Область техники, к которой относится изобретение
Настоящее изобретение относится к навигационной системе, способу штурманского сопровождения движения и к компьютерной программе с программным кодом для осуществления такого способа.
Уровень техники
Навигационные системы для штурманского сопровождения движения известны в различных вариантах их исполнения. Подобные системы применяются, прежде всего в автомобилях, для вычисления маршрута до желаемого места назначения, осуществляемого после ввода соответствующей информации о месте назначения и для передачи водителю навигационной информации о дорогах и поворотах. При движении по дорогам (улицам) такое ведение по маршруту, или штурманское сопровождение, осуществляется посредством оцифрованной улично-дорожной сети.
Недостаток известных навигационных систем заключается в том, что при нахождении в стороне от оцифрованной улично-дорожной сети (например, за городом или в стороне от дорог, в неполностью оцифрованных районах, на парковочных площадках) полноценное штурманское сопровождение невозможно. В подобном случае известные навигационные системы определяют ближайший к текущему местоположению пользователя участок дороги, в том числе возможную "точку входа" для въезда или попадания на дорогу, и передают водителю соответствующую навигационную информацию, в частности прямую (кратчайшую) линию, ведущую к точке входа. Такой метод, называемый также "навигацией по точкам входа", не учитывает возможного наличия на соответствующем пути движения непреодолимых препятствий (например, водных преград, железнодорожных путей, непроезжих участков местности, зданий). Отсюда возникает та проблема, что водителю может быть предложен непроходимый или труднопроходимый маршрут.
Из публикации ЕР 1442271 В1 известен способ штурманского сопровождения движения в некотором районе в отсутствие известной для этого района картографической информации или информации о маршрутах. При этом в отношении по меньшей мере двух различных точек пути выдается информация о направлениях и расстояниях. На основании этой информации водитель должен (самостоятельно) выбрать благоприятный для него маршрут или маршрут без препятствия.
Из публикации DE 10146115 В4 известен способ штурманского сопровождения движения, предусматривающий на бездорожной местности автоматическое переключение с режима навигации на основе оцифрованных дорожных карт на режим векторной навигации. В режиме векторной навигации указываются расстояние до точки пути по прямой линии и направление на эту точку.
Раскрытие изобретения
Задача настоящего изобретения заключается в том, чтобы предложить усовершенствованное решение по штурманскому сопровождению движения, в частности движения автомобиля на бездорожной местности.
Эта задача решается признаками независимого пункта формулы изобретения. Предпочтительные варианты осуществления изобретения охарактеризованы в зависимых пунктах формулы.
Объектом изобретения является навигационная система. Предлагаемая в изобретении навигационная система содержит устройство для предоставления картографической информации (обеспечения картографической информацией) и вычислительное устройство для выработки по меньшей мере одного вида навигационной информации, используемой для штурманского сопровождения движения. При этом вычислительное устройство выполнено с возможностью построения для географического района сетки, состоящей из узловых точек, и определения, посредством предоставленной картографической информации, параметров движения для перемещений между узловыми точками сетки. При этом параметр движения относится к характеристике движения от одной узловой точки сетки до соседней с ней узловой точки сетки. Вычислительное устройство выполнено также с возможностью нахождения, посредством указанных параметров движения, пути движения через несколько узловых точек сетки и выработки, на основании найденного пути движения, по меньшей мере одного вида навигационной информации.
Объектом изобретения является также способ штурманского сопровождения движения. При осуществлении предлагаемого в изобретении способа для географического района строят сетку, состоящую из узловых точек, и посредством картографической информации определяют параметры движения для перемещений между узловыми точками сетки. При этом параметр движения относится к характеристике движения от одной узловой точки сетки до соседней с ней узловой точки сетки. Далее, посредством указанных параметров движения находят путь движения через несколько узловых точек сетки и на основании найденного пути движения вырабатывают по меньшей мере один вид навигационной информации, используемой для штурманского сопровождения движения.
Предлагаемые в изобретении навигационная система и способ позволяют реализовать улучшенное штурманское сопровождение движения для неполностью оцифрованной территории или для территории, находящейся в стороне от известной или оцифрованной улично-дорожной или маршрутной сети. Наложение географической сетки на географический район (т.е. на соответствующую картографическую информацию) и определение параметров движения для перемещений между отдельными узловыми точками сетки позволяет найти среди множества путей движения (возможных и невозможных), задаваемых узловыми точками сетки, благоприятный или оптимальный путь.
Предлагаемые в изобретении навигационная система и способ в особенности подходят для штурманского сопровождения движения транспортного средства, преимущественно автомобиля. При этом исключается возможность предложения водителю транспортного средства или пользователю навигационной системы, маршрута, проходящего через непреодолимое препятствие. Также изобретение позволяет более реалистично оценивать расстояния и время движения в неоцифрованном или плохо оцифрованном районе.
В предпочтительном варианте осуществления изобретения навигационная система также содержит устройство определения местоположения для определения текущего географического местоположения. При этом текущее местоположение может учитываться при нахождении пути движения.
В еще одном предпочтительном варианте осуществления изобретения вычислительное устройство выполнено с возможностью учета нескольких возможных пунктов назначения и нахождения, посредством указанных параметров движения, пути движения до одного из этих возможных пунктов назначения. Подобный подход может использоваться, например, применительно к случаю, когда автомобиль находится на бездорожной местности, а система ищет наиболее благоприятный или простейший путь до (любой) точки входа, в которой транспортное средство сможет выехать на дорогу оцифрованной улично-дорожной сети. Использование параметров движения позволяет избежать ситуации, в которой водителю может быть предложен маршрут до подобной точки входа, пусть и кратчайший, но пролегающий через препятствие, например водную преграду или железнодорожную линию.
В еще одном предпочтительном варианте осуществления изобретения вычислительное устройство выполнено с возможностью построения сетки с нерегулярным растром, вследствие чего на различных участках сетки значения ширины ее ячеек, измеряемой между ее узловыми точками, различны. Благодаря этому существует возможность гибкой адаптации сетки к соответствующим условиям географического района. Например, географический район может иметь как однородные, так и неоднородные участки местности, например с мелкими и/или многочисленными препятствиями. И только для таких участков с высокой плотностью данных может быть предусмотрена относительно малая ширина ячеек сетки, позволяющая обеспечить быстрое и надежное штурманское сопровождение движения.
Гибкая адаптация сетки к тому или иному географическому району обеспечивается в еще одном предпочтительном варианте осуществления изобретения за счет того, что вычислительное устройство выполнено с возможностью перемещения узловых точек сетки. Этот подход может использоваться, например, при наличии препятствия в области между двумя узловыми точками сетки.
