ПРЕДПОСЫЛКИ К СОЗДАНИЮ ИЗОБРЕТЕНИЯ
1. Область техники, к которой относится изобретение
[1] Настоящее изобретение относится к навигационной системе, а именно к способу коррекции позиционной ошибки в навигационной системе, которая использует согласование с картой, чтобы обеспечить точную информацию о текущем местоположении движущегося объекта путем коррекции позиционных погрешностей с учетом определенных координат местоположения движущегося объекта, включая наземные транспортные средства, самолеты и корабли, и формы дороги (т.е. хорды), отображенной на цифровой карте.
2. Предшествующий уровень техники
[2] Существенным элементом навигационных систем является определение текущего местоположения движущегося объекта (например, наземных транспортных средств) в пределах допустимого интервала погрешности и обеспечение такой информацией водителя движущегося объекта постоянно в режиме реального времени, так как текущее местоположение движущегося объекта используется для отметки текущего местоположения подвижного объекта, обеспечения информации для управления курсом и восприятия окружающей среды по маршруту.
[3] Предоставление неточного местоположения движущегося объекта или предоставление информации о местоположении с перерывами может вызвать серьезные нарушения безопасности водителя движущегося объекта, поэтому очень важно определять текущее местоположение движущегося объекта.
[4] Навигационные системы не могут всегда обеспечивать точную информацию о текущем местоположении движущегося объекта. То есть интервал погрешности датчиков, например, гироскопа или электронного компаса, встроенных в движущийся объект, может быть значительным в зависимости от направления поворота движущегося объекта. К тому же, когда движущийся объект останавливается, он может отклониться от курса или его курс изменится, что внесет позиционные погрешности в курс движущегося объекта. Более того, измерение расстояния перемещения движущегося объекта с использованием датчика, связанного с колесом, может быть также ошибочным, так как датчик, связанный с колесом, очень чувствителен к таким внешним факторам, как давление воздуха в колесах/шинах и состояние дорожного покрытия.
[5] Другим источником информации о текущем местоположении движущегося объекта является цифровая карта, которую отражают относительно осевой линии (т.е. сплошной желтой линии). Однако во многих случаях водители движущихся объектов не едут вдоль перекрестка или осевой линии на дороге, а в результате цифровая карта сама по себе вносит погрешности. Кроме того, погрешности также вносятся, когда при вводе данных в цифровую карту отмечают местоположение движущегося объекта не в той точке. Конечно, эти погрешности следует исправить, вне всякого сомнения.
[6] В качестве попытки решить вышеуказанные проблемы в патенте Кореи №216535 (заявка №1997-24564) описан способ определения текущего местоположения движущегося объекта.
[7] Согласно этому описанию система счисления пути с использованием информации, полученной от датчиков курса и расстояния на движущемся объекте, дает текущее местоположение движущегося объекта, которое обозначают как первое местоположение, а с помощью способа согласования с картой, в котором используется согласование местоположения, первое местоположение корректируют, или передвигают на цифровой карте, и это откорректированное местоположение обозначают как второе местоположение. Далее текущее местоположение движущегося объекта определяют, используя сигнал от GPS (GPS - сокращ. от Global Positioning System (англ.) - глобальная спутниковая система определения местоположения, примеч. перевод.), и обозначают текущее местоположение в этот момент как третье местоположение. Подобно тому, как это было приведено выше, третье местоположение корректируют, или передвигают на цифровой карте, применяя способ согласования с картой с использованием согласования местоположения, и это откорректированное местоположение обозначают как четвертое местоположение. Благодаря этим четырем местоположениям получают изображения передвижения водителя движущегося объекта на коротком расстоянии. После этого сравнивают между собой сходные элементы каждого из изображений передвижения на коротком расстоянии для всех четырех местоположений и изображения дороги на цифровой карте и в качестве текущего местоположения движущегося объекта окончательно выбирают местоположение, имеющее самую высокую степень сходства.
[8] Однако вышеописанный способ фактически не использовал результат согласования с картой для отслеживания движущегося объекта. Вместо этого, для согласования текущего местоположения движущегося объекта, определенного с помощью цифровой карты, использовались в основном комбинации систем счисления пути и GPS, а именно сигналы от датчиков и глобальной спутниковой системы местоопределения (GPS). Поэтому было довольно трудно осуществить точное согласование местоположения движущегося объекта с цифровой картой.
