Изобретение относится к транспортирующим устройствам, предназначенным для производства погрузочно-выгрузочных и складских операций, и может быть использовано в корабельном оборудовании для погрузки и выгрузки грузов.
Известен тележечный конвейер по авт. св. СССР N 1253898, МПК4 B 65 C 17/06, 1984 г. Известное устройство содержит транспортную втулочно-роликовую тяговую цепь с каретками (тележками), привод перемещения тяговой цепи в механизмы останова кареток, установленные на трассе в местах, определенных технологией. Каждая каретка выполнена с возможностью разъемного соединения с тяговой цепью через смонтированные на каретке элементы связи. Последние выполнены в виде неподвижно закрепленных на каретке планок со впадинами под ролики тяговой цепи. При этом каретка установлена с возможностью перемещения на роликах по смонтированным на раме конвейера прямолинейным направляющим. Траектория движения тяговой цепи в местах размещения устройств останова выполнена с изогнутыми участками с возможностью разъединения их с элементами связи каретки посредством смонтированных на раме конвейера роликов.
Однако известное устройство, обеспечивая перемещение грузонесущего средства (каретки) и его останов в заданных местах, не предполагает обеспечение выдвижения грузонесущего средства с конвейера в местах останова.
Также известно устройство для перемещения грузонесущего средства по акцептованной заявке Японии N 26-12158, МПК4 B 66 F 7/02, 1984 г. Известное устройство содержит основание, относительно которого перемещается грузовая платформа, закрепленные на основании два приводных зубчатых колеса и прикрепленные снизу к платформе ведомые зубчатые колеса, охватываемые роликовыми цепями одностороннего сворачивания, свободный конец каждой из которых закреплен на упомянутом основании, защитные ограждения, предупреждающие сход цепей с ведущих и ведомых зубчатых колес и реверсивный силовой привод для вращения приводных зубчатых колес.
Недостатком известного устройства для перемещения грузонесущего средства является то, что тяговые цепи с грузонесущим средством относительно основания могут выдвигаться только в одну сторону, что ограничивает функциональные возможности устройства.
Известно устройство для перемещения грузонесущего средства, содержащееся в описании изобретения по авт. св. СССР N 1232639, МПК4 B 66 F 3/00, 1984 г. Известное устройство содержит расположенные в направляющих две тяговые цепи с шарнирно-сочлененными звеньями, огибающие каждая соответствующее приводное зубчатое колесо и соединенные с грузонесущим средством. Устройство снабжено запирающим устройством, включающим копиры, смонтированные до и после приводного зубчатого колеса. Копиры взаимодействуют с запирающими пальцами, имеющими полусферические головки и закрепленными на сочлененных звеньях тяговой цепи с помощью запирающего приспособления. Копиры и запирающие пальцы смонтированы с обеих сторон шарнирно-сочлененных звеньев тяговой цепи. Пальцы размещены в отверстиях первого ряда звеньев тяговой цепи с возможностью перемещения в соосные отверстия, которые выполнены в звеньях второго ряда тяговой цепи. Запирающий палец имеет кольцевой буртик, взаимодействующий со звеном первого ряда тяговой цепи и ограничивающий перемещение пальца при запирании тяговой цепи в спрямленном положении последней. Запирающее приспособление снабжено подпружиненными шариковыми фиксаторами. В звеньях первого ряда тяговой цепи выполнены отверстия, оси которых перпендикулярны осям пальцев и пересекают их. Подпружиненные шариковые фиксаторы размещены в отверстиях звеньев первого ряда тяговой цепи с возможностью взаимодействия с кольцевыми канавками, которые выполнены на боковой поверхности запирающих пальцев.
При работе устройства приводное зубчатое колесо, вращаясь, перемещает тяговую цепь в направлении запирающего копира, который, нажимая на полусферическую головку пальца, заставляет его отжать шарик фиксатора, переместиться из звена первого ряда и войти концом в отверстие звена второго ряда до упора кольцевого буртика в звено первого ряда, в результате чего цепь оказывается в спрямленном состоянии и перемещает грузонесущее средство. При изменении направления вращения приводного зубчатого колеса тяговая цепь перемещается в направлении отпирающего копира, который, воздействуя на полусферическую головку запирающего пальца, заставляет его выйти из отверстия звена второго ряда, в результате чего цепь оказывается незапертой и может огибать приводное зубчатое колесо. При этом в кольцевую канавку запирающего пальца западает шарик фиксатора, и палец удерживается в заданном положении.
