Изобретение относится к грузоподъемным стреловым кранам, устанавливаемым на рельсовых транспортным средствах, в частности к железнодорожным кранам, предназначенным для погрузочно-разгрузочных и восстановительных работ.
Известен железнодорожный кран ЕДК-2000 (Восстановительные работы на железных дорогах /Н.В. Васильев, Р.А. Радионов, О.И. Комаров и др. Под ред. В. М. Шитова, Н.А. Шелудько. - М: Транспорт. 1993 г., с.30-33). Известный железнодорожный кран содержит платформу на двух четырехосных ходовых тележках, в центральной части которой смонтировано опорно-поворотное устройство, на котором закреплена поворотная часть с грузоподъемной стрелой. Платформа снабжена выносными поворачивающимися опорами с домкратами. Выносные поворачивающиеся опоры имеют гидравлический привод и смонтированы с возможностью их расстановки на различных углах поворота. В транспортировочном положении крана грузоподъемная стрела одним концом опирается на упор, который размещен на специальной противовесной самоходной платформе, а другой ее конец находится на поворотной части крана. На противовесной самоходной платформе расположены дизель-генераторная установка с механизмом передвижения и два противовеса, которые навешиваются специальным приспособлением на заднюю поворотную часть крана. Управление железнодорожным краном осуществляется из кабины машиниста, которая находится на поворотной части. Управление выносными поворачивающимися опорами производится с пультов управления, размещенных на платформе крана.
Недостатком известного железнодорожного крана является то, что платформа крана не снабжена средствами для передвижения собственным ходом. А передвижение крана осуществляется посредством специальной противовесной самоходной платформы, что обуславливает сравнительно большие массогабаритные характеристики крана.
Также известен железнодорожный кран КДЭ-160 (Мужичков В.И., Редников В. А. Грузоподъемные краны на железнодорожном ходу: Учебник для техн. школ ж. -д. транспорта. - 4-е изд., перераб. и доп. -М.: Транспорт, 1978, с.б, 7, рис. 1, с. 245, рис. 102, с. 284, рис. 130). Известный железнодорожный кран содержит платформу на двух двуосных ходовых тележках, в центральной части которой смонтировано опорно-поворотное устройство, на которой закреплена поворотная часть с дизель-генераторной установкой и грузоподъемной стрелой. Платформа крана снабжена выносными поворачивающимися опорами в виде откидывающихся поворотных кронштейнов с винтовыми домкратами. На платформе расположен механизм передвижения собственным ходом, выполненный в виде двух одинаковых электромеханических приводов с передачей крутящего момента на ось одной из колесных пар соответствующей ходовой тележки.
Недостатком известного железнодорожного крана является применение для механизма передвижения собственным ходом электродвигателей, что предъявляет повышенные требования к устройству, обеспечивающему электрическое соединение поворотной части крана с платформой последнего. Кроме того, в известном кране выносные поворачивающиеся опоры устанавливаются вручную, что увеличивает время развертывания крана на месте проведения работ и повышает трудоемкость обслуживания.
Наиболее близким по совокупности существенных признаков с заявленным изобретением является железнодорожный кран, представленный в описании изобретения по патенту РФ N 2108933 (МПК6 В 61 D 5/02, 1996 г.). Известный железнодорожный кран содержит платформу на ходовых тележках, механизм передвижения собственным ходом, выполненный в виде двух электромеханических приводов с передачей крутящего момента на ось одной из колесных пар соответствующей ходовой тележки, гидрооборудование, размещенное на платформе. Платформа крана снабжена выносными поворачивающимися опорами с домкратами, а гидрооборудование крана включает гидравлический привод выносных опор. Работа железнодорожного крана заключается в выполнении им следующих функций: движение в составе поезда; движение собственным ходом; работа с грузом с колес (без выносных опор); работа с грузом на выносных опорах. Передвижение крана собственным ходом осуществляется с помощью механизма передвижения, который размещается снизу рамы платформы, в центре упомянутой платформы между четырехосными тележками симметрично и выполнен в виде двух одинаковых приводов, состоящих из двух электродвигателей, двух тяговых редукторов, двух карданных валов и двух осевых редукторов, смонтированных на последней оси колесной пары, с внутренней стороны каждой четырехосной тележки. Каждая пара электродвигатель - тяговый редуктор смонтирована на отдельной раме, при этом каждая упомянутая рама с возможностью беспрепятственного демонтажа крепится к раме платформы с помощью болтов. Крутящий момент от электродвигателя посредством тягового редуктора и карданного вала передается на шестерню осевого редуктора, которая взаимодействует с зубчатым колесом, смонтированным на оси колесной пары с внутренней стороны каждой тележки. При движении крана в составе поезда тяговый редуктор отключается при помощи рычагов с рукоятками, выведенных на обе стороны рамы платформы. Таким образом, крутящий момент от колесной пары на электродвигатель при таком движении не передается. Питание электродвигателей механизма передвижения собственным ходом осуществляется от дизель-генератора, установленного на вращающейся части крана, или от внешнего источника электроэнергии, если таковой имеется на месте проведения работ, посредством кабеля, входящего в комплект оборудования железнодорожного крана.