Что касается параметра движения, относящегося к характеристике перемещений между отдельными узловыми точками географической сетки, т.е. отражает характеристику или классификацию последних, в качестве такового могут использоваться различные величины или факторы. В предпочтительном случае параметр движения относится к затрате времени, затрате сил, затрате энергии при движении между двумя узловыми точками сетки, к расстоянию между двумя узловыми точками сетки и/или к невозможности движения между двумя узловыми точками сетки.
В еще одном предпочтительном варианте осуществления изобретения вычислительное устройство выполнено с возможностью нахождения, перед построением географической сетки, прямой соединительной трассы, проходящей между первым и вторым местоположениями, и определения наличия препятствия на этой прямой соединительной трассе. Если на прямой соединительной трассе (прямая, или кратчайшая, линия между двумя точками) препятствия отсутствуют, то от построения сетки и нахождения пути движения можно отказаться, благодаря чему штурманское сопровождение движения может осуществляться относительно просто и быстро.
В еще одном предпочтительном варианте осуществления изобретения вычислительное устройство выполнено с возможностью построения первой сетки и нахождения первого пути движения и выполняемого на их основании построения второй сетки и нахождения второго пути движения. Первая сетка имеет большую ширину ячеек между соответствующими узловыми точками, чем вторая сетка. Это решение создает возможность уточнения, или оптимизации, (примерного) пути движения, который сначала был найден с помощью грубой первой сетки, что позволяет при необходимости еще более повысить качество штурманского сопровождения. Подобное применение иерархически организованных сеток при необходимости может повторяться несколько раз, позволяя последовательно уточнять возможный путь движения.
Объектом изобретения является также компьютерная программа с программным кодом для осуществления описанного выше способа навигации при выполнении компьютерной программы на компьютере. Подобный программный код записан, например, на машиночитаемом носителе информации.
Краткое описание чертежей
Ниже изобретение рассматривается подробнее на примерах его осуществления, поясняемых чертежами, на которых показано:
на фиг.1 - структурная схема навигационной системы для транспортного средства,
на фиг.2 - блок-схема осуществления способа навигации для штурманского сопровождения движения,
на фиг.3 - схематичное изображение географического района с наложенной на улично-дорожную сеть сеткой, приведенное для иллюстрации вышеупомянутого способа навигации, и
на фиг.4-7 - дополнительные схематичные изображения вышеупомянутого географического района с наложенной на улично-дорожную, сеть сеткой, приведенные для иллюстрации других форм осуществления способа навигации.
Осуществление изобретения
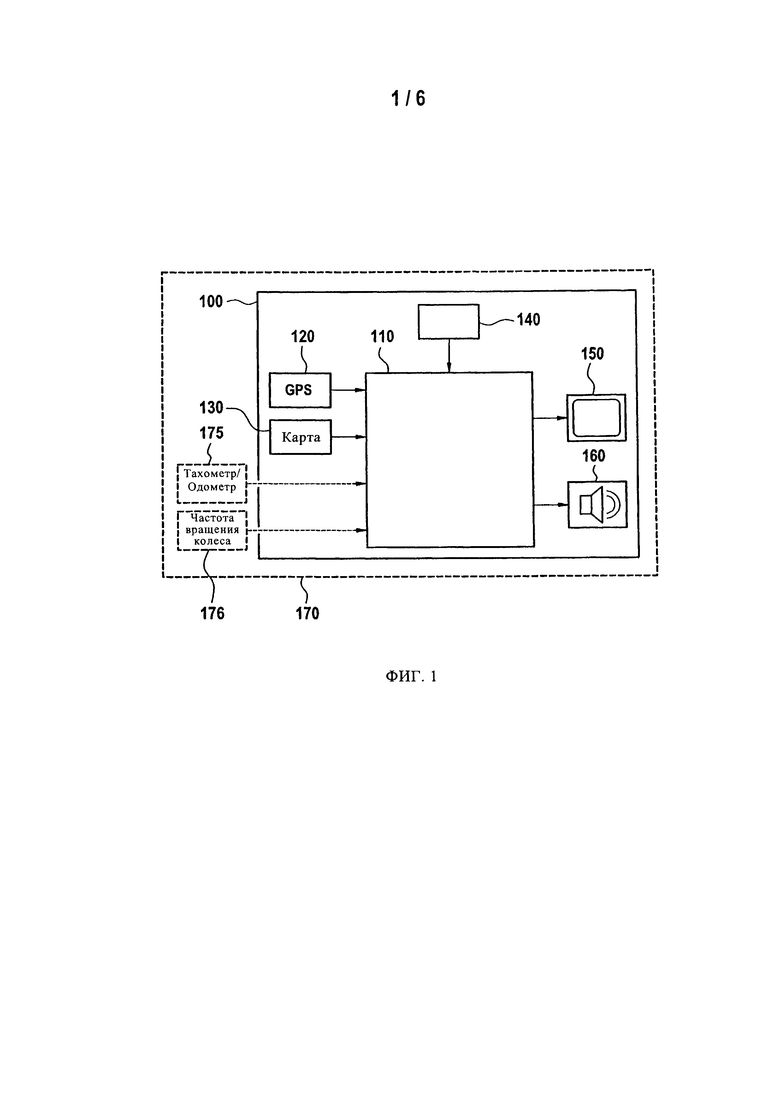
На фиг.1 показана структурная схема навигационной системы 100, которая может применяться для штурманского сопровождения движения транспортного средства 170. Транспортное средство представляет собой, например, автомобиль 170, в котором навигационная система 100 установлена в качестве штатного (несъемного) оборудования. Навигационная система 100 содержит устройство 110 для обработки и анализа данных, которое ниже называется вычислительным устройством 110. Вычислительное устройство 110 связано с другими устройствами навигационной системы 100 и автомобиля 170, а также выполнено с возможностью приема входных сигналов и выдачи выходных сигналов, как это показано на фиг.1 стрелками.
Одним из указанных устройств навигационной системы 100 является приемник 120 для приема навигационного сигнала, например GPS-сигнала (сигнала глобальной системы позиционирования GPS), с помощью которого можно определять текущее географическое местоположение автомобиля 170. Кроме того, навигационная система 100 содержит устройство 130 для предоставления картографической информации, или цифровой карты. Этим устройством 130 может быть, например, запоминающее устройство, в котором хранится картографическая информация. Также устройство 130 может быть предусмотрено в виде считывающего устройства, в которое может вставляться носитель информации, например карта памяти или флэш-карта с картографической информацией. Что касается картографической информации, то помимо данных об оцифрованной улично-дорожной сети она может включать в себя и дополнительную информацию о районах, находящихся за пределами оцифрованной улично-дорожной сети. К этой дополнительной информации относятся, например, сведения о подъемах и спусках, а также препятствиях, таких как железнодорожные линии, водоемы и реки, лесные участки местности, ущелья, контуры зданий и т.д.
