(Л
С
| название | год | авторы | номер документа |
|---|---|---|---|
| Телевизионный координатор | 1983 |
|
SU1109956A1 |
| Устройство для измерения координатных искажений фокусирующе-отклоняющей системы и передающей электронно-лучевой трубки | 1989 |
|
SU1660212A1 |
| СПОСОБ СЛЕЖЕНИЯ ЗА ОБЪЕКТОМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1991 |
|
RU2153235C2 |
| ТЕЛЕВИЗИОННЫЙ КООРДИНАТНЫЙ ДИСКРИМИНАТОР | 1996 |
|
RU2143182C1 |
| ТЕЛЕВИЗИОННЫЙ КООРДИНАТНЫЙ ДИСКРИМИНАТОР | 1996 |
|
RU2139640C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ КООРДИНАТ ОБЪЕКТА | 1990 |
|
SU1823773A1 |
| Устройство для определения координат объекта | 1990 |
|
SU1814196A1 |
| Оптическое устройство для вычисления корреляционной функции | 1988 |
|
SU1520541A1 |
| Устройство для селекции изображений | 1991 |
|
SU1837335A1 |
| ТЕЛЕВИЗИОННОЕ УСТРОЙСТВО СЕЛЕКЦИИ ДВИЖУЩИХСЯ ОБЪЕКТОВ И ОПРЕДЕЛЕНИЯ ИХ КООРДИНАТ | 1984 |
|
SU1250151A1 |

Изобретение относится к телевидению. Цель изобретения - повышение точности путем определения точки максимальной корреляции и ее координат. Устройство содержит передающий блок 1, АЦП 2, монитор 3, генератор 4 импульсов синхронизации, переключатель 5 режимов, блок 6 управления, блок 7 памяти текущего кадра, блок 8 памяти эталонная о кздра блоки 9, 10 и 11 рециркуляции данных, цифровой коррелятор 12, ЦАП 13, счетчики 14, 15 и 22, компаратор 16, триггеры 17 и 26, элементы И 18, 19, 21 и 24, элемент ИЛИ 20, элементы НЕ 23 и 25 Телевизионное следящее устройство, выполненное данным образом, обеспечивает повышение точности системы слежения за счет уточненного определения точки максимальной корреляции и ее координат при организации управления сдвигом информации в регистре блока 8 памяти эталонного кацра таким образом, что в любом телевизионном кадре информация из блока 8 сравнивается с информацией от одних и тех же 64-х (из 81 возможного) участков блока 7 памяти текущего кадра. 3 ил.
о ю о
КЗ
Изобретение относигся к прикладному телевидению, в частности к телевизионным системам слежения за движущимися объектами.,
Целью изобретения является повышение точности путем обеспечения определения точки максимальной корреляции и ее координат.
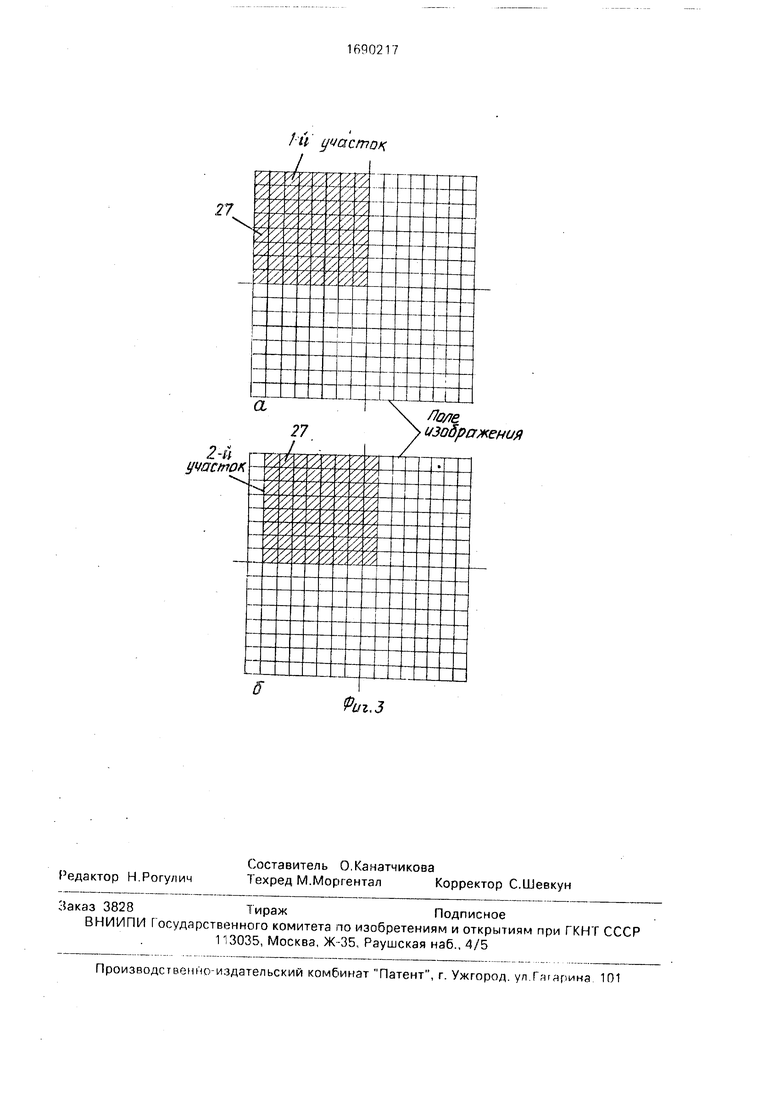