Недостатком известного железнодорожного крана является то, что в нем недостаточно эффективно используется мощность имеющегося гидрооборудования, поскольку большую часть времени насос гидравлического привода выносных поворачивающихся опор остается незадействованным. Кроме того, применение для механизма передвижения собственным ходом электропривода предъявляет повышенные требования к вращающемуся контактному токосъемному устройству, обеспечивающему электрическое соединение вращающейся части крана с платформой последнего. Вместе с этим сами электродвигатели являются достаточно громоздкими и тяжелыми, в результате чего увеличивается вес платформы и, следовательно, крана в целом.
Задачей, решаемой изобретением, является повышение эффективности использования мощности гидрооборудования железнодорожного крана, имеющего механизм передвижения собственным ходом.
Указанная задача решается благодаря тому, что в железнодорожном кране, содержащем платформу на ходовых тележках, механизм передвижения собственным ходом, выполненный в виде двух одинаковых приводов с передачей крутящего момента на ось одной из колесных пар соответствующей ходовой тележки, гидрооборудование, размещенное на платформе, причем платформа снабжена выносными поворачивающимися опорами с домкратами, а гидрооборудование крана включает гидравлический привод выносных поворачивающихся опор, согласно изобретению каждый привод механизма передвижения собственным ходом включает гидравлический привод, содержащий аксиально-поршневой реверсивный регулируемый гидромотор. Упомянутые гидравлические приводы посредством магистралей сообщены с баком и через трехпозиционный распределитель с электромагнитным управлением посредством других магистралей сообщены с общим источником питания. Трехпозиционный распределитель выполнен с возможностью разгрузки общего источника питания в одной его позиции. Магистрали, связывающие трехпозиционный распределитель соответственно с общим источником питания и гидравлическим приводом выносных поворачивающихся опор, через соответствующие предохранительные клапаны сообщены с баком.
Вместе с этим каждый аксиально-поршневой реверсивный регулируемый гидромотор гидравлического привода механизма передвижения собственным ходом выполнен с возможностью гидравлического торможения посредством блока клапанов, включающего два предохранительных клапана, которые параллельно и разнонаправленно установлены между магистралями, связывающими аксиально-поршневой реверсивный регулируемый гидромотор с упомянутым трехпозиционным распределителем. Каждая из этих магистралей через соответствующий обратный клапан дополнительно сообщена с баком.
Технический результат использования изобретения состоит в том, что оно позволяет повысить эффективность использования мощности имеющегося гидрооборудования крана, благодаря конструктивному совмещению гидравлического привода выносных поворачивающихся опор с приводом механизма передвижения собственным ходом, а также благодаря конструктивным особенностям выполнения гидравлического привода механизма передвижения собственным ходом, которые позволяют минимизировать мощность привода, потребную для передвижения крана собственным ходом. При этом благодаря выполнению исполнительного привода механизма передвижения собственным ходом гидравлическим изобретение в сравнении с известным устройством позволяет снизить требования к вращающемуся контактному токосъемному устройству, обеспечивающему электрическое соединение вращающейся части крана с платформой последнего, а также уменьшить вес платформы крана и, следовательно, крана в целом. Вместе с этим изобретение обеспечивает возможность преобразования железнодорожного крана с электромеханическим приводом передвижения собственным ходом в кран с гидромеханическим приводом передвижения.