В варианте осуществления устройство используется в подъемнике для вертикального перемещения грузонесущего средства. В принципе подобное устройство может быть смонтировано на горизонтальной платформе и в этом случае может быть использовано для горизонтального перемещения грузонесущего средства, например, с грузовой платформы подъемника на площадку погрузки-разгрузки.
Недостатком известного устройства для перемещения грузонесущего средства является то, что тяговые цепи с грузонесущим средством могут выдвигаться только в одну сторону. Например, в приведенном варианте осуществления изобретения - только вверх или вниз. В случае использования подобного устройства для горизонтальной подачи грузоподъемного средства, например, с грузовой платформы подъемника на площадку погрузки-разгрузки, устройство, обеспечивая возможность перемещения грузонесущего средства только в одну сторону, не позволяет производить двустороннюю загрузку и разгрузку грузовой платформы на площадке погрузки-разгрузки, что ограничивает функциональные возможности подъемника.
Наиболее близким по совокупности существенных признаков с заявленным изобретением является погрузочно-разгрузочное устройство для камбузных лифтов и подобных им конструкций по патенту GB N 1032550 (МКИ B 65 G, 1965 г.). Известное устройство обеспечивает перемещение колесного грузонесущего средства (грузовой тележки) с грузовой платформы подъемника на площадку погрузки-разгрузки и позволяет производить двустороннюю загрузку и разгрузку грузовой платформы на площадке погрузки-разгрузки. Известное устройство содержит расположенные на грузовой платформе подъемника две тяговые цепи с шарнирно-сочлененными звеньями, огибающими каждая соответствующие приводное и обводное зубчатые колеса с возможностью перемещения по замкнутой траектории, и являющуюся грузонесущим средством каретку для разъемного соединения посредством устройства сцепления с грузовой тележкой, устанавливаемой на площадку погрузки-разгрузки. Для перемещения каретки используется реечная передача, включающая зубчатую рейку, расположенную на каретке, входящую в зацепление с шестерней, расположенной на платформе подъемника и связанной посредством тяговой цепи с реверсивным электродвигателем. Одновременно при перемещении каретки посредством другой реечной передачи, включающей зубчатую рейку, расположенную на грузовой платформе подъемника, входящую в зацепление с шестерней, расположенной на каретке и связанной посредством второй тяговой цепи с упомянутым устройством сцепления, обеспечивается перемещение последнего совместно с грузовой тележкой относительно каретки.
Недостатком известного устройства является то, что оно имеет ограниченный ход перемещения каретки, который определяется длиной расположенной на каретке зубчатой рейки, входящей в зацепление с расположенной на платформе подъемника шестерней, связанной посредством тяговой цепи с реверсивным электродвигателем. К недостаткам устройства можно отнести также то, что оно обеспечивает относительно невысокие силовые характеристики привода перемещения. Кроме того, устройство предполагает применение реечных зубчатых передач, что усложняет его изготовление и обслуживание.
Задачей, решаемой изобретением, является создание устройства для перемещения грузонесущего средства с грузовой платформы подъемника на площадку погрузки-разгрузки, обеспечивающего возможность двусторонней механизированной загрузки и разгрузки грузовой платформы на площадке погрузки-разгрузки, а также обеспечивающего увеличение хода перемещения грузонесущего средства и силовых характеристик привода перемещения.
Указанная задача решается благодаря тому, что в известном устройстве для перемещения грузонесущего средства с грузовой платформы подъемника на площадку погрузки-загрузки, содержащем расположенные на грузовой платформе подъемника две тяговые цепи с шарнирно-сочлененными звеньями, огибающими каждая соответствующие приводное и обводное зубчатые колеса с возможностью перемещения по замкнутой траектории, и являющуюся грузонесущим средством каретку для разъемного соединения с грузовой тележкой, устанавливаемой на площадку погрузки-разгрузки, согласно изобретению тяговые цепи выполняются в виде цепей одностороннего сворачивания и расположены в направляющих, смонтированных на грузовой платформе подъемника и выполненных каждая с прямолинейным участком, расположенным поперек грузовой платформы подъемника и сопряженным с соответствующим прямолинейным участком направляющей другой тяговой цепи. Каретка установлена с возможностью перемещения по упомянутым прямолинейным участкам направляющих с помощью элементов связи, взаимодействующих с приводными и обводными зубчатыми колесами, которые установлены по концам сопряженных прямолинейных участков направляющих. Конечные звенья каждой тяговой цепи выполнены с возможностью разъемного шарнирного сочленения с кареткой. Каретка при ее расположении посередине сопряженных прямолинейных участков направляющих образует замкнутую цепную передачу соответственно с каждой из упомянутых тяговых цепей. Сопряженные прямолинейные участки направляющих выполнены с возможностью сочленения с прямолинейными направляющими, смонтированными соответственно на каждой площадке погрузки-разгрузки с возможностью совместного перемещения по ним каретки и тяговых цепей.
