Область техники, к которой относится изобретение
Настоящее изобретение относится к способу определения по меньшей мере одной вероятности выхода из района, идентифицируемого в цифровой карте как открытая местность, к устройству для определения по меньшей мере одной вероятности выхода из района, идентифицируемого в цифровой карте как открытая местность, а также к соответствующему компьютерному программному продукту.
Уровень техники
Известные навигационные системы, функционирующие на основе дорожных сетей, формируют предложение по маршруту, или предлагаемый маршрут, на основании заложенной в них информационной базы. Как правило, такой информационной базой является географическая цифровая карта, включающая в себя проезжие дороги. Предлагаемый маршрут может передаваться по системе связи водителю транспортного средства в качестве рекомендации по движению. При этом посредством определения местоположения транспортного средства осуществляется согласование определенного местоположения транспортного средства и предлагаемого для него маршрута, и с учетом обстановки, в которой находится транспортное средство, а также с упреждением в отношении предлагаемого маршрута вырабатываются рекомендации по движению. Поскольку в результате определения местоположения выдается не абсолютное, а лишь вероятное местоположение, необходимо, чтобы содержащиеся в цифровой карте дороги были расширены в обе стороны на определенную область допуска. Если определенное местоположение транспортного средства находится в пределах области допуска, то транспортное средство считается находящимся на дороге. Этот метод, называемый методом привязки к карте (сопоставления с картой), указывает на то, что текущее местоположение транспортного средства находится вне дороги, только при выходе за пределы указанной области допуска. В этом случае известный метод не может соотнести с текущим местоположением транспортного средства какую-либо дорогу или примыкающую к ней область допуска и характеризует транспортное средство как находящееся на бездорожной, или открытой, местности. После того как транспортное средство, выйдя из бездорожного района, физически окажется на дороге, по которой продолжит движение, известному методу для привязки к карте потребуется некоторое время, пока транспортное средство будет идентифицировано как находящееся на дороге, и водителю транспортного средства снова можно будет выдать адаптированную к изменившейся ситуации рекомендацию по движению.
В публикации DE 10146115 В4 описывается способ осуществления штурманского сопровождения движения транспортного средства в пункт назначения посредством навигации с указанием направления движения, если транспортное средство идентифицируется как находящееся вне известной дорожной сети и при отсутствии альтернативной известной дороги, которая могла бы вывести транспортное средство в пункт назначения.
Раскрытие изобретения
Исходя из вышеизложенного, в рамках настоящего изобретения предложены способ определения по меньшей мере одной вероятности выхода из района, идентифицируемого в цифровой карте как открытая местность, устройство для определения по меньшей мере одной вероятности выхода из района, идентифицируемого в цифровой карте как открытая местность, а также соответствующий компьютерный программный продукт, охарактеризованные в независимых пунктах формулы изобретения. Частные варианты осуществления изобретения приведены в соответствующих зависимых пунктах формулы изобретения, а также рассмотрены в приведенном ниже описании.
В основе настоящего изобретения лежит осознание того, что временной задержки начала ведения по маршруту после достижения известной дороги, ведущей из открытой местности, можно избежать, если заранее определить вероятность выхода транспортного средства с открытой местности, а именно из текущего местоположения транспортного средства на открытой местности. Это позволяет уже заблаговременно подготовить ведение по маршруту, определив вероятную точку выхода с открытой местности, находящуюся на примыкающей к этой открытой местности дороге. Для достижения более высокой вероятности прогноза открытой местности и ограничивающим ее объектам можно поставить в соответствие атрибуты из цифровой карты, которые повышают или снижают вероятность проезда по определенному участку местности или достижения определенной точки на местности. На основании этих атрибутов можно, исходя из текущего местоположения транспортного средства на открытой местности, заранее определить вероятность достижения одной или нескольких точек на ограничивающем открытую местность объекте (ограничении открытой местности). Кроме того, при таком определении можно учитывать другие факторы, такие как текущая ориентация транспортного средства или текущая скорость движения транспортного средства.
Преимуществом изобретения является то, что благодаря применению способа, соответствующего рассматриваемому здесь подходу, можно быстрее определить или проложить маршрут, прежде чем транспортное средство покинет район, идентифицируемый как открытая местность. Также благодаря изобретению водитель транспортного средства сможет быстрее выполнять рекомендации по движению и поворотам на маршруте и быстрее добраться до заданного пункта назначения. За счет исключения ошибок в определении маршрута по окончании покидания района открытой местности можно минимизировать проходимое расстояние и избежать излишнего расхода энергии.
Одним объектом настоящего изобретения является способ определения по меньшей мере одной вероятности выхода из района, идентифицируемого в цифровой карте как открытая местность, исходя из находящегося в пределах района местоположения, включающий следующие шаги:
- разбиение района на множество ячеек с присвоением по меньшей мере одному находящемуся между местоположением и краем района переходу из одной ячейки в соседнюю ячейку начальной вероятности перехода;
- коррекцию начальной вероятности перехода, выполняемую при наличии по меньшей мере одного вида информации из цифровой карты, относящегося к ячейке или соседней ячейке, с получением скорректированной вероятности перехода; и
- определение вероятности выхода, выполняемое, по меньшей мере, с использованием скорректированной вероятности перехода.
Объектом настоящего изобретения является также устройство для определения по меньшей мере одной вероятности выхода из района, идентифицируемого в цифровой карте как открытая местность, исходя из находящегося в пределах района местоположения, содержащее:
- узел для разбиения района на множество ячеек с присвоением по меньшей мере одному находящемуся между местоположением и краем района переходу из одной ячейки в соседнюю ячейку начальной вероятности перехода;
- узел для коррекции начальной вероятности указанного перехода, выполняемой при наличии по меньшей мере одного вида информации из цифровой карты, относящегося к указанной ячейке или соседней с ней ячейке, с получением скорректированной вероятности перехода; и
- узел для определения вероятности выхода, которое выполняется по меньшей мере с использованием скорректированной вероятности перехода.