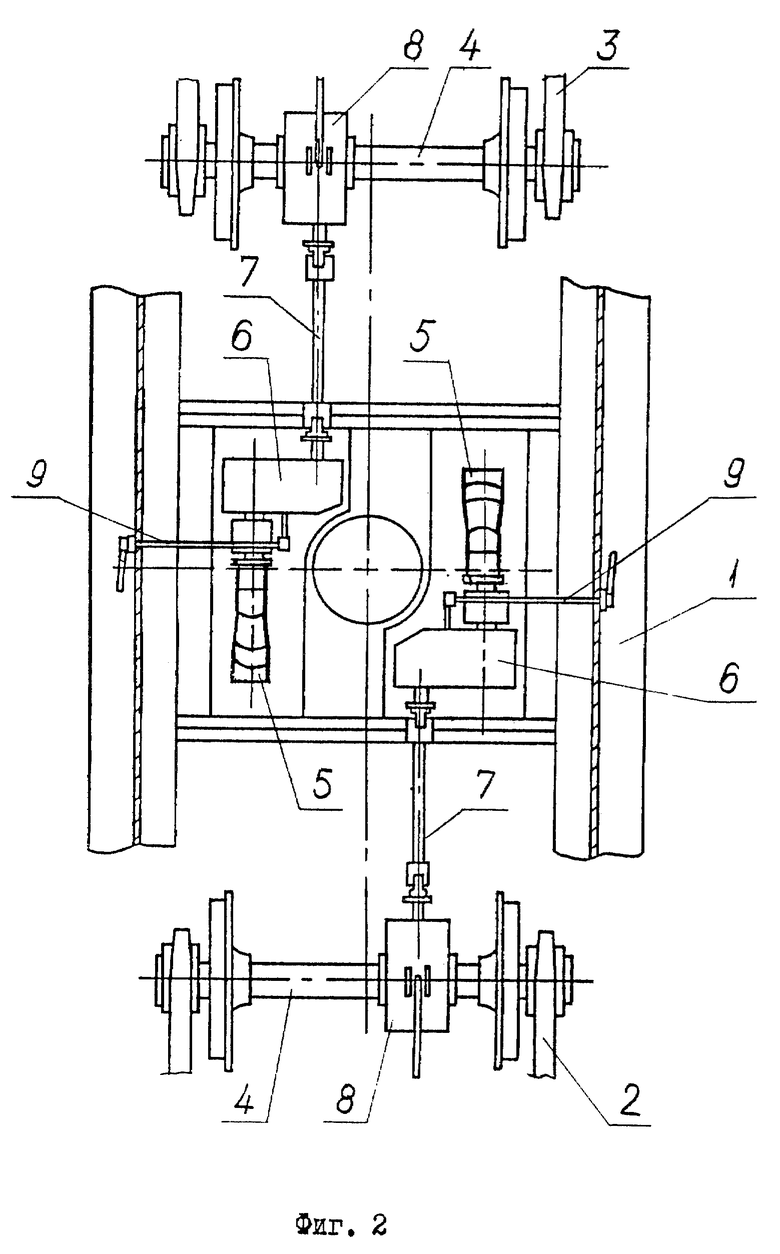
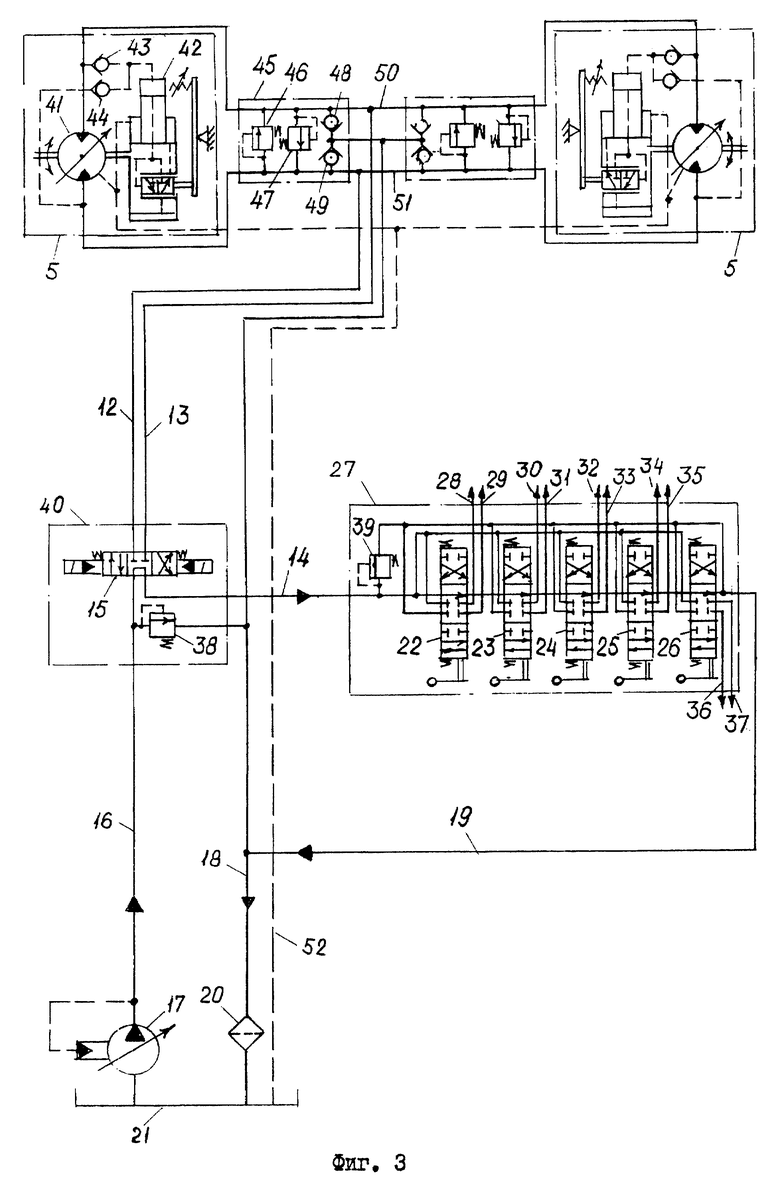
Устройство железнодорожного крана схематично представлено на чертежах, где на фиг. 1 показан железнодорожный кран в транспортировочном положении, общий вид; на фиг. 2 - механизм передвижения собственным ходом, разрез А-А на фиг. 1 (повернуто); на фиг. 3 - принципиальная схема гидравлических приводов механизма передвижения собственным ходом и гидравлического привода выносных поворачивающихся опор (последний показан не полностью).
Железнодорожный кран содержит платформу 1, соединенную с ходовыми тележками 2 и 3, механизм передвижения собственным ходом. В варианте осуществления изобретения ходовые тележки выполнены четырехосными. Механизм передвижения собственным ходом выполнен в виде двух одинаковых гидромеханических приводов с передачей крутящего момента на ось одной из колесных пар 4 соответствующей ходовой тележки. При этом каждый привод механизма передвижения собственным ходом включает гидравлический привод, содержащий аксиально-поршневой реверсивный регулируемый гидромотор 5, тяговый редуктор 6, карданный вал 7 и осевой редуктор 8, смонтированный на оси соответствующей колесной пары 4 с внутренней стороны ходовой тележки. Крутящий момент от гидромотора 5 посредством тягового редуктора 6 и карданного вала 7 передается на шестерню осевого редуктора 8, которая взаимодействует с зубчатым колесом, смонтированным на оси колесной пары 4. При движении крана в составе поезда тяговые редукторы 6 отключаются при помощи рычагов с рукоятками 9, соответственно выведенными на обе стороны платформы 1. Благодаря этому исключается возможность передачи крутящего момента от колесной пары 4 на гидромотор 5 при движении крана в составе поезда. Платформа 1 снабжена выносными поворачивающимися опорами 10 с домкратами 11. На платформе размещено гидрооборудование крана, которое включает гидравлический привод выносных поворачивающихся опор, содержащий гидроцилиндры домкратов 11 выносных поворачивающихся опор 10 и