Вместе с этим смонтированные на каретке элементы связи выполнены в виде расположенных симметрично относительно продольной оси каретки двух рядов роликов, установленных вертикально с шагом в ряду, равным шагу звеньев тяговых цепей.
Кроме того, разъемное шарнирное сочленение тяговых цепей с кареткой выполнено в виде установленного на корпусе каретки рычажно-шарнирного механизма, содержащего балансир с симметрично расположенными на его плечах двуплечими рычагами. Первые плечи двуплечих рычагов выполнены контактирующими с соответствующими роликами каретки. Вторые плечи двуплечих рычагов расположены с возможностью сопряжения между собой и образования каждым вращательной пары с пальцем, закрепленным на конечном звене соответствующей тяговой цепи.
Также устройство дополнительно снабжено подводимой съемной кареткой, выполненной с возможностью разъемного шарнирного сочленения одним своим концом с конечными звеньями упомянутых тяговых цепей и с возможностью перемещения по упомянутым прямолинейным участкам направляющих с помощью смонтированных на подводимой съемной каретке элементов связи, взаимодействующих соответственно с приводными и обводными зубчатыми колесами.
Вместе с этим разъемное шарнирное сочленение тяговых цепей с подводимой съемной кареткой выполнено в виде установленного на корпусе каретки рычажно-шарнирного механизма, содержащего балансир с симметрично расположенными на его плечах двуплечими рычагами. Первые плечи двуплечих рычагов подпружинены относительно корпуса подводимой съемной каретки. Каждое из вторых плечей двуплечих рычагов образует вращательную пару с пальцем соответствующей тяговой цепи.