Кроме того, навигационная система 100 содержит устройство 140 ввода, устройство 150 индикации и громкоговоритель 160. С помощью устройства 140 ввода, имеющего, например, органы управления, в частности кнопки управления, пользователь, или водитель автомобиля 170, может ввести соответствующий пункт назначения, т.е. конечный пункт поездки, а также определить другие установки и параметры для поиска маршрутов и штурманского сопровождения. Устройство 150 индикации, посредством которого соответствующая навигационная информация может отображаться визуально, выполнено, например, в виде дисплея. При этом также имеется возможность выполнения устройства 150 индикации в виде сенсорного дисплея, с помощью которого водитель может выбирать или задавать конечный пункт поездки, что позволяет отказаться от использования отдельного устройства 140 ввода, изображенного на фиг.1. Громкоговоритель 160 служит для звукового воспроизведения навигационной информации. Громкоговоритель 160, как это показано на фиг.1, может быть компонентом навигационной системы 100 или же автомобиля 170 либо его музыкальной системы.
Кроме того, навигационная система 100, или ее вычислительное устройство 110, может быть соединена, как это показано на фиг.1 штриховыми стрелками, с другими устройствами автомобиля 170. Таковыми могут быть, например, устройство 175 для определения скорости транспортного средства (тахометр) или пройденного расстояния (одометр, или счетчик пройденного пути), а также датчик 176 частоты вращения колеса. Использование устройств 175, 176 или их сигналов позволяет при необходимости более надежно осуществлять навигационную поддержку при движении транспортного средства, а также заполнять информационные пробелы в ситуациях, в которых прием навигационного сигнала приемником 120 невозможен (например, при движении в тоннеле или по тесным улицам центра города).
На основании пункта навигационного назначения, введенного посредством устройства 140 ввода, а также передаваемых устройствами 120, 130, 175, 176 сигналов и данных (информации о местоположении и движении) вычислительное устройство 110 может рассчитать для автомобиля 170 соответствующий маршрут и на основе этого маршрута генерировать соответствующую навигационную информацию и инструкции для штурманского сопровождения движения, которые могут визуального отображаться на устройстве 150 индикации и/или акустически воспроизводиться через громкоговоритель 160. Если соответствующий маршрут между исходным пунктом и пунктом назначения относится к пути, проходящему только по дорогам оцифрованной улично-дорожной сети (хранящейся в устройстве 130 или предоставляемой им), то вычислительное устройство 110 использует при этом обычные методы поиска маршрута и штурманского сопровождения.
Если же поиск маршрута относится (по меньшей мере частично) к территории, находящейся в стороне от оцифрованной улично-дорожной или маршрутной сети или к неполностью или плохо оцифрованной территории, вычислительное устройство 110 позволяет осуществлять поиск (прокладку) маршрута при помощи представленного на фиг.2 способа, предусматривающего использование географической сетки. Применение таких осуществляемых по сетке методов поиска маршрута и штурманского сопровождения позволяет находить благоприятный, или оптимальный, для автомобиля 170 маршрут, не направляя автомобиль 170 по пути движения к непреодолимому препятствию или через такое препятствие. Кроме того, таким образом можно реалистичнее оценивать расстояние или время в пути в неоцифрованном или плохо оцифрованном районе.
Для уяснения сущности представленного на фиг.2 способа навигации следует исходить, прежде всего, из необходимости прокладки на бездорожной местности или в районе, находящемся в стороне от оцифрованной улично-дорожной сети, маршрута между первым местоположением и вторым местоположением. Кроме того, первым местоположением является определяемое с помощью приемника 120 текущее географическое местоположение автомобиля 170 (исходный пункт), а вторым местоположением - пункт назначения, задаваемый посредством устройства 140 ввода.
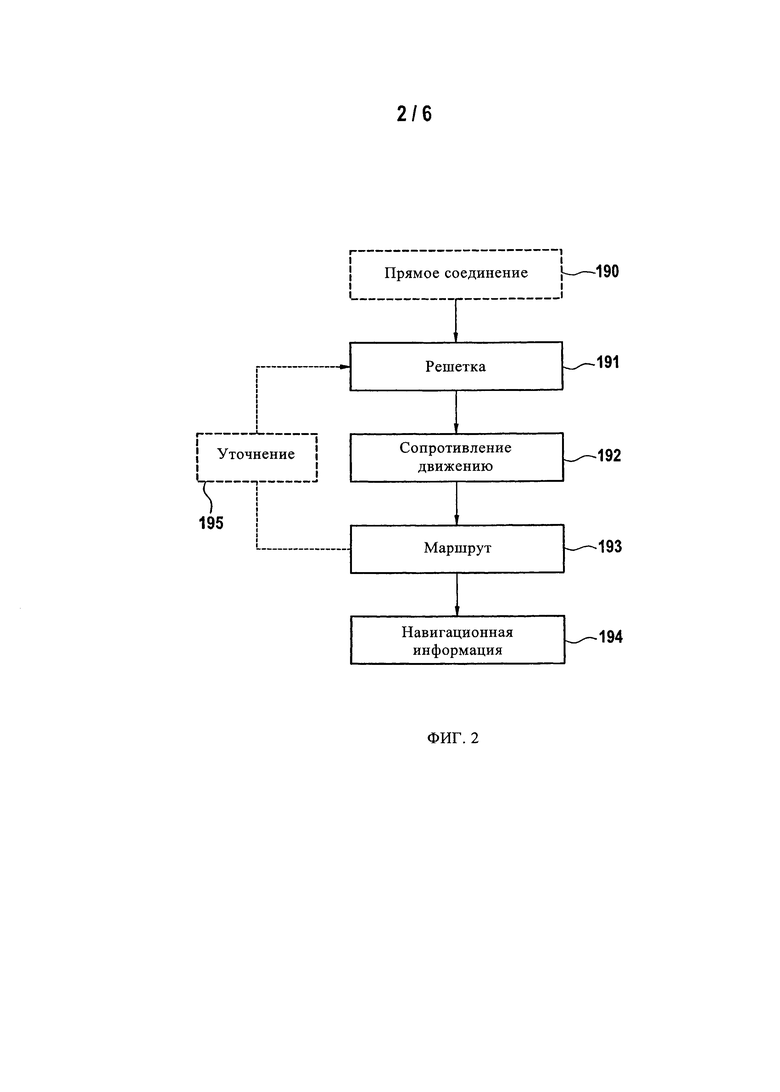
При осуществлении предлагаемого в изобретении способа вычислительное устройство 110 определяет, на необязательной первой стадии 190, прямую соединительную трассу (прямая, или кратчайшая, линия) между первым и вторым местоположениями и проверяет наличие на этой прямой соединительной трассе препятствий. Такая проверка может осуществляться на основании предоставленной (устройством 130) оцифрованной картографической информации. Если препятствия на прямой соединительной трассе отсутствуют, вычислительное устройство 110 может сгенерировать навигационную информацию, относящуюся к прямой соединительной трассе между первым и вторым местоположениями, а другие представленные на фиг.2 стадии осуществления способа можно не выполнять. При этом навигационная информация может воспроизводиться устройствами 150, 160. Для штурманского сопровождения движения водителю сообщается (визуально и/или акустически), например, информация о направлении на пункт назначения и расстоянии до него, а при необходимости на устройстве 150 индикации также графически представляется соответствующая географическая территория с прямой соединительной трассой.
