Настоящее изобретение относится к способу локализации передатчиков.
Изобретение может быть использовано в области высокочастотной радиопеленгации для локализации радиопередатчиков одной станцией, известного в виде аббревиатуры ЛОС.
В полосе высоких частот от 1 до 30 МГц большую часть коммуникаций осуществляют с использованием распространения радиоволн в ионосфере. Благодаря отражению радиоволн от ионизованных слоев атмосферы этот способ распространения радиоволн позволяет обеспечить дальнюю связь. Оборудование для ЛОС обычно содержит антенную решетку, присоединенную к устройству обработки сигнала, позволяющему путем триангуляционных расчетов определить азимут и место каждой падающей радиоволны, принятой антенной решеткой. Определение углов азимута и места осуществляют интерферометром, с помощью которого измеряют фазовый сдвиг сигналов, принятых разными антеннами сети.
Эта методика позволяет, например, с помощью трех радиопеленгаторов определить географическое место источника сигнала по азимуту, выданному каждым радиопеленгатором, как место пересечения трех соответствующих пеленгов. Таким образом, для достижения высокой точности необходимо, чтобы радиопеленгаторы были расположены на значительных расстояниях один от другого относительно локализуемого источника сигнала.
Для локализации источников излучения, удаленных, например, на расстояние более 1000 км, эта методика также позволяет использовать только один интерферометрический радиопеленгатор, с помощью которого по азимуту определяют расстояние, отделяющее источник излучения от радиопеленгатора, причем это расстояние вычисляют в зависимости от условий распространения радиоволн в верхних слоях атмосферы.
Последний способ характерен тем, что он позволяет, например, локализацию передатчиков, когда из-за географических причин, срока установки, отсутствия оборудования полный канал локализации методом триангуляции не может быть осуществлен.
До настоящего времени ЛОС осуществляли с помощью узкополосных радиопеленгаторов с последовательным определением фазы или с помощью радиопеленгаторов с параллельным определением фазы путем соответствующих измерений при одной и той же поляризации, при этом поляризация антенн часто отличается от поляризации падающих радиоволн. Поскольку каждая падающая радиоволна поляризована эллиптически и может рассматриваться как результат взаимодействия радиоволны с круговой правой поляризацией и радиоволны с круговой левой поляризацией, использование при ЛОС только одного вида поляризации неизбежно приводит к уменьшению поляризации. Для устранения этого явления разработаны системы, работающие с поляризацией, называемой "автоматической", но одновременно только с одним видом поляризации падающей радиоволны. Поскольку эти системы всегда переключаются на поляризацию, которая дает более высокий уровень сигнала, уменьшения поляризации не происходит. Однако в этих системах поляризация антенн не всегда достаточно приспособлена к поляризации падающих радиоволн, что приводит к снижению уровня приема сигнала.
Для локализации передатчика методом триангуляции с использованием трех радиопеленгаторов системы с автоматической поляризацией дают удовлетворительные результаты, т. к. все моды распространения радиоволн в ионосфере позволяют точно вычислить азимут с дисперсией или ошибками. Однако при этом измерение является менее точным, чем при вычислении азимута с учетом компонент поляризации сигнала.
При локализации радиопередатчика с помощью одной станции решение задачи является более сложным, т. к. разные моды распространения с одинарным или двойным отражением, распространения радиоволн в различных слоях ионосферы, земных радиоволн или ионосферных радиоволн, обычных или особых мод для одного и того же источника после обработки дают различные значения местоположения. Обработка только одной поляризации в этих условиях приводит только к потере информации и исключению из обработки некоторых мод распространения.
В наилучшем случае, если моды распространения перекрываются, определение местоположения является менее точным. Но в других случаях полученное расстояние до источника излучения может быть полностью ложным, например, если значение места падающей радиоволны с определенной поляризацией не может быть учтено с различением и ионосферной радиоволны или радиоволны с одинарным отражением, и радиоволны с двойным отражением.
Целью изобретения является решение этой задачи с одновременным использованием двух поляризаций сигнала, принятого одной станцией ЛОС.
Цель изобретения достигается в способе локализации радиопередатчика с помощью радиопеленгатора на одной станции, отличающемся тем, что он заключается в выполнении измерений по азимуту и месту каждой принятой радиоволны, разделенной на первую, обычную радиоволну с правой круговой поляризацией и вторую, особую радиоволну с левой круговой поляризацией, в построении двух гистограмм расстояния по месту, относящихся к каждой из двух радиоволн, с помощью двух кривых прогнозирования место/расстояние, связанных с распространением обычной и особой радиоволн, и в вычислении по этим двум гистограммам общего расстояния до передатчика.