Цифровая карта может быть представлением собранных данных с привязкой в системе пространственных координат. Собранные данные могут представлять феномены пространства. Например, феноменами пространства могут быть пути сообщения, местность, водоемы или растительность. Феномены пространства могут храниться в цифровой карте обобщенно и в цифровом виде. Участки местности без путей сообщения могут быть обозначены в цифровой карте как открытая местность или бездорожный район. Открытая местность может иметь свои особенности. Район, идентифицируемый как открытая местность, может быть ограничен такими охватываемыми картой феноменами пространства, как пути сообщения, поселения или водоемы. Район может быть подразделен, или разбит, на участки. Разбиение может выполняться с применением произвольно или систематически устанавливаемых границ. Границы могут делить район на ячейки. Ячейки могут быть расположены упорядоченно или неупорядоченно. Ячейки могут иметь любые формы на плоскости, такие, например, как треугольную, четырехугольную, пятиугольную или шестиугольную и т.д. Две соседние ячейки могут иметь переход на своей общей границе. Две ячейки с единственной точкой соприкосновения могут иметь переход, например, в узловой точке, где сходятся несколько границ. Переходу из первой ячейки во вторую ячейку может быть присвоена начальная вероятность перехода. В первой ячейке все начальные вероятности перехода в соседние ячейки могут быть сложены с получением общего, или суммарного, значения вероятностей переходов, например значения, равного единице. Начальные вероятности переходов могут быть равными. Начальная вероятность перехода может корректироваться путем выполнения шагов предлагаемого в изобретении способа. На шаге коррекции значение начальной вероятности перехода может быть изменено, т.е. значение начальной вероятности перехода может быть увеличено или уменьшено. В результате коррекции получают скорректированную вероятность перехода. Увеличение или уменьшение значения может представлять большую или меньшую вероятность покидания или достижения соответствующей ячейки. На эту вероятность могут влиять феномены пространства ячейки или соседней с ней ячейки. Эти феномены пространства могут отображаться информацией, содержащейся в цифровой карте. Например, маловероятным может быть достижение транспортным средством местности, труднопроезжей для такого транспортного средства. Тогда вероятность достижения непроезжего участка местности может стремиться к нулю. Соответственно, более вероятным может быть достижение транспортным средством хорошо проезжей местности или движение транспортного средства по такой местности, и в то же время менее вероятным может быть покидание хорошо проезжей местности. Посредством скорректированных вероятностей перехода, а в случае невозможности коррекции - посредством начальных вероятностей перехода можно определить вероятность выхода для ячейки, находящейся у края открытой местности / бездорожного района. Для этого вероятности переходов между находящимся в пределах района местоположением и находящейся у края района ячейкой можно комбинировать согласно определенной инструкции по обработке. Такая инструкция по обработке может быть, например, марковской цепью, каждый элемент которой может представлять одну соответствующую ячейку, а марковские вероятности между элементами цепи могут представлять вероятности переходов.
Также настоящее изобретение относится к устройству или навигационному прибору, выполненному для осуществления или реализации шагов предлагаемого в изобретении способа. В частности, такое устройство или навигационное устройство может иметь (функциональные) узлы, выполненные для осуществления соответствующих шагов способа. При воплощении изобретения в этом варианте, а именно в виде блока управления, положенная в основу изобретения задача также решается быстро и эффективно.
Под устройством или навигационным прибором в настоящей заявке может пониматься электрический прибор, который обрабатывает сигналы от датчиков и в зависимости от них выдает навигационные сигналы. Навигационный прибор может иметь интерфейс, который может быть реализован аппаратными и/или программными средствами. В случае аппаратной реализации интерфейсы могут быть, например, частью так называемой системной специализированной интегральной схемы (ASIC), которая включает в себя самые разные функции навигационного прибора. Вместе с тем, также возможен вариант, в котором интерфейсы представляют собой собственные интегральные схемы или по меньшей мере частично состоят из дискретных компонентов. В случае программной реализации интерфейсы могут быть программными модулями, содержащимися, например, в микроконтроллере наряду с другими программными модулями.
Предпочтительным также является осуществление изобретения в форме компьютерного программного продукта с программным кодом, записанным на машиночитаемом носителе информации, таком как полупроводниковое запоминающее устройство, накопитель на жестком магнитном диске или оптический накопитель, и используемого для осуществления способа, соответствующего одной из описанных выше форм осуществления изобретения при выполнении программы в устройстве или навигационном приборе.
В одном из варианте осуществления настоящего изобретения на шаге разбиения несколько переходов могут образовывать сеть, причем сеть покрывает район, и/или ячейки ограничивают заранее заданной максимальной площадью района. Сеть может покрывать район полностью и непрерывно. Если величина, или площадь, района превышает заданную величину, район может быть ограничен одной или несколькими вспомогательными границами до заданной величины. Например, заданной величиной может быть один квадратный километр. Это позволяет ограничить время обработки данных для выполнения шагов способа и выполнять шаги способа быстро.
В еще одном варианте осуществления настоящего изобретения на шаге коррекции начальную вероятность перехода можно корректировать с использованием класса пути сообщения, если ячейка включает в себя по меньшей мере этот путь сообщения, а цифровая карта содержит информацию о пути сообщения и его классе, и/или в котором начальную вероятность перехода можно корректировать с использованием по меньшей мере одной характеристики местности в ячейке или в соседней ячейке, если цифровая карта содержит информацию о характеристике местности. Класс пути сообщения может представлять определенную информацию, относящуюся к вероятности достижения и/или покидания пути сообщения. Например, вероятность перехода из смежной ячейки в ячейку с дорогой низкого класса, например проселочной или местной дорогой, может быть выше, чем вероятность перехода в ячейку с дорогой более высокого класса, такой как дорога для скоростного движения. Вероятность перехода в ячейку с дорогой высшего класса, такой как скоростная автомагистраль, может стремиться к нулю. Попасть на скоростную автомагистраль можно, как правило, исключительно через соответствующие въезды, т.е. с примыкающих дорог меньших классов. Таким образом целесообразно, чтобы определяемая вероятность выхода в ячейку, содержащую дорогу очень высокого класса, например скоростную автомагистраль, была очень малой или равной нулю. На проезжаемость ячейки также может влиять характеристика местности. Например, вероятность перехода из ячейки с малым уклоном местности в ячейку, в которой уклон местности отсутствует, может быть выше, чем вероятность перехода из ячейки с малым уклоном местности в ячейку с сильным уклоном местности. Вероятность перехода в ячейки, являющиеся непроезжими, т.е. непригодными для движения транспортного средства, ввиду наличия таких характеристик или особенностей, как скалы, крутые склоны, водные поверхности или густой лес, а также застройка, может стремиться к нулю. Если непроезжие ячейки ограничивают район, то целесообразно, чтобы вероятность выхода из района через такие ячейки была как можно меньшей. Это позволяет исключить возможность неверного расчета предложений по маршруту и учитывать для предварительного расчета только перспективные точки выхода с открытой местности.