В том случае, если на стадии 190 на прямой соединительной трассе выявлено препятствие, осуществление представленного на фиг, 2 способа продолжается путем перехода к стадии 191. Если описанная выше необязательная стадия 190 не предусмотрена, осуществление способа начинается со стадии 191.
На стадии 191 вычислительное устройство 110 строит для географического района в области первого и второго местоположений географическую сетку, состоящую из узловых точек. Эта географическая или поверхностная сетка может иметь различные формы. Что касается возможных элементов сетки, сетка может быть образована, например, треугольными, прямоугольными или шестиугольными ячейками. Кроме того, линии сетки, проходящие между узловыми точками, могут быть предусмотрены в форме любых кривых. К ним относятся, например, прямые и искривленные отрезки. Также сетка может сочетать в себе линии различных форм (например, как прямые, так и искривленные отрезки). Примеры сеток 200, 201, 202, построенных из треугольников и имеющих прямые линии, представлены на фиг.3-7, которые подробнее рассматриваются ниже.
На следующей стадии 192 вычислительное устройство 110 посредством предоставленной (устройством 130) оцифрованной картографической информации и содержимого карт определяет для возможных перемещений между граничащими друг с другом, или соседними, узловыми точками поверхностной сетки параметры движения. Параметры движения, которые можно назвать показателями сопротивления движению или проезду, относятся к характеристикам движения вдоль линий сетки от одной узловой точки сетки до соседней с ней узловой точки сетки. Так, сопротивление движению может относиться к таким характеристикам, как затрата времени, затрата сил и/или затрата энергии при движении, а также к невозможности движения ввиду наличия препятствия. Кроме того, учитываться также может расстояние, или дистанция.
В случае ровной местности сопротивление движению может быть определено, например, как малое, а при наличии на местности подъемов и спусков может быть установлено большее сопротивление, причем сопротивление движению может расти с увеличением угла подъема, например по экспоненциальному закону (в результате чего для отвесных склонов сопротивление стремится к бесконечности, что делает проезд невозможным). Точно так же бесконечно большое сопротивление движению, а значит, и полная невозможность проезда, может быть установлено для непригодных для проезда участков, таких как водоемы и реки, дома, ущелья, железнодорожные линии и т.д. Кроме того, сопротивление движению на застроенных территориях (в населенных пунктах) может быть определено меньшим, чем на территориях, отмеченных как незастроенные и непокрытые лесом площади, а на них меньшим, чем, например, в лесных районах. Указанные выше варианты осуществления изобретения представляют собой лишь некоторые возможные примеры эвристических подходов к определению сопротивления движению.
Благодаря формированию сетки и определению показателей сопротивления движению в сущности непрерывная бездорожная местность, которую невозможно обработать средствами теории графов, может быть переведена в граф с показателями сопротивления движению. На этом основании вычислительное устройство 110 может проводить поиск маршрута, как описано ниже, причем могут применяться известные алгоритмы и методы поиска маршрутов.
При помощи установленных показателей сопротивления движению вычислительное устройство 110 на следующей стадии 193 определяет для получения маршрута между первым и вторым местоположением путь движения, проходящий через несколько узловых точек сетки. При этом вычислительное устройство 110 может анализировать, на основании показателей сопротивления движению, множество различных путей движения, заданных узловыми точками сетки, чтобы определить для автомобиля 170 благоприятный или оптимальный путь движения. Один из возможных вариантов такого анализа заключается, например, в том, что при изучении возможных путей движения суммируют показатели сопротивления движению от одной узловой точки сетки к другой и выбирают маршрут с наименьшим суммарным сопротивлением движению. Если в том или ином месте имеется препятствие или запрет движения транспорта (бесконечно высокое сопротивление), вычисление соответствующего маршрута может быть при известных условиях прекращено. Альтернативные варианты действий, такие, например, как перемещение узловых точек и линий сетки для обхода препятствия (малоразмерного), подробнее рассматриваются ниже.
На одной следующей стадии 194 вычислительное устройство 110 на основании найденного (оптимального) пути движения генерирует по меньшей мере один вид навигационной информации, воспроизводимой посредством устройств 150, 160 (визуально и/или акустически). Что касается устройства 150 индикации, графически отображаться может, например, соответствующая географическая территория или ее фрагмент (без сетки) с соответствующим маршрутом, или путем движения. При этом отображаемый путь движения, в отличие от пути движения, проложенного через узловые точки сетки, может быть скругленным.
Рассмотренный на фиг.2 способ или стадии 191-194 его осуществления (при необходимости также со стадией 190 и стадией 195, описываемой ниже) могут во время поездки на автомобиле 170 многократно повторяться друг за другом. Таким образом, штурманское сопровождение движения транспортного средства 170 может корректироваться по движению транспортного средства 170 (которое при необходимости может отличаться от движения, соответствующего штурманскому сопровождению на основании навигационной информации).
На стадии 191 сетка, в частности ее ориентация, а также размер ее элементов или ячеек (например, треугольников, прямоугольников, шестиугольников и т.д.) может быть задана жестко, т.е. независимо от первого и второго местоположений, исходя из которых для автомобиля 170 должен быть проложен маршрут. Ориентация сетки может быть задана соответствующей, например, направлению "север-юг". В подобном случае первое и/или второе местоположение могут находиться как в узловых точках сетки, так и рядом с ними. Если первое или второе местоположение находится рядом с узловыми точками сетки, то при определении оптимального пути движения сначала может учитываться узловая точка сетки, близлежащая, соответственно, к первому или второму местоположению. На этом основании путь движения (проходящий только через узловые точки сетки) может быть "расширен" на первое и второе местоположения. При этом могут учитываться или задаваться, например, дополнительные показатели сопротивления движению между первым и вторым местоположениями и соответствующими близлежащими узловыми точками сетки (соответственно стадии 192 осуществления предлагаемого в изобретении способа). Также может проводиться проверка на наличие непреодолимых препятствий (соответственно стадии 190 осуществления предлагаемого в изобретении способа), в результате чего путь движения при необходимости может быть скорректирован (например, проложен в обход малоразмерного препятствия) или же может быть найден новый путь движения. В альтернативном варианте осуществления изобретения сетка (т.е. ее ориентация, а также размер ее ячеек) может задаваться таким образом, чтобы первое и второе местоположения (в основном) совпадали с узловыми точками сетки.