[9] Например, в зависимости от географических особенностей местности, где находится движущийся объект, дороги иногда бывают прямыми, но иногда и извилистыми. Можно легко согласовать с цифровой картой местоположение движущегося объекта на прямой дороге, но местоположение на извилистой дорого очень трудно точно определить.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
[10] Целью изобретения является решение, по меньшей мере, вышеуказанных проблем и/или устранение вышеуказанных недостатков и обеспечение преимуществ, по меньшей мере, описанных далее.
[11] Соответственно, одной целью настоящего изобретения является решение вышеуказанных проблем путем обеспечения способа коррекции позиционной погрешности в навигационной системе, дающего возможность согласовать координаты местоположения движущегося объекта с цифровой картой.
[12] Другой целью настоящего изобретения является обеспечение способа коррекции позиционной погрешности в навигационной системе, позволяющего точно согласовать текущее местоположение движущегося объекта с хордой на цифровой карте путем определения текущего местоположения движущегося объекта, добавления к координатам местоположения поправки на смещение, полученной из предыдущего согласования с картой, чтобы уточнить координаты, и осуществления согласования с картой.
[13] Также целью изобретения является обеспечение способа коррекции позиционной погрешности в навигационной системе, в котором текущее местоположение движущегося объекта определяют путем использования принятых сигналов на базе системы счисления пути и GPS и координаты складывают с поправками на смещение по осям Х и Y, полученными из предыдущего согласования с картой, чтобы уточнить координаты текущего местоположения движущегося объекта, после чего осуществляют согласование с картой.
[14] Еще одной целью настоящего изобретения является обеспечение способа коррекции позиционной погрешности в навигационной системе, в котором используют координаты местоположения движущегося объекта для определения узла между узлами интерполяции потенциальной хорды, имеющей наиболее высокую возможность согласования на карте.
[15] Вышеизложенные и другие цели и преимущества достигнуты в способе коррекции позиционной погрешности в навигационной системе, включающем получение координат текущего местоположения движущегося объекта по информации на базе GPS/системы счисления пути; коррекцию координат текущего местоположения с использованием поправки на смещение; осуществление согласования с картой с использованием скорректированных координат текущего местоположения; вычисление отклонения поправочного угла путем получения текущего поправочного угла из результата согласования с картой; преобразование и коррекцию предыдущей поправки на смещение для текущего поправочного угла; и компенсацию поправки на смещение путем введения заданной постоянной величины в преобразованную поправку на смещение и сохранение компенсированной поправки на смещение.
[16] Другой аспект изобретения обеспечивает способ коррекции позиционной погрешности в навигационной системе, включающий получение координат текущего местоположения движущегося объекта способом, использующим GPS/систему счисления пути; коррекцию координат текущего местоположения с использованием предыдущей поправки на смещение; осуществление согласования с картой с использованием скорректированных координат текущего местоположения; и вычисление по результату согласования с картой отклонения поправочного угла и компенсированной поправки на смещение по курсу путем получения текущего поправочного угла из результата согласования с картой.
[17] Еще один аспект изобретения обеспечивает способ коррекции позиционной погрешности в навигационной системе, включающий получение координат местоположения с помощью GPS; получение потенциальных хорд в пределах заданного диапазона поиска вблизи GPS-координат; выбор среди множества узлов интерполяции на потенциальных хордах точки между узлами интерполяции с наиболее высокими возможностями; и выбор среди потенциальных хорд, включающих выбранную точку между узлами интерполяции, хорды с наиболее высокой возможностью, имеющую движущийся объект, и осуществление согласования с картой.
[18] Дополнительные преимущества, цели и признаки изобретения отчасти будут изложены в описании далее, а отчасти будут очевидны для среднего специалиста при анализе нижеследующего или будут изучены при практическом применении изобретения. Цели и преимущества изобретения могут быть воплощены и достигнуты особенно при условиях, охарактеризованных в формуле изобретения.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
[19] Изобретение будет подробно описано со ссылками на следующие чертежи, в которых одинаковые номера позиций относятся к одинаковым элементам.
[20] На фиг.1 показана блок-схема конфигурации навигационной системы в соответствии с одним примером осуществления настоящего изобретения.
[21] На фиг.2 показана схема, описывающая способ коррекции позиционной погрешности в навигационной системе в соответствии с одним примером осуществления настоящего изобретения.
[22] На фиг.3 показана графическая схема, отражающая методику вычисления поправки на смещение с использованием измененного угла согласования с картой в соответствии с одним примером осуществления изобретения.