В еще одном варианте осуществления настоящего изобретения на шаге коррекции начальную вероятность перехода можно корректировать с использованием мгновенного направления движения и/или мгновенной скорости транспортного средства, в котором осуществляется предлагаемый в изобретении способ. Таким образом, при определении вероятности выхода можно учитывать мгновенное (текущее) состояние движения транспортного средства. Например, маловероятным может быть совершение транспортным средством крайне резких изменений направления и/или скорости движения. Мгновенная скорость движения транспортного средства может влиять на его способность к прохождению поворотов и изгибов дорог. Например, двигаясь со скоростью пешехода, транспортное средство может проходить более крутые повороты, чем при движении с максимальной скоростью. Таким образом, вероятность переходов, расположенных прямо по курсу движения транспортного средства, или переходов, достижимых при умеренных углах поворота руля, может быть выше, чем вероятность переходов, расположенных, например, рядом с транспортным средством или противоположно мгновенному направлению движения, т.е. сзади по курсу движения.
Далее, в еще одном варианте осуществления изобретения на шаге коррекции начальную вероятность перехода можно корректировать с использованием расстояния перехода к точке входа транспортного средства на открытую местность. Например, место стоянки транспортных средств или въезд на территорию, находящуюся в частном владении, может быть не учтен в карте и таким образом может быть заложен в карту как открытая местность. Тогда можно рассчитывать, что транспортное средство покинет открытую местность в том же месте, где оно вошло на открытую местность. Если же транспортное средство находится на очень большом удалении от точки входа, то более вероятным может быть то, что транспортное средство покинет бездорожный район / открытую местность в другом месте.
В еще одном варианте осуществления изобретения на шаге разбиения по меньшей мере одному другому находящемуся между местоположением и краем района переходу из ячейки в другую соседнюю ячейку может быть присвоена другая начальная вероятность перехода, или начальная вероятность другого перехода. На шаге коррекции начальной вероятности другая начальная вероятность перехода может корректироваться при наличии по меньшей мере одного другого вида информации из цифровой карты, относящегося к ячейке или другой соседней ячейке, с получением скорректированной другой вероятности перехода. На шаге определения может определяться другая вероятность выхода, причем другую вероятность выхода определяют по меньшей мере с использованием скорректированной другой вероятности перехода. Один переход может находиться между первой и второй ячейками. Другой переход может находиться между первой и третьей ячейками. Эти переходы находятся между ячейками, непосредственно связанными между собой, т.е. между ячейками, достигаемыми непосредственно друг из друга. Третья ячейка может быть расположена в непосредственном соседстве с первой ячейкой. Вторая и третья ячейка не обязательно непосредственно соседствуют друг с другом, но могут быть расположены таким образом. Другому переходу может быть присвоена другая (своя) начальная вероятность перехода. Эту другую начальную вероятность перехода, или начальную вероятность другого перехода, можно назвать второй начальной вероятностью перехода. Коррекция другой начальной вероятности перехода может осуществляться в соответствии с информацией, получаемой из цифровой карты в отношении первой и/или третьей ячейки. Скорректированную другую вероятность перехода можно назвать второй скорректированной вероятностью перехода, и она будет характеризовать переход между первой и третьей ячейками. Вероятностью выхода из района может быть первая вероятность выхода. Еще одной вероятностью выхода из района может быть вторая вероятность выхода. Первая и вторая вероятности выхода могут относиться к различным ячейкам, но обе вероятности могут относиться также к одной и той же ячейке, однако при использовании различных вероятностей переходов. Для определения первой вероятности выхода может использоваться первая вероятность перехода, для определения второй вероятности выхода может использоваться вторая вероятность перехода. Подобный вариант осуществления настоящего изобретения дает то преимущество, что он позволяет определять наиболее вероятную точку выхода из района, для нахождения которой используются вероятности различных переходов. Это повышает точность прогноза.
Далее, на шаге определения может определяться путь выхода, причем путь выхода содержит переход между ячейкой и соседней ячейкой, если вероятность выхода через него выше другой вероятности выхода. Определяемым путем выхода может быть тот путь, для которого вероятность выхода наиболее высока. Таким образом, рекомендация по движению для водителя транспортного средства может быть заранее сформирована в более вероятном месте выхода с открытой местности, а значит, ею можно будет быстрее воспользоваться.
В дополнительном варианте осуществления настоящего изобретения на шаге разбиения по меньшей мере одному находящемуся между местоположением и краем района последующему переходу из соседней ячейки в следующую соседнюю ячейку может быть присвоена последующая начальная вероятность перехода, или начальная вероятность последующего перехода. На шаге коррекции последующая начальная вероятность перехода может корректироваться при наличии по меньшей мере одного вида следующей информации из цифровой карты, относящегося к соседней ячейке или следующей за ней ячейке, с получением скорректированной последующей вероятности перехода. Кроме того, на шаге определения вероятность выхода можно определять с использованием скорректированной последующей вероятности для последующего перехода. Следующей ячейкой может быть четвертая ячейка. Последующей начальной вероятностью перехода может быть третья начальная вероятность перехода. Следующая информация может относиться ко второй или четвертой ячейке. Скорректированной последующей вероятностью перехода может быть третья скорректированная вероятность перехода. Вероятность выхода можно определять с использованием первой и третьей скорректированной вероятности перехода. Подобный вариант осуществления настоящего изобретения дает то преимущество, что в нем для определения вероятности выхода из района используется последовательность, или серия, переходов. Это позволяет учитывать содержащиеся в ячейках объекты или феномены пространства, находящиеся дальше от первоначально рассмотренной ячейки. Тем самым еще более повышается степень достоверности прогноза относительно того, в каком месте произойдет покидание открытой местности.