Представленный на фиг.2 способ может быть реализован с помощью компьютерной программы с соответствующим программным кодом, выполняемой в вычислительном устройстве 110 (вычислительный блок, или компьютер). Программный код при этом может быть записан на машиночитаемом носителе информации и, например, перед встраиванием навигационной системы 100 в автомобиль 170, переписан на вычислительное устройство 110. Представленный на фиг.2 способ может осуществляться с помощью не только программных средств, но и аппаратных средств, имеющихся в вычислительном устройстве 110. Эти сведения касаются также других возможных вариантов осуществления способа, описываемых ниже.
Помимо описанного выше случая, когда первое и второе местоположения, для которых осуществляются поиск маршрута и штурманское сопровождение, находятся на бездорожной местности в стороне от оцифрованной улично-дорожной сети, навигационная система 100, показанная на фиг.1, может быть выполнена, а способ, иллюстрируемый на фиг.2, может использоваться с расчетом и на другие случаи применения. Возможный пример такого применения подробнее рассматривается ниже со ссылкой на фиг.3. При этом автомобиль 170 находится на бездорожной местности, и требуется найти проезжий путь, или оптимальный маршрут, до точки входа с бездорожья в улично-дорожную сеть.
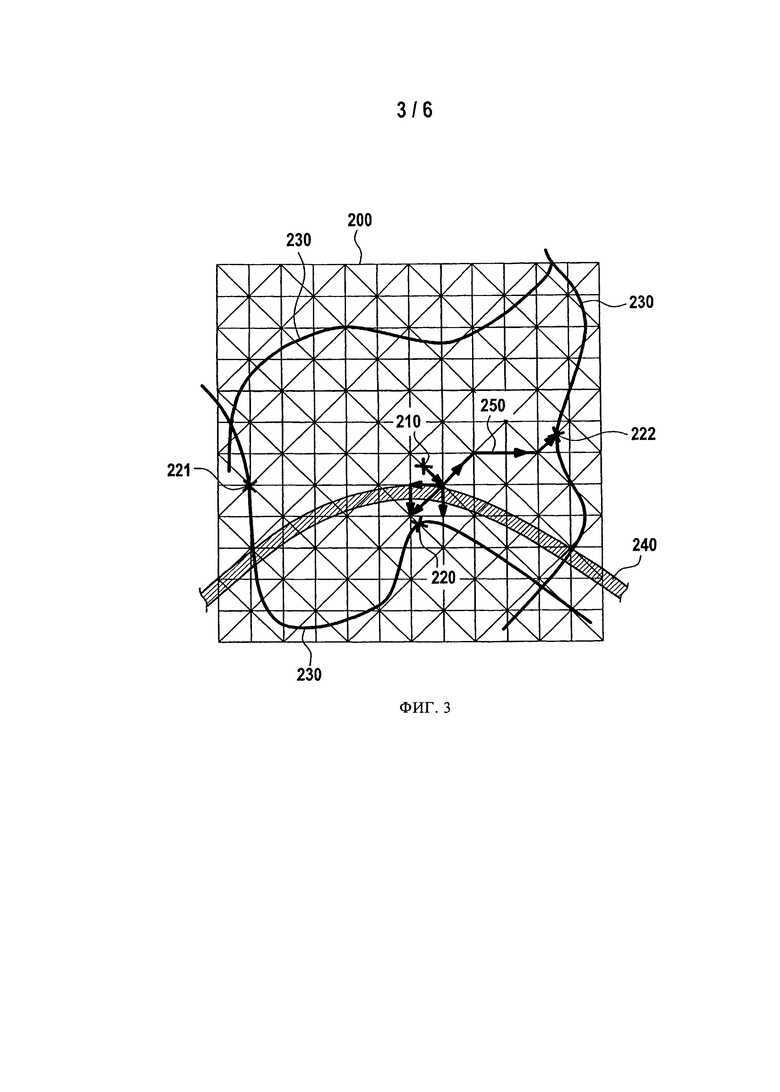
На фиг.3 показан географический район с несколькими дорогами 230 и рекой 240. Линии дорог 230 содержатся, в форме оцифрованной улично-дорожной сети в предоставляемой устройством 13 0-картографической информации вместе с границами реки 240 (препятствие). Показано также местоположение 210, обозначающее текущее место нахождения автомобиля 170. Автомобиль 170 при этом находится в стороне от дорог 230 в неизвестном или неоцифрованном районе, окружаемом дорогами 230. Навигационная система 100, или ее вычислительное устройство 110, может определить местоположение 210 (его координаты) с помощью приемника 120.
В рассматриваемом случае требуется найти подходящий путь обратно в (оцифрованную) улично-дорожную сеть. Эта задача может быть поставлена пользователем системы, или водителем автомобиля 170, путем ввода соответствующей команды ("поиск маршрута до точки входа в улично-дорожную сеть") посредством устройства 140 ввода. На этом основании вычислительное устройство 110 путем построения сетки 200 (стадия 191) и определения показателей сопротивления движению для перемещений между узловыми точками сетки (стадия 192) может находить оптимальный маршрут до входной точки (любой входной точки) или пункта назначения (стадия 193) и вырабатывать соответствующую навигационную информацию (стадия 194),
На фиг.3 в качестве примера представлены три возможных точки 220, 221, 222 входа в улично-дорожную сеть, которые могут быть учтены вычислительным устройством 110. При этом речь может идти о возможных местах въезда или попадания на дороги улично-дорожной сети, содержащихся в предоставленной устройством 130 картографической информации. В отношении возможных точек входа вычислительное устройство 110 может быть выполнено таким образом, чтобы учитывать только такие точки входа, которые находятся на заданном (например, заданном пользователем посредством устройства 140 ввода) удалении от текущего местоположения 210 автомобиля 170.
Как показано на фиг.3 стрелками, проходящими вдоль линий поверхностной сетки 200, вычислительное устройство 110 вычисляет возможные пути движения через узловые точки сетки к точкам 220, 221, 222 входа в улично-дорожную сеть, чтобы посредством соответствующих показателей сопротивления движению найти для автомобиля 170 наиболее выгодный или быстрый маршрут. Если при перемещении между двумя узловыми точками сетки на пути окажется препятствие, такое как река 240, а значит, сопротивление движению будет, например, стремиться к бесконечности, то вычисление соответствующего пути движения может быть прекращено или отменено. Эта ситуация показана на фиг.3 в отношении точки 220 входа.