Технический результат использования предлагаемого устройства состоит в том, что оно обеспечивает двустороннюю механизированную загрузку и разгрузку грузовой платформы подъемника на площадке погрузки-разгрузки, увеличение хода перемещения грузонесущего средства и одновременно возможность минимизации размеров в плане грузовой платформы, например, при использовании подъемника в стесненных условиях.
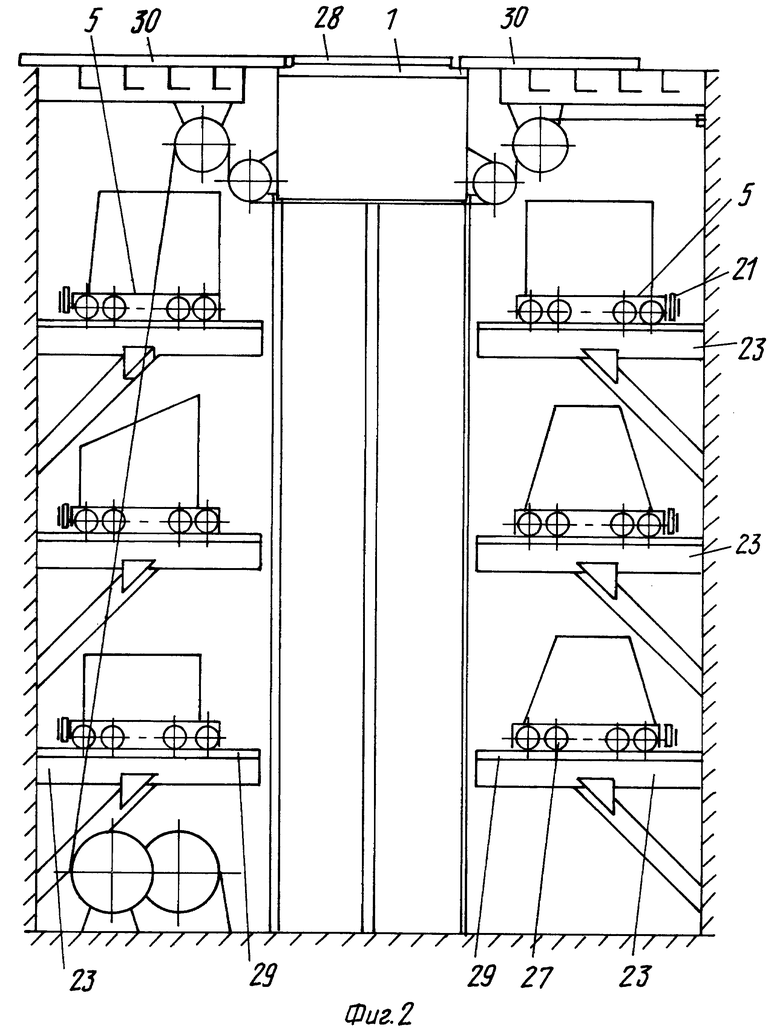
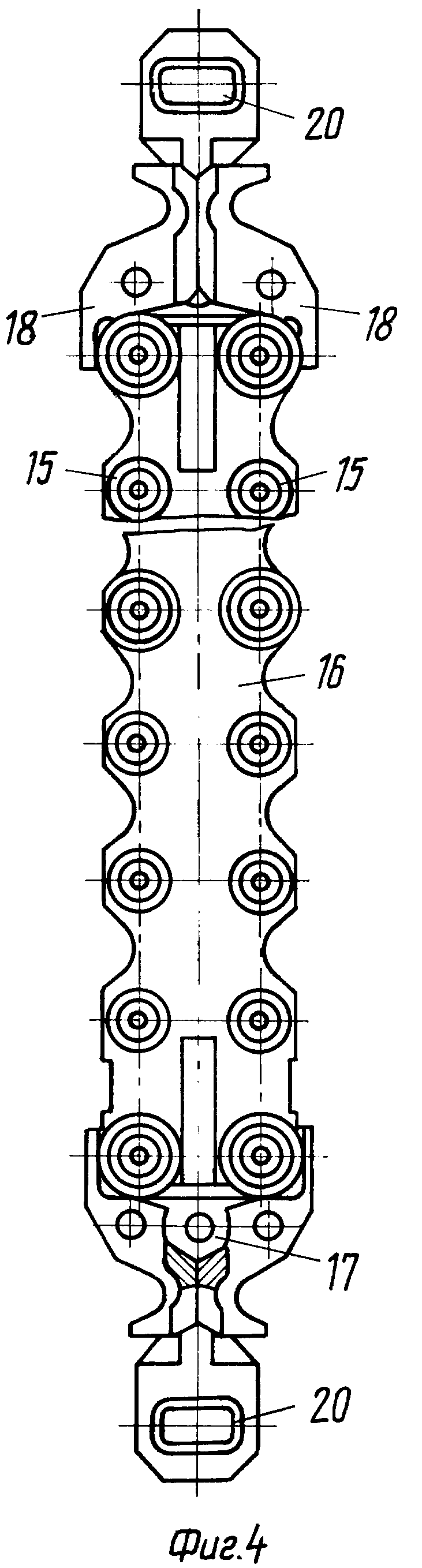
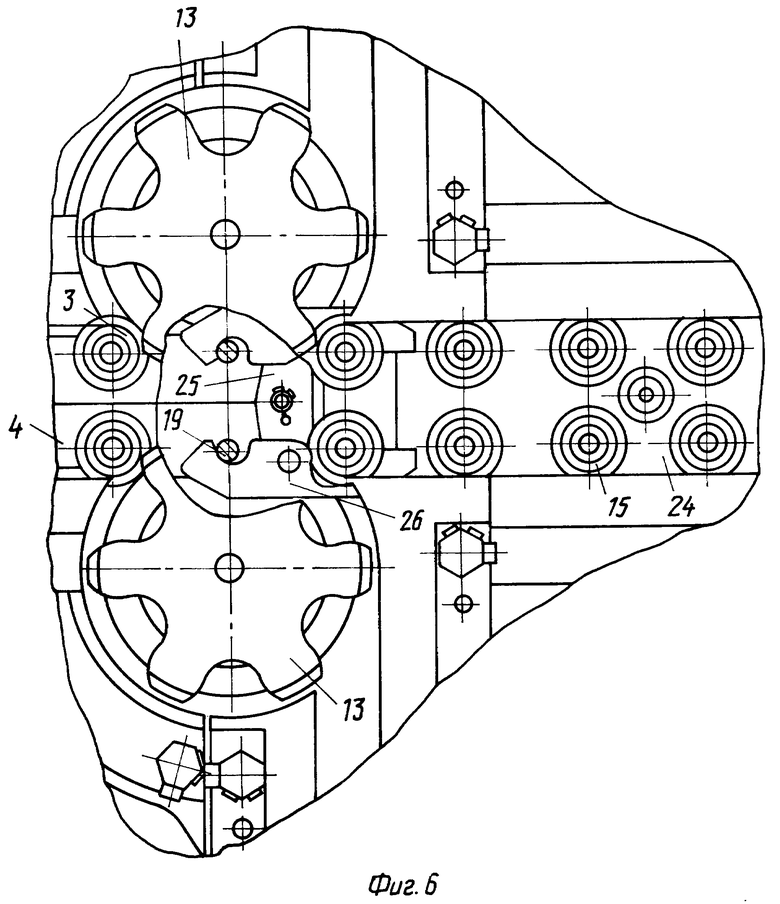
Устройство для перемещения грузонесущего средства с грузовой платформы подъемника на площадку погрузки-разгрузки схематично представлено на чертежах, где на фиг. 1 показано устройство для перемещения грузонесущего средства, вид в плане; на фиг. 2 - грузовая платформа в исходном положении и грузовые тележки, размещенные на площадках погрузки-разгрузки, разрез А-А на фиг. 1; на фиг. 3 - схема взаимодействия тяговых цепей с кареткой при различных направлениях перемещения каретки; на фиг. 4 - каретка, общий вид в плане; на фиг. 5 - грузовая платформа и прямолинейные направляющие, смонтированные на верхней палубе судна; на фиг. 6 - разъемное шарнирное сочленение с подводимой съемной кареткой.
В варианте осуществления изобретения устройство используется в приводе горизонтальной подачи грузовой тележки судового подъемника.