гидроцилиндры поворота последних (упомянутые гидроцилиндры на чертеже не показаны). Гидравлические приводы механизма передвижения собственным ходом и гидравлический привод выносных поворачивающихся опор соответственно посредством магистралей 12, 13 и 14 через трехпозиционный распределитель с электромагнитным управлением 15 и напорную магистраль 16 сообщены с общим источником питания 17 и посредством магистралей 18 и 19 через фильтр 20 сообщены с баком 21. При этом гидроцилиндры домкратов 11 выносных поворачивающихся опор 10 и гидроцилиндры поворота последних соединены с трехпозиционным распределителем 15 через трехпозиционные распределители с ручным управлением 22-26, являющиеся элементами распределительного блока 27. Магистрали 28-35 соединяют трехпозиционные распределители с ручным управлением 22-25 с соответствующими гидроцилиндрами домкратов 11 выносных поворачивающихся опор 10. Магистрали 36 и 37 предназначены для подачи жидкости от трехпозиционного распределителя 26 к четырем гидрораспределителям с ручным управлением (на чертеже не показаны), каждый из которых управляет гидроцилиндром поворота соответствующей выносной поворачивающейся опоры 10. Трехпозиционный распределитель 15 выполнен с возможностью разгрузки общего источника питания 17 в одной его позиции. Магистрали 16 и 14, связывающие трехпозиционный распределитель 15 соответственно с источником питания 17 и гидравлическим приводом выносных поворачивающихся опор 10, соответственно через предохранительные клапаны 38 и 39 сообщены с баком 21. В варианте выполнения предохранительный клапан 39 является элементом распределительного блока 27, а предохранительный клапан 38 и трехпозиционный распределитель 15 являются элементами распределительного блока 40. Предохранительный клапан 39 предназначен для ограничения максимального давления жидкости при работе гидравлического привода выносных поворачивающихся опор и настроен на давление, например, 16 МПа. Предохранительный клапан 38 настроен на давление, например, 25 МПа.