Что же касается двух других точек 221, 222 входа в оцифрованную улично-дорожную сеть, то, например (наиболее выгодный, оптимальный) маршрут до точки 222 входа, обозначенный на фиг.3 сплошной линией 250, более выгоден, чем не показанный на фиг.3 путь движения до точки 221 входа. Это может объясняться тем, что путь 250 движения сопряжен с меньшим суммарным сопротивлением движению, тогда как (наиболее выгодный, оптимальный) путь движения до точки 221 входа проходит через большее число узловых точек сетки и поэтому суммарное сопротивление движению там больше.
Для найденного вычислительным устройством 110 оптимального пути 250 движения вычислительное устройство 110 вырабатывает соответствующую навигационную информацию для ее (визуального и/или звукового) воспроизведения с помощью устройств 150, 160. При этом на устройство 150 индикации может выводиться, например, соответствующее фиг.3 изображение географического района (без сетки 200) с дорогами 230, рекой 240, точкой 222 входа и путем движения, скругленным по сравнению с "угловатым" путем 250.
На фиг.3 отчетливо выявляется преимущество предлагаемого штурманского сопровождения движения по сетке. Хотя точка 220 входа и находится в пространстве на кратчайшем расстоянии от текущего местоположения 210 автомобиля 170, ввиду наличия реки 240 (препятствия) попасть в точку 220 входа из местоположения 210 невозможно, вследствие чего система направляет автомобиль 170 в более благоприятный пункт назначения, а именно в точку 222 входа.
Кроме того, в рассмотренном на фиг.3 примере до начала выполнения способа навигации с помощью географической сетки 200 сначала может быть проверена возможность движения по трассе, напрямую соединяющей текущее местоположение с возможными точками 220, 221, 222 входа (соответственно стадии 190 на фиг.2). И если при этом будет установлено, что все прямые соединительные трассы перекрыты (непреодолимыми) препятствиями, тогда система может приступить к осуществлению описанного выше поиска маршрута и штурманского сопровождения движения по нему с помощью сетки.
В отношении способа, рассмотренного выше со ссылкой на фиг.3, существует также возможность того, что точки 220, 221, 222 входа, или их положения, не содержатся в картографической информации (предоставляемой устройством 130). Например, выезд на показанные дороги 230 может быть возможен в любом месте, поскольку дороги 230 не имеют твердого покрытия. В подобном случае вычислительное устройство 110 может быть выполнено таким образом, чтобы для нахождения оптимального пути движения использовать в качестве учитываемых точек входа, например, точки пересечения линий сетки 200 с дорогами 230.
Что касается выбора одной из нескольких возможных точек входа в улично-дорожную сеть (содержащихся в картографической информации и/или представляющих собой точки пересечения сетки 200 с дорогами 230), то здесь может учитываться и следующая за движением по бездорожной местности поездка в оцифрованной улично-дорожной сети до (заданного водителем) конечного пункта назначения. При этом вычислительное устройство 110 может быть выполнено таким образом, чтобы из нескольких точек входа выбирать оптимальную точку входа, для которой весь маршрут - т.е. от исходной точки на бездорожной местности до точки входа в оцифрованную улично-дорожную сеть и оттуда до пункта назначения - является оптимальным. Прокладка маршрута между исходным пунктом и оптимальной точкой входа осуществляется на основании способа навигации по сетке.
Далее, для повышения качества штурманского сопровождения формирование сетки и вычисление пути движения посредством показателей сопротивления движению могут многократно повторяться, а значит, поэтапно уточняться, как это показано на фиг.2 в части, касающейся стадии 195. Этот подход подробнее рассматривается ниже со ссылкой на фиг.4 и 5, где показан изображенный на фиг.3 путь 250 движения между текущим местоположением 210 автомобиля 170 и точкой 222 входа в улично-дорожную сеть. При этом сетка 200 функционирует в качестве первой "крупноячеистой" сетки, а путь 250 движения представляет собой первый путь движения, проложенный относительно грубо или приблизительно (фиг.4). На основании первой сетки и пути движения вычислительное устройство 110 строит вторую сетку 201 (например, только в зоне первого пути 250 движения) и находит второй путь 251 движения, который может быть улучшен или уточнен по сравнению с первым путем 250 движения (фиг.5). При необходимости эти операции можно повторять многократно, последовательно, раз за разом уточняя оптимальный маршрут.
В качестве альтернативы или в дополнение к вышеописанному, вычислительное устройство 110 может быть выполнено с возможностью генерирования сетки с нерегулярным растром, вследствие чего на различных участках сетки значения ширины ее ячеек между узловыми точками различны. Это позволяет гибко адаптировать соответствующую сетку к тому или иному географическому району. В частности, это позволяет избежать блокирования малоразмерными объектами, или препятствиями, маршрута (в остальном благоприятного) из-за того, что линия (крупноячеистой) сетки проходит по подобному объекту.
Для наглядности на фиг.6 показана подобная нерегулярная сетка 202, снова в отношении обстановки, представленной на фиг.3, с текущим местоположением 210 автомобиля 170 и точкой 222 входа в улично-дорожную сеть. При этом вблизи точки 210 пути находится, например, ряд мелких препятствий 241, тогда как остальная часть района подобных препятствий 241 не имеет и поэтому является относительно однородной. Такие особенности местности вычислительное устройство 110 может определить посредством предоставленной (устройством 130) картографической информации. На этом основании вычислительное устройство 110 может задать относительно узкую ширину ячеек сетки лишь на неоднородном участке местности и повторно, с помощью показателей сопротивления движению для перемещений между узловыми точками сетки, найти (оптимальный) путь 252 движения. Это решение обеспечивает быстроту и надежность штурманского сопровождения движения. Вместо показанной на фиг.6 сетки 202, в которой имеется только два типа элементов, или ячеек (треугольников), различного размера или только два различных значения ширины ячеек сетки, можно предусмотреть нерегулярную сетку, которая, в зависимости от соответствующих географических или топографических условий/особенностей или плотности данных, имела бы и более двух различных градаций ширины ячеек сетки.
Вычислительное устройство 110 также может быть выполнено с возможностью перемещения узловых точек сетки, построенной для географического района. Это позволяет гибко адаптировать сетку к соответствующему географическому району. Наглядно такое перемещение показано на фиг.7 для сетки 200, изображенной на фиг, 3 и 4. При этом в области, находящейся между узловыми точками сетки, имеются относительно малоразмерные препятствия 241. Вместо прокладки пути движения с помощью только узловых точек, жестко заданных сеткой 200, узловые точки, а с ними и линии сетки 200, можно сдвинуть для обхода препятствий 241, как это показано на фиг.7 на примере пути 253 движения.
Сопоставимый метод, выполняемый вычислительным устройством 110, заключается в том, что учитывается некий коридор или возможное перемещение узловых точек и линий сетки относительно друг друга, причем в этом случае также может использоваться содержимое карт и показатели сопротивления движению (этот метод на чертежах не иллюстрируется). Это также позволяет прокладывать путь движения в обход малоразмерных препятствий, избегая блокирования пути движения (в остальном благоприятного) такими препятствиями.