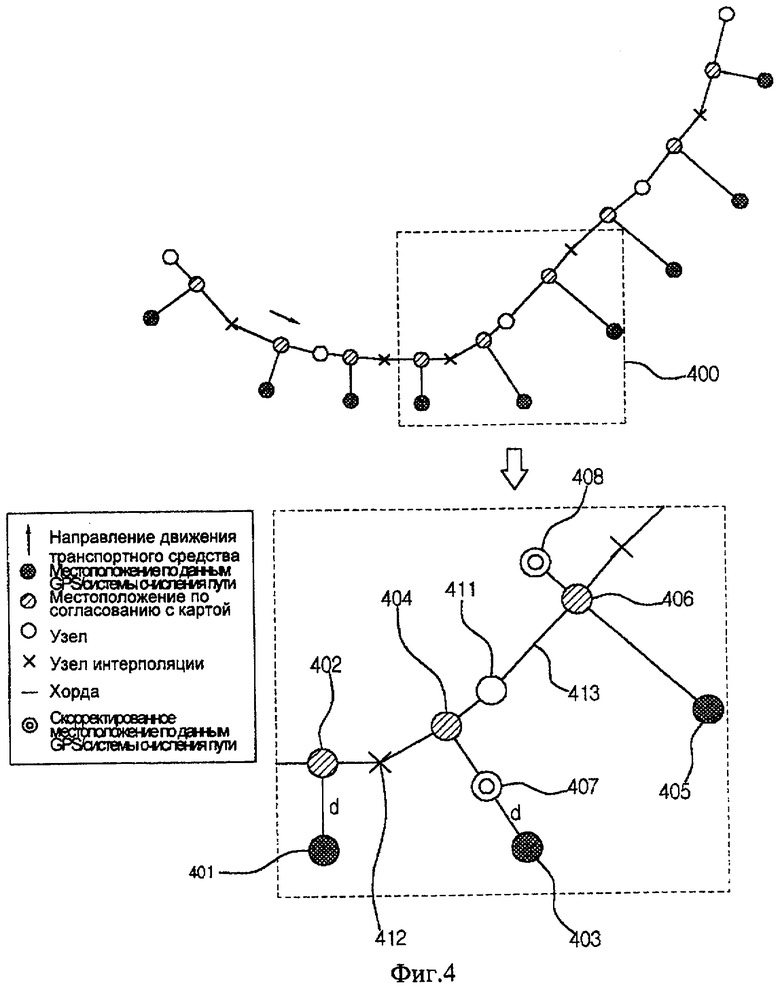
[23] На фиг.4 показана графическая схема способа коррекции координат местоположения, полученных с помощью GPS и системы счисления пути, при использовании предыдущей величины согласования с картой в соответствии с одним примером осуществления настоящего изобретения.
[24] На фиг.5 показана схема, описывающая способ согласования с картой в соответствии с одним примером осуществления настоящего изобретения.
ПОДРОБНОЕ ОПИСАНИЕ ПРЕДПОЧТИТЕЛЬНЫХ ПРИМЕРОВ ОСУЩЕСТВЛЕНИЯ ИЗОБРЕТЕНИЯ
[25] В нижеследующем подробном описании будет изложен способ коррекции позиционной погрешности в навигационной системе в соответствии с предпочтительным примером осуществления изобретения со ссылками на прилагаемые чертежи.
[26] На фиг.1 представлена схема конфигурации навигационной системы в соответствии с одним примером осуществления настоящего изобретения.
[27] Как показано на фиг.1, навигационная система включает GPS-приемник 100 для получения информации о координатах текущего местоположения движущегося объекта с помощью сигнала, передаваемого от множества спутников GPS, датчик 110 для определения скорости движения и направления поворота движущегося объекта за счет использования гироскопа и датчика скорости, встроенных в движущийся объект, запоминающее устройство 120 для хранения информации цифровой карты, информации о пути движущегося объекта и операционной программы, блок управления 130 для установления координат текущего местоположения движущегося объекта путем коррекции координат текущего местоположения, определенных с использованием выходных сигналов GPS-приемника 100 и датчика 110 в согласованном с картой виде на цифровой карте, блока управления 130, работающего в соответствии с операционной программой, хранящейся в запоминающем устройстве 120, и дисплея 140, управляемого блоком управления 130, для отображения цифровой карты и координат текущего местоположения движущегося объекта на цифровой карте.
[28] На фиг.2 проиллюстрирован способ коррекции позиционной погрешности в навигационной системе с конфигурацией, показанной на фиг.1.