Устройство смонтировано на грузовой платформе 1 судового подъемника и содержит грузонесущее средство 2, взаимодействующее с тяговыми цепями 3 и 4 одностороннего сворачивания с шарнирно-сочлененными звеньями. Грузонесущее средство представляет собой каретку, выполненную с возможностью разъемного соединения с грузовой тележкой 5. Тяговые цепи и каретка размещены в направляющих 6 и 7 сверху грузовой платформы. Направляющая каждой тяговой цепи смонтирована на грузовой платформе с возможностью перемещения цепи по замкнутой траектории. Направляющие 6 и 7 выполнены с прямолинейными участками 8 и 9, сопряженными между собой и расположенными поперек грузовой платформы. За исключением сопряженных прямолинейных участков 8 и 9 направляющие 6 и 7 расположены на периферийной части грузовой платформы. Для защиты от попадания пыли и грязи направляющие 6, 7 закрыты крышками 10, 11. Каждая тяговая цепь огибает соответствующие приводное и обводное зубчатые колеса 12, 13, установленные по концам сопряженных прямолинейных участков 8, 9. Снизу грузовой платформы 1 смонтирован реверсивный привод 14 перемещения тяговых цепей 3 и 4.
В варианте выполнения подъемника грузовая платформа 1 при нахождении ее в крайнем верхнем положении (т.е. на уровне верхней палубы судна) одновременно выполняет роль герметичной крышки проема подъемника.
Каретка 2 установлена с возможностью перемещения по сопряженным прямолинейным участкам 8 и 9 с помощью элементов связи, взаимодействующих с приводными и обводными зубчатыми колесами 12, 13. Элементы связи выполнены в виде расположенных симметрично относительно продольной оси каретки двух рядов роликов 15, установленных вертикально с шагом в ряду, равным шагу звеньев тяговых цепей.
