Изобретение относится к области быстродействующих устройств для отвода площадок обслуживания (ПО) от бортов ракет-носителей (РН), установленных на своих пусковых устройствах (ПУ).
Предлагаемый грузовой привод предназначается для быстрого отвода ПО от борта РН "Протон", установленной на своем ПУ.
Для быстрого отвода ПО от бортов РН используются как правило устройства в виде гидропневмоприводов, поворачивающих рычаги (стрелы), на которых закреплены ПО, и тем самым отводящих ПО от бортов РН. Однако надежность этих устройств ограничивается надежностью многочисленных гидравлических, электрических и пневматических устройств, входящих в их системы управления. С целью увеличения общей надежности вышеуказанных приводив элементы, входящие в системы управления приводами, дублируются, а иногда троируются, что существенно усложняет эти системы.
Предлагаемый грузовой привод с переменной силой тяги направлен на увеличение надежности привода отвода ПО до предельно близкой к 1 без усложнения его системы управления. Такая надежность предлагаемого привода обеспечивается тем, что в качестве силы, отводящей ПО, в нем используется сила земной гравитации, а конструкция привода включает в себя в основном механические узлы и детали с надежностью, равной 1.
Известны очень надежные грузовые приводы, использующие силу земной гравитации, например, в спортивных тренажерах, где груз (или грузы) обеспечивают возврат элементов (рычагов, рукояток, перекладин) в исходное положение после прекращения действия на них сил рук или ног спортсмена.
Известны также и грузовые приводы промышленного назначения. Известен, например, грузовой привод токоподвода к самоходному механизму с ограниченной длиной передвижения по патенту РФ 2098341 от 10.12.97 г., МПК В 66 С 13/12 "Токоподвод к самоходному механизму с ограниченной длиной передвижения". Этот привод содержит, в частности, гибкий тяговый элемент (трос), прикрепленный одним концом к подвижной по рельсам каретке, а другим с использованием полиспаста обратного действия к грузу, перемещающемуся по вертикальным направляющим в пределах их высоты.
Описанная конструкция грузового привода по количеству совпадающих признаков является ближайшим аналогом предлагаемого грузового привода с переменной силой тяги. Однако использование описанного грузового привода по патенту РФ 2098341 для отвода ПО от борта РН невозможно, т.к. он создает постоянное усилие в тяговом элементе (тросе), в то время как для отвода ПО требуется переменное (уменьшающееся) усилие в тросе в процессе движения (опускания) груза в нижнее положение. Это требование обусловливается тем, что в начальный момент отвода ПО для преодоления сил инерции ПО требуется max. усилие в тяговом тросе, а по мере разгона ПО это усилие должно плавно уменьшаться и становиться min. при подходе ПО к своему крайнему (отведенному) положению.
Уменьшение усилия в тяговом тросе при приближении ПО к крайнему (отведенному) положению необходимо для снижения инерционной силы разогнанной ПО и упрощения устройств для ее торможения. Таким образом, постоянное усилие в тросе привода по патенту РФ 2098341 является недостатком при использовании его для отвода ПО от борта РН.
Указанный выше технический результат достигается тем, что в грузовом приводе для отвода площадки обслуживания от борта ракеты-носителя, содержащем вертикально подвижный груз и тяговый трос, присоединенный одним концом через полиспаст обратного действия к грузу, а другим концом к площадке обслуживания, груз выполнен в виде группы цепей, например якорных, расположенных с возможностью самопроизвольной укладки их в процессе движения вниз в цепной ящик, а конец тягового троса, присоединенный к площадке обслуживания, прикреплен к ней с возможностью регулирования его длины через барабан лебедки с самотормозящимся приводом, установленной на площадке обслуживания.
Группа цепей может быть присоединена к полиспасту обратного действия тягового троса через вертикально подвижную в направляющих траверсу.
Привод может быть снабжен стопором для удержания через стопорную тягу траверсы с группой цепей в крайнем верхнем положении, причем стопорная тяга шарнирно сочленена с площадкой обслуживания и снабжена вилкой для шарнирного сочленения с крюком стопора.