Другие характеристики и преимущества изобретения приведены ниже в описании и прилагаемых чертежах, на которых:
- фиг.1 - распределение ионизованных слоев земной атмосферы;
- фиг. 2A - 2E - несколько мод распространения радиоволн в слоях ионосферы;
- фиг. 3 - пример осуществления одного из n приемных каналов радиопеленгатора согласно изобретению;
- фиг.4 - пример осуществления способа согласно изобретению в виде блок-схемы;
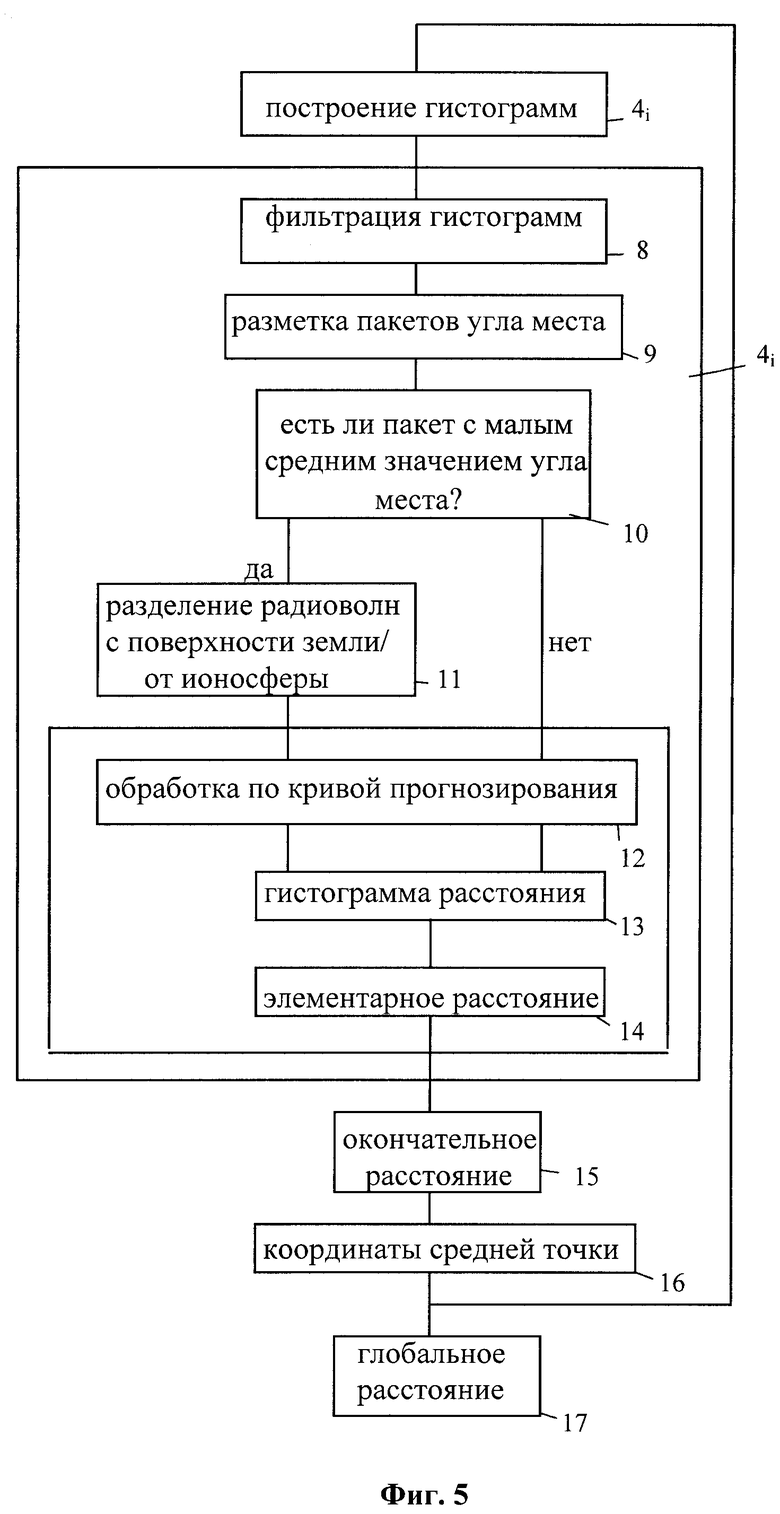
- фиг.5 - алгоритм выполнения этапов обработки для разметки пакетов места и вычисления расстояния, как показано на фиг.4;
- фиг. 6А, 6Б и 6В - гистограммы, используемые для локализации радиопередатчиков по месту;
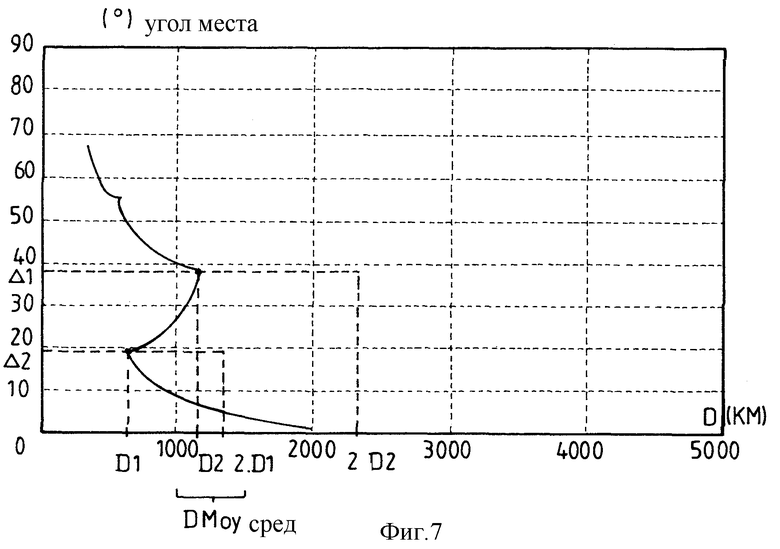
- фиг.7 - кривая ионосферного прогнозирования.
Как показано на фиг.1, ионосфера - это ионизированная область земной атмосферы, расположенная на расстоянии 50-200 км над земной поверхностью. Она делится на несколько слоев D, E, F1, F2, слой D является только поглощающим.
Для заданных частоты, угла и места в общем случае возможнo несколько мод распространения радиоволны, как показано на фиг.2А-2Е. Для расстояния менее 2500 км существуют только простые моды, обозначенные 1E, 1F на фиг.2А, или двойные, обозначенные 2Е, 2F на фиг.2Б. Но нет смешанных мод, представленных на фиг. 2B-2E.
Поскольку ионосфера - это анизотропная среда, в общем случае существуют две характеристические радиоволны, связанные с заданным углом излучения: обычная радиоволна и особая радиоволна. С учетом конфигураций, называемых квазипродольными, которые хорошо описывают природу явления, можно показать, что эти две волны имеют круговую поляризацию, соответственно правую и левую.
