Изобретение относится к транспортирующим устройствам и может быть использовано для точной остановки грузоносителей в конвейерных система.
Известно устройство для остановки каретки, содержащее привод перемещения каретки и устройство для точного останова (авт.св. СССР N 927668, МПК3 B 65 G 47/00, 1979 г.). Последнее включает в себя силовой цилиндр, закрепленный на неподвижной раме, выполненный с двумя штоками. Один шток силового цилиндра соединен с подвижной рамой, установленной на направляющих, также закрепленных на неподвижной раме. На подвижной раме шарнирно установлен откидной подпружиненный упор. Второй шток силового цилиндра расположен в других направляющих и шарнирно соединен с дополнительным упором в виде двуплечего рычага, свободное плечо которого заканчивается скругленной кромкой.
В известном устройстве каретка останавливается при наезде на конечный выключатель. Привод перемещения каретки выключается после того, как каретка, повернув откидной подпружиненный упор, проедет мимо него и освободит его. Под действием пружины откидной упор возвращается в рабочее положение, а конечный выключатель, отключив привод перемещения каретки, дает команду на включение силового цилиндра. Цилиндр одним из штоков перемещает подвижную раму с откидным подпружиненным упором по направляющим. При этом упомянутый упор наезжает на каретку, а другой шток цилиндра, двигаясь в соответствующих направляющих, поворачивает двуплечий рычаг (дополнительный упор), поджимая его скругленную кромку к каретке. Таким образом, силовой цилиндр, охватив каретку откидным подпружиненным упором и двуплечим рычагом, тем же движением устанавливает каретку в постоянном месте, соответствующем расположению каретки точно на заданном месте. Устройство обеспечивает точную остановку каретки и ее надежную фиксацию в точном положении.
Однако известное устройство имеет достаточно большие массогабаритные характеристики и предполагает установку на неподвижном основании, что, в частности, связано с применением в качестве исполнительного органа силового цилиндра, предполагающего наличие пневмо- или гидросистемы.
Наиболее близким по совокупности существенных признаков с заявленным изобретением является устройство, содержащееся в описании изобретения по авт. св. СССР N 1253898, МПК4 B 65 G 17/06, 1984 г. Известное устройство содержит каретку, взаимодействующую с тяговой цепью через смонтированные на ней элементы связи, привод перемещения тяговой цепи и устройство останова. Элементы связи выполнены в виде неподвижно закрепленных на каретке планок с впадинами под ролики тяговой цепи. На каретке с возможностью качения по направляющим смонтированы ролики. Устройство останова включает звездочку, приводимую во вращение тяговой цепью, обойму с расположенными по ее окружности цевками, фрикционный тормоз и полумуфту. Траектория движения тяговой цепи в местах размещения устройств останова выполнена с изогнутыми участками с возможностью разъединения их с элементами связи каретки посредством смонтированных на раме отклоняющих роликов. Обойма с цевками установлена внутри изогнутого участка с возможностью размещения цевок во впадинах планок, снабжена тормозом и связана с тяговой цепью посредством муфты и взаимодействующей с ней тяговой цепью звездочки. Звездочка через зубчатую передачу связана с полумуфтой, которая имеет подпружиненный фрикционный диск, имеющий возможность перемещаться поступательно относительно полумуфты. Обойма с цевками установлена с зазором и соосно с фрикционным диском, полумуфтой и тормозом на оси; последняя имеет возможность перемещаться в направляющих поперек рамы. Ось связана с копиром, который приводится в движение электромагнитами.
Остановка каретки в известном устройстве происходит следующим образом. При подаче команды на электромагнит он срабатывает и перемещает копир и связанную с ним ось, которая прижимает обойму с цевками к фрикционному тормозу. В устройстве останова тяговая цепь отклоняющими роликами отклоняется вниз и выводится из зацепления с закрепленной на каретке планкой. Каретка движется на роликах по направляющим до тех пор, пока последняя впадина планки не выйдет из зацепления с тяговой цепью. Одновременно планка входит в зацепление с цевками обоймы, которая соединена муфтой с тормозом, и каретка останавливается. Для дальнейшего перемещения каретки подают команду на другой электромагнит, который перемещает копир, ось, обойму с цевками и прижимает последнюю к фрикционному диску. Фрикционный диск, закрепленный в полумуфте, вращается вместе с ней, так как связан через зубчатую передачу со звездочкой, вращаемой движущейся тяговой цепью, поэтому планка каретки проталкивается цевками обоймы и вводится в зацепление с роликами тяговой цепи. В результате каретка начинает перемещаться совместно с тяговой цепью.