Конечные звенья каждой тяговой цепи выполнены с возможностью разъемного шарнирного сочленения с кареткой 2. В варианте выполнения каждое шарнирное сочленение тяговых цепей с кареткой выполнено в виде установленного на корпусе 16 каретки рычажно-шарнирного механизма, содержащего балансир 17 с симметрично расположенными на его плечах двуплечими рычагами 18. Первые плечи двуплечих рычагов 18 выполнены контактирующими с соответствующими роликами 15 каретки 2, а вторые сопряжены между собой и образуют каждое вращательную пару с соответствующим пальцем 19, закрепленным на конечном звене тяговой цепи. Упомянутые рычажно-шарнирные механизмы смонтированы на концах каретки, при этом каретка смонтирована на грузовой платформе 1 таким образом, что при расположении ее на направляющих грузовой платформы посередине сопряженных прямолинейных участков 8, 9 она посредством упомянутых шарнирных сочленений образует замкнутую цепную передачу соответственно с каждой из тяговых цепей 3 и 4. По концам каретки также выполнены гнезда 20 с возможностью взаимодействия со штырем 21 грузовой тележки 5, благодаря чему обеспечивается разъемное соединение каретки с грузовой тележкой.
Сопряженные прямолинейные участки 8, 9 направляющих грузовой платформы выполнены с возможностью сообщения с прямолинейными направляющими 22, смонтированными на каждой площадке погрузки-разгрузки 23. При нахождении грузовой платформы на уровне площадки погрузки-разгрузки прямолинейные направляющие 22 находятся в створе с сопряженными прямолинейными участками 8, 9. При перемещении каретки 2 один из концов каждой тяговой цепи, находясь в зацеплении с кареткой, перемещается по ней в нужном направлении по прямолинейной направляющей площадки погрузки-разгрузки, другой конец каждой тяговой цепи выходит из зацепления с кареткой и перемещается по направляющим соответственно 6 и 7. Соответственно направлению перемещения каретки свободный конец тяговой цепи перемещается до соответствующего приводного или обводного зубчатого колеса. При этом каретка совершает ход, равный длине тяговой цепи. Таким образом, привод горизонтальной подачи грузовой тележки обеспечивает двустороннюю загрузку и разгрузку грузовой платформы судового подъемника на каждом уровне (ярусе) погрузки-разгрузки подъемника.
Для увеличения хода перемещения каретки 2 устройство снабжено подводимой съемной кареткой 24. Последняя выполнена с возможностью разъемного шарнирного сочленения одним своим концом с конечными звеньями тяговых цепей 3 и 4 и с возможностью перемещения по сопряженным прямолинейным участкам 8 и 9 с помощью элементов связи, взаимодействующих соответственно с приводными и обводными зубчатыми колесами 12, 13. Упомянутые элементы связи подводимой съемной каретки выполнен таким же образом, как и у каретки 2. В варианте выполнения шарнирное сочленение тяговых цепей с подводимой съемной кареткой выполнено в виде установленного на корпусе каретки 24 рычажно-шарнирного механизма, содержащего балансир 25 с симметрично расположенными на его плечах двуплечими рычагами 26. Первые плечи двуплечих рычагов 26 подпружинены относительно корпуса каретки (на чертеже не показано), а вторые образуют каждое вращательную пару с соответствующим пальцем 19, закрепленным на конечном звене тяговой цепи.
В варианте выполнения каждая грузовая тележка 5 имеет четыре пары снабженных ребордами колес 27, установленных с возможностью качения по направляющим 28 - 30, соответственно смонтированным на грузовой платформе 1, площадках погрузки-разгрузки 23 и верхней палубе судна.
В варианте осуществления изобретения судовой подъемник также снабжен приводом подъема грузовой каретки 1, средствами для точной остановки и фиксации каретки 2 на грузовой платформе 1, средствами для фиксации грузовой платформы 1, обеспечивающими заданное положение последней соответственно на каждом уровне погрузки-разгрузки подъемника, и средствами для фиксации грузовых тележек 5 в месте хранения (на площадке погрузки-разгрузки) или на каретке 2, обеспечивающими непрерывное механическое удержание грузовых тележек (на чертеже не показаны).
Устройство для перемещения грузонесущего средства с грузовой платформы подъемника на площадку погрузки-разгрузки работает следующим образом.