На фиг. 1 представлена структурная схема телевизионного следящего устройства; на фиг. 2 - временные диаграммы, поясняющие процесс формирования сигналов управления сдвигом информации в блоке памяти эталонного кадра при коррелировании информации от 1-го до 2-го участков поля изображения; на фиг. 3 - местоположение в поле изображения 1-го и 2-го из коррелирующих участков.
Телевизионное следящее устройство содержит передающий блок 1, аналого-цифровой преобразователь (АЦП) 2, монитор 3, генератор 4 импульсов синхронизации, переключатель 5 режимов, блок б управления, блок 7 памяти текуш;его кадра, блок 8 памяти эталонного кадра, три блоки 9-11 рециркуляции данных, цифровой коррелятор 12, цифроаналоговый преобразователь (ЦАП) 13, счетчики 14 и 15, компаратор 16, первый триггер 17, первый 18 и второй 19 элементы И; элемент ИЛИ 20, третий элемент И 21. третий счетчик 22, первый элемент НЕ 23, четвертый элемент И 24, второй элемент НЕ 25 и второй триггер 26.
Телевизионное следящее устройство с использованием пространственной корреляции работает в режиме автосопровождения объекта в любом заданном участке поля зрения телекамеры следующим образом.
Изображение выбранного в поле зрения телекамеры участка отображается на экране монитора 3 в строб-окне 27 (фиг. 3). Положение строб-окна 27 на экране монитора 3 вначале задается органами управления передающего (камерного) блока 1 (переключателем 5 режимов), а затем отслеживается автоматически при взятии системой на автосопровождение объекта, находящегося в строб-окне 27,
Автосопровождение строб-окна 27 осуществляется при помощи блоков 7 и 8 памяти цифрового коррелятора 12. . Использование двух блоков памяти позволяет представить видеоинформацию так, чтобы обрабатывать ее я интервале между двумя телевизионными кадрами,
Блок 8 памяти эталонного кадра выполнен на 64-разрядном сдвиговом регистре в виде матрицы 8x8 элементов разложения и позволяет записать информацию с 8-ми
строк с 8-микросекундными отсчетами по строке.
Блок 7 памяти текущего кадра выполнен на 256-разрядном сдвиговом регистре в виде матрицы 16x16 элементов разложения и позволяет записать информацию с 16-ти строк с 16-ю 1-микросекундными отсчетами по строке. Информация о начальном положении объекта (центральная зона строб-окна 27) записывается в блок 8 памяти эталонного кадра, а информация о текущем положении объекта в пределах строб-окна 27 - в блоке 7 памяти текущего кадра.