В варианте осуществления изобретения источник питания 17 представляет собой аксиально-поршневой регулируемый насос с регулятором мощности, например, типа HK20-IV-72.5 ТУ 463-9182-81 (изготовитель - АО "Пролетарский завод", Санкт-Петербург). В качестве трехпозиционного распределителя 15 может быть использован, например, трехпозиционный распределитель типа 1Р203-АЛЗ-64Г24НХЛ1 ТУ2.053.1846-87 (изготовитель - Ульяновский завод гидроаппаратуры). В качестве предохранительного клапана 38 может быть использован, например, предохранительный клапан типа 510.20.10А ХЛ (изготовитель - ОАО "Машиностроение и гидравлика", Москва). В качестве распределительного блока 27 может быть использован, например, пятисекционный распределитель типа 67010-20.1-5х02-30-ХЛ ТУ 4144-001-05785886-93 (изготовитель - упомянутое ОАО "Машиностроение и гидравлика").
Аксиально-поршневой реверсивный регулируемый гидромотор 5 включает собственно регулируемый гидромотор 41 и регулятор давления с видом регулирования по гиперболе, содержащий гидроцилиндр 42 с обратными клапанами 43 и 44. В качестве гидромотора 5 может быть использован, например, гидромотор типа 303.3.56.140 ХЛ1 ТУ 22-1-020-100-95 (изготовитель - АО "Пневмостройшина", Екатеринбург). Каждый гидромотор выполнен с возможностью гидравлического торможения посредством соответствующего блока клапанов 45, включающего предохранительные клапаны 46 и 47 и обратные клапаны 48 и 49. Предохранительные клапаны 46 и 47 параллельно и разнонаправленно установлены между магистралями 50 и 51, связывающими посредством магистралей 12 и 13 гидромотор 5 с трехпозиционным распределителем 15, сообщенным с источником питания 17 и баком 21. Кроме того, магистрали 50 и 51 через обратные клапаны 48 и 49 дополнительно сообщены с баком 21 через магистраль 18. В варианте осуществления изобретения предохранительные клапаны 46 и 47 настроены на давление, например, 28 МПа. Гидравлический привод механизма передвижения собственным ходом также включает дренажную магистраль 52, посредством которой гидромоторы 5 сообщены с баком 21.
Железнодорожный кран работает следующим образом.
Работа крана заключается в выполнении им следующих функций:
движение в составе поезда;
движение собственным ходом (самоходом);
работа с грузом с колес (без установки выносных поворачивающихся опор);
работа с грузом на выносных поворачивающихся опорах.
При движении крана в составе грузового поезда он представляет собой самостоятельную железнодорожную единицу, соединенную с соседними вагонами или локомотивом с помощью автосцепных устройств. На месте проведения погрузочно-разгрузочных и восстановительных работ железнодорожный кран может двигаться собственным ходом. При работе крана с опорой на выносные поворачивающиеся опоры 10 последние посредством гидроцилиндров поворота устанавливаются перпендикулярно продольной оси платформы 1 или под углом к ней в зависимости от массы груза. Затем путем выдвижения штоков домкратов 11 осуществляют вывешивание и горизонтирование крана.
В транспортировочном положении крана выносные поворачивающиеся опоры 10 расположены вдоль платформы 1 и зафиксированы. Трехпозиционный распределитель с электромагнитным управлением 15 и трехпозиционные распределители с ручным управлением 22-26 установлены в нейтральном положении. При включении аксиально-поршневого регулируемого насоса (источника питания) 17 жидкость от насоса через напорную магистраль 16, трехпозиционный распределитель 15, магистраль 14, трехпозиционные распределители 22-26, магистрали 19 и 18 и фильтр 20 поступает в бак 21. Таким образом, при нахождении упомянутых трехпозиционных распределителей в нейтральном положении обеспечивается разгрузка источника питания.
