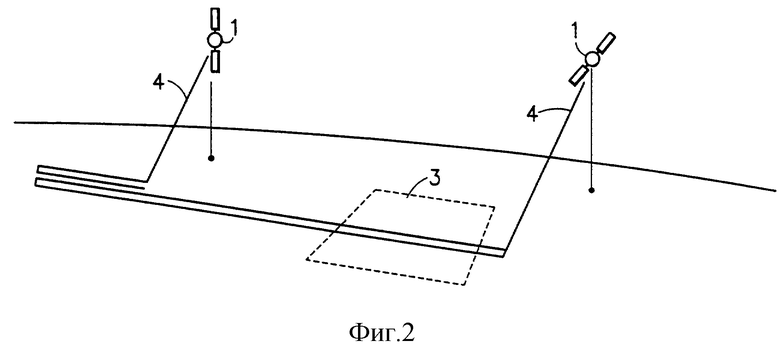
В системе формирования изображения с высоким разрешением с помощью орбитальных спутников качество изображения зависит от способности системы наводиться на цель и от стабильности спутниковой платформы в течение относительно непродолжительного процесса формирования изображения. Изображение состоит из полос, проходящих через цель, и должно быть составлено, как мозаика, программным обеспечением обработки изображения. Как показано на фиг. 2, для осуществления полного сканирования области цели может быть использована группа спутников, двигающихся в одной орбитальной плоскости. Оптическая система на каждом спутнике выполнена так, что она с помощью управления ориентацией или других средств сканирует перекрывающиеся полосы изображения. Для наведения требуются данные о мгновенном положении и ориентации, которые в известных системах обеспечиваются с помощью точных звездных и земных датчиков, являющихся дорогими и сложными системами. Из-за относительного движения цели и спутника, формирующего изображение, процесс формирования изображения имеет небольшую продолжительность, лежащую в диапазоне от 40 до 60 секунд. В течение этого процесса желательно поддерживать стабильность оптической системы, чтобы предотвратить размытость, искажение или другие дефекты изображения. Было затрачено много усилий, чтобы добиться позиционной стабильности спутниковой платформы, что привело к увеличению сложности соответствующей системы управления ориентацией.
Известная система управления ориентацией, используемая для спутникового формирования изображений, описана в патенте США N 4831699. В этой системе ориентацию космического аппарата регулируют, включая в ответ на сигнал коррекции ориентации осевые и радиальные реактивные двигатели системы управления. Ошибка ориентации определяется на основании сигналов датчиков, контролирующих относительное положение Солнца и Земли. Использование солнечных датчиков или других космических средств контроля ориентации сложно и дорого. Ориентацию регулируют в полете так, чтобы система формирования изображения была направлена на заранее заданную цель и удерживалась в этом положении в течение орбитального полета. В течение полета на спутник действуют вращающий момент, обусловленный Солнцем, движение бортовой аппаратуры и другие факторы, а система управления ориентацией должна непрерывно контролировать и регулировать ориентацию.
Как только данные изображения собраны, они передаются в необработанном виде в приемную станцию, где происходит их обработка, усиление и кодирование для объединения. Сложные компьютерные алгоритмы позволяют собрать обработанные изображения в мозаику, воспроизводя область цели для анализа.
Последние достижения в разработке этих алгоритмов позволяют компенсировать погрешности в наведении и движении оптической платформы. Такие алгоритмы описаны в патенте США N 4688092.
На качество изображения влияет относительное движение системы формирования изображения и цели. Соответственно, в известных системах основной упор делался на стабилизацию посредством управления ориентацией. Текущие допуски на точность наведения и согласованность движения зависят от процесса окончательной обработки изображения, а также от поля наблюдения и от разрешающей способности оптической бортовой аппаратуры. Целью настоящего изобретения является разработка системы, использующей улучшенные алгоритмы уменьшения искажения для увеличения допусков на точность наведения и стабильность с последующим использованием этих увеличенных допусков для упрощения системы и уменьшения ее стоимости.