Начальная информация о положении
объекта служит эталоном для сравнения ее с информацией последующих телевизионных кадров в пределах строб-окна 27, чтобы определить положение объекта в каждом кадре.
Видеоинформация записывается в блоки 7 и 8 памяти в виде бинарно-квантованного сигнала. Записанную в блоки 7 и 8 памяти видеоинформацию можно сравнивать и обрабатывать в любой нужной последовательности. Сравнение содержимого двух блоков 7 и 8 памяти позволяет определить точку максимальной корреляции и ее координаты в пределах строб-окна 27.
Запись информации в блок 7 памяти текущего кадра производится в каждом телевизионном кадре, а запись информации в блок 8 памяти эталонного кадра осуществляется при нажатии на переключатель
5 режимов для взятия объекта на автосопровождение.
Все узлы телевизионного следящего устройства работают от одного генератора 4 импульсов синхронизации с тактовой частотой не менее 1 МГц.
Видеосигнал с передающего (камерного) блока 1 поступает на вход монитора 3 и АЦП 2. В схеме АЦП 2 для заданного числа строк формируется определенное число
следующих один за другим отсчетов одной строки видеосигнала. Количество строк и отсчетов для АЦП 2 устанавливается блоком 6 управления, содержащим в своем составе счетчики строк и отсчетов,
каждый из которых может считать до 167- ти. В АЦП 2 видеосигнал преобразуется в бинарно-квантованный дискретный сигнал. Система работает в двух режимах; в режиме записи видеоинформации в блоки 7 и
8 памяти и в режиме рециркуляции и срав нения.
Процесс записи информации в блоки 7 и 8 памяти осуществляется обычным образом. По окончании режима записи информации в блоки 7 и 8 памяти устройство
автоматически переходит в режим рециркуляции и сравнения.
В режиме рециркуляции и сравнения данные в блоке 7 памяти текущего кадра рециркулируются непрерывно, а данные в блоке 8 памяти эталонного кадра - под управлением сигналов, формируемых двумя -счетчиками 14 и 15 и компаратором 16.
Двоичный восьмиразрядный первый счетчик 14 считает до 256, а двоичный шестиразрядный второй счетчик 15-до 64. Синхронизация первого счетчика 14 по тактовой частоте осуществляется тем же сигналом, что и управление рециркуляцией данных в блоке 7 памяти текущего кадра, поэтому эти два блока работают синфазно. Второй счетчик 15 синхронизируется импульсом, поступающим один раз за весь цикл работы второго счетчика 14.
В циклах сравнения эталон последовательно перемещается по полю изображения и сравнивается с различными участками в поле изображения.
Емкость блока 7 памяти текущего кадра позволяет выполнить сравнительную корреляцию каждого из 64-х битов информации блока 8 памяти эталонного кадра с информацией от 64-х участков в 256-разрядном регистре сдвига блока 7 памяти текущего кадра. Чтобы представить результат сравнения в двух координатах, нужно для корреляции первых 64-х битов взять матрицу 8 х 8 битов блока 8 памяти эталонного кадра в верхнем левом углу матрицы 16 х 16 блока 7 памяти текущего кадра. Для следующего сравнения матрица блока 8 памяти эталонного кадра сдвигается на 1 отсчет вправо и так далее на 8 позиций правее, а затем аналогичным образом по нижней строке. Такая пошаговая операция проводится для восьми последовательных строк, чтобы скорре- лировать каждый из 64-х битов в 64-х положениях.