Недостатком известного устройства для остановки каретки является его достаточно высокая сложность, а также то, что оно не обеспечивает точной остановки каретки. Кроме того, устройство не предполагает обеспечения фиксации каретки при ее остановке.
Задачей, решаемой изобретением, является обеспечение точной остановки каретки с грузовой тележкой на грузовой площадке подъемника для минимизации требуемых размеров грузовой площадки при использовании подъемника в стесненных условиях.
Указанная задача решается благодаря тому, что известное устройство для остановки каретки, взаимодействующей с тяговой цепью, содержащее привод перемещения тяговой цепи и устройство останова, согласно изобретению снабжено рычагом, установленным на валу приводной звездочки привода перемещения тяговой цепи. Рычаг выполнен с возможностью взаимодействия с центрирующим его шарнирно-рычажным зажимом, кинематически связанным с приводом зажима.
Технический результат использования предлагаемого устройства состоит в том, что оно обеспечивает точное положение места остановки каретки и при этом фиксацию каретки в точном положении.
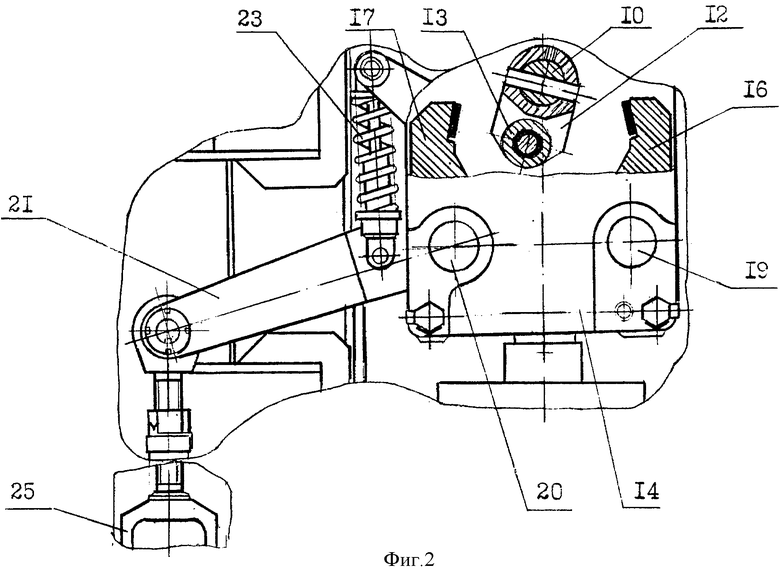
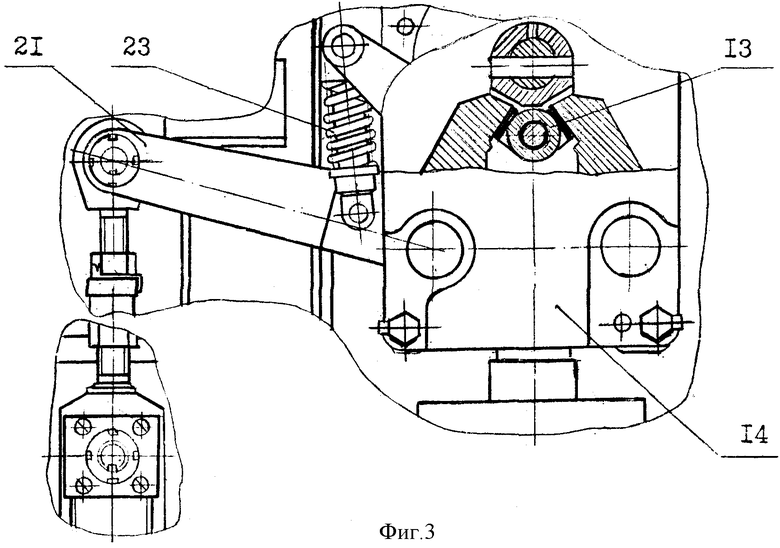
На фиг. 1 схематично показано устройство для остановки каретки, взаимодействующей с тяговой цепью, вид сверху; на фиг. 2 - рычаг с роликом, закрепленным на валу приводной звездочки тяговой цепи, и центрирующий его шарнирно-рычажный механизм, общий вид (в одном из возможных положений рычага с роликом при остановке каретки после срабатывания устройства останова); на фиг. 3 - то же, когда каретка занимает точное положение.