Краткое описание чертежей
Ниже изобретение рассматривается подробнее на примерах его осуществления, поясняемых прилагаемыми чертежами, на которых показано:
на фиг.1 - блок-схема первого варианта осуществления настоящего изобретения;
на фиг.2 - блок-схема второго варианта осуществления настоящего изобретения;
на фиг.3 - структурная схема варианта осуществления настоящего изобретения;
на фиг.4 - схема, поясняющая действия, выполняемые при определении вероятности выхода в одном варианте осуществления настоящего изобретения; и
на фиг.5 - фрагмент схемы, поясняющий действия, выполняемые при определении вероятности выхода в одном варианте осуществления настоящего изобретения.
Осуществление изобретения
Одинаковые и эквивалентные элементы могут быть обозначены на чертежах одними и теми же или аналогичными номерами позиций, причем повторное описание таких элементов не приводится. Кроме того, на чертежах, в относящемся к ним описании, а также в формуле изобретения многочисленные признаки содержатся в определенной комбинации. Специалисту при этом ясно, что эти признаки также могут рассматриваться в отдельности или их можно объединять в другие комбинации, которые в данном описании явно не описаны. Кроме того, сущность изобретения в приведенном ниже описании может раскрываться с использованием различных размеров и размерностей, однако возможности осуществления изобретения этими размерами и размерностями не ограничиваются. Кроме того, шаги предлагаемого в изобретении способа могут повторяться, а также выполняться в последовательности, отличающейся от рассмотренной. Если в том или ином примере осуществления изобретения между первым признаком/шагом и вторым признаком/шагом приведен составной союз "и/или", это должно трактоваться таким образом, что в одном варианте осуществления изобретения присутствуют как первый признак/шаг, так и второй признак/шаг и в другом варианте осуществления изобретения имеется либо только первый признак /шаг, либо только второй признак /шаг.
На фиг.1 в качестве пояснения первого варианта осуществления настоящего изобретения показана блок-схема моделирования перемещений в бездорожном районе для прогнозирования предстоящих перемещений посредством марковского процесса. Способ определения по меньшей мере одной вероятности выхода из района, идентифицируемого в цифровой карте как открытая местность, включает в себя шаг 110 разбиения, шаг 120 коррекции, а также шаг 130 определения. На шаге 110 разбиения район разбивают на множество ячеек. По меньшей мере одному переходу из одной ячейки в соседнюю ячейку присваивают начальную вероятность перехода. При этом указанный переход находится между местоположением, находящимся внутри этого района и краем района. На шаге 120 коррекции начальную вероятность перехода корректируют с получением скорректированной вероятности перехода. Коррекция происходит при наличии по меньшей мере одного вида информации, получаемого из цифровой карты. При этом такая информация относится к ячейке и/или соседней с ней ячейке. На шаге 130 определения с использованием скорректированной вероятности перехода определяют вероятность выхода.
Предлагаемым в изобретении способом можно определять вероятности, с которыми водитель, попавший на своем транспортном средстве в бездорожный район, сможет выйти из этого района в той или иной точке цифровой дорожной карты. Это позволяет определить среди таких точек точку с наивысшей вероятностью. Для этого на бездорожный район, в котором находится водитель на своем транспортном средстве, накладывается сетка. Поля сетки служат состояниями для марковского процесса. С помощью топографии района, текущего местоположения и ориентации транспортного средства и модели транспортного средства для физически корректного моделирования движения, а также характеристик дорог, ограничивающих бездорожный район, вычисляют вероятности перехода из одного состояния в другое. Дополнительно эти вероятности также могут корректироваться по области входа. Так, можно рассчитать вероятность достижения внешнего состояния, а значит, достижения транспортным средством дороги из его текущего местоположения. Таким образом, навигационная система может быстрее сориентироваться при возвращении транспортного средства в дорожную сеть и, при необходимости, может начать руководство действиями водителя, т.е. штурманское сопровождение движения транспортного средства. Определяемые таким образом вероятности актуализируются, например, при изменении местоположения транспортного средства, в частности при каждом таком изменении. Кроме того, предлагаемый в изобретении способ всегда предлагает некоторое решение, даже если имеющиеся данные не предоставляют всей необходимой информации. Предлагаемый в изобретении способ делает возможным более быстрое ориентирование при возвращении в дорожную сеть из бездорожного района.
На фиг.2 показана блок-схема выполнения предлагаемого способа в еще одном варианте осуществления настоящего изобретения. Способ определения по меньшей мере одной вероятности выхода из района, идентифицируемого в цифровой карте как открытая местность, инициализируется на шаге 200. При этом местоположение транспортного средства обозначается как находящееся на открытой местности, или вне дорог (Off-Road).
Шаг 110 разбиения района делится на несколько подшагов. На подшаге 202 идентификации границ идентифицируются границы бездорожного района. На подшаге 204 наложения сетки район покрывают сеткой. На подшаге 206 определения начальных вероятностей перехода определяют начальные вероятности перехода. Шаг 120 коррекции также делится на несколько подшагов. На подшаге 208 уточнения вероятностей начальные вероятности корректируют с учетом характеристик дорог, ограничивающих район. На подшаге 210 уточнения с учетом особенностей местности начальные вероятности уточняют с учетом характеристик местности. На подшаге 212 уточнения в окрестности местоположения транспортного средства вышеупомянутые вероятности уточняют с учетом физически возможных перемещений транспортного средства. Дополнительно может выполняться шаг 214 повышения вероятностей с учетом точки входа в бездорожный район. На шаге 216 вероятности актуализируют при изменении местоположения.