В каждой моде распространения эти две радиоволны распространяются двумя легкоразличимыми путями. Особая волна обычно более ослаблена, чем обычная радиоволна, и имеет несколько больший угол места, чем последняя. Однако обычные и особые радиоволны часто распространяются двумя различными путями. Например, обычная радиоволна может распространяться как земная радиоволна, в то время как особая радиоволна распространяется, отражаясь от слоя E.
В способе согласно изобретению оптимально использованы характеристики падающей радиоволны, описанные выше. Ввиду того, что существуют две разные радиоволны, их обрабатывают раздельно, поскольку данные, приносимые каждой из радиоволн, являются специфичными. Как показано на фиг.3, для осуществления изобретения используют рамочные крестообразные антенны 1. Два сигнала, полученные на выходе антенн 1, комбинируют гибридной микросхемой 2 со сдвигом на 90 градусов. Она разделяет сигнал, принятый антеннами 1, на сигнал с правой и левой поляризацией, позволяя таким образом отделить обычную волну (O) от особой волны (X). Орган 3 обработки, представляющий собой устройство обработки сигнала или другое эквивалентное устройство, позволяет выполнять обработку радиоволн (O) и (X) в реальном масштабе времени. Эта обработка происходит согласно этапам 47 блок-схемы, представленной на фиг.4, благодаря переключению поляризации одного вида в другой после каждого элементарного измерения сигнала. На этапах 41 и 42 строят и с учетом кривых прогнозирования расстояния обрабатывают две гистограммы расстояния. Две волны (O) и (X) особым образом обрабатывают на этапах 51, 52 и 61, 62 для вычисления элементарных расстояний с использованием двух различных кривых прогнозирования элементарного расстояния.