[29] Прежде всего блок управления 130 принимает замеренные координаты (GPSx, GPSy) текущего местоположения движущегося объекта (S202), при этом замеренные координаты получают, используя выходные сигналы GPS-приемника 100 и датчика 110 системы счисления пути. Прибавляя замеренные координаты (GPSx, GPSy) текущего местоположения движущегося объекта к поправке на смещение, полученной из предыдущего согласования с картой, получают новые координаты текущего местоположения (S204). Поправка на смещение от предыдущего согласования с картой хранится в запоминающем устройстве 120. В данном случае поправка на смещение по согласованию с картой может быть получена из уравнений 2 и 3, которые будут пояснены далее.
[30] Эти новые скорректированные координаты текущего местоположения на шаге 204 затем согласовывают с цифровой картой, хранящейся в запоминающем устройстве 120 (S206). То есть для более точного согласования с картой координаты текущего местоположения движущегося объекта согласовывают с дорогой на цифровой карте и, соответственно, корректируют определение местоположения.
[31] Затем получают результат согласования с картой на операции 206, а именно координаты согласованного с картой местоположения движущегося объекта и направление хорды (S208).
[32] После чего по уравнению 1 вычисляют текущий поправочный угол (S210).
[Уравнение 1]
Текущий поправочный угол=arctg2{(MMx-GPSx), (MMy-GPSy)}
[33] Как показано, чтобы получить текущий поправочный угол, величину GPSx сначала вычитают из согласованной с картой величины х (ММх) движущегося объекта от направления географического севера и аналогично величину GPSy сначала вычитают из согласованной с картой величины у (ММy) движущегося объекта. Затем результирующую (х, y) умножают на arctg2. To есть направление движения объекта может изменяться в соответствии с текущим поправочным углом.
[34] После завершения вычисления поправочного угла вычисляют отклонение поправочного угла путем вычитания предыдущего согласованного с картой поправочного угла из текущего поправочного угла, полученного на операции 210 (S212). Таким образом можно установить, насколько сместилось текущее местоположение.
[35] Далее единицу заменяют постоянной К (см. ниже уравнение 2) (S214). Постоянная К является компенсирующим коэффициентом для решения о направлении, она компенсирует поправки на х- и y-смещение в направлении, противоположном движению по горизонтали (вправо/влево) от хорды, а именно (+1, -1).
[36] Если отклонение поправочного угла, вычисленное на операции 212, больше заданного угла (S216), то поправки на х- и y-смещение устанавливают в исходное состояние "0" (S218), заново начиная вычисление поправок определенного местоположения. Например, если отклонение поправочного угла больше 60°, это означает, что движущийся объект сделал левый или правый поворот, так что как поправку на х-смещение, так и поправку на y-смещение устанавливают в исходное состояние "0". Угол может быть также установлен в обратном географическому северу направлении с помощью хорды, соединяющей узлы на пути движения.
[37] Между тем, если отклонение вычисленного поправочного угла меньше заданного угла, блок управления 130 изменяет текущие координаты местоположения в левую/правую сторону хорды на цифровой карте. То есть решают, переместилось ли предыдущее правое местоположение движущегося объекта в правую сторону хорды с левой стороны или переместился ли объект в левую сторону хорды с правой стороны. В случае изменения координат текущего местоположения слева направо по хорде на цифровой карте на операции 222 меняют знак постоянной К (S220).
[38] Дополнительно решают, находится ли отклонение поправочного угла в диапазоне 0-180°. Если это так, то есть если скорректированное местоположение движущегося объекта расположено на правой стороне хорды на цифровой карте (S226), знак постоянной К меняют (S224) и, используя разницу между местоположением, согласованным с картой, и скорректированным GPS-местоположением, поправки х и y, соответствующие абсолютной поправке на расстояние, и постоянную К, получают новые поправки на х- и y-смещение (S228). Эти поправки на х- и y-смещение для координат местоположения затем сохраняют/возвращают для следующего согласования с картой.
[39] Другими словами, новые поправки на х- и y-смещение, полученные из уравнения 2, соответственно заменяют поправки для текущего местоположения движущегося объекта.
[Уравнение 2]
поправка на х-смещение=(ММх-GPSx)+K·d·sin(угол хорды+90°)
поправка на y-смещение=(ММy-GPSy)+K·d·cos(угол хорды+90°)
[40] В уравнениях d означает абсолютное поправочное расстояние, a sin(угол хорды+90°) и соs(угол хорды+90°) - текущие поправочные углы. 90° прибавляют к углу хорды, чтобы он соединял узлы от направления географического севера.
[41] Далее приводится метод вычисления местоположения, полученного с помощью GPS/системы счисления пути, и поправки на смещение с использованием согласования с картой.