Шаг 130 определения также включает в себя несколько подшагов. На подшаге 218 определения определяют результат вычисления вероятностей достижения ячеек по краям района. На подшаге 220 выбора определяют наиболее вероятную точку выхода. В качестве альтернативы этому подшагу на подшаге 222 может определяться нормированная вероятностная картина.
Во время поездки водитель на своем транспортном средстве может покинуть сеть дорог. Однако большинство навигационных приборов выполнены с возможностью поддержки водителя в отношении штурманского сопровождения его движения в пункт назначения по предусмотренным для этого дорогам, заложенным в цифровую карту. За счет такой функциональности навигационная система пытается соотнести местоположение водителя с определенным местом на дороге, используя так называемый метод привязки к карте. При покидании дороги система также пытается привязать местоположение транспортного средства к дороге. И лишь в случае выхода за некоторый предел система перестает считать, что водитель со своим транспортным средством еще находится на дороге. Таким образом, местоположение транспортного средства в дальнейшем уже не сопоставляется с дорогами. Вместо этого система указывает установленное местоположение транспортного средства в бездорожном районе. Обычно по прошествии определенного времени водитель снова добирается до дорожной сети и продолжает движение по ней. В случае этого повторного переходного процесса навигационной системе требуется некоторое время для адаптации, чтобы найти свое местоположение на дороге и возобновить выполнение своей основной задачи, а именно руководство действиями водителя на маршруте. Предлагаемый в изобретении способ совершенствует этот процесс, позволяя системе заранее вычислять возможные и вероятные точки выхода из бездорожного района и таким образом быстрее ориентироваться, если водитель покинул бездорожный район. Способ предусматривает использование располагаемой информации для вычисления того, в какой точке водитель на своем транспортном средстве с наибольшей вероятностью выйдет из бездорожного района. При этом после инициализации вероятности переходов последовательно уточняются при каждом поступлении информации.
В нижеследующем описании подробнее рассматривается вариант осуществления настоящего изобретения, соответствующий блок-схеме, приведенной на фиг.2. Способ инициализируется (шаг 200), если текущее местоположение классифицируется как находящееся вне дорог. Для этого на первом шаге (шаг 202) определяются образованные дорогами кромки, ограничивающие бездорожный район, в котором находится водитель на своем транспортном средстве. Если этот район слишком велик или если он ввиду своих топографических особенностей, например, когда речь идет о море, не ограничен только дорогами, то размер района ограничивается определенной величиной, например одним квадратным километром.
Если водитель, двигаясь на своем транспортном средстве в бездорожном районе, достигнет подобной искусственно проведенной (для ограничения размера) границы, способ инициализируется повторно с новым районом. Это позволяет ограничить сложность, избежав чрезмерного увеличения времени вычислений. На этот район также накладывается сетка (шаг 204), включающая ограничивающие дороги. В описании речь идет о прямоугольной сетке (растре), но вместе с тем могут использоваться и другие сетки. Каждое поле сетки служит состоянием дискретного марковского процесса. Для реализации такой марковской цепи требуются (шаг 206) вероятности перехода, от одного момента времени до другого, в другое состояние или пребывания в нем. Сумма вероятностей согласно предписанию должна составлять единицу. Затем эти вероятности используются для вычисления всей цепи. Ячейки у края района получают вероятность того, что марковская цепь останется в этом состоянии, равную единице. Вероятности того, что состоится переход в другую ячейку, задаются равными нулю. Тем самым эти ячейки представляют так называемое стационарное состояние, в котором цепь остается.
В остальных ячейках вероятность того, что состояние в ячейке сохранится, задается равным нулю. Вероятность перехода в соседнюю ячейку инициализируется как равномерно распределенная. Таким образом, в случае прямоугольной сетки, в которой допускаются диагональные переходы, вероятность перехода в соседнюю ячейку составляет 1/8. Тем самым для всех ячеек заданы начальные вероятности перехода.
В дальнейшем эти вероятности уточняются при помощи располагаемой информации. На первом шаге уточнения (шаг 208), например, характеристики дорог, хранящихся в цифровой карте, проверяют на предмет того, насколько вероятно попадание на них из бездорожного района. Так, вероятность попадания на дороги более высоких классов, например на скоростные автомагистрали, явно ниже, чем на дороги меньших классов, например на дороги с гравийным покрытием. Такие дороги обычно оцифрованы лишь в недостаточной степени или непосредственно ведут в бездорожный район. Поэтому вероятность покинуть бездорожный район по такой дороге значительно выше.
На этом шаге вероятности перехода корректируют для ячеек, соседних с внешними ячейками. При этом повышают или понижают вероятности перехода во все внешние ячейки и соответственно этому также равномерно повышают или понижают вероятности перехода в другие, находящиеся дальше вглубь района ячейки. Также не происходит изменения вероятности для внешних ячеек, не являющихся частью ограничивающей район дороги и частью искусственно проведенной границы района. При дальнейшем выполнении способа они рассматриваются, например, как находящиеся на воображаемой дороге. И только при проведении оценки они рассматриваются дифференцированно.
На втором возможном шаге уточнения (шаг 210) для коррекции вероятностей перехода для находящихся в пределах района ячеек используется, при ее наличии, информация о топографии бездорожного района. Если район включает в себя абсолютно непреодолимые места, например озера, то вероятности перехода в соответствующие ячейки устанавливаются равными нулю. Также используют перепады высот, учитываемые таким образом, что вероятности перехода для таких (со значительным перепадом высот) ячеек заметно уменьшают, а для ячеек с небольшим перепадом высот - соответственно повышают. Суть такого изменения заключается в присвоении более простым для проезда отрезкам пути более высоких вероятностей.