Затем на этапе 7 по элементарным расстояниям, однозначно соответствующим кривой прогнозирования, определяют окончательное расстояние.
Этот принцип может быть использован в случаях, когда обработка с единственной поляризацией дает неоднозначные результаты.
Практически во многих случаях возможно выделить земные радиоволны, отделить простые и двойные отражения, что дает меньшие погрешности и более высокую точность.
Вычисление расстояния до передатчика выполняется для каждой гистограммы 4i, как показано на блок-схеме фиг.5.
Каждая гистограмма угла места строится по результатам измерений в реальном масштабе времени радиоволн правой и левой поляризации в течение T последних секунд сбора элементарных данных пеленгации. T - время вычисления, I-й столбец каждой гистограммы содержит число измерений, выполненных за T секунд, которые дали значение места в интервале (I град. I+1 град.) для заданной поляризации.
Поскольку различные физические явления, происходящие в ионосфере, приводят к ошибкам и дисперсии значений углов, вычисленных по принятым сигналам, на этапе 8 для исключения случайных или ошибочных значений и повышения веса корректных значений места выполняется фильтрация гистограмм.
Зная для каждого столбца гистограмм его процент присутствия в совокупности результатов, перегруппировкой столбцов можно построить пакеты места, определенные их границами, образованными двумя минимумами, и их средневзвешенное значение места по весам столбцов, как показано на фиг.6А, 6Б и 6В. Эта перегруппировка выполняется на этапе 9.
Анализ двух гистограмм и совокупности пакетов, соответствующих каждой из этих гистограмм и, в частности, малых значений места, позволяет на этапах 10 и 11 определить, является ли принятое излучение земной радиоволной или радиоволной, пришедшей от ионосферного слоя после одного или нескольких отражений. Этот этап обработки является очень важным, т.к. он позволяет использовать отличие в поляризации для выполнения обработки, которая невозможна при использовании одинарной поляризации.
Часто обычная радиоволна распространяется как радиоволна с земной поверхности, в то время как особая волна распространяется простым отражением от слоя E, или волна O распространяется двойным отражением, в то время как радиоволна X распространяется простым отражением.
Расчет предварительных значений расстояния происходит на этапах 12, 13 и 14.
Для выполнения этого расчета можно использовать известную программу HRMNTH CCIR (база данных Нью-Дели). Эта программа позволяет создать файл прогнозирования, относящийся к заданному месту. Затем по данным программы HRMNTH выполняется моделирование соответствия согласно рекомендациям Доклада 640-4, том VI CCIR.
Это моделирование выполняется с использованием для слоя Е формулы Мегглетона (MEGGLETON) для режима минимума кривой и слоя F1 модели Дика и Брэдли (DICK&BRADLEY) и модели Брэдли-Дюдени (BRADLEY-DUDENEY) для слоя F2.
Таким образом, пути распространения радиоволн в ионосфере определяются программой трассировки лучей исходя из знания вертикального распределения электронной плотности.
Строятся две кривые, типа представленных на фиг.7: одна для обычной моды, другая - для особой.
Файл прогнозирования позволяет получить для заданных времени, даты, частоты и места совокупность расстояний, соответствующих требуемым местам (гистограммам), и так для каждой из двух мод.
Прогноз осуществлен для средних значений места каждого пакета и для каждой гистограммы. На этапе 14 создают четыре таблицы, т.к. каждой гистограмме последовательно соответствуют две кривые.
Из 4 предыдущих таблиц с помощью обработки, выполняемой на этапах 5i для отделения простых и двойных отражений, выбирают 4 элементарных расстояния, по этим 4 элементарным расстояниям Dлоб, Dлос, Dпоб, Dпос на этапе 15 путем перекрытия средневзвешенного значения двух расстояний, наиболее соответствующих двум различным гистограммам и двум различным кривым распространения, вычисляют окончательное значение расстояния.
С этим расстоянием связаны радиальная ошибка, продольная ошибка, весовой коэффициент и переменная, указывающая, присутствует ли в одной из гистограмм мода с двойным отражением. Радиальная ошибка прямо зависит от стандартного отклонения азимута. Продольная ошибка зависит от качества элементарных измерений и дисперсии значений места этих измерений.
Эти две ошибки определяют доверительный интервал локализации (эллипс погрешности).
