Изобретение относится к радиотехнике и предназначено для пассивного определения местоположения объектов по излучениям их ДКМВ передатчиков с использованием двух или более приемных станций (пеленгаторов-дальномеров).
С появлением и совершенствованием систем связи и радиотехнического обеспечения, использующих сложные сигналы с малой спектральной плотностью мощности, возникают проблемы, связанные с определением с высокой точностью местоположения множества однотипных ДКМВ передатчиков многопозиционными системами. В основе этих проблем лежит противоречие: с одной стороны, в связи с повышенной энергетической скрытностью сложных сигналов необходимо минимизировать число приемных позиций системы измерения, а с другой, для сохранения однозначности результатов требуется увеличение числа позиций.
Известен способ многопозиционного определения местоположения объектов по излучениям их ДКМВ передатчиков [1], включающий пеленгование радиопередатчиков с помощью наземных пеленгационных станций, распределенных в определенных точках земной поверхности, вычисление посредствам триангуляции с помощью центрального вычислителя, связанного с пеленгационными станциями, положения на земной поверхности передатчиков, запеленгованных станциями, визуализацию на экране графического пульта, связанного с центральным вычислителем, соответствующих положений передатчиков относительно пеленгационных станций.
Основным недостатком данного способа является необходимость использования для определения местоположения как минимум трех пеленгационных станций.
Известен способ многопозиционного определения местоположения объектов по излучениям их ДКМВ передатчиков [2], свободный от этого недостатка и принятый за прототип, включающий:
- прием и синхронное преобразование на нескольких станциях принятых радиосигналов в цифровые сигналы;
- восстановление из цифровых сигналов момента прихода и азимутального пеленга каждого принятого радиосигнала;
- определение в центральном вычислителе, связанном со всеми станциями, разности моментов прихода совпадающего по частоте радиосигнала на две станции и соответствующей этой разности линии положения на поверхности Земли;
- вычисление координат точки пересечения линии положения и пеленга одной из станций;
- идентификацию координат точки пересечения в качестве предварительных координат местоположения источника радиосигнала;
- повторение операций определения предварительных координат источника всеми возможными парами станций;
- вычисление местоположения источника радиосигнала объединением предварительных координат.
Этот способ при определении местоположения множества однотипных ДКМВ радиопередатчиков теряет свою эффективность. Известно, что поверхностные волны передатчика ДКМВ резко затухают на удалениях более 15 км при распространении вдоль земной поверхности и на удалениях более 200 км при распространении вдоль водной поверхности. В связи с этим основным механизмом распространения ДКМВ на трассах до 10000 км является многоскачковое ионосферное распространение, при котором из-за отличия групповой скорости распространения сигнала фактическая разность моментов прихода радиосигнала на две станции может существенно отличаться от случая распространения в свободном пространстве.
Таким образом, использование для определения координат ДКМВ передатчиков способа-прототипа, основанного на комбинации угломерного и разностно-дальномерного способов и реализуемого как минимум двумя приемными станциями, может приводить к существенным ошибкам местоположения в связи с наличием:
- аномальных