Упомянутый стопор может быть размещен ниже площадки обслуживания на ее неподвижном основании и выполнен самораскрывающимся от хода стопорной тяги после отпирания его блокирующего устройства.
Цепной ящик может быть снабжен удароустойчивым полом.
На фиг.1 изображен вид сбоку на площадку обслуживания РН с грузовым приводом отвода с переменной силой тяги.
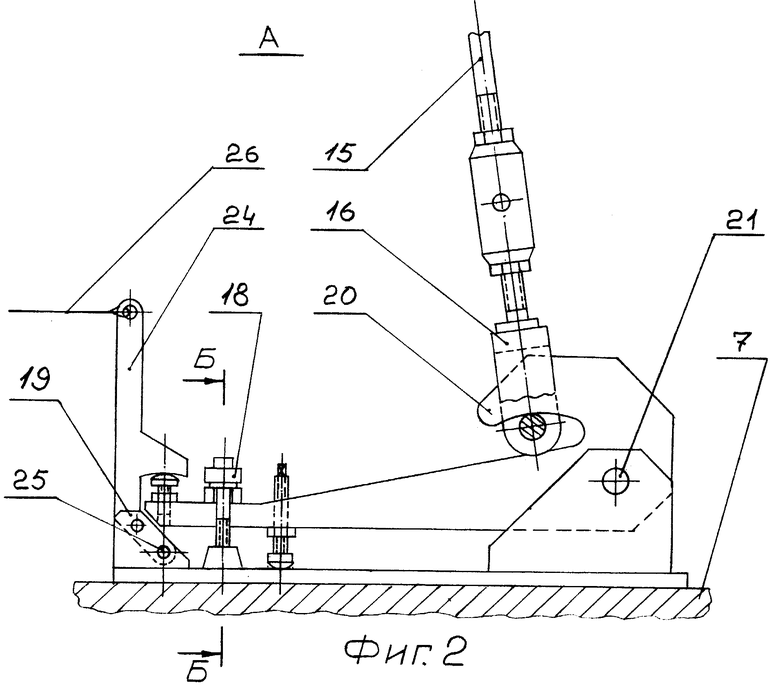
На фиг.2 изображена выноска А (фиг.1).
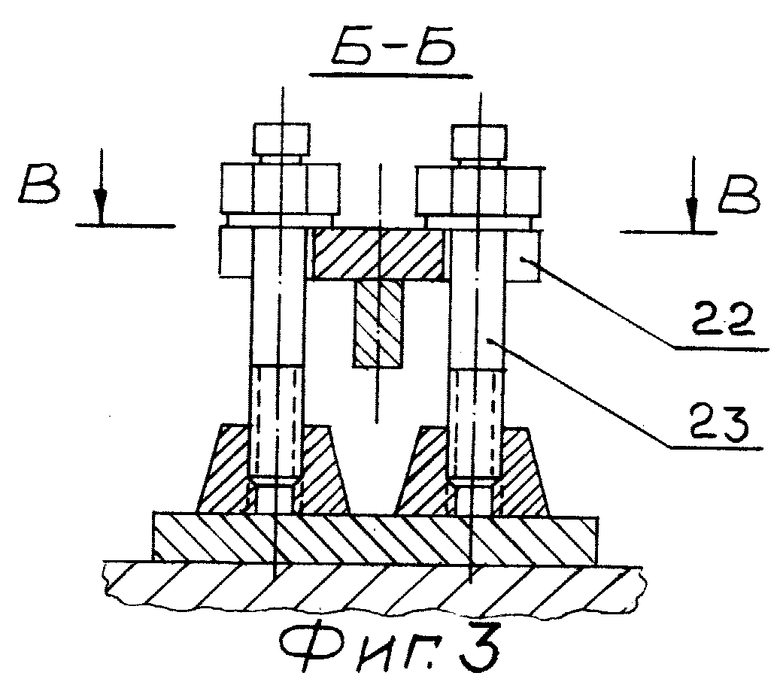
На фиг.3 изображено сечение Б-Б (фиг.2).