Для передвижения крана собственным ходом машинист крана отклоняет от нейтрального положения тумблер, расположенный в кабине машиниста, в положение, соответствующее направлению движения, например, вперед. Отклонение тумблера от нейтрального положения приводит к подаче управляющего сигнала на соответствующий электромагнит трехпозиционного распределителя 15, например левый (по чертежу). В результате золотник трехпозиционного распределителя смещается вправо, и жидкость от насоса (источника питания) 17 поступает по магистрали 16 через трехпозиционный распределитель 15, магистрали 12 и 51 к аксиально-поршневым реверсивным регулируемым гидромоторам 5. Здесь жидкость поступает в регулируемые гидромоторы 41 и одновременно через обратные клапаны 44 в гидроцилиндры 42 регуляторов давления гидромоторов. Гидромоторы под давлением жидкости начинают вращаться, передавая движение через тяговые редукторы 6, карданные валы 7 и осевые редукторы 8 на оси соответствующих колесных пар 4, и кран начинает движение вперед.
Жидкость из гидромоторов вытесняется по магистралям 50 и 13, через трехпозиционный распределитель 15 по магистрали 14, через трехпозиционные распределители 22-26, находящиеся в нейтральном положении, и далее по магистралям 19 и 18 в бак 21. При поступлении жидкости в гидроцилиндры 42 последние поворачивают блоки цилиндров гидромоторов (на чертеже не показаны) на соответствующий угол, и в зависимости от давления в гидросистеме устанавливается определенный рабочий объем (q) гидромоторов, который в варианте осуществления изобретения может изменяться, например, от 16 до 56 см3. В зависимости от величины давления в гидросистеме и от величины рабочего объема гидромотора последний будет развивать соответствующий крутящий момент на своем валу и, следовательно, тяговое усилие привода передвижения собственным ходом. Причем, чем больше давление в гидросистеме, тем больше рабочий объем гидромотора и тем больше крутящий момент на валу и тяговое усилие привода. Таким образом, максимальный крутящий момент будет при страгивании крана, когда в гидросистеме насос 17 создает максимальное давление. Вместе с тем в варианте выполнения насос 17 представляет собой аксиально-поршневой регулируемый насос с регулятором мощности, т.е. он работает по закону P•Q = const, где P - давление в гидросистеме, Q - подача насоса. Это означает, что при минимальном давлении Pmin насос обеспечивает максимальную подачу Qmax следовательно, в момент страгивания, когда в гидросистеме давление будет максимальным Pmax подача насоса будет минимальной Qmin. Поскольку подача насоса будет минимальной, а рабочий объем гидромотора будет максимальным, то частота вращения (n) вала гидромотора в момент страгивания будет минимальной, т.е.

Таким образом, скорость передвижения при страгивании крана будет минимальной, но при страгивании большая скорость и не требуется, зато крутящий момент (Мкр) на валу гидромотора будет максимальным и, следовательно, тяговое усилие привода также будет максимальным
Mкр = qminPmin
С другой стороны, после страгивания крана, когда сопротивление движению будет уменьшаться, в гидросистеме давление будет уменьшаться пропорционально уменьшению силы сопротивления движению. Насос 17 увеличит подачу пропорционально уменьшению давления, что следует из закона, по которому работает насос. Когда сопротивление движению уменьшится до минимального, подача насоса увеличится до максимальной.
Одновременно с уменьшением давления (Р) в гидросистеме до минимального рабочий объем (q) гидромотора также уменьшится до минимального, при этом частота вращения (n) вала гидромотора будет максимальной
В результате скорость передвижения крана увеличится до максимальной.
Таким образом, регулирование рабочего объема гидромотора и подачи насоса в зависимости от давления в гидросистеме позволяет минимизировать мощность привода, потребную для передвижения крана собственным ходом в конкретных условиях эксплуатации, и тем самым позволяет оптимально использовать мощность привода передвижения, что невозможно достигнуть в случае использования для привода передвижения крана собственным ходом электродвигателя.
Гидравлическое торможение крана осуществляется следующим образом.