В варианте осуществления изобретения устройство используется в цепном приводе горизонтальной подачи грузовой тележки на грузовую площадку судового подъемника.
Устройство смонтировано на грузовой площадке 1 судового подъемника и содержит каретку 2, взаимодействующую с тяговыми цепями 3, 4 одностороннего сворачивания, и устройство останова, включающее закрепленный на каретке 2 копир 5, взаимодействующий с конечным путевым выключателем 6 привода перемещения тяговой цепи (на чертеже не показан). Тяговые цепи 3, 4 и каретка 2 размещены в направляющих 7-9 сверху площадки 1.
Посредством каретки 2 осуществляется подача на грузовую площадку 1 грузовой тележки (на чертеже не показана), выполненной в возможностью разъемного соединения с кареткой. При подъеме-опускании грузовой площадки 1 каретка 2 располагается симметрично относительно продольной оси грузовой площадки 1 и имеет зацепление с передними (конечными) звеньями обеих тяговых цепей 3, 4, образую замкнутую цепную передачу. На валу 10 приводной звездочки 11 привода перемещения тяговой цепи установлен рычаг 12, снабженный роликом 13. Рычаг 12 выполнен с возможностью взаимодействия посредством ролика 13 с центрирующим его шарнирно-рычажным зажимом 14, кинематически связанным с приводом зажима 15. В варианте осуществления изобретения привод зажима объединен с приводом механизма фиксации грузовой площадки, обеспечивающим заданное положение грузовой площадки соответственно на каждом ярусе погрузки-разгрузки подъемника (на чертеже не показано).
В варианте выполнения зажим 14 выполнен в виде шарнирно-рычажного механизма, включающего два двуплечих рычага 16, 17, шарнирно связанных между собой тягой 18 и установленных с возможностью зажима ролика 13 при их повороте соответственно относительно оси 19 и вала 20. На валу 20 жестко закреплен рычаг 21, шарнирно связанный с ползуном 22. С рычагом 21 взаимодействует пружина 23, которая обеспечивает раскрывание зажима 14. На свободном конце ползуна 22 выполнен продольный паз, в котором размещен палец 24, закрепленный на ползуне 25 привода механизма фиксации грузовой площадки.
Цепной привод горизонтальной подачи грузовой тележки обеспечивает двустороннюю загрузку и разгрузку грузовой площадки подъемника, для чего на каждом ярусе погрузки-разгрузки с двух сторон грузового проема предусмотрены направляющие (на чертеже не показаны) для каретки 2, которые при нахождении грузовой площадки 1 на данном ярусе находятся в створе с направляющими 9, выполненными на грузовой площадке. При перемещении каретки один из концов каждой тяговой цепи 3. 4, находясь в зацеплении с кареткой, перемещается с ней в нужном направлении по направляющей яруса погрузки-разгрузки, другой конец каждой тяговой цепи выходит из зацепления с кареткой и перемещается по направляющим соответственно 7, 8 до оборотной звездочки 26. При этом каретка совершает ход, равный длине тяговой цепи.
Устройство для остановки каретки, взаимодействующей с тяговой цепью, работает следующим образом.