Третье возможное уточнение (шаг 212) касается ячеек, находящихся в окрестности текущего местоположения транспортного средства. В данном случае вероятности корректируют в соответствии с физическими условиями, определяющими то, каким может быть движение транспортного средства. Так, переходам из одной ячейки в другую, возможным за счет лишь неестественных поворотов, назначают лишь очень малые вероятности, тогда как вероятности переходов в ячейки, достижимые путем прямолинейного движения транспортного средства и его легких поворотов, оцениваются выше. Этот шаг повышает сложность способа, поскольку вероятности перехода перестают быть жесткими, а изменяются на каждом шаге ввиду изменяющихся местоположения и направления движения, однако такая локальная коррекция оказывает большое влияние на вероятности достижения конечного состояния. Именно при приближении к краю района точка выхода выкристаллизовывается таким образом быстрее.
Как возможный вариант, на четвертом шаге (шаг 214) можно увеличивать вероятности в окрестности точки входа в бездорожный район. Тем самым принимается допущение, что водитель намеренно лишь кратковременно остается в бездорожном районе и собирается покинуть его в том же месте. Это учитывается повышением вероятности прохождения соответствующего перехода. Пока водитель находится в окрестности соответствующей ячейки, его транспортное средство считается ориентированным на точку входа. Чем сильнее водитель удаляется от точки входа, тем меньше становится влияние этого повышения, что соответствует допущению того, что водитель наметил другую точку выхода. Если имеются все вероятности переходов, то для всех внешних ячеек с помощью марковской цепи могут быть вычислены (шаг 218) вероятности достижения этих ячеек из текущего местоположения. Это вычисление выполняется, например, с помощью обычных математических методов. Также таким образом можно определить (шаг 220) ячейку, обладающую наивысшей вероятностью ее достижения. Эта ячейка принимается в данный момент времени за наиболее вероятную точку выхода из бездорожного района. Здесь, если речь идет о ячейке, находящейся на воображаемой дороге, можно применять дифференцированный подход. Так, либо можно сделать предположение, что водитель пока не намерен покидать бездорожный район. Или же можно провести поиск внешней ячейки, находящейся на реальной дороге и обладающей наивысшей вероятностью ее достижения. В качестве альтернативы, также можно нормировать вероятности достижения всех внешних ячеек, таким образом получая общую вероятностную картину по точкам выхода (шаг 222). В этом случае также можно учитывать все внешние ячейки или только ячейки, находящиеся на реальной дороге.
Здесь следует заметить, что вычисление вероятностей достижения внешней ячейки всегда возможно за счет инициализации и без дополнительной информации. В этом случае способ соответствует методу поиска кратчайшего пути, по которому вычисляется та точка выхода, которая находится на наименьшем расстоянии от текущего местоположения.
Если при очередном измерении местоположения транспортного средства оказывается, что это местоположение изменилось, вследствие чего водитель находится в другой ячейке, что в данном случае представляет следующий шаг по времени, то выполнение способа, например, на третьем шаге уточнения (шаг 212) может быть возобновлено (шаг 216). При этом заново корректируют вероятности перехода в окрестности именно той ячейки, в которой находится транспортное средство. Ячейки, которые уже не находятся непосредственно в окружении вышеупомянутой ячейки, получают первоначальные вероятности перехода без учета модели транспортного средства. Для тех ячеек, которые находятся в окрестности транспортного средства, коррекция проводится в соответствии с моделью транспортного средства (например, в отношении максимально возможной поворотливости, а значит, и достижимости этих ячеек).
Ранее вычисленные вероятности можно сохранять в памяти (запоминающем устройстве), чтобы использовать их повторно в том случае, если ячейка снова выпадет из окрестности транспортного средства. После этого осуществление способа возобновляется, как это описано выше, и вычисляются новые вероятности. Для упрощения этих новых вычислений определенные частичные цепи, относящиеся к внешним ячейкам, можно сохранять в памяти. Если на них не влияет коррекция в окрестности текущего местоположения транспортного средства, то они и далее сохраняют свою действительность. Чем больше частичных цепей сохраняется в памяти, тем быстрее осуществление способа, но и тем больше используется места в памяти.
На фиг.3 показана структурная схема одного варианта осуществления настоящего изобретения. Транспортное средство имеет навигационную систему 300 и находится в определенном местоположении. К навигационной системе 300 подключено устройство 310 для определения по меньшей мере одной вероятности выхода из района, идентифицируемого в цифровой карте как открытая местность. Устройство 310 содержит узел 312 для разбиения района на множество ячеек. В узле 312 по меньшей мере одному переходу из одной ячейки в соседнюю ячейку присваивается начальная вероятность перехода. При этом переход находится между местоположением транспортного средства и краем района. Также устройство 310 содержит узел 314 для коррекции начальной вероятности перехода. В узле 314 начальная вероятность перехода корректируется при наличии по меньшей мере одного вида информации, получаемого из цифровой карты. При этом указанная информация относится к вышеупомянутой ячейке или соседней с ней ячейке. Узел 314 выдает скорректированную вероятность перехода. В узле 316 для определения вероятности выхода вероятность выхода определяется, по меньшей мере, с использованием скорректированной вероятности перехода. Используя найденную вероятность выхода, навигационная система 300 может начать ведение по маршруту еще до того, как транспортное средство достигнет края района.