Система согласно изобретению основана на мощных алгоритмах обработки изображения, которые фильтруют или компенсируют искажения, обусловленные движением Земли и колебаниями ориентации платформы. Благодаря использованию идентификации наземных ориентиров составление мозаики изображений менее зависит от точных данных и отпадает потребность в непрерывном определении ориентации с помощью звезд и Земли. Это увеличивает диапазон допуска, которому должна удовлетворять система наведения. Для определения мгновенной ориентации спутника используется приемник глобальной системы местоопределения, а с помощью простой системы управления по трем координатам может быть осуществлена такая ориентация спутника, при которой система формирования изображения направлена на цель. Эта система наведения достаточно точна, чтобы программное обеспечение обработки изображения могло объединить изображения, используя идентификацию наземных ориентиров.
Было установлено, что, когда система формирования изображения направлена на цель в пределах приемлемых допусков, источником наиболее существенного искажения являются колебания ориентации, вызванные системой управления ориентацией. В системе согласно изобретению предусмотрены средства для отключения системы управления ориентацией, чтобы избежать помех во время процесса формирования изображения. Любые искажения из-за дрейфа в течение формирования изображения компенсируются программным обеспечением окончательной обработки и за счет увеличения поля наблюдения для уменьшения влияния движения.
Система содержит опорную систему определения местоположения спутника и его ориентации в пространстве, использующую данные глобальной системы местоопределения, бортовой компьютер для анализа и выработки команд, зависящих от местоположения и ориентации, систему управления ориентацией для регулирования ориентации космического корабля в ответ на команды компьютера, систему формирования изображения, реагирующую на команды компьютера, для выработки и передачи данных изображения и наземные приемник данных изображения и систему окончательной обработки для объединения данных изображения, кодирования данных и составления из последовательных изображений мозаики, изображающей цель. Чтобы избежать искажения изображения из-за движения космического корабля, обусловленного регулированием ориентации, бортовой компьютер прерывает формирование команд управления ориентацией на период процесса приема данных изображения.
Ниже будет описан предпочтительный вариант выполнения изобретения со ссылками на прилагаемые чертежи, где:
на фиг. 1 изображены орбитальный космический корабль и его компоненты согласно изобретению,
на фиг. 2 изображен орбитальный космический корабль согласно изобретению и показан процесс формирования изображения,
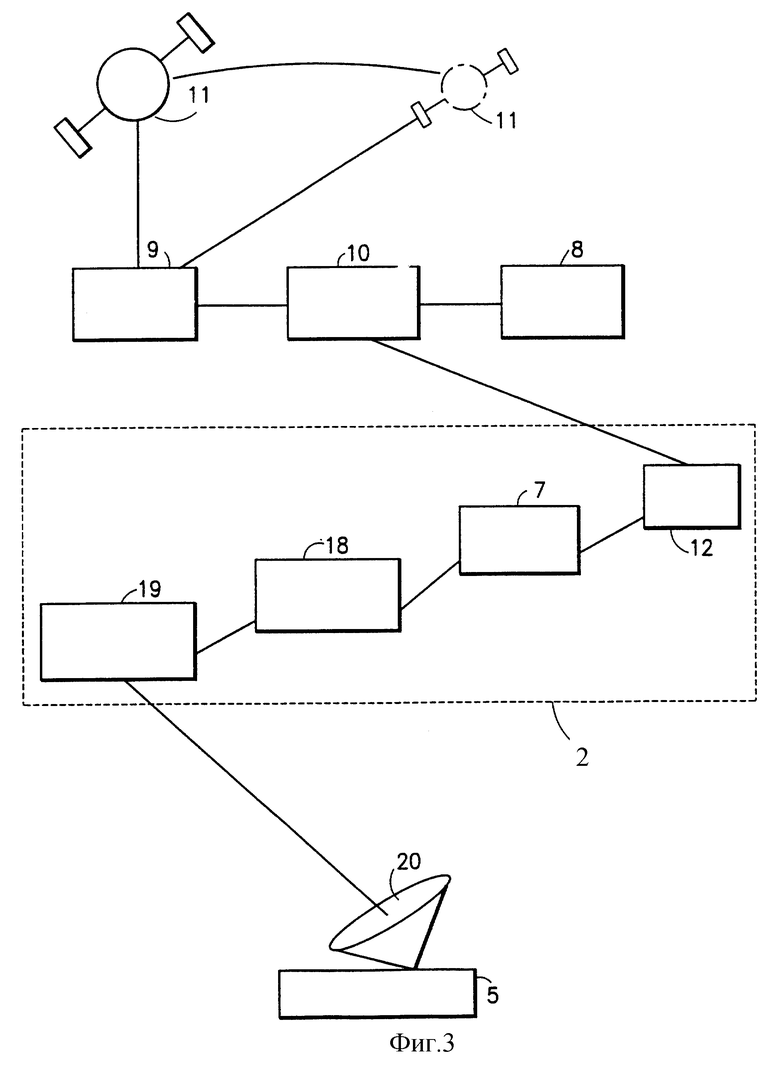
на фиг. 3 изображена блок-схема системы управления космическим кораблем согласно изобретению,
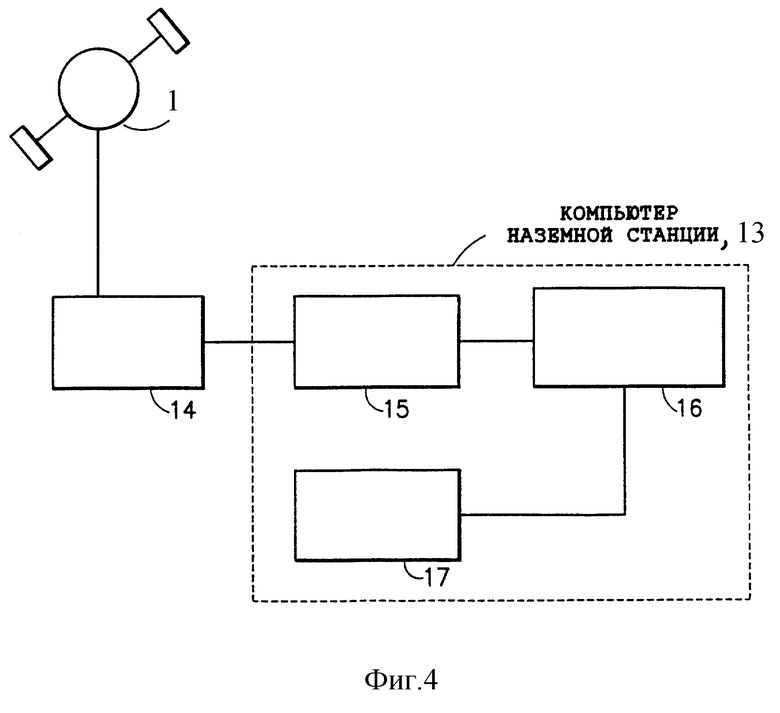
на фиг. 4 изображена блок-схема наземной системы управления согласно изобретению.
Согласно изобретению космический корабль 1, изображенный на фиг. 1, предназначен для несения системы 2 формирования изображения, которая принимает данные цели 3 и передает эти данные в наземную приемную станцию 5 для обработки. Для выполнения этой задачи космический корабль 1, формирующий изображение, располагают на заранее заданном участке 6 орбиты, соответствующем географическому положению цели, как показано на фиг. 2. Основные компоненты системы включают бортовую систему, которая содержит систему 2 формирования изображения, систему 8 управления ориентацией, приемник 9 данных положения и ориентации и бортовой компьютер 10. Выходной сигнал системы 2 формирования изображения передается на наземную приемную станцию 5, которая содержит приемник 14, процессор 15 изображения, идентификатор 16 местоположения и генератор 17 изображения.
Центральной частью системы является бортовой компьютер 10, который после запуска космического корабля и выведения его на орбиту служит для управления ориентацией космического корабля и контроля его местоположения. Это достигается тем, что он способен принимать данные о фактическом положении и ориентации от удаленной опорной системы и сравнивать эти данные с заранее заданными данными. После этого компьютер 10 способен генерировать команды управления ориентацией для регулирования положения космического корабля и достижения заданной ориентации, то есть такой, когда система 2 формирования изображения направлена на цель.
В качестве удаленной опорной системы в системе согласно настоящему изобретению применена глобальная система местоопределения (GPS), в настоящее время развернутая в космосе для использования судами и самолетами для контроля их положения. Глобальная система местоопределения представляет собой группу орбитальных спутников 11, которые передают синхронизированные сигналы, показывающие положение этих спутников в группе. Приемные станции на транспортном средстве могут идентифицировать сигналы и местоположение множества спутников и, используя временные параметры передаваемых сигналов, установить положение приемной станции просто и со значительной точностью.