Привод перемещения тяговой цепи перемещает каретку 2 с грузовой тележкой (или одну каретку в случае возврата разгруженной каретки) на грузовую площадку 1. При подходе каретки к заданному положению на грузовой площадке копир 5 каретки взаимодействует с конечным путевым выключателем 6, который выдает сигнал на отключение электродвигателя привода перемещения тяговой цепи, и каретка останавливается в заданном положении относительно грузовой площадки 1. Поскольку силы инерции, действующие в цепном приводе горизонтальной подачи грузовой тележки, непостоянны вследствие ее различной загрузки и, кроме того, имеются люфты в кинематической цепи привода при выключении привода перемещения тяговой цепи, вероятность точной остановки каретки невелика. После выключения привода перемещения тяговой цепи ролик 13 рычага 12, установленного на валу 10 приводной звездочки 11, может занимать различное положение между разведенными двуплечими рычагами 16, 17 зажима 14 относительно своего среднего ("нулевого") положения, которое соответствует точному положению каретки 2 на грузовой площадке 1. Перед подъемом-опусканием грузовой площадки судового подъемника необходимо обеспечить точное положение каретки с грузовой тележкой относительно грузовой площадки с тем, чтобы грузовая площадка с кареткой могла беспрепятственно проходить через грузовой проем, кроме того, необходимо расфиксировать грузовую площадку. Для этого включают привод механизма фиксации грузовой площадки. При работе привода механизма фиксации, который в варианте осуществления изобретения объединен с приводом зажима, происходит линейное перемещение ползуна 25. Одновременно с ползуном 25 перемещается палец 24, размещенный в продольном пазу ползуна 22. При этом вначале выбирается зазор в пазу вдоль направления перемещения пальца 24 (холостой ход привода зажима), после чего происходит перемещение ползуна 22, в результате которого поворачивается рычаг 21, жестко закрепленный на валу 20, и одновременно сжимается пружина 23. При повороте вала 20 происходит сведение двухплечих рычагов 16, 17 зажима 14. При этом двуплечий рычаг, к которому оказывается ближе ролик 13, взаимодействует с роликом 13 и доворачивает рычаг 12 в "нулевое" положение, при котором происходит зажим ролика 13 обоими двуплечими рычагами 16, 17. Одновременно происходит доворот вала 10 и связанной с ним приводной звездочки 11 привода перемещения тяговой цепи. В результате каретка с грузовой тележкой занимает точное положение относительно грузовой площадки 1.