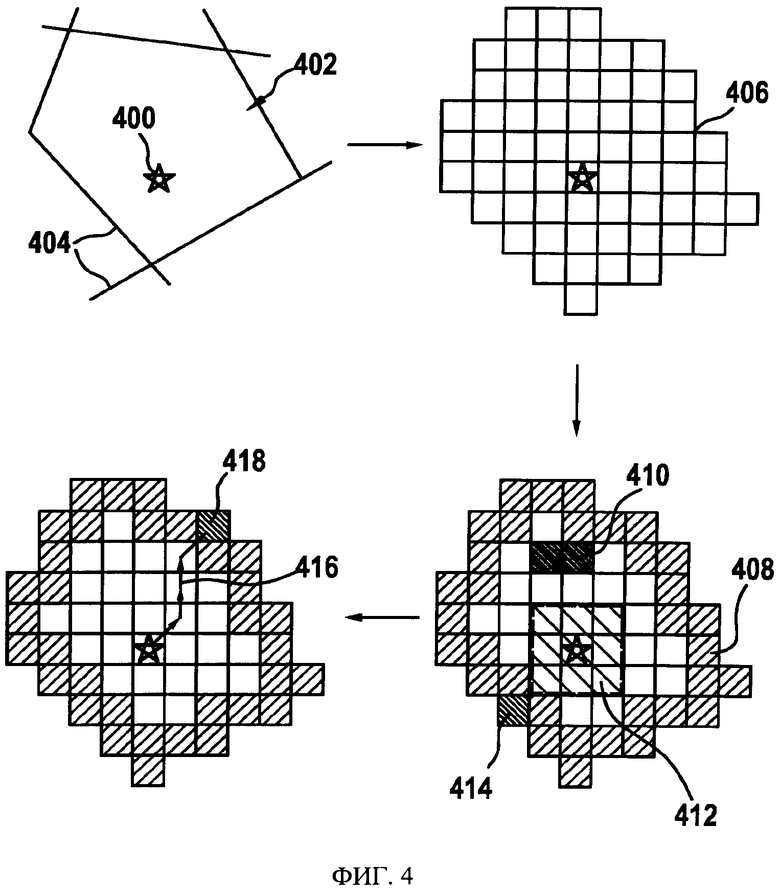
На фиг.4 показан порядок действий и результаты осуществления способа, используемого для вычисления наиболее вероятной точки выхода из бездорожного района в одном варианте осуществления настоящего изобретения. Транспортное средство находится в некотором местоположении 400 в пределах района 402. Район 402 идентифицируется в цифровой карте как открытая местность. Район 402 окружен границами 404. Такими границами 404 являются, например, пути сообщения, водные преграды, зоны застройки или непроходимые участки местности. Район 402 покрывается сеткой 406 с образованием отдельных ячеек. В данном варианте осуществления изобретения в качестве сетки 406 используется четырехугольная, в частности квадратная, сетка. Каждому переходу из одной ячейки сетки 406 в соседнюю с ней ячейку назначается, или присваивается, начальная вероятность перехода.
Затем следует коррекция начальных вероятностей переходов. Для этого в ячейках 408 сетки 406 корректируются начальные вероятности переходов. У края района 402 коррекция выполняется в ответ на наличие картографической информации, например при наличии информации о классе содержащегося в ячейке пути сообщения или о труднопреодолимости содержащегося в ячейке водоема, участка местности или застроенного района. На удалении от края района коррекция выполняется соответственно труднопреодолимости содержащегося в ячейке водоема, участка местности или застроенного района. Если ячейки 410 являются недостижимыми, то этим ячейкам и переходам в них назначают низкие скорректированные вероятности переходов, которые отражают маловероятность попадания в эти ячейки из окружающих их соседних ячеек.
Ячейки 412 в окрестности транспортного средства, находящегося в местоположении 400, получают вероятности переходов, скорректированные по ориентации и скорости транспортного средства в местоположении 400. Расстояние от входной ячейки 414, в которой транспортное средство вошло на открытую местность, влияет на вероятности переходов между ячейками в окрестности таким образом, что повторное попадание во входную ячейку 414 более вероятно - до определенного расстояния от местоположения до входной ячейки 414 на открытой местности, - чем непопадание. Из местоположения 400, например, определяется путь 416 выхода. У пути 416 выхода имеется определяемая на основании начальных вероятностей переходов и скорректированных вероятностей переходов вероятность выхода, представляющая вероятность достижения определенной ячейки на краю района. Таким образом, путь выхода проходит через несколько ячеек открытой местности, разделенной посредством сетки. Таким образом, сравнивая, например, суммарные вероятности переходов, полученные для отдельных ячеек, через которые проходит несколько различных путей выхода, ведущих к различным ячейкам выхода на краю района, можно определить путь выхода, имеющий наибольшую суммарную вероятность выхода. Этот путь выхода описывает наиболее вероятный в данный момент времени путь, по которому транспортное средство будет двигаться из местоположения 400. Этот путь 416 выхода ведет к находящейся у края района ячейке, являющейся наиболее вероятной ячейкой 418 выхода. Начиная с ячейки 418 выхода, навигационная система в транспортном средстве сможет еще до того, как транспортное средство достигнет ячейки 418 выхода, подготовить процесс навигации по дорогам или приступить к этой навигации, благодаря чему при покидании транспортным средством открытой местности в этой ячейке выхода не произойдет никакой задержки.
На фиг.5 показан порядок действий для определения наиболее вероятной ячейки выхода в одном варианте осуществления настоящего изобретения. Между местоположением и краем района находится несколько ячеек. По меньшей мере одному переходу между ячейками, в данном случае - переходу между ячейкой 500 и соседней ячейкой 502, присваивают начальную вероятность перехода. При наличии получаемой из цифровой карты информации начальную вероятность перехода корректируют с получением скорректированной вероятности перехода из ячейки 500 в соседнюю ячейку 502. Содержащаяся в цифровой карте информация относится либо к ячейке 500, либо к соседней ячейке 502. Например, эта информация может представлять собой указание на то, что в ячейке 502 имеется озеро или пруд, проехать через которые невозможно. С использованием скорректированной вероятности перехода определяют вероятность выхода транспортного средства, находящегося в ячейке 500, в ячейку у края района.
Другому переходу, в данном случае - переходу между ячейкой 500 и другой ячейкой 504, присваивают другую начальную вероятность перехода. Если в цифровой карте имеется другая информация, относящаяся либо к ячейке 500, либо к другой ячейке 504, другую начальную вероятность перехода корректируют соответственно. В результате получают скорректированную другую вероятность перехода, т.е. скорректированную вероятность перехода между ячейкой 500 и другой ячейкой 504. С использованием скорректированной другой вероятности перехода между ячейкой 500 и другой ячейкой 504 определяют вероятность выхода из вышеупомянутого местоположения через другую ячейку 504, находящуюся у края района. Другая ячейка 504 у края района может быть ячейкой, находящейся на краю района.
