Изобретение исходит из способа коррекции для счисления пути и системы навигации транспортного средства согласно ограничительной части независимых пунктов 1 и 11 формулы изобретения. В навигационной системе с использованием карт известно определение местонахождения по счислению пути таким образом, что информация, посылаемая датчиками транспортного средства, сопоставляется с картами дорог, преобразованными в цифровую форму. Проводится корректировка местонахождения транспортного средства, установленного по счислению пути, причем транспортное средство переводится на находящуюся неподалеку дорогу. Если же в направлении движения транспортного средства проходят несколько дорог под одним и тем же углом, то может случиться так, что транспортное средство будет переведено на неправильную дорогу. Однако при продолжении движения транспортное средство остается на этой "неправильной дороге", т.к. перепроверка правильности этой коррекции местонахождения не проводится.
В навигационной системе согласно ЕП 0314806 A1 определяется диапазон погрешностей предполагаемого местонахождения транспортного средства, размер которого заранее установлен датчиками пути и направления движения. В пределах диапазона погрешностей с помощью вычислительного устройства рассчитываются позиции транспортного средства, которые заданы для данной ситуации движения. C помощью оценки расстояния и других параметров позиция транспортного средства определяется как фактическая, траектория дорог в которой является наиболее близкой. В этом способе счисления пути возникает проблема, заключающаяся в том, что в узкой дорожной сети, состоящей из нескольких расположенных в непосредственной близости друг от друга параллельных путей, не всегда удается найти дорогу, по которой фактически движется транспортное средство.
Преимущества изобретения
Напротив, способ коррекции или навигационная система согласно изобретению по пунктам 1 и 11 имеет преимущество в том, что одновременно (параллельно) рассчитываются несколько возможных вариантов позиций транспортного средства, причем принимаются в расчет все дороги области движения. Даже если для наиболее вероятной позиции транспортного средства установлен главный путь, он будет сохраняться только до тех пор, пока на основе проверки на достоверность параллельный путь не станет более вероятным для позиции транспортного средства. Преимущество в результате будет заключаться в том, что станет более надежной навигация и постоянная локализация транспортного средства на дороге, на которой оно фактически находится.
За счет перечисленных в зависимых пунктах мероприятий становится возможным преимущественное усовершенствование и улучшение способа коррекции согласно пункту 1 или навигационной системы согласно пункту 11. Особое преимущество заключается в том, что за счет включения допустимой погрешности измерения датчиков и/или навигационного прибора предел погрешностей рассчитывается постоянно таким образом, что транспортное средство будет находиться с высокой степенью уверенности в пределах погрешностей. За счет этого обеспечивается фиксация возможного местонахождения транспортного средства на всех дорогах области движения.
Кроме того, в качестве главного пути целесообразно выбрать дорогу, направление которой почти совпадает с направлением счисленной дороги, которое является к ней наиболее близким. Если в ходе дальнейших измерений этот главный путь будет выбран снова, например, с учетом срока службы или угла наклона, то в этом случае будет высокая вероятность того, что она соответствует фактической дороге транспортного средства.
Для избежания смены наиболее вероятной позиции транспортного средства (позиции главного пути), например, на параллельных дорогах, отдельные участки которых находятся на незначительном удалении друг от друга, предусмотрен поправочный гистерезис, так что изменение главного пути произойдет лишь в том случае, когда оно в результате нескольких измерений окажется обоснованным.
При измерении протяженности дороги появляются ошибки, обусловленные датчиками, которые могут быть выявлены простым способом в том случае, когда транспортное средство проезжает развилку или поворот на перекрестке. В силу того, что положение перекрестка установлено точными координатами, то в результате получается опорная точка между двумя измерительными метками, которая может быть использована для коррекции измерения расстояния.
Так как местоположение транспортного средства может определяться также с помощью навигационных спутников, то ошибки, обнаруживающиеся относительно движения в поперечном направлении, более просто устраняются тем, что транспортное средство переводится вычислительным устройством относительно движения в поперечном направлении на все почти параллельные дороги. В процессе дальнейшей езды эти параллельные пути отслеживаются и при этом перепроверяются, так что после контроля на достоверность наиболее вероятный путь определяется как новый главный путь.