[42] Как показано на фиг.3, когда объект движется в каком-то направлении в пределах зоны поиска 300 по карте определения местоположения, вычисляют поправки на х- и y-смещение, проходя узел интерполяции 322 на хорде 323 между узлами 321.
[43] А именно, получают координаты предыдущего/текущего местоположения 301 и 302, определенные с помощью GPS/системы счисления пути, и координаты предыдущего/текущего местоположения 311 и 312, определенные путем согласования с картой, и в качестве абсолютного поправочного расстояния указывают кратчайшее расстояние (d) между координатами местоположения, определенными с помощью GPS/системы счисления пути, и координатами местоположения, определенными путем согласования с картой. Здесь согласованные с картой координаты предыдущего местоположения 311 получают, используя координаты предыдущего местоположения 301, определенные с помощью GPS/системы счисления пути, и абсолютное поправочное расстояние, а согласованные с картой координаты текущего местоположения 312 получают, используя координаты текущего местоположения 302, определенные с помощью GPS/системы счисления пути, и абсолютное поправочное расстояние.
[44] Короче говоря, как показано на фиг.3(а) и 3(b), если первое местоположение 301, определенное с помощью GPS/системы счисления пути, и первое согласованное с картой местоположение 311 представить в декартовой системе координат, то они соответствуют предыдущей согласованной с картой поправке на смещение (х1, y1) 331. Аналогично, если новое согласованное с картой второе местоположение 302, определенное с помощью GPS/системы счисления пути, и второе согласованное с картой местоположение 312 представить в декартовой системе координат, то они соответствуют поправке на смещение (х2, y2) 332, которую получают из предыдущего согласования с картой с использованием текущего поправочного угла. Здесь значение поправки на смещение из предыдущего согласования с картой (х1, y1) 331 совпадает с точкой 311, а новая поправка на смещение (х2, y2) 332 совпадает с точкой 312.
[45] В этом случае, как показано на фиг.3b, когда получают поправки на смещение 331 и 332, угол между направлением географического севера и поправкой на смещение 331 обозначен как θ1, а угол между направлением географического севера и поправкой на смещение 332 обозначен как θ2.
[46] Тогда сумму новых GPS-координат и абсолютного поправочного расстояния (d), полученного ранее, обозначают как новое местоположение, определенное с помощью GPS/системы счисления пути. На фиг.4 показаны местоположения, определенные с помощью GPS/системы счисления пути и скорректированные с использованием предыдущего согласования с картой в пределах зоны поиска 400 во время движения объекта. Используя координаты местоположений 401, 403 и 405, определенные с помощью GPS/системы счисления пути, и согласованные с картой значения 402, 404 и 406, можно получить новое значение 407, определенное с помощью GPS/системы счисления пути, которое получают за счет прибавления нового значения 403, определенного с помощью GPS/системы счисления пути, к предыдущему абсолютному поправочному расстоянию(d). Точка 408 может быть получена аналогичным образом.
[47] На фиг.4 в точках 403 и 407, в которых направление меняется слева направо и имеющих хорду в качестве линии отсчета, знак постоянной (К) не меняется на (+1). Однако знак постоянной (К) меняется на (-1) в точке 408, чтобы изменить направление справа налево.
[48] Абсолютное поправочное расстояние (d) получают из уравнения 3.
[Уравнение 3]

[49] Здесь x1 - ранее согласованная с картой поправка на х - смещение; y1 - ранее согласованная с картой поправка на y-смещение; х2 - преобразованная поправка на х-смещение из предыдущего согласования с картой с использованием текущего поправочного угла; и y2 - преобразованная поправка на y-смещение из предыдущего согласования с картой с использованием текущего поправочного угла, где х2=d·sin(θ2) и y2=d·cos(θ2).
[50] При этом (х, y) нового значения GPS могут быть также получены из уравнения 3 с использованием поправочного угла θ2 и абсолютного поправочного расстояния (d), полученного ранее.
[51] Чтобы получить такие поправки на смещение, поправки на смещение (х, y) вычисляют отдельно, как показано в уравнении 4.
[52] [Уравнение 4]
поправка на х-смещение=(ММх-GPSx)+d·sin(θ2)
поправка на y-смещение=(ММy-GPSy)+d·cos(θ2)
[53] Если к этим поправкам на х- и y-смещения в уравнении 4 прибавить постоянную (К), то получится уравнение 2. Здесь θ2 представляет собой сумму угла хорды и 90°.
[54] Используя поправки на смещение, полученные из уравнения 4, осуществляют согласование с картой и в отношении следующего согласования с картой кратчайшее расстояние между исходным значением GPS перед его вводом и хордой опять обозначают как абсолютное поправочное расстояние (d).