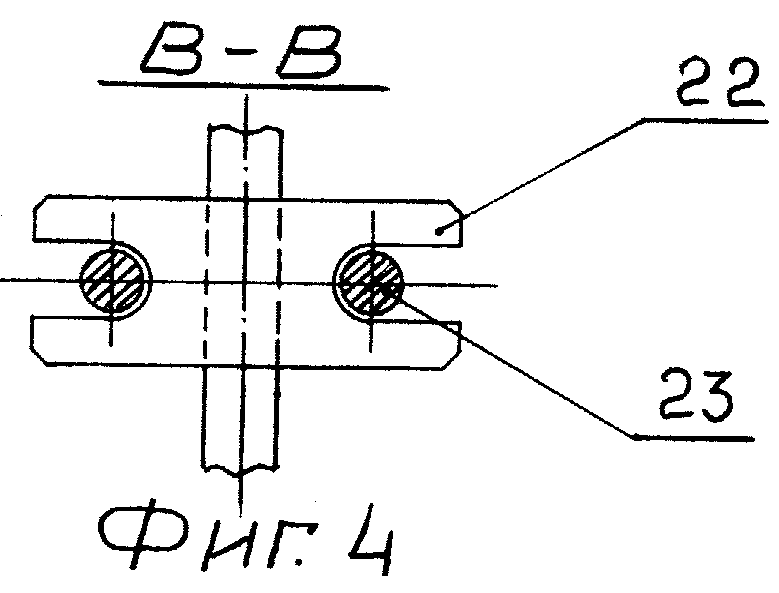
На фиг.4 изображено сечение В-В (фиг.3).
Грузовой привод с переменной силой тяги состоит (см. фиг.1) из двух параллельных тяговых тросов 1, закрепленных каждый одним концом к барабану 2 лебедки 3 с самотормозящимся приводом, установленной на площадке обслуживания 4, сочлененной поворотными в вертикальной плоскости парными рычагами 5 и 6 с основанием 7, на котором установлены регулируемые по высоте упоры 8, ограничивающие поворот рычагов 5 и обеспечивающие, тем самым, надлежащий зазор между бортом РН и площадкой обслуживания 4. Другой конец каждого тягового троса 1 присоединен через отклоняющий блок 9 и полиспаст 10 к траверсе 11, подвижной в направляющих 12. К траверсе 11 закреплена группа цепей 13, нижние концы которых размещаются в цепном ящике 14, не достигая, однако, его пола. Площадка обслуживания 4 с помощью стопорной тяги 15 с вилкой 16, симметрично размещенной между рычагами 5 и 6 (см. фиг. 2), связана с основанием 7 через самораскрывающийся ходом стопорной тяги 15 площадки обслуживания 4 стопор 17, снабженный (см. фиг.2, 3 и 4) пироэлектрическим 18 и ручным 19 блокирующими устройствами и крюком 20 с осью 21. В пироэлектрическом блокирующем устройстве применены траверса 22 и пироболты 23, удерживающие крюк 20 от поворота вокруг оси 21, а в ручном блокирующем устройстве 19 для удерживания крюка 20 от поворота вокруг оси 21 применен рычаг 24, поворотный вокруг оси 25 с помощью гибкой тяги 26. Рычаги 5 сочленены с гидродомкратами 27, обеспечивающими подвод площадки обслуживания 4 к борту РН, т.е. в рабочее положение из нерабочего положения у лифтовой башни 28, в которой размещен лифт для доступа персонала на площадку обслуживания 4 в ее нерабочем положении. Гидродомкраты 27 кроме подвода площадки обслуживания 4 к борту РН обеспечивают ее торможение при подходе к нерабочему положению у лифтовой башни 28. Отклоняющие блоки 9 и направляющие 12 траверс 11 размещены на наружных боковых поверхностях лифтовой башни 28. По рычагам 5 и 6 проложены необходимые для обслуживания и заправки РН наземные коммуникации, а по рычагам 6 еще и трапы для доступа персонала на площадку обслуживания 4 в ее рабочем (у борта РН) положении.