Другое преимущество в том, что при реализации изобретения в системе сопровождения цели поиск маршрута проводится таким образом, что главный путь рассматривается как исходная точка расчетов маршрута. В случае многозначности пути (два или несколько путей примерно с одинаковой достоверностью) конечный маршрут может стать критерием решения о выборе главного пути, т.к. велика вероятность того, что водитель транспортного средства придерживается маршрута, рекомендованного системой. Затем с помощью устройства оценки параллельных путей и устройства сравнения из рассчитанных параллельных путей всегда можно скорректировать требуемый главный путь. Если навигационная система оснащена индикатором для высвечивания карты дорог, то главный путь на данный момент может быть соответственно маркирован.
Пример выполнения изобретения изображен на чертежах и более подробно рассмотрен в нижеследующем описании, фиг.1 показывает первую блок-схему, фиг. 2 показывает вторую блок-схему, фиг. 3 показывает функциональную схему, фиг. 4 показывает часть карты дорог в цифровой форме, фиг. 5 показывает другую часть карты дорог в цифровой форме и фиг. 6 показывает третью часть карты дорог.
Описание примера выполнения
Фиг. 1 показывает первую блок-схему навигационной системы с использованием карты, на которой вычислительный блок 1 на входе соединен с датчиками 3 транспортного средства с целью фиксации направления движения и участка дороги. Далее подключен приемник 4 спутниковой навигационной системы (например, приемник глобальной спутниковой системы радиоопределения положения судов и самолетов), с помощью которого также можно определить местонахождение транспортного средства. Кроме того, вычислительный блок 1 соединен с блоком 5 вывода, например с дисплеем или блоком вывода акустического сигнала. Блок 6 ввода и блок 7 сопровождения цели соединены с вычислительным блоком 1. Блок 7 сопровождения цели или приемник 4 сигналов спутника предусматривается по выбору.
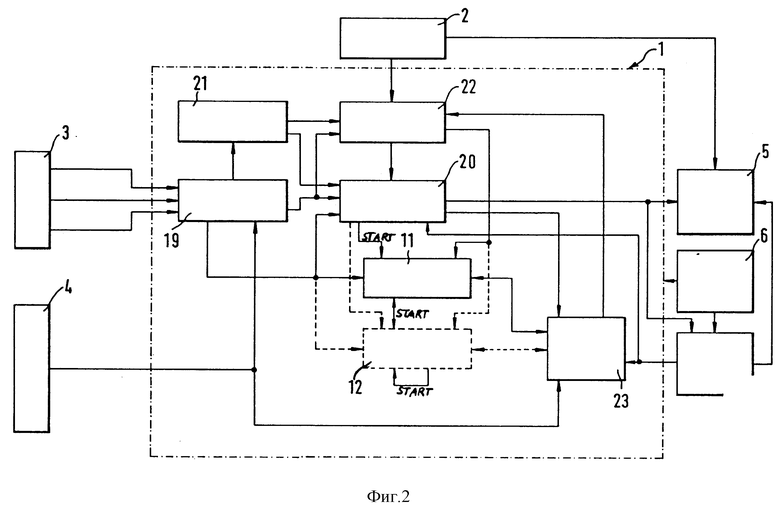
Фиг. 2 показывает в детальном выполнении вторую блок-схему навигационной системы, в которой вычислительный блок 1 изображен с несколькими функциональными блоками. В вычислительном блоке 1 содержится схема 19 счисления пути, в которую вводятся сигналы датчиков 3 и/или приемника 4 сигналов спутника. Из сигналов датчиков и предыдущей позиции схема 19 счисления пути рассчитывает новую позицию транспортного средства. Результаты счисления пути и обработанные данные датчиков вводятся в блок 21 оценки ошибок, который на основе известных допустимых погрешностей устанавливает диапазон 25 погрешностей (фиг. 4). Этот диапазон 25 погрешностей вводится в селектор 22, который с одной стороны соединен с запоминающим устройством (ЗУ) 2 записи карт. ЗУ 2 записи карт посылает в селектор 22 данные дорог, которые относятся к области 24 движения. Эта область 24 движения должна соответствовать области главного и параллельных путей карты дорог (фиг. 4).