[55] Как показано на фиг.3 и 4, иногда позиционные погрешности бывают, даже когда движущийся объект (т.е. транспортное средство) перемещается по дороге без всяких проблем. Однако способ коррекции позиционной погрешности по изобретению обеспечивает точное согласование с картой на соединении дорог, даже когда позиционные погрешности вносятся устройствами определения местоположения в навигационной системе, или когда цифровая карта сама по себе имеет погрешности, или когда поступает неточная информация о местоположении в связи с тем, что сплошная желтая линия на дороге используется в качестве базиса отсчета независимо от действительного движения транспортного средства.
[56] В общем, согласно способу коррекции позиционной погрешности в навигационной системе по настоящему изобретению текущее определение местоположения движущегося объекта корректируют по ранее согласованной с картой поправке на смещение и текущее местоположение движущегося объекта согласуют с хордой на цифровой карте. Поэтому можно осуществлять точное согласование с картой независимо от возможных погрешностей в определении местоположения на извилистых дорогах. Кроме того, даже если на самой цифровой карте обнаруживаются погрешности, а движущийся объект фиксируют вблизи центральной линии (т.е. сплошной желтой линии) по-иному, нежели это имеет место при действительном движении объекта, способ по настоящему изобретению позволяет точно согласовать движущийся объект с хордой на цифровой карте.
[57] На фиг.5 показан алгоритм согласования с картой навигационной системы в соответствии с другим примером осуществления настоящего изобретения.
[58] Согласно фиг.5 определение местоположения осуществляют, используя информацию от GPS и системы счисления пути (S502), а используя устройство определения местоположения, получают (S504) потенциальные хорды в пределах некоторой зоны поиска вблизи определяемого местоположения. В этом примере осуществления между хордами существуют узлы интерполяции.
[59] Затем получают узел между узлами интерполяции в пределах каждой потенциальной хорды (S506) и получают информацию о точке с кратчайшим расстоянием до каждого узла интерполяции на потенциальных хордах (S508), а основываясь на этой информации, вычисляют (S510) вероятности согласования с картой для потенциальных хорд.
[60] Среди точек между проанализированными узлами интерполяции выбирают точку между узлами интерполяции с наиболее высокой возможностью (S512) и включают выбранную точку между узлами интерполяции в список кандидатов (S514).
[61] Далее, основываясь на точке между узлами интерполяции, имеющей наиболее высокую возможность для каждой потенциальной хорды, вычисляют одну потенциальную хорду, имеющую наиболее высокую возможность для согласования с картой (S516). Наконец, в качестве согласованного с картой значения указывают (S518) точку между узлами интерполяции на потенциальной хорде, имеющую наиболее высокую возможность для согласования с картой.
[62] По сути дела, путем использования координат местоположения движущегося объекта осуществляют поиск точки между узлами интерполяции на хорде с наиболее высокой возможностью для согласования с картой. Поэтому вне зависимости от извилистости дороги можно эффективно осуществлять согласование с картой по узлам интерполяции на хорде с наиболее высокой возможностью для согласования с картой.
[63] Хотя изобретение показано и описано по отношению к определенным предпочтительным примерам осуществления, специалистам будет понятно, что могут быть сделаны различные изменения в форме и деталях без отступления от сущности и объема изобретения, изложенного в формуле изобретения. Например, настоящее изобретение может также применяться для самолетов, судов или переносных «карманных» компьютеров и ноутбуков, имеющих встроенную навигационную систему.