Работает грузовой привод с переменной силой тяги следующим образом.
Для подвода площадки обслуживания 4 из отведенного положения к борту РН, т. е. в рабочее положение, в гидродомкраты 27 от насосной станции подается давление, вследствие чего их штоки начинают выдвигаться и поворачивать рычаги 5 и 6 до упора рычагов 5 в упоры 8. При этом площадка обслуживания 4 оказывается подведенной к борту РН с надлежащим зазором, а траверсы 11 - поднятыми в верхнее положение вместе с группами цепей 13, нижние концы которых в этом положении траверс 11 оказываются поднятыми над уровнем пола цепных ящиков 14 на некоторую высоту, заранее отрегулированную с помощью лебедок 3. В этом положении в тяговых тросах 1 возникают усилия от полного веса групп цепей 13, необходимые для разгона площадки обслуживания 4 на начальном участке ее отвода. После окончания подвода площадки обслуживания к борту РН вилка 16 стопорной тяги 15 заводится в крюк 20 стопора 17, а сам крюк 20 фиксируется в закрытом положении блокирующими устройствами 18 иди 19, после чего сбрасывается давление в гидродомкратах 27, а сами гидродомкраты 27 и их гидросистема переводится в тормозной режим. После сброса давления в гидродомкратах 27 в стопорной тяге 15 площадки обслуживания 4 возникает усилие от сил тяги тяговых тросов 1, приложенных к площадке обслуживания 4 и стремящейся отвести ее от борта РН, повернув при этом рычаги 5 и 6. Усилие стопорной тяги 15 препятствует таким образом отводу площадки обслуживания 4 от борта РН до тех пор пока в стопорной тяге 15 это усилие есть.
Для отвода площадки обслуживания 4 от борта РН после окончания обслуживания РН или ее заправки блокирующие устройства 18 или 19 стопора 17 разблокируются (вручную с помощью гибкой тяги 26 или подачей электросигнала), вследствие чего крюк 20 вилкой 16 под действием усилия в стопорной тяге 15 поворачивается вокруг оси 21 и освобождает стопорную тягу 15. Освобожденная от усилия стопорной тяги 15 площадка обслуживания 4 начинает движение (разгон) от полного веса группы цепей 13, которые, опускаясь, достигают через некоторое время своими нижними концами (звеньями) полов цепных ящиков 14 и, самопроизвольно складываясь в компактные массы, постепенно уменьшают вес, приложенной к траверсе 11. В результате этого постепенно уменьшаются и усилия в тяговых тросах 1, что обеспечивает снижение скорости движения площадки обслуживания 4 и снижение силы ее инерции при подходе к лифтовой башне 28 (т.е. в нерабочее положение), что в свою очередь облегчает работу гидродомкратов 27 в качестве тормозов.
Таким образом, использование цепей в предлагаемом грузовом приводе не по прямому их назначению, а в качестве груза придает этому приводу новое положительное качество - изменение (уменьшение) тягового усилия груза по мере его опускания из наивысшего в наинизшее положение.