Селектор 22 соединен с управляющим вычислительным устройством 20 и посылает в управляющее вычислительное устройство 20 данные области главного и параллельных путей. Управляющее вычислительное устройство 20 соединено со схемой 19 счисления пути и получает из него счисленную информацию о местонахождении транспортного средства. Сначала управляющее вычислительное устройство определяет независимо от параллельных путей главный путь. Здесь устанавливаются другие вероятные позиции транспортного средства рядом с главным путем (параллельные пути), которые затем обрабатываются в вычислительных устройствах 11, 12 обработки данных параллельных путей. В свою очередь, каждое вычислительное устройство обработки данных параллельных путей может определить несколько вероятных вариантов позиций транспортного средства, а затем начать обработку данных других параллельных путей в вычислительных устройствах. Вычислительные устройства обработки данных параллельных путей управляются через соответствующие линии управления START. При этом в каждое вычислительное устройство обработки данных параллельных путей через селектор 22 вводится фрагмент карты области движения 24.
Вычислительные устройства 11, 12 обработки данных параллельных путей соединены с блоком 23 оценки параллельных путей и сравнения. Блок оценки параллельных путей (блок сравнения на основе информации о состоянии, например соответствие направления движения направлению дороги) определяет параллельные пути. Данные о параллельных путях, которые при сравнении с параллельными путями и достоверностью главного пути не являются более достоверными, стираются.
Информация об абсолютной позиции транспортного средства и приблизительного диапазона разброса устройства 4 приема и обработки сигналов спутниковой навигационной системы может вызвать стирание записи данных о параллельных путях, позиция которых более не находится в диапазоне разброса местонахождения навигационного спутника.
Далее, блок 23 сравнения параллельных путей соединен со схемой 19 счисления пути, в которую он посылает сигналы корректировки положения транспортного средства (корректировка пути).
В случае применения блока 7 сопровождения цели он посылает сигналы также в блок 23 сравнения параллельных путей с тем, чтобы в случае многозначности путь выбирался в качестве главного пути, который образует элемент маршрута как цель.
Корректировка счисленной позиции может осуществляться непосредственно устройством 4 приема и обработки сигналов спутника.
Управляющее вычислительное устройство 20 соединено с блоком 5 вывода; на графике показан, например, фрагмент дороги с главным путем и меткой транспортного средства. Но могут быть также предусмотрены указатели направления рекомендации по движению или вывод акустического сигнала через блок 7 сопровождения цели.
Блок 6 ввода соединен с одной стороны с вычислительным блоком 1, с другой стороны - с блоком 7 сопровождения цели, так что может осуществляться ввод сигнала цели.
Ниже на примере фиг. 3-6 более подробно рассматривается принцип действия этой конструкции.
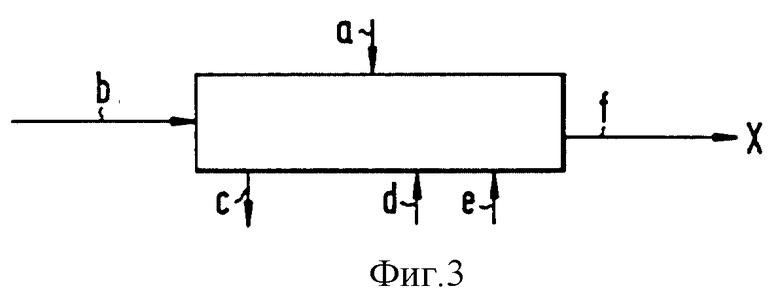
Например, фиг.3 показывает функциональную схему расчета позиции и определения состояния параллельного пути с помощью вычислительного устройства 11 обработки данных о параллельных путях. Необходимо рассчитать, например, позицию X транспортного средства на параллельном пути, который находится в области 24 движения. После пускового сигнала d вычислительное устройство 11, 12 обработки данных о параллельных путях из ЗУ 2 записи карт выбирает часть карты, которая соответствует области 24 движения (позиция а). В позиции b вводятся направление движения и проходимый транспортным средством отрезок дороги, который был установлен схемой 19 счисления пути. Если при таком расчете позиции транспортного средства вновь будет иметь место многозначность пути, то на выходе может включаться другое вычислительное устройство 11, 12 обработки данных о параллельных путях. Кроме позиции определяется еще состояние, в котором, например, было установлено фактическое соответствие направления движения и угла отклонения дороги. Далее, в информации о состоянии может быть установлен, например, коэффициент вероятности позиции транспортного средства. В информации о состоянии содержатся также данные о сроке службы параллельного пути. Данные как о позиции, так и о состоянии через выход вводятся в блок 23 сравнения параллельных путей, который на основе данных проверки на достоверность из всей имеющейся информации выводит главный путь и параллельные пути на данный момент. Например, можно также сравнить угол наклона дороги с углом наклона транспортного средства и отсюда определить главный путь. Если параллельный путь не вписывается в область движения или не соответствует более курсу счисления, то ее запись в ЗУ можно стереть через вход е. Функциональная схема может быть выполнена в виде программы для вычислительного блока 1.