Тумблер в кабине машиниста устанавливается в нейтральное положение. В результате соответственно включаются электромагниты трехпозиционного распределителя 15, и золотник последнего устанавливается в позицию, при которой отсекается подача жидкости от насоса 17 к гидромоторам 5. Насос переходит на работу в режиме разгрузки. При этом жидкость от насоса 17 поступает по магистрали 16 через трехпозиционный распределитель 15, по магистрали 14 через трехпозиционные распределители 22-26, находящиеся в нейтральном положении, и далее по магистралям 19 и 18 в бак 21. Кран продолжает движение по инерции. При этом в зависимости от направления движения крана жидкость в гидромоторах 5 будет соответственно перетекать из одной рабочей полости гидромотора в другую через соответствующий предохранительный клапан 46 или 47. В рассматриваемом примере при движении крана по инерции вперед жидкость перетекает через предохранительные клапаны 47. Предохранительные клапаны 46 и 47 настроены на повышенное давление, например, 28 МПа. Таким образом осуществляется гидравлическое торможение крана. Часть жидкости из гидромоторов 5 будет поступать в дренажную магистраль 52 за счет внутренних перетечек гидромоторов. Для обеспечения баланса жидкости в полостях гидромоторов предусмотрены обратные клапаны 48 и 49. В режиме гидравлического торможения при движении крана по инерции вперед жидкость к гидромоторам поступает через обратные клапаны 49, а при движении по инерции в другом направлении - через обратные клапаны 48. При этом жидкость поступает из сливной магистрали 18, в которой при работе насоса 17 в режиме разгрузки существует некоторое избыточное давление.
Для передвижения крана собственным ходом в обратном направлении тумблер в кабине машиниста переключается в положение, соответствующее направлению движения, например, назад. При этом включается правый (по чертежу) электромагнит трехпозиционного распределителя 15. В результате золотник упомянутого трехпозиционного распределителя смещается влево, и жидкость от насоса 17 поступает по магистрали 16 через трехпозиционный распределитель 15, магистрали 13 и 52 к аксиально-поршневым регулируемым гидромоторам 5. Гидромоторы под давлением жидкости начинают вращаться в другом направлении, передавая движение через тяговые редукторы 6, карданные валы 7 и осевые редукторы 8 на оси соответствующих колесных пар 4, и кран начинает движение назад. Одновременно жидкость через обратные клапаны 43 поступает в гидроцилиндры 42 регуляторов давления гидромоторов. Жидкость из гидромоторов будет вытесняться по магистралям 51 и 12 через трехпозиционный распределитель 15, по магистрали 14 через трехпозиционные распределители 22-26, находящиеся в нейтральном положении, и далее по магистралям 19 и 18 в бак 21. Регулирование рабочего объема гидромотора и подачи насоса в зависимости от давления в гидросистеме производится аналогично тому, как и при движении крана в направлении вперед.
Таким образом, благодаря особенности исполнения железнодорожного крана изобретение позволяет повысить эффективность использования мощности гидрооборудования крана путем конструктивного совмещения гидравлического привода выносных поворачивающихся опор с приводом механизма передвижения собственным ходом, позволяет снизить требования к вращающемуся контактному токосъемному устройству, обеспечивающему электрическое соединение вращающейся части крана с платформой последнего, а также позволяет уменьшить вес платформы и, следовательно, крана в целом. Вместе с этим изобретение обеспечивает возможность преобразования железнодорожного крана с электромеханическим приводом передвижения собственным ходом в кран с гидравлическим приводом передвижения.