Наряду с описанными выше случаями применения (когда исходный пункт движения и пункт назначения находятся на бездорожной местности или когда начальный пункт находится на бездорожной местности и необходимо найти подходящий путь для попадания в оцифрованную улично-дорожную сеть) навигационная система 100, показанная на фиг.1, может быть выполнена, а способ, иллюстрируемый на фиг.2, может использоваться с расчетом и на другие случаи применения. Еще один возможный пример такого применения касается необходимости нахождения маршрута, когда из начального пункта один участок пути сначала проходит в оцифрованной улично-дорожной сети, а затем еще один участок пути проходит до пункта назначения в стороне от улично-дорожной сети. В подобном случае вычислительное устройство 110 может быть выполнено таким образом, чтобы определять одну или несколько точек выхода из улично-дорожной сети для покидания этой сети, и с помощью наложения сетки на бездорожную местность и определения показателей сопротивления движению находить оптимальный путь движения к заданному конечному местоположению. При этом точка выхода из улично-дорожной сети может служить первым местоположением при поиске маршрута с помощью сетки, а конечный пункт назначения - вторым местоположением. Возможные точки выхода из улично-дорожной сети вычислительное устройство 110 может определять, например, путем выяснения соответствующих возможностей съезда с дороги по картографической информации и/или путем определения точек пересечения линий сетки с дорогами улично-дорожной сети. Кроме того, с учетом всего маршрута (или путем определения оптимального общего маршрута) при этом может определяться одна отдельная оптимальная точка выхода из улично-дорожной сети.
Аналогичный подход применяется в случае, когда как исходное, так и конечное местоположение находятся на участках дорог оцифрованной улично-дорожной сети, между которыми лежит неоцифрованный или плохо оцифрованный район. При этом вычислительное устройство 110 может определять как одну или несколько точек выхода (первое местоположение), так и одну или несколько точек входа (второе местоположение) и вычислять между этими точками оптимальный маршрут путем поиска маршрута по сетке, используя рассмотренные выше подходы и приемы. С учетом всего маршрута в этом случае также могут определяться одна оптимальная точка входа и одна оптимальная точка выхода.
Варианты осуществления изобретения, рассмотренные выше с привлечением чертежей, являются лишь предпочтительными и характерными вариантами. Помимо этих описанных и представленных на чертежах вариантов осуществления изобретения возможны и другие варианты с использованием измененных признаков или других комбинаций признаков. Например, рассмотренные выше признаки также могут быть реализованы в мобильной, или портативной, навигационной системе для автомобиля. Также изобретение осуществимо в навигационных системах, которые, помимо представленных на фиг.1 устройств и компонентов, могут включать в себя и другие устройства или могут быть соединены с другими устройствами. Кроме того, рассмотренные концепции и подходы применимы не только в отношении автомобилей, но могут использоваться и для поиска маршрута и штурманского сопровождения движения любых транспортных средств (например, велосипедов, водных транспортных средств, судов и т.д.), а также для пешеходов.
Что касается навигации применительно к судоходству, здесь, например, также существует возможность построения для географического района сетки и нахождения оптимального маршрута посредством показателей сопротивления движению для перемещений между узловыми точками сетки. При этом условия, по сравнению с рассмотренной выше навигацией на земле, - противоположные, поскольку в данном случае при прокладке маршрута избегать нужно участков суши. Помимо участков суши, в применяемых показателях сопротивления движению могут учитываться и другие факторы, такие, например, как мели, течения и ветровой режим.
Кроме того, необходимо оговорить, что представленная на фиг.2 стадия 190 осуществления предлагаемого в изобретении способа, включающая определение прямой соединительной трассы ("прямая, или кратчайшая, линия") между первым и вторым местоположениями, проверку наличия на прямой соединительной трассе препятствия (например, по предоставленной оцифрованной картографической информации) и выработку навигационной информации, относящейся к этой прямой соединительной трассе (если не выявлено препятствий), также может осуществляться независимо от навигации по сетке.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ И УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ПО МЕНЬШЕЙ МЕРЕ ОДНОЙ ВЕРОЯТНОСТИ ВЫХОДА ИЗ РАЙОНА, ИДЕНТИФИЦИРУЕМОГО В ЦИФРОВОЙ КАРТЕ КАК ОТКРЫТАЯ МЕСТНОСТЬ | 2011 |
|
RU2574040C2 |
| СПОСОБ ОПЕРАТИВНОГО СОСТАВЛЕНИЯ МОБИЛИЗАЦИОННЫХ КАРТ ПРИ ЛИКВИДАЦИИ ПОСЛЕДСТВИЙ ЧРЕЗВЫЧАЙНЫХ СИТУАЦИЙ | 2014 |
|
RU2559340C1 |
| РАДИОКАНАЛЬНАЯ СИСТЕМА ДЛЯ ПОИСКА И ПЕРЕХВАТА УГНАННЫХ ТРАНСПОРТНЫХ СРЕДСТВ | 2003 |
|
RU2228860C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА | 2005 |
|
RU2272255C1 |
| РАДИОКАНАЛЬНАЯ СИСТЕМА МОНИТОРИНГА И СОПРОВОЖДЕНИЯ ТРАНСПОРТНЫХ СРЕДСТВ | 2004 |
|
RU2240938C1 |
| АВТОНОМНАЯ ОПТИЧЕСКАЯ СИСТЕМА ЛОКАЛЬНОГО ПОЗИЦИОНИРОВАНИЯ И НАВИГАЦИИ | 2023 |
|
RU2816087C1 |
| ДОСТАВКА, ОБРАБОТКА И ОБНОВЛЕНИЕ НОВОЙ КАРТОГРАФИЧЕСКОЙ ИНФОРМАЦИИ | 2011 |
|
RU2577548C2 |
| ДОСТАВКА, ОБРАБОТКА И ОБНОВЛЕНИЕ НОВОЙ КАРТОГРАФИЧЕСКОЙ ИНФОРМАЦИИ | 2011 |
|
RU2563104C2 |
| РАДИОПЕЛЕНГАЦИОННАЯ СИСТЕМА ДЛЯ ПОИСКА И СОПРОВОЖДЕНИЯ ТРАНСПОРТНЫХ СРЕДСТВ | 2005 |
|
RU2264937C1 |