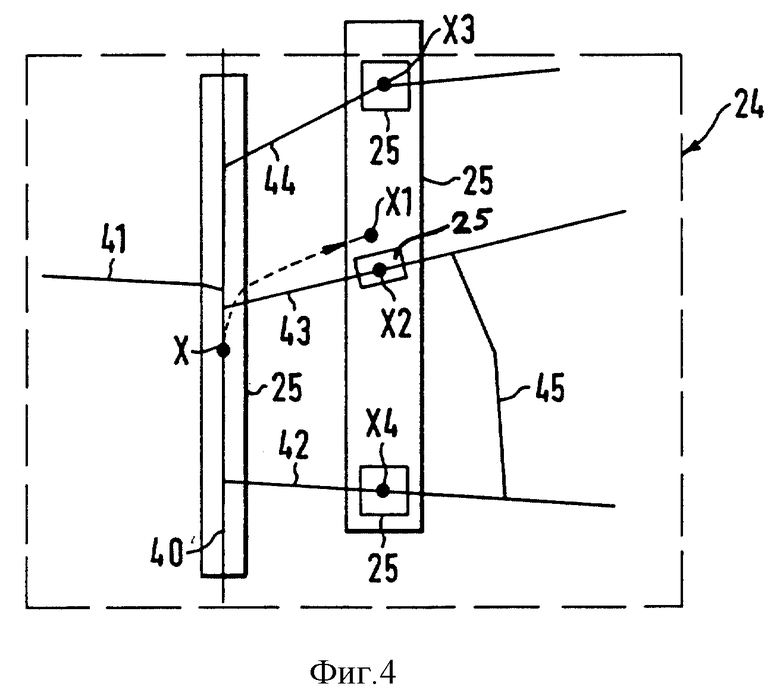
Фиг. 4 показывает область 24 движения, в которой изображены проезжаемые дороги 40-45. Предполагается, что сначала транспортное средство находится на дороге 40 в позиции X, которая в настоящий момент определена как главный путь. Если транспортное средство поворачивает направо, то на основе положительной обратной связи и погрешностей, допущенных датчиками транспортного средства при определении угла наклона и расстояния, получается позиция X1. Из-за погрешностей вокруг позиции X1, как и ранее вокруг позиции X, образуется диапазон 25 погрешностей. Диапазон 25 погрешностей может быть различным для каждой рассчитанной позиции X...X4. Величина диапазона погрешностей определена заданными допусками. Фиг. 4 показывает поэтому различные диапазоны 25 погрешностей для отдельных позиций X....X4. Большое прямоугольное поле 25 погрешностей позиции X перемещается, например, вместе с новой позицией X1 транспортного средства и изменяет при этом свою ширину. Отсюда следует, что транспортное средство фактически находится в этом поле. Поэтому новая позиция Х2 предполагается на дороге 43, которая является относительно рассчитанной позиции X1 ближайшей.