После этого можно производить подъем-опускание грузовой площадки. При достижении грузовой площадкой заданного яруса погрузки-разгрузки включается привод механизма фиксации грузовой площадки. В результате перемещения ползуна 25 закрепленный на нем палец 24 прекращает препятствовать перемещению ползуна 22, кинематически связанного с подпружиненным рычагом 21. Рычаг 21 совместно с валом 20 поворачивается под действием пружины 23 и раскрывает зажим 14, который больше не препятствует вращению вала 10 приводной звездочки 11 привода перемещения тяговой цепи, а следовательно, не препятствует и перемещению каретки, взаимодействующей с тяговой цепью.
Таким образом, благодаря особенности исполнения устройства для остановки каретки, взаимодействующей с тяговой цепью, изобретение позволяет обеспечить точное положение места каретки на грузовой площадке судового подъемника и фиксацию каретки в точном положении. В результате достигается возможность минимизации требуемых размеров грузовой площадки при использовании подъемника в стесненных условиях.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ПЕРЕМЕЩЕНИЯ ГРУЗОНЕСУЩЕГО СРЕДСТВА С ГРУЗОВОЙ ПЛАТФОРМЫ ПОДЪЕМНИКА НА ПЛОЩАДКУ ПОГРУЗКИ-РАЗГРУЗКИ | 1999 |
|
RU2152340C1 |
| УСТРОЙСТВО ФИКСАЦИИ ГРУЗОВОЙ ТЕЛЕЖКИ | 1998 |
|
RU2148547C1 |
| СУДОВОЙ ПОДЪЕМНИК | 2012 |
|
RU2497743C1 |
| ПОДЪЕМНИК | 1993 |
|
RU2061648C1 |
| УСТРОЙСТВО ДЛЯ ПОДЪЕМА ДЛИННОМЕРНЫХ КОНСТРУКЦИЙ | 1995 |
|
RU2076840C1 |
| ОПТИЧЕСКОЕ УСТРОЙСТВО | 1997 |
|
RU2119681C1 |
| Загрузочное устройство | 1982 |
|
SU1090640A1 |
| ТРАНСПОРТНО-СТЫКОВОЧНАЯ ТЕЛЕЖКА | 1992 |
|
RU2045423C1 |
| РУЧНОЙ ИНСТРУМЕНТ ДЛЯ РАСПИЛОВКИ ПРЕИМУЩЕСТВЕННО МЯСНЫХ ТУШ | 1996 |
|
RU2107438C1 |
| ПОДЪЕМНИК | 1992 |
|
RU2035373C1 |
Изобретение относится к транспортирующим устройствам. Изобретение обеспечивает точное положение места остановки каретки и фиксацию каретки в данном положении. Устройство содержит привод перемещения тяговой цепи, взаимодействующей с кареткой, и устройство останова, включающее закрепленный на каретке копир, взаимодействующий с конечным путевым выключателем привода перемещения тяговой цепи. На валу приводной звездочки привода перемещения тяговой цепи установлен рычаг, снабженный роликом. Рычаг выполнен с возможностью взаимодействия посредством ролика с центрирующим его шарнирно-рычажным зажимом, кинематически связанным с приводом зажима. 3 ил.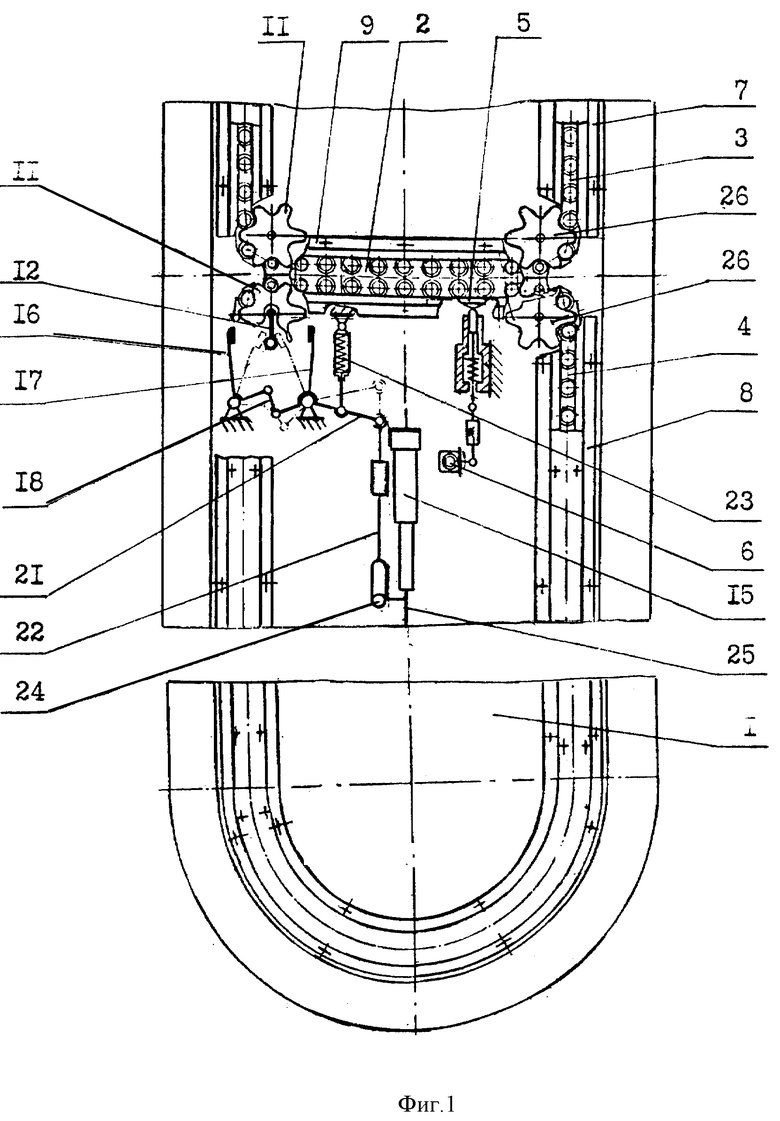
Устройство для остановки каретки, взаимодействующей с тяговой цепью, содержащее привод перемещения тяговой цепи и устройство останова, отличающееся тем, что оно снабжено рычагом, установленным на валу приводной звездочки привода перемещения тяговой цепи, выполненным с возможностью взаимодействия с центрирующим его шарнирно-рычажным зажимом, кинематически связанным с приводом зажима.
| Тележечный конвейер | 1984 |
|
SU1253898A1 |
| Устройство для останова | 1979 |
|
SU927668A1 |
| Шаговый конвейер | 1988 |
|
SU1548123A1 |
| Загрузочное устройство | 1982 |
|
SU1090640A1 |
| Тележечный конвейер | 1975 |
|
SU575283A1 |