В варианте осуществления изобретения в исходном положении грузовая платформа 1 находится в крайнем верхнем положении (на уровне верхней палубы), закрывая проем подъемника и выполняя роль герметичной крышки. Каретка 2 находится посередине сопряженных прямолинейных участков 8, 9 и образует замкнутую цепную передачу с каждой из тяговых цепей 3 и 4. Положение каретки зафиксировано с помощью устройства точной остановки и фиксации каретки на грузовой платформе (на чертеже не показано). Грузовые тележки 5 находятся каждая на соответствующем уровне (ярусе) погрузки-разгрузки и удерживаются посредством соответствующих штырей 21, взаимодействующих с гнездами, выполненными на несущей конструкции площадки погрузки-разгрузки. Для перемещения любой грузовой тележки на другой уровень, например, на верхнюю палубу судна или на свободную площадку погрузки-разгрузки, грузовую платформу 1 опускают до уровня соответствующей площадки погрузки-разгрузки 23. При этом происходит совмещение сопряженных прямолинейных участков 8, 9 направляющих грузовой платформы с прямолинейными направляющими 22 данной площадки погрузки-разгрузки и совмещение направляющих 28 с соответствующими направляющими 29. При достижении грузовой платформой заданного уровня (яруса) погрузки-разгрузки включается привод механизма фиксации грузовой платформы, который в варианте выполнения подъемника объединен с приводом фиксации каретки (на чертеже не показано). В результате срабатывания устройства фиксации каретки оно перестает препятствовать перемещению каретки, взаимодействующей с тяговыми цепями. При работе привода 14 перемещения тяговых цепей 3 и 4 приводные зубчатые колеса 12, взаимодействуя с роликами 15 каретки 2, перемещают последнюю вдоль сопряженных прямолинейных участков направляющих грузовой платформы. При перемещении каретки размыкаются шарнирные сочленения каретки с тяговыми цепями, расположенные по ходу движения спереди каретки. Другие шарнирные сочленения каретки с тяговыми цепями находятся в замкнутом состоянии, в результате чего тяговые цепи в спрямленном положении движутся вслед за кареткой. При дальнейшем движении каретки приводные зубчатые колеса 12 вступают в зацепление с роликами соответствующих тяговых цепей и продолжают продвигать каретку с сопряженных прямолинейных участков направляющих грузовой платформы на прямолинейные направляющие 29 под грузовую тележку 5. После остановки каретки штырь 21, который до этого момента обеспечивал фиксацию грузовой тележки в месте хранения, заводится в соответствующее гнездо 20 каретки (в варианте выполнения подъемника это осуществляется автоматически). В результате каретка соединяется с грузовой тележкой.
При вращении приводных зубчатых колес 12 в обратном направлении каретка совместно с грузовой тележкой перемещается на грузовую платформу. При этом колеса 27 грузовой тележки переходят с направляющих 29 на направляющие 28. После возврата каретки в исходное положение на грузовой платформе производится фиксация каретки в этом положении. При этом связанная с кареткой грузовая тележка занимает строго определенное положение на направляющих 28 грузовой платформы 1, что обеспечивает возможность минимизации размеров грузовой платформы при использовании подъемника в стесненных условиях.
После подъема или опускания платформы на другой уровень и расфиксации каретки последнюю совместно с грузовой тележкой перемещают на площадку погрузки-разгрузки данного уровня (яруса). После расцепления грузовой тележки с кареткой каретку возвращают в исходное положение на грузовой платформе, а грузовую тележку фиксируют на площадке погрузки-разгрузки данного уровня.
В варианте выполнения изобретения предусмотрена возможность увеличения хода перемещения каретки с грузовой тележкой, например, на верхней палубе судна. Для этого после полного выдвижения каретки 2 по направляющим 30, когда свободные конечные звенья тяговых цепей 3, 4 переместятся на сопряженные прямолинейные участки направляющих грузовой платформы 1, к упомянутым конечным звеньям тяговых цепей шарнирно подсоединяют подводимую съемную каретку 24, посредством которой обеспечивают дальнейшее продвижение каретки 2. В другом варианте выполнения (на чертеже не показано) подводимая съемная каретка 24 может быть выполнена с возможностью разъемного сочленения другого своего конца с дополнительными тяговыми цепями, благодаря чему обеспечивается возможность увеличения величины перемещения каретки, которая, помимо габарита площадки погрузки-разгрузки, ограничивается, практически, только мощностью привода 14 перемещения тяговых цепей.