Известно использование глобальной системы местоопределения для космической навигации и управления ориентацией космического корабля, в частности в работе "GPS Attitude and Orbit Determination for Space", Brock et al, ION GPS Conference, September 20-23, 1994, описан подходящий приемник глобальной системы местоопределения для развертывания в космосе. В этом изобретении каждый сигнал глобальной системы местоопределения в дополнение к информации, идентифицирующей определенный спутник 11 глобальной системы местоопределения, который послал этот сигнал, содержит также информацию о времени передачи сигнала глобальной системы местоопределения от каждого из соответствующих спутников 11 глобальной системы местоопределения. Каждый приемник 9 глобальной системы местоопределения содержит известный вычислительный блок, который, после регистрации временных задержек сигналов глобальной системы местоопределения от соответствующих спутников, вычисляет собственное положение приемника. Приемник 9 данных положения и ориентации космического корабля 1 содержит многоэлементные антенны 12, которые неподвижны относительно опорных координат космического корабля. Значения относительных времен приема сигнала каждой антенной в группе позволяет вычислить относительное положение каждой антенны. На основании этой информации можно определить мгновенное положение космического корабля 1. Таким способом данные о фактическом положении и ориентации могут быть собраны и переданы в компьютер 10.
Управление ориентацией осуществляют в ортогональных координатных осях x, y и z, как показано на фиг. 1. Номинальная ориентация этих осей определяется плоскостью, заданной линией, соединяющей центр массы Земли с центром массы космического корабля, и направлением орбитального движения, то есть плоскостью орбиты. Требуемую ориентацию x', y' и z' устанавливают так, чтобы линия 4 визирования датчика 7 данных изображения была направлена на цель в течение времени сбора данных изображения.
Система 8 управления ориентацией представляет собой активную систему, использующую реактивные двигатели для создания добавочного перемещения космического корабля для коррекции крена, рыскания и тангажа в опорных координатах, как изображено на фиг. 1. Эта трехкоординатная система управления хорошо известна и описана, например, в патентах США N 3367155 и N 3984071. Система 8 управления ориентацией приводится в действие сигналами коррекции, вырабатываемыми компьютером 10.
Система 2 формирования изображения может использовать любое подходящее оптическое устройство 12, например телескоп, которое может подавать данные изображения в фоточувствительный элемент датчика 7. Датчик 7 преобразовывает собранные данные изображения в электрические сигналы, которые обрабатываются процессором 18 изображения для передачи их передатчиком 19 в приемную станцию 5. Хотя параметры системы 2 формирования изображения могут быть отрегулированы так, чтобы удовлетворить требованиям решаемой задачи, желательно обеспечить такое поле наблюдения, которое минимизирует искажения, вызванные относительным движением космического корабля и цели при желаемой высоте, соответствующей решаемой задаче. Систему 2 устанавливают на космическом корабле в фиксированном или регулируемом положении. В фиксированном положении юстировка линии 4 визирования датчика 7 изображения достигается исключительно регулированием ориентации. Регулируемое крепление может обеспечить дополнительную юстировку линии 4 визирования для ее совмещения с целью 3. Положение линии 4 визирования относительно координат космического корабля всегда известно. В компьютер 10 введены данные о заранее заданной ориентации (x', y', z'), при которой линия 4 визирования направлена на цель 3 в течение процесса сбора данных изображения.
Наземная приемная станция 5 состоит из следящих антенн 20, выполненных с возможностью приема сигналов данных изображения и подачи этих сигналов в компьютер 13 наземной станции. Компьютер наземной станции запрограммирован так, чтобы обрабатывать сигналы изображения, компенсируя искажения. Каждое изображение идентифицируют относительно его местоположения в пределах цели 3 и затем собирают в составную мозаику полного изображения цели 3.
Для компенсации относительного движения оптической системы 2 и цели 3 компьютер 13 наземной станции использует улучшенные моделирующие алгоритмы для уменьшения искажений, например, описанные в патенте США N 4688092. Это позволяет использовать менее точную систему опорных данных глобальной системы местоопределения вместо известной сложной системы звездной ориентации. В известных системах координаты каждого изображения устанавливали относительно космических данных и затем изображения собирали. Было обнаружено, что при использовании улучшенных алгоритмов основной причиной искажения изображения является резкое движение, обусловленное системой 8 управления ориентацией.