Управляющее вычислительное устройство 20 на основе угла поворота транспортного средства относительно всех дорог, образовавших аналогичный угол к прежнему главному пути 40, на параллельных путях 42, 43 и 44 устанавливает вероятные позиции X2, X3 и X4 с соответствующими новыми диапазонами 25 погрешностей. Дороги 42, 43, 44 находятся в диапазоне погрешностей позиции X1 пути. Дорога 41 образует угол поворота в противоположном направлении и поэтому более не принимается в расчет при определении позиции. Рассмотренный способ, в котором позиции параллельных путей (в данном случае Х2, X3 и X4 на дорогах 44, 43 и 42) определяются из диапазона 25 погрешностей главного пути, может применяться главным образом через нахождение параллельных путей из диапазона 25 погрешностей одного параллельного пути. Диапазон 25 погрешностей включает в себя ошибку измерения направления движения и одномерный диапазон остановок (вероятная ошибка определения расстояния) или двухмерный диапазон остановок (ошибка, допущенная при измерении принятой позиции, в поперечном направлении и расстояния). На основе проверок на достоверность из позиций X1-X4 в качестве нового главного пути выбирается позиция X2 с новым полем 25 погрешностей, для которой существует максимальная вероятность позиции транспортного средства. Затем рассчитываются позиции X3, X4 на параллельных путях 42, 44, которые учитываются опять при следующем выборе. Если в процессе одной из последующих операций установления позиции один из параллельных путей 42 или 44 должен рассматриваться как главный путь, то тогда один из двух параллельных путей следовало бы определять как новый главный путь. Для того, чтобы избежать в предельных случаях частый перескок позиции X2 транспортного средства, для оценки предусмотрен соотнесенный со временем или расстоянием гистерезис, так что определение параллельного пути как главного пути изменяется только на основе нескольких измерительных циклов или определенного пройденного расстояния.
Далее из фиг. 4 видно, что при повороте на новый главный путь 43 точка поворота на перекрестке 43, 40 может использоваться в качестве установленной корреляционной точки измерения расстояния. В качестве альтернативы для коррекции расстояния может использоваться разность X1-X2. Соответственно надо осуществить способ определения позиций Х3 и X4 параллельных путей.
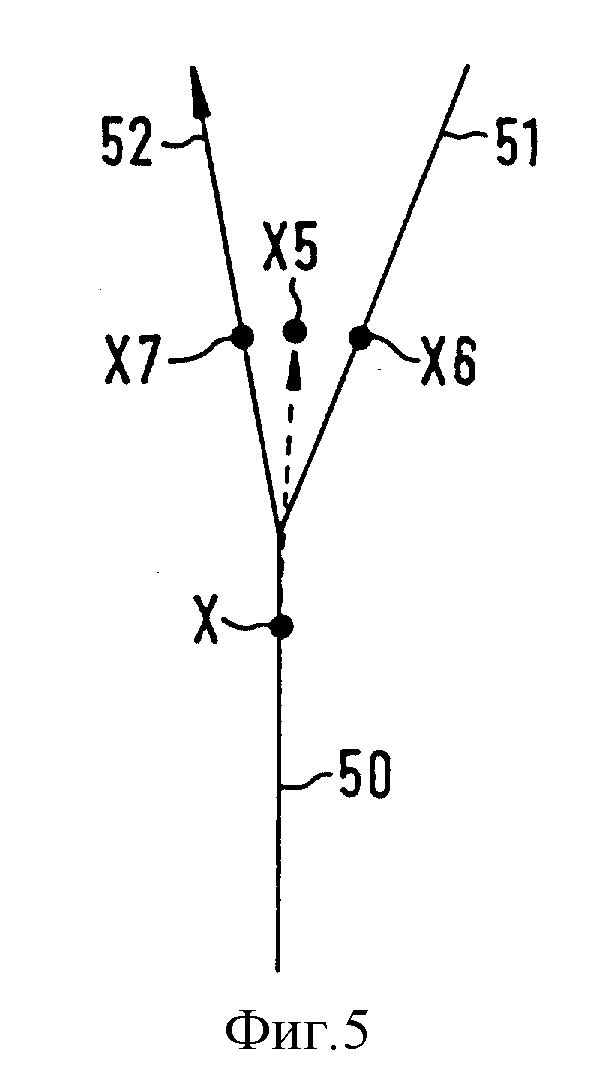
Аналогично корректировке расстояния согласно фиг. 4 можно осуществить коррекцию позиции согласно фиг. 5. Например, транспортное средство находится на главном пути 50 в позиции X. Предполагается, что главный путь 50 на развилке разделяется на два параллельных пути 51, 52. В определенный момент времени на основе счисления пути транспортное средство находилось бы в позиции X5. В силу того, что позиция X5 не означает местонахождение на дороге, то вероятные позиции X6 на параллельном пути 51 или X7 на параллельном пути 52 являются приемлемыми. При повторном определении позиции возникает, например, на основе рекомендованного маршрута в качестве цели вероятность для позиции X7 на параллельном пути 52, который рассматривается теперь как главный путь. Параллельный путь 51 считается в дальнейшем главным и рассчитывается вычислительным устройством 11, 12 обработки данных параллельных путей. На основе изменения угла с позиции X5 на позицию X7 образуется поправочное значение для определения направления, которое может быть положено в основу дальнейшего счисления пути.