Таким образом, благодаря особенности исполнения устройства для перемещения грузонесущего средства с грузовой платформы подъемника на площадку погрузки-разгрузки, изобретение обеспечивает двустороннюю механизированную загрузку и разгрузку грузовой платформы подъемника на площадке погрузки-разгрузки и одновременно возможность минимизации размеров в плане грузовой платформы при использовании подъемника в стесненных условиях. Вместе с этим благодаря совместной работе двух тяговых цепей одностороннего сворачивания изобретение обеспечивает более высокие силовые и прочностные характеристики привода перемещения грузонесущего средства, а также более высокие жесткостные характеристики рабочего (толкающего) органа, что в конечном итоге позволяет снизить материалоемкость устройства.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ПЕРЕДАЧИ ЖИДКОГО ГРУЗА ПРЕИМУЩЕСТВЕННО С МОРСКОЙ СТАЦИОНАРНОЙ ПЛАТФОРМЫ НА ТАНКЕР | 2000 |
|
RU2196070C2 |
| УСТРОЙСТВО ДЛЯ ОСТАНОВКИ КАРЕТКИ, ВЗАИМОДЕЙСТВУЮЩЕЙ С ТЯГОВОЙ ЦЕПЬЮ | 1998 |
|
RU2137691C1 |
| УСТРОЙСТВО ДЛЯ ПЕРЕДАЧИ ЖИДКОГО ГРУЗА, ПРЕИМУЩЕСТВЕННО С МОРСКОЙ СТАЦИОНАРНОЙ ПЛАТФОРМЫ НА ТАНКЕР | 1999 |
|
RU2162044C1 |
| СУДОВОЙ ПОДЪЕМНИК | 2012 |
|
RU2497743C1 |
| СПОСОБ ПОГРУЗКИ КОНТЕЙНЕРА НА ТРАНСПОРТНУЮ ПЛАТФОРМУ И ТРАНСПОРТНЫЙ АГРЕГАТ ДЛЯ ОСУЩЕСТВЛЕНИЯ СПОСОБА | 1998 |
|
RU2133704C1 |
| ГРУЗОПОДЪЕМНОЕ УСТРОЙСТВО | 2000 |
|
RU2193517C2 |
| ИЗОТЕРМИЧЕСКИЙ КОНТЕЙНЕР | 1999 |
|
RU2165066C1 |
| ЖЕЛЕЗНОДОРОЖНЫЙ КРАН | 2000 |
|
RU2176615C2 |
| СПАСАТЕЛЬНЫЙ ЛЮК УСТРОЙСТВА ДЛЯ ШЛЮЗОВАНИЯ ПОДВОДНИКОВ | 2000 |
|
RU2184048C2 |
| ГРУЗОВОЙ ПРИВОД С ПЕРЕМЕННОЙ СИЛОЙ ТЯГИ ДЛЯ ОТВОДА ПЛОЩАДКИ ОБСЛУЖИВАНИЯ ОТ БОРТА РАКЕТЫ-НОСИТЕЛЯ | 2000 |
|
RU2182104C2 |


Устройство содержит расположенные на грузовой платформе подъемника две тяговые цепи с шарнирно-сочлененными звеньями, огибающими каждая соответствующие приводное и обводное зубчатые колеса с возможностью перемещения по замкнутой траектории, и являющуюся грузонесущим средством каретку для разъемного соединения с грузовой тележкой, устанавливаемой на площадку погрузки-разгрузки. Тяговые цепи выполнены в виде цепей одностороннего сворачивания и расположены в направляющих, смонтированных на грузовой платформе подъемника, при этом конечные звенья каждой тяговой цепи выполнены с возможностью разъемного шарнирного сочленения с кареткой, которая при ее расположении посередине сопряженных прямолинейных участков направляющих образует замкнутую цепную передачу соответственно с каждой из упомянутых тяговых цепей. Сопряженные прямолинейные участки направляющих выполнены с возможностью сообщения с прямолинейными направляющими, смонтированными соответственно на каждой площадке погрузки-разгрузки с возможностью совместного перемещения по ним каретки и тяговых цепей. Технический результат заключается в увеличении хода грузонесущего средства. 4 з.п.ф-лы, 6 ил.
| Способ изготовления ротора с постоянными магнитами | 1982 |
|
SU1032550A1 |
| US 3724699 A, 03.04.1973 | |||
| EP 0405471 A1, 02.01.1991 | |||
| Перегрузочное устройство стеллажного склада | 1982 |
|
SU1068352A1 |
| УСТРОЙСТВО ЗАГРУЗКИ ДЛЯ МОРОЗИЛЬНИКА ПЛАСТИНЧАТОГО ТИПА | 1990 |
|
RU2040743C1 |

