точность стрельбы и исключить выход из строя гироскопического устройства. 2 з. п.ф-лы, 2 ил.
| СИСТЕМА УПРАВЛЕНИЯ ОГНЕМ | 2000 |
|
RU2187060C2 |
| САМОХОДНОЕ АРТИЛЛЕРИЙСКОЕ ОРУДИЕ (ВАРИАНТЫ) | 1998 |
|
RU2150064C1 |
| US 4326447, 27.04.1982 | |||
| DE 3241665 А1, 17.05.1984 | |||
| DE 3332795 A1, 28.03.1985. | |||