Если вероятность выхода выше другой вероятности выхода, то определяют путь выхода, содержащий вероятность перехода (т.е. перехода между ячейками 500 и 502). Если другая вероятность выхода выше вероятности выхода, то определяют другой путь выхода, содержащий другую вероятность перехода, т.е. перехода из ячейки 500 в другую ячейку 504. Затем на основании последовательности переходов между соседними ячейками определяют путь выхода, причем для проведения различия между отдельными переходами переход между ячейкой 500 и следующей ячейкой 506 назван последующим переходом. Затем последующему переходу между соседней ячейкой 502 и следующей ячейкой 506 присваивают последующую начальную вероятность перехода. При наличии получаемой из цифровой карты следующей информации, относящейся к соседней ячейке 502 и/или следующей за ней ячейке 506, последующую начальную вероятность перехода корректируют соответственно. В результате получают скорректированную последующую вероятность перехода между соседней ячейкой 502 и следующей за ней ячейкой 506.



Изобретение относится к навигационным системам. Способ определения по меньшей мере одной вероятности выхода из района, идентифицируемого в цифровой карте как открытая местность, исходя из находящегося в пределах района местоположения, включает разбиение района на множество ячеек с присвоением одному находящемуся между местоположением и краем района переходу из одной ячейки в соседнюю ячейку начальной вероятности перехода. Затем производят коррекцию начальной вероятности перехода, выполняемую при наличии вида информации из цифровой карты, относящегося к ячейке или соседней ячейке, с получением скорректированной вероятности перехода и определяют вероятность выхода, выполняемое с использованием скорректированной вероятности перехода. Изобретение также относится к устройству для определения вероятности выхода из района в соответствии с указанным способом. Уменьшается время определения или прокладки маршрута. 2 н. и 7 з.п. ф-лы, 5 ил.
1. Способ определения по меньшей мере одной вероятности выхода из района, идентифицируемого в цифровой карте как открытая местность (402), исходя из находящегося в пределах района местоположения (400), включающий следующие шаги:
- разбиение (110) района на множество ячеек (406) с присвоением по меньшей мере одному находящемуся между местоположением и краем района переходу из одной ячейки (500) в соседнюю ячейку (502) начальной вероятности перехода;
- коррекцию (120) начальной вероятности перехода, выполняемую при наличии по меньшей мере одного вида информации из цифровой карты, относящегося к ячейке или соседней ячейке, с получением скорректированной вероятности перехода; и
- определение (130) вероятности выхода, выполняемое по меньшей мере с использованием скорректированной вероятности перехода.
2. Способ по п.1, в котором на шаге разбиения (110) разбиение выполняют таким образом, что несколько переходов образуют сеть, причем сеть покрывает район (402), и/или ячейки ограничивают заранее заданной максимальной площадью района.
3. Способ по п.1, в котором на шаге коррекции (120) начальную вероятность перехода корректируют с использованием класса пути сообщения (404), если ячейка (500) включает в себя по меньшей мере этот путь сообщения, а цифровая карта содержит информацию о пути сообщения и его классе, и/или в котором начальную вероятность перехода корректируют с использованием по меньшей мере одной характеристики местности в ячейке (500) или в соседней ячейке (502), если цифровая карта содержит информацию о характеристике местности.
4. Способ по п.1, в котором на шаге коррекции (120) начальную вероятность перехода корректируют с использованием направления движения и/или скорости транспортного средства, в котором осуществляется способ.
5. Способ по п.1, в котором на шаге коррекции (120) начальную вероятность перехода корректируют с использованием расстояния перехода к точке (414) входа транспортного средства на открытую местность (402).
6. Способ по п.1, в котором:
- на шаге разбиения (110) по меньшей мере одному другому находящемуся между местоположением (400) и краем района переходу из ячейки (500) в другую соседнюю ячейку (504) присваивают другую начальную вероятность перехода;
- на шаге коррекции (120) другую начальную вероятность перехода корректируют при наличии по меньшей мере одного другого вида информации из цифровой карты, относящегося к ячейке (500) или другой соседней ячейке (504), с получением скорректированной другой вероятности перехода; и
- на шаге определения (130) определяют другую вероятность выхода, причем другую вероятность выхода определяют по меньшей мере с использованием скорректированной другой вероятности перехода.
7. Способ по п.6, в котором на шаге определения (130) определяют путь (416) выхода из (402) района, причем путь выхода содержит переход между ячейкой (500) и соседней ячейкой (502), если вероятность выхода через него выше другой вероятности выхода.
8. Способ по одному из предыдущих пунктов, в котором
- на шаге разбиения (110) по меньшей мере одному находящемуся между местоположением (400) и краем (402) района последующему переходу из соседней ячейки (502) в следующую соседнюю ячейку (506) присваивают последующую начальную вероятность перехода;
- на шаге коррекции (120) последующую начальную вероятность перехода корректируют при наличии по меньшей мере одного вида следующей информации из цифровой карты, относящегося к соседней ячейке (502) или следующей за ней ячейке (506), с получением скорректированной последующей вероятности перехода; и
- на шаге определения (130) вероятность выхода определяют с использованием скорректированной последующей вероятности для последующего перехода.
9. Устройство (310) для определения по меньшей мере одной вероятности выхода из района, идентифицируемого в цифровой карте как открытая местность (402), исходя из находящегося в пределах района местоположения (400), содержащее:
- узел (312) для разбиения района на множество ячеек (406) с присвоением по меньшей мере одному находящемуся между местоположением и краем района переходу из одной ячейки (500) в соседнюю ячейку (502) начальной вероятности перехода;
- узел (314) для коррекции начальной вероятности указанного перехода, выполняемой при наличии по меньшей мере одного вида информации из цифровой карты, относящегося к указанной ячейке (500) или соседней с ней ячейке (502), с получением скорректированной вероятности перехода; и
- узел (316) для определения вероятности выхода, которое выполняется по меньшей мере с использованием скорректированной вероятности перехода.
| Устройство для накатывания резьбы | 1980 |
|
SU935183A1 |
| CN 1653505 A, 10.08.2005 | |||
| DE 10146115 A1, 24.04.2003. | |||