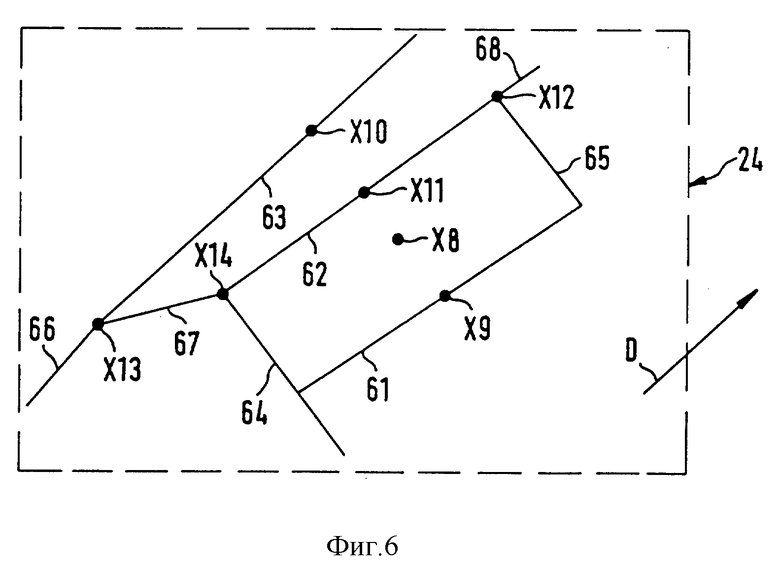
Фиг. 6 показывает третью часть карты дорог навигационной системы, в которой для корректировки счисления пути используется приемник 4 сигналов навигационной системы (например, приемник глобальной спутниковой системы радиоопределения положения судов и самолетов). Приемник спутниковой навигационной системы определяет свое положение по местонахождению нескольких навигационных спутников. Это определение позиции сопряжено также с определенной погрешностью. Эта погрешность корректируется так, как это описано в примерах фиг. 4 и 5. В поле 24 погрешностей на фиг.6 изображены участки дороги/параллельные пути 61-68. Если, например, приемник 4 глобальной спутниковой системы радиоопределения положения судов и самолетов устанавливает в качестве возможного местонахождения транспортного средства позицию X8, то дополнительно рассчитывается позиция X9 на параллельном пути 61 и позиция X10 на параллельном пути 63, если смотреть в направлении движения. Но могут быть рассчитаны также позиция X13 на параллельном пути 66, позиция X14 на параллельном пути 67 и позиция X12 на параллельном пути 68.
На основе данных проверки на достоверность позиция транспортного средства на параллельных путях 64 или 65 является невероятной и поэтому исключается. В дальнейшем из нового расчета получится, например, наибольшая вероятность для позиции X11 на параллельном пути 62, которая становится главным путем. Транспортное средство предполагается в позиции X11 и эта позиция выводится, например, на дисплей 5. Позиции X9, X10, X12, X13, X14 на первоначальных дорогах 61, 63, 68, 66, 67 анализируются с целью контроля главного пути 62. Но они на дисплее 5 не высвечиваются.