[64] Вышеизложенные примеры осуществления и преимущества являются только показательными и не созданы как ограничивающие настоящее изобретение. Настоящий подход может быть без труда применен к другим типам аппаратов. Описание изобретения предназначено для иллюстрации и не ограничивает объем формулы изобретения. Специалистам будут очевидны многие изменения, модификации и отклонения. Функциональные признаки в формуле изобретения предназначены для обобщения структур, описанных здесь в качестве выполняющих указанную функцию, и не только структурных эквивалентов, но и эквивалентных структур.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ДВИЖУЩЕГОСЯ ОБЪЕКТА В НАВИГАЦИОННОЙ СИСТЕМЕ | 2003 |
|
RU2311690C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ОТНОСИТЕЛЬНЫХ УХОДОВ НАВИГАЦИОННЫХ СИСТЕМ ПОДВИЖНЫХ НОСИТЕЛЕЙ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2012 |
|
RU2504733C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ПОДВИЖНЫХ ОБЪЕКТОВ И КОМПЛЕКСИРОВАННАЯ НАВИГАЦИОННАЯ СИСТЕМА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2009 |
|
RU2395061C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПРОСТРАНСТВЕННЫХ КООРДИНАТ ПОДВИЖНЫХ ОБЪЕКТОВ И КОМПЛЕКСНАЯ НАВИГАЦИОННАЯ СИСТЕМА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2010 |
|
RU2443978C1 |
| АВТОМАТИЗИРОВАННАЯ СИСТЕМА НАВИГАЦИИ И ТОПОПРИВЯЗКИ | 2010 |
|
RU2439497C1 |
| Астроинерциальная навигационная система с коррекцией по гравитационному полю Земли | 2023 |
|
RU2820600C1 |
| СПОСОБ ПОВЫШЕНИЯ ТОЧНОСТИ МЕСТООПРЕДЕЛЕНИЯ НАЗЕМНОГО ПОДВИЖНОГО ОБЪЕКТА И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2015 |
|
RU2638358C2 |
| СПОСОБ НАЧАЛЬНОГО ОРИЕНТИРОВАНИЯ ГИРОСКОПИЧЕСКОЙ НАВИГАЦИОННОЙ СИСТЕМЫ ДЛЯ НАЗЕМНЫХ ПОДВИЖНЫХ ОБЪЕКТОВ | 2016 |
|
RU2617147C1 |
| СПОСОБ АВТОМАТИЗИРОВАННОГО ОПРЕДЕЛЕНИЯ НАВИГАЦИОННО-ТОПОГЕОДЕЗИЧЕСКИХ ПАРАМЕТРОВ | 2010 |
|
RU2431803C1 |
| ГИРОСКОПИЧЕСКАЯ НАВИГАЦИОННАЯ СИСТЕМА ДЛЯ ПОДВИЖНЫХ ОБЪЕКТОВ | 2006 |
|
RU2308681C1 |



Изобретение относится к измерительной технике, а именно к технике коррекции позиционной погрешности в навигационных системах. Технический результат - повышение точности определения координат движущегося объекта. Для достижения данного результата выполняют следующие операции: определяют координаты текущего местоположения движущегося объекта на основе GPS/системы счисления пути; осуществляют коррекцию текущих координат с использованием поправки на смещение; осуществляют согласование с картой на основе использования скорректированных текущих координат; вычисляют отклонения поправочного угла на основе измерения текущего поправочного угла. Затем осуществляют преобразование и коррекцию координат подвижного объекта на основе учета угла предыдущей поправки на смещение. 4 н. и 12 з.п. ф-лы, 5 ил.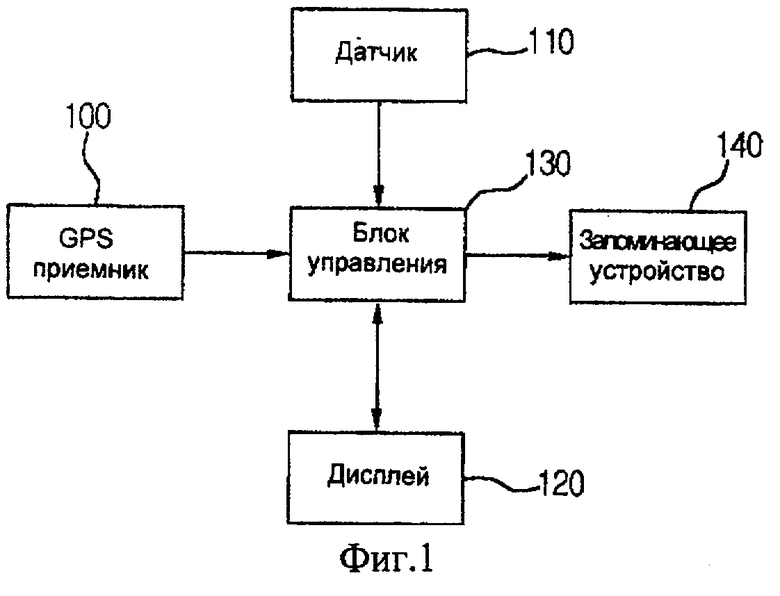
получения координат текущего местоположения движущегося объекта на основе информации GPS/системы счисления пути;
коррекции координат текущего местоположения с использованием поправки на смещение;
осуществления согласования с картой с использованием скорректированных координат текущего местоположения;
вычисления отклонения поправочного угла путем получения текущего поправочного угла из результата согласования с картой;
преобразования и коррекции предыдущей поправки на смещение по текущему поправочному углу и компенсации поправки на смещение путем введения заданной постоянной в преобразованную поправку на смещение и хранение скомпенсированной поправки на смещение.