В системе согласно настоящему изобретению компьютер 13 наземной станции связан с базой данных, содержащей данные об известных наземных ориентирах, которые непрерывно сравниваются с данными изображения, полученными от космического корабля 1. Каждое изображение идентифицируют с помощью географических координат известного наземного ориентира и устанавливают положение изображения относительно смежного изображения. С помощью методов идентификации наземных ориентиров, как описано в указанном выше патенте США N 4688092, мозаика изображений может быть точно составлена компьютером 13.
Процесс формирования изображения инициируется бортовым компьютером 10 после того, как ориентация космического корабля отрегулирована так, что линия 4 визирования захватывает цель, а космический корабль расположен над целью. На фиг. 2 показано сканирование пойманного изображения и иллюстрируется, как с помощью многократного прохождения или многочисленных космических кораблей можно получить сегменты изображения цели для объединения. Для задач, которые связаны с конкретными географическими объектами ограниченного размера, система 2 формирования изображения запускается только в течение короткого периода времени. Если космический корабль находится на орбите высотой от 500 до 600 км, то за период формирования изображения, занимающий от 50 до 60 секунд, перекрывается приблизительно 350 км земной поверхности.
Так как процесс сбора данных изображения имеет ограниченную продолжительность, компьютер 10 запрограммирован так, чтобы отложить регулирование ориентации на то время, пока система 2 формирования изображения находится в активном состоянии. Это предотвращает создающие искажения движения, обусловленные системой 8 управления ориентацией, в течение сбора данных изображения. В течение этого периода космический корабль 1 будет отклоняться от заданной ориентации под влиянием вращательного момента, обусловленного Солнцем, и других факторов, но алгоритмы обработки изображения наземного компьютера 13 скомпенсируют это движение. В результате, при общем упрощении системы будет получено высококачественное изображение.
Изобретение относится к технике управления объектами. Достигаемый технический результат - снижение изображений цели, вызванных регулированием ориентации космического корабля. Система содержит опорную систему определения местоположения и пространственной ориентации спутника, использующую данные глобальной системы местоопределения, бортовой компьютер для анализа и формирования команд, зависящих от местоположения и ориентации, систему управления ориентацией для регулирования ориентации космического корабля в ответ на команды компьютера, систему формирования изображения, реагирующую на команды компьютера для формирования и передачи данных изображения, а также наземные приемник данных изображения и систему окончательной обработки для объединения данных изображения, их координирования и соединения последовательных изображений в мозаику, дающую изображение цели. 2 с. и 4 з.п.ф-лы, 4 ил.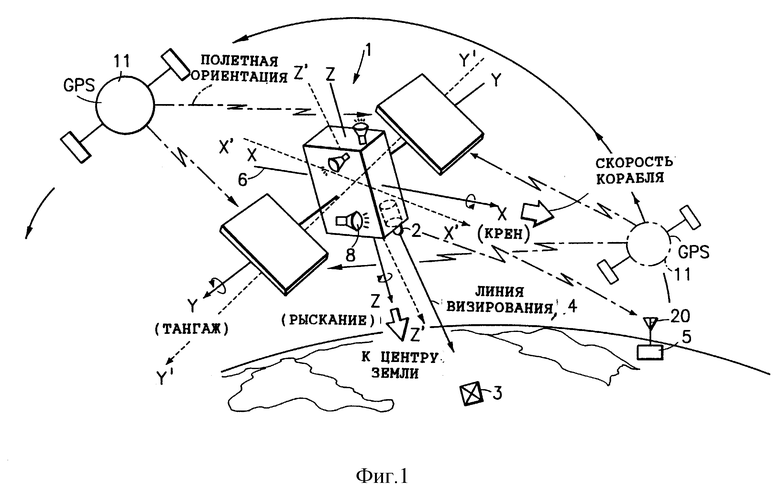
| Зарубежная радиоэлектроника, N 6 | |||
| - М.: Радио и связь, 1989, с | |||
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| US 4688092 A, 18.08.1987 | |||
| US 4837699 A, 08.06.1989 | |||
| US 3984071 A, 05.10.1976. | |||