Сравнение начинается с 1-го участка поля изображения, расположенного в верхнем левом углу поля изображения, как показано на фиг. За. В начальный момент цикла сравнения первый 14, второй 15 и третий 22 сметчики и триггеры 17 и 26 установлены в исходное состояние. Информация с первых трех разрядов второго счетчика 15 сравнивается на компараторе 16 с информацией первых трех разрядов первого счетчика 14. В начале цикла сравнения на выходах двух счетчиков 14 и 15 - коды 000. Тактовые импульсы (фиг. 2а) поступают на счетный вход первого счетчика 14. При поступлении на вход первого счетчика 14 первого тактового импульса на выходе компаратора формируется импульс (фиг. 26), который запускает
двоичный пятиразрядный третий счетчик 22 (фиг. 2в,г,д,ж,з) и одновременно вызывает срабатывание первого триггера 17 (фиг. к), устанавливая на выходе его уровень логической 1. Первый триггер 17 работает в счетном режиме. Сигнал с его выхода открывает элемент ИЛИ 20 и затем через третий элемент И 21 на вход управления блоком 8 памяти эталонного кадра с генератора 4 им0 пульсов синхронизации проходят тактовые импульсы, обеспечивающие сдвиг информации в регистрах блока 8 памяти эталонного кадра. Через 8 тактовых импульсов при совпадении кодов первого 14 и второго 15 счет5 чиков на выходе компаратора 16 появляется второй импульс, который . устанавливает на выходе первого триггера 17 уровень логического О, запрещающего прохождение в блок 8 памяти эталонного кадра тактовых
0 импульсов, а Следовательно, и сдвиг информации в нем. Информация в блоке 7 памяти текущего кадра в это время сдвигается.
После формирования на выходе первого триггера 17 последовательности из восьми
5 импульсов, во время действия которых разрешается сдвиг информации в регистрах блока 8 эталонного кадра (фиг. 2к), в цифро; вом корреляторе 12 произведено сравнение данных эталона с данными 1-го участка поля
0 изображения, инвертированный сигнал пятого разряда третьего счетчика 22 (фиг. 2и) через четвертый элемент И 24 заблокирует первый триггер 17 по его входу установки в исходное состояние. При этом на выходе
5 первого триггера 17 устанавливается уровень логического О (фиг. 2к). Информация в блоке 7 памяти текущего кадра в это время сдвигается. Через 256 тактовых импульсов, поступивших на вход первого счетчика 14,
0 на его выходе формируется импульс сдвига содержимого второго счетчика 15 на один разряд, а на выходе пятого разряда третьего счетчика 22 появляется сигнал, разрешающий работу первого триггера 17. Схемыпод5 готовлены для проведения операций сравнения данных эталона с данными второго участка (фиг. 36).
Уровень логической 1 на выходе первого триггера 17 вновь установится по сиг0 налу с компаратора 16.
Во втором цикле сравнения сигналы на выходе компаратора 16 появляются, когда на выходе первого счетчика 14 устанавливается код 001 (во втором счетчике 15 он уже
5 установлен). При этом снова формируются сигналы управления сдвигом, информации в блоке 7 памяти текущего кадра, как было рассмотрено выше.
Циклы сравнения повторяются до тех пор, пока не будет последовательно завершено сравнение 64- участков поля изображения. Число проведенных циклов сравнения фиксируется вторым счетчиком 15. По окончании 64-го цикла сравнения выходной сигнал с 6 разряда второго счетчика 15 вы- зывает срабатывание второго триггера 26. Сигнал с инвертирующего выхода второго триггера 26 через четвертый элемент И 24 блокирует первый триггер 17 по его входу установки в исходное состояние. При этом на выходе первого триггера устанавливается уровень логического О, запрещающий сдвиг информации в блоке 8 памяти эталонного кадра. Уровень логического О на выходе первого триггера 17 удерживает- ся до тех пор, пока систем не перейдет в следующем телевизионном кадре в режим записи информации.
В следующем телевизионном кадре сигнал, формирующий левый угол строб-окна 27, устанавливает второй триггер 26 в исходное состояние, при этом снимается блокировка с первого триггера 17.
Содержимое второго счетчика 15 однозначно определяет положение эталона в строб-окне 27,
Сравнение содержимого блока 8 памяти эталонного кадра с содержимым блока 7 памяти текущего кадра осуществляется при помощи цифрового чоррелятора 12. В ре- зупьтате работы цифрового коррелятора 12 определяется точка максимальной корреляции и ее координаты в строб-окне 27. Затем координаты точки максимальной корреляции, представленные соответствующими сигналами ошибки (рассогласования), используются для изменения положения телекамеры так, чтобы объект был размещен в центре строб-окна 27 и в центре монитора.