| название | год | авторы | номер документа |
|---|---|---|---|
| ГИДРАВЛИЧЕСКИЙ ПРИВОД СТРЕЛОВОГО САМОХОДНОГО КРАНА | 1999 |
|
RU2158220C1 |
| ЖЕЛЕЗНОДОРОЖНЫЙ КРАН, ПРЕИМУЩЕСТВЕННО ДЛЯ ВОССТАНОВИТЕЛЬНЫХ РАБОТ | 1998 |
|
RU2155155C1 |
| ГИДРАВЛИЧЕСКИЙ ПРИВОД СТРЕЛОВОГО САМОХОДНОГО КРАНА | 1997 |
|
RU2131394C1 |
| ГИДРАВЛИЧЕСКИЙ ПРИВОД СТРЕЛОВОГО САМОХОДНОГО КРАНА | 2002 |
|
RU2213042C1 |
| ГИДРАВЛИЧЕСКИЙ ПРИВОД ВЫВЕШИВАНИЯ И ГОРИЗОНТИРОВАНИЯ ГРУЗОВОЙ ПЛАТФОРМЫ | 1996 |
|
RU2128790C1 |
| ГИДРАВЛИЧЕСКИЙ ПРИВОД ВЫВЕШИВАНИЯ И ГОРИЗОНТИРОВАНИЯ ГРУЗОВОЙ ПЛАТФОРМЫ | 1996 |
|
RU2128789C1 |
| ГИДРАВЛИЧЕСКИЙ ПРИВОД УСТРОЙСТВА ДЛЯ ИСПЫТАНИЯ ЖЕЛЕЗНОДОРОЖНОГО ПУТИ | 2003 |
|
RU2243311C1 |
| ЖЕЛЕЗНОДОРОЖНАЯ ПЛАТФОРМА | 1996 |
|
RU2108933C1 |
| ГИДРАВЛИЧЕСКИЙ ПРИВОД ВЫВЕШИВАНИЯ И ГОРИЗОНТИРОВАНИЯ ГРУЗОВОЙ ПЛАТФОРМЫ | 1995 |
|
RU2103566C1 |
| ГИДРАВЛИЧЕСКИЙ ПРИВОД ВЫВЕШИВАНИЯ И ГОРИЗОНТИРОВАНИЯ ГРУЗОВОЙ ПЛАТФОРМЫ | 1996 |
|
RU2115030C1 |
Изобретение относится к грузоподъемным стреловым кранам, устанавливаемым на рельсовых транспортных средствах, в частности к железнодорожным кранам (ЖК), предназначенным для погрузочно-разгрузочных и восстановительных работ. ЖК содержит платформу на ходовых тележках, механизм передвижения собственным ходом, выполненный в виде двух одинаковых приводов с передачей крутящего момента на ось одной из колесных пар соответствующей ходовой тележки, и гидрооборудование, размещенное на платформе. Платформа снабжена выносными поворачивающимися опорами с домкратами. Гидрооборудование железнодорожного крана включает гидравлический привод (ГП) выносных поворачивающихся опор. Каждый привод механизма передвижения собственным ходом включает ГП, содержащий аксиально-поршневой реверсивный регулируемый гидромотор. ГП посредством магистралей сообщены с баком и через трехпозиционный распределитель с электромагнитным управлением посредством других магистралей сообщены с общим источником питания. Трехпозиционный распределитель выполнен с возможностью разгрузки общего источника питания в одной его позиции. Магистрали, связывающие трехпозиционный распределитель соответственно с общим источником питания и ГП выносных поворачивающихся опор, через соответственные предохранительные клапаны сообщены с баком. В варианте выполнения каждый гидромотор ГП механизма передвижения собственным ходом выполнен с возможностью гидравлического торможения посредством блока клапанов, включающего два предохранительных клапана, которые параллельно и разнонаправлено установлены между магистралями, связывающими гидромотор с упомянутым трехпозиционным распределителем, причем каждая из этих магистралей, через соответствующий обратный клапан, дополнительно сообщена с баком. Изобретение позволяет повысить эффективность использования мощности гидрооборудования ЖК, снизить требования к устройству, обеспечивающему электрическое соединение вращающейся части крана с платформой последнего, а также уменьшить вес ЖК. Вместе с этим изобретение обеспечивает возможность преобразования ЖК с электромеханическим приводом передвижения собственным ходом в ЖК с гидромеханическим приводом передвижения. 1 з.п. ф-лы, 3 ил.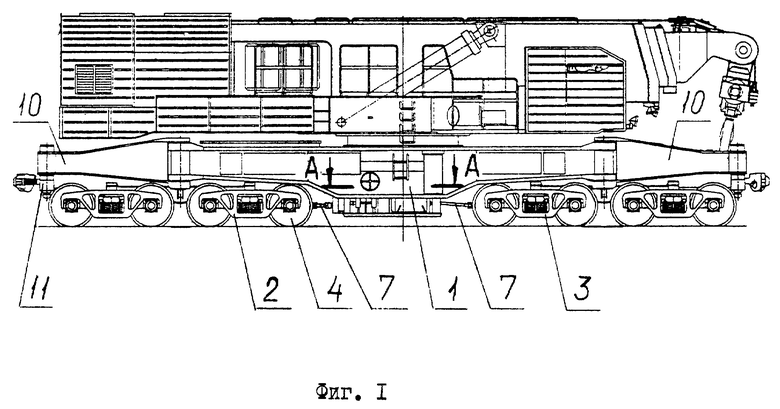
| ЖЕЛЕЗНОДОРОЖНАЯ ПЛАТФОРМА | 1996 |
|
RU2108933C1 |
| ГИДРАВЛИЧЕСКИЙ ПРИВОД СТРЕЛОВОГО САМОХОДНОГО КРАНА | 1997 |
|
RU2131394C1 |
| Гидравлический привод выносных опор стрелового самоходного крана | 1980 |
|
SU969649A1 |
| Гидравлический привод стрелового самоходного крана | 1973 |
|
SU449881A1 |
| ГИДРОПРИВОД СТРЕЛОВОГО САМОХОДНОГО КРАНА | 1993 |
|
RU2029726C1 |
| Гидравлический привод стрелового самоходного крана | 1979 |
|
SU861284A1 |