После каждого вычисления расстояния на этапе 16 вычисляются географические координаты не только для выдачи их оператору, но и для использования в вычислениях. Это позволяет с помощью адаптивной обработки, не представленной на блок-схеме, выдавать текущие прогнозируемые значения для средней точки, соответствующей предварительно вычисленному расстоянию, пока оператор работает с одним и тем же передатчиком. Во время первой локализации этим координатам присваивают значения координат пеленгатора.
Пока оператор работает с одним и тем же передатчиком, например, две секунды, новое значение расстояния может храниться в буферном регистре.
Согласно этапу 17 оператор в любой момент может запросить глобальное местоположение, определенное по предварительно вычисленным N элементарным расстояниям.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ КАЛИБРОВКИ РАДИОПЕЛЕНГАТОРА-ДАЛЬНОМЕРА | 2005 |
|
RU2309425C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПРОСТРАНСТВЕННОГО РАСПРЕДЕЛЕНИЯ ИОНОСФЕРНЫХ НЕОДНОРОДНОСТЕЙ | 2013 |
|
RU2529355C2 |
| СПОСОБ АДАПТИВНОЙ РАДИОСВЯЗИ НА ДАЛЬНИХ РАДИОТРАССАХ В ДКМВ ДИАПАЗОНЕ | 2011 |
|
RU2479125C1 |
| СПОСОБ КАЛИБРОВКИ ДЕКАМЕТРОВОГО РАДИОПЕЛЕНГАТОРА-ДАЛЬНОМЕРА | 2010 |
|
RU2422846C1 |
| СПОСОБ ТРАНСЭКВАТОРИАЛЬНОЙ РАДИОСВЯЗИ В ДКМВ ДИАПАЗОНЕ | 2006 |
|
RU2323524C1 |
| Способ однопозиционного определения координат источников радиоизлучений коротковолнового диапазона радиоволн при ионосферном распространении | 2019 |
|
RU2713188C1 |
| ИОНОСФЕРНЫЙ ЗОНД-РАДИОПЕЛЕНГАТОР | 2009 |
|
RU2399062C1 |
| СПОСОБ МНОГОПОЗИЦИОННОГО ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ДКМВ ПЕРЕДАТЧИКОВ | 2004 |
|
RU2285935C2 |
| СПОСОБ КАЛИБРОВКИ КОМПЬЮТЕРНО-ИНТЕРФЕРОМЕТРИЧЕСКИХ СИСТЕМ НА ПОДВИЖНЫХ ПЛАТФОРМАХ | 2005 |
|
RU2284043C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МАКСИМАЛЬНО ПРИМЕНИМОЙ ЧАСТОТЫ ДЛЯ ИОНОСФЕРНОЙ РАДИОСВЯЗИ | 2012 |
|
RU2516239C2 |




Способ осуществляется на радиопеленгаторе одной станции. Он заключается в измерении углов азимута и места каждой принятой радиоволны, разложенной на первую, обычную волну с правосторонней круговой поляризацией и вторую, особую волну с левосторонней круговой поляризацией, в построении двух гистограмм по расстоянию и по углу места для каждой из двух волн по двум кривым прогнозирования угол места/расстояние, связанных с распространением обычной и особой радиоволн, и в вычислении на этапе по этим двум гистограммам глобального расстояния до передатчика. Изобретение применимо для локализации радиопередатчиков, расположенных на расстоянии от радиопеленгатора, превышающем 1000 км, что и является достигаемым техническим результатом. 3 з.п. ф-лы, 7 ил.
| Мольтедо Жерар | |||
| Методы интерферометрии, используемые в радиопеленгаторах фирмы ТОМСОН-ЦСФ, В: "Ревю техник", 1987, N 19, с.250 - 287, издательство Готье-Виллар, Париж, Франция | |||
| RU 2003131 C1, 15.11.1993 | |||
| КОАЛЕСЦЕНТНЫЙ ФИЛЬТР ДЛЯ ОЧИСТКИ СТОЧНЫХ ВОД С ПРЕДВАРИТЕЛЬНОЙ ФИЛЬТРАЦИЕЙ МЕХАНИЧЕСКИХ ПРИМЕСЕЙ И ВЗВЕШЕННЫХ ВЕЩЕСТВ | 2022 |
|
RU2805225C2 |
| DE 4026390 C1, 09.01.1992 | |||
| US 5252513 A, 21.12.1993. | |||