Телевизионное следящее устройство с использованием пространственной корреляции обеспечивает повышение точности системы слежения за счет уточненного определения точки максимальной корреляции и ее координат при организации управле- ния сдвигом информации в регистре блока 8 памяти эталонного кадра таким образом, что в любом телевизионном кадре информация из этого блока памяти сравнивается в корреляторе с информацией от од них и тех же 64-х (из 81 возможного) участков блока 7 памяти текущего кадра.
Формула изобретения
Телевизионное следящее устройство, содержащее передающий блок, первый вы- код которого соединен с. монитором и первым входом аналого-цифрового преобразователя (АЦП), второй выход передающего блока соединен с первым входом блока управления, второй вход которого соединен с выходом переключателя режимов, первый выход генератора импульсов синхронизации соединен с третьим входом блока управления, первым входом передающего блока и вторым входом АЦП. выход которого соединен с первыми входами первого и второго элементов И, причем выход первого элемента И соединен с информационным входом блока памяти текущего кадра, а выход второго элемента И соединен с информационным входом блока памяти эталонного кадра, первый выход блока управления соединен третьим входом АЦП, второй выход блока управления соединен с вторым входом первого элемента И, инвертирующими входами первого и второго блоков рециркуляции данных, третий выход блока управления соединен с вторым входом второго элемента И и инвертирующим входом третьего блока рециркуляции данных, выход блока памяти текущего кадра соединен с первым входом цифрового коррелятора и прямым входом первого блока рециркуляции данных, выход блока памяти эталонного кадра соединен с прямым входом третьего блока рециркуляции данных и через первый элемент НЕ -с вторым входом цифрового коррелятора, выход первого блока рециркуляции данных соединен с вторым входом блока памяти текущего кадра, выход третьего блока рециркуляции данных соединен с вторым входом блока памяти эталонного кадра, второй выход генератора импульсов синхронизации соединен с прямым входом второго блока рециркуляции данных, выход которого соединен со счетным входом первого счетчика, третий выход генератора импульсов синхронизации соединен с входами установки в 0й первого и второго счетчиков, выход цифрового коррелятора соединен через цифроаналогоеый преобразователь с вторым входом передающего блока, четвертый выход генератора импульсов синхронизации соединен с третьим входом цифрового коррелятора, первый выход первого счетчика соединен со счетным входом второго счетчика, второй, третий и четвертый входы первого счетчика соединены соответственно с первым, вторым и третьим входами кймпаратора, первый выход второго счетчика соединен с четвертым входом цифрового коррелятора, второй, третий и четвертый выходы второго счетчика соединены соответственно с четвертым, пятым и шестым входами компаратора, выход которого соединен со счетным входом первого триггера, выход которого соединен с первым входом элемента ИЛИ, второй вход которого соединен с четвертым выходом блока управления, выход элемента
ИЛИ соединен с первым входом третьего элемента И, второй вход которого соединен с вторым выходом генератора импульсов синхронизации, выход третьего элемента И соединен с третьим входом блока памяти эталонного кадра, а второй выход генератора импульсов синхронизации соединен с третьим входом блока памяти текущего кадра, отличающееся тем,что, с целью повышения точности путем определения точки максимальной корреляции и ее координат, введены третий счетчик, второй триггер, второй элемент НЕ, четвертый элемент И, причем вход третьего счетчика соединен с выходом компаратора, выход
0
5
третьего счетчика соединен через второй элемент НЕ с первым входом четвертого элемента И, второй вход которого соединен с третьим выходом генератора импульсов синхронизации, информационный вход второго триггера соединен с пятым выходом второго счетчика, вход установки в О второго триггера соединен с вторым выходом передающего блока, инвертирующий выход второго триггера подключен к третьему входу четвертого элемента И, выход которого соединен с входом установки в 0м первого триггера, а вход устанбвки в О третьего счетчика соединен с третьим выходом генератора импульсов синхронизации.
/и участок.
27
а
27
г
2-й участок
7,
5
Лоле изображения
Риг.З
| Патент США № 3828122, кл.Н 04 N7/18, G01 S5/16, 1972. |