Если навигационная система соединена, например, с блоком 7 сопровождения цели, то после ввода цели через блок 6 ввода вычислительным блоком 1 осуществляется поиск определенного конечного маршрута. Конечный маршрут устанавливается так, что он рассчитывается вместе с новым главным путем 62 в качестве стартовой позиции.
Отдельные узлы навигационной системы или решающего блока 1, такие как схема 19 счисления пути, блок 21 оценки ошибок, селектор 22, вычислительное устройство 11, 12 обработки данных параллельных путей или блок 23 сравнения параллельных путей, выполнены на известных модулях, таких как усилители, компараторы или логические схемы. Они известны специалисту из используемых навигационных систем и поэтому подробно не рассматриваются. Вместо отдельных модулей можно также установить одну или несколько микроЭВМ, которые управляются соответствующей управляющей программой.
Изобретение относится к навигационным системам транспортных средств. Согласно изобретению позиция транспортного средства проверяется и корректируется по счислению пути с использованием карт. Для коррекции счисленной позиции сперва устанавливается диапазон погрешностей, определяемый допусками датчиков транспортного средства и/или погрешностью измерения навигационной системы. В этом диапазоне в расчет принимаются все дороги как множества вероятных позиций транспортного средства. Для наиболее вероятной позиции выбирается главный путь движения данного средства. Другие позиции используются в качестве параллельных путей. Если из проверок на достоверность окажется, что параллельный путь более вероятен для текущей позиции транспортного средства, чем главный путь, то этот параллельный путь будет определен как новый главный путь. Введение гистерезиса предотвращает постоянный "перескок" позиции транспортного средства между несколькими дорогами. Изобретение позволяет повысить достоверность определения положения и прогнозирования пути транспортных средств. 2 с. и 12 з.п. ф-лы, 6 ил.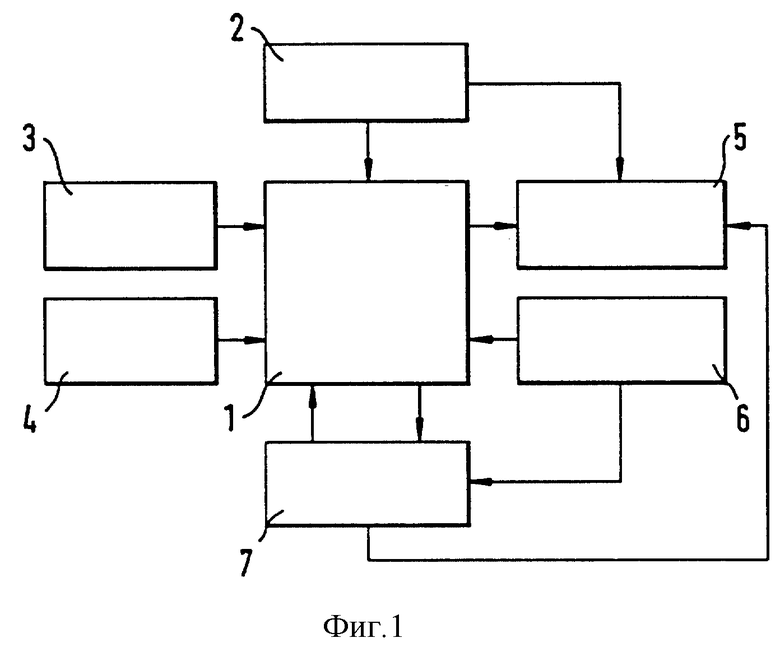
| СПОСОБ ЗАКАЛКИ СТАЛЬНЫХ ДЕТАЛЕЙ | 0 |
|
SU314806A1 |
| Механизм управления двухфонтурной кругловязальной машиной | 1972 |
|
SU471405A2 |
| US 4964052 A, 16.10.1990 | |||
| Домовый номерной фонарь, служащий одновременно для указания названия улицы и номера дома и для освещения прилежащего участка улицы | 1917 |
|
SU93A1 |
| КОНВЕЙЕРНАЯ ДОИЛЬНАЯ УСТАНОВКА | 0 |
|
SU166547A1 |