поправка на х-смещение=(MMх-GPSx)+d·sin(угол хорды+90°) поправка на y - смещение=(MMy-GPSy)+d*cos(угол хорды+90°), где GPSx и GPSy - координаты текущего местоположения движущегося объекта по оси х и оси y; MMх и MMy - согласованные с картой координаты местоположения по оси х и оси y, полученные путем согласования GPSx и GPSy с картой; и d - абсолютное поправочное расстояние, которое является расстоянием по прямой между координатами текущего местоположения и согласованным с картой положением хорды.
поправка на х-смещение=(MMх-GPSx)+K*d*sin(угол хорды=90°) поправка на y - смещение=(MMy-GPSy)+K*d*cos(угол хорды=90°).
 где x1 - ранее согласованная с картой поправка на х-смещение; y - ранее согласованная с картой поправка на y-смещение; х2 - преобразованная поправка на х-смещение из предыдущего согласования с картой с использованием текущего поправочного угла и y2 - преобразованная поправка на y-смещение из предыдущего согласования с картой с использованием текущего поправочного угла.
где x1 - ранее согласованная с картой поправка на х-смещение; y - ранее согласованная с картой поправка на y-смещение; х2 - преобразованная поправка на х-смещение из предыдущего согласования с картой с использованием текущего поправочного угла и y2 - преобразованная поправка на y-смещение из предыдущего согласования с картой с использованием текущего поправочного угла.получения координат текущего местоположения движущегося объекта с использованием GPS/системы счисления пути;
коррекции координат текущего местоположения с использованием предыдущей поправки на смещение;
осуществления согласования с картой с использованием скорректированных координат текущего местоположения;
вычисления отклонения поправочного угла по результату согласования с картой и скомпенсированной поправки на смещение по направлению движения путем получения текущего поправочного угла по результату согласования с картой.
вычисления угла отклонения путем получения поправочного угла по результату согласования с картой после осуществления согласования с картой;
преобразования и коррекции предыдущей поправки на смещение с учетом текущего поправочного угла и вычисления поправки на смещение путем компенсации поправки на смещение за счет введения в преобразованную поправку на смещение заданной постоянной, противоположной направлению коррекции, и хранения скомпенсированной поправки на смещение.
получения координат текущего местоположения транспортного средства посредством сигнала GPS и датчиков, установленных в транспортном средстве;
коррекции координат текущего местоположения транспортного средства с использованием предыдущих поправок на х- и y-смещение и осуществления согласования с картой по скорректированным значениям;
вычисления текущего поправочного угла путем получения согласованного с картой местоположения транспортного средства и угла наклона хорды;
вычисления отклонения поправочного угла между текущим поправочным углом и по ранее согласованным с картой поправочным углом и определения, является ли отклонение поправочного угла меньшим заданного угла;
установки на «0» поправок на х- и y-смещение, если отклонение поправочного угла не меньше заданного угла;
и хранения вычисленных поправок на х- и y-смещение.
получения координат, определенных с помощью GPS;
получения потенциальных хорд в пределах заданной зоны поиска вблизи координат местоположения, определенных с помощью GPS;
выбора точки между узлами интерполяции с наиболее высокими возможностями среди множества узлов интерполяции на потенциальных хордах и выбора хорды, с наиболее высокой возможностью имеющей движущийся объект, среди потенциальных хорд, включающих выбранную точку между узлами интерполяции, и осуществления согласования с картой.
| ЭРЛИФТ ЗЕМСНАРЯДА | 1965 |
|
SU216535A1 |
| DE 10206228 A1, 04.09.2003 | |||
| JP 2003114272 А, 18.04.2003 | |||
| ИЗДЕЛИЕ, ГЕНЕРИРУЮЩЕЕ АЭРОЗОЛЬ, С РЕЗЕРВУАРОМ ДЛЯ ЖИДКОСТИ С НЕСКОЛЬКИМИ ОТДЕЛЕНИЯМИ | 2021 |
|
RU2827953C1 |
| DE 10146333 А1, 02.05.2002 | |||
| US 6041280 А, 21.03.2000 | |||
| ПРИЕМНИК СИГНАЛОВ СИСТЕМЫ GPS И СПОСОБ ОБРАБОТКИ СИГНАЛОВ СИСТЕМЫ GPS | 1996 |
|
RU2236692C2 |
| Ботуз С.П | |||
| Позиционные системы программного управления подвижными объектами | |||
| М | |||
| ИПРЖ "Радиотехника", 1998, с.28. | |||