| СПОСОБ И СИСТЕМА ОПРЕДЕЛЕНИЯ ТЕКУЩЕЙ И РЕКОМЕНДУЕМОЙ ПОЛОСЫ ДВИЖЕНИЯ АВТОТРАНСПОРТНОГО СРЕДСТВА | 2016 |
|
RU2663692C2 |



Изобретение относится к области навигации. Технический результат - обеспечение штурманского сопровождения движения транспортного средства на бездорожной местности. Навигационная система содержит: устройство для предоставления картографической информации и вычислительное устройство для выработки навигационной информации, используемой для штурманского сопровождения движения. Вычислительное устройство выполнено с возможностью: построения для географического района, находящегося в стороне от оцифрованной улично-дорожной сети, сетки, содержащей узловые точки; определения, посредством предоставленной картографической информации, параметров движения для перемещений между узловыми точками сетки, причем один параметр движения относится к характеристике сопротивления движению транспортного средства от одной узловой точки сетки до соседней с ней узловой точки сетки; нахождения, посредством указанных параметров движения, пути движения через несколько узловых точек сетки; и выработки, на основании найденного пути движения, навигационной информации. 2 н. и 7 з.п. ф-лы, 7 ил.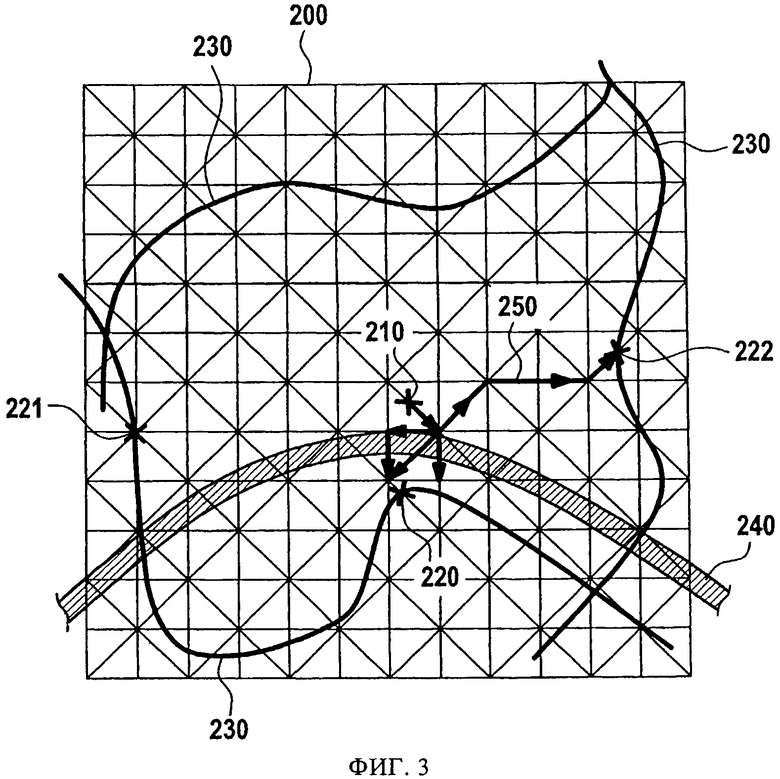
1. Навигационная система (100), содержащая устройство (130) для предоставления картографической информации и вычислительное устройство (110) для выработки навигационной информации, используемой для штурманского сопровождения движения, причем вычислительное устройство (110) выполнено с возможностью:
- построения для географического района, находящегося в стороне от оцифрованной улично-дорожной сети, сетки (200, 201, 202), содержащей узловые точки,
- определения, посредством предоставленной картографической информации, параметров движения для перемещений между узловыми точками сетки, причем один параметр движения относится к характеристике сопротивления движению транспортного средства от одной узловой точки сетки до соседней с ней узловой точки сетки,
- нахождения, посредством указанных параметров движения, пути (250, 251, 252, 253) движения через несколько узловых точек сетки, и
- выработки, на основании найденного пути (250, 251, 252, 253) движения, навигационной информации.
2. Навигационная система (100) по п. 1, содержащая также устройство (120) определения местоположения для определения текущего географического местоположения.
3. Навигационная система (100) по п. 1, в которой вычислительное устройство (110) выполнено с возможностью учета нескольких возможных пунктов (220, 221, 222) назначения и нахождения, посредством указанных параметров движения, пути (250, 251, 252, 253) движения до одного из этих возможных пунктов (222) назначения.
4. Навигационная система (100) по п. 1, в которой вычислительное устройство (110) выполнено с возможностью построения сетки (202) с нерегулярным растром, вследствие чего на различных участках сетки значения ширины ее ячеек, измеряемой между ее узловыми точками, различны.
5. Навигационная система (100) по п. 1, в которой вычислительное устройство (110) выполнено с возможностью перемещения узловых точек и линий сетки (200) в обход непреодолимого препятствия (241), являющегося малоразмерным относительно ширины ячеек сетки.
6. Навигационная система (100) по п. 1, в которой параметр движения относится по меньшей мере к одной из следующих характеристик движения от одной узловой точки сетки до соседней с ней узловой точки сетки: затрата времени, затрата сил, затрата энергии, расстояние, невозможность движения.
7. Навигационная система (100) по п. 1, в которой вычислительное устройство (110) выполнено с возможностью нахождения, перед построением сетки (200, 201, 202), прямой соединительной трассы, проходящей между первым и вторым местоположениями, и определения наличия препятствия на этой прямой соединительной трассе.
8. Навигационная система (100) по одному из предыдущих пунктов, в которой вычислительное устройство выполнено с возможностью построения первой сетки (200) и нахождения первого пути (250) движения, а также выполняемого на их основании построения второй сетки (201) и нахождения второго пути (251) движения, причем первая сетка (200) имеет большую ширину ячеек между соответствующими узловыми точками, чем вторая сетка (201).
9. Способ штурманского сопровождения движения, включающий следующие стадии:
- построение для географического района, находящегося в стороне от оцифрованной улично-дорожной сети, сетки (200, 201, 202), содержащей узловые точки,
- определение при помощи картографической информации параметров движения для перемещений между узловыми точками сетки, причем один параметр движения относится к характеристике сопротивления движению транспортного средства от одной узловой точки сетки до соседней с ней узловой точки сетки,
- нахождение пути (250, 251, 252, 253) движения через несколько узловых точек сетки посредством указанных параметров движения, и
- выработку на основании найденного пути (250, 251, 252, 253) движения навигационной информации, используемой для штурманского сопровождения движения.
| Перекатываемый затвор для водоемов | 1922 |
|
SU2001A1 |
| GIS-Lab: Наложение метрической и/или градусной сетки на макет карты, 22.09.2009, [найдено 02.06.2015] | |||
| Найдено в Интернет по адресу: <http://web.archive.org/web/20090922224404/http://gis-lab.info/qa/graticule.html>, с | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ОПТИМАЛЬНОГО МАРШРУТА ДВИЖЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА | 2008 |
|
RU2377658C1 |
| А.Ю | |||
| ДОРОГОВ и др., Алгоритмы оптимального движения мобильных | |||