Изобретение относится к устройствам для отвода площадок обслуживания от бортов ракет-носителей. Грузовой привод для отвода площадки обслуживания от борта ракеты-носителя содержит вертикально подвижный груз и тяговый трос, присоединенный одним концом через полиспаст обратного действия к грузу, а другим концом - к площадке обслуживания. Груз выполнен в виде группы цепей, например якорных, расположенных с возможностью самопроизвольной укладки их в процессе движения вниз в цепной ящик, а конец тягового троса, присоединенный к площадке обслуживания, прикреплен к ней с возможностью регулирования его длины через барабан лебедки с самотормозящим приводом, установленной на площадке обслуживания. Группа цепей присоединена к полиспасту обратного действия тягового троса через вертикально подвижную в направляющих траверсу. Привод снабжен стопором для удержания через стопорную тягу траверсы с группой цепей в крайнем верхнем положении, причем стопорная тяга шарнирно сочленена с площадкой обслуживания и снабжена вилкой для шарнирного сочленения с крюком стопора. Упомянутый стопор размещен ниже площадки обслуживания на ее неподвижном основании и выполнен самораскрывающимся от хода стопорной тяги после отпирания его блокирующего устройства. Цепной ящик снабжен удароустойчивым полом. Изобретение обеспечивает возможность изменения усилия, действующего в процессе отвода площадки. 4 з.п. ф-лы, 4 ил.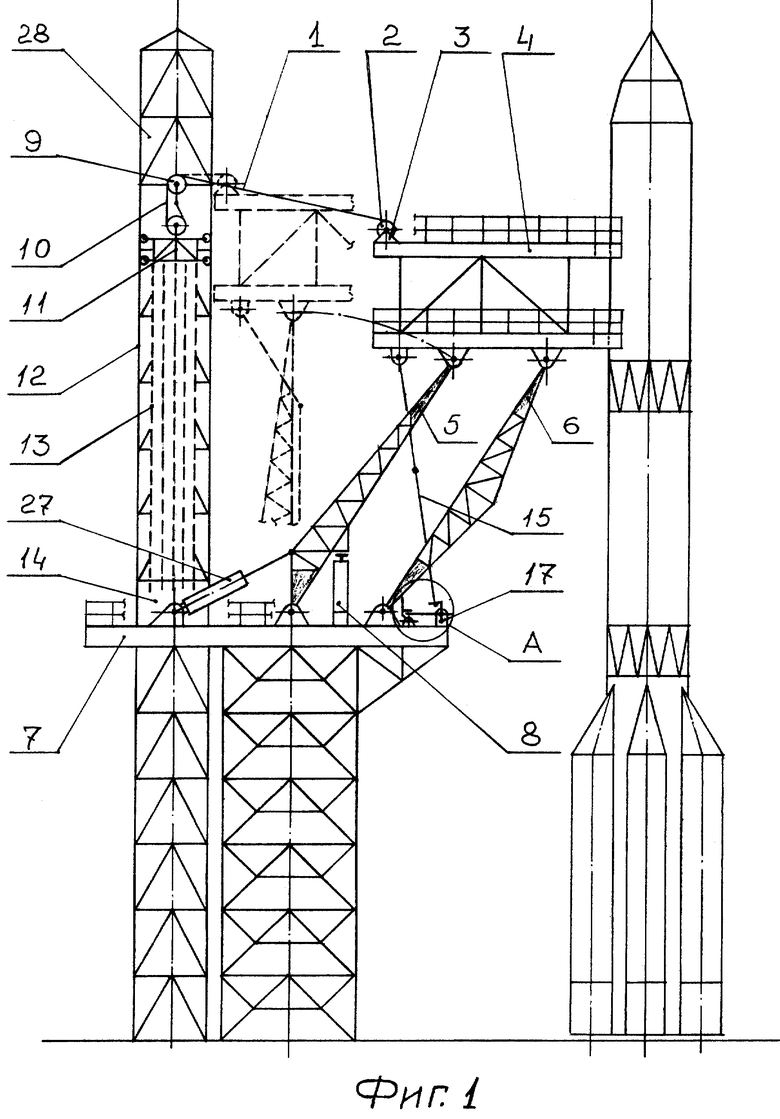
| ТОКОПОДВОД К САМОХОДНОМУ МЕХАНИЗМУ С ОГРАНИЧЕННОЙ ДЛИНОЙ ПЕРЕДВИЖЕНИЯ | 1996 |
|
RU2098341C1 |
| Балансировочное устройство стрелы самоходного крана для съемки движущейся камерой | 1975 |
|
SU700432A1 |
| US 4727959 A, 01.03.1988 | |||
| УСТРОЙСТВО ДЛЯ МОНТАЖА ОБОРУДОВАНИЯ НА ПЕРЕКРЫТИЯХ ЗДАНИЯ | 1990 |
|
RU2025463C1 |
| ТЕХНИЧЕСКАЯ 'О БЯЕЛЙОТЕКА | 0 |
|
SU247800A1 |
| Цепной противовес | 1934 |
|
SU42273A1 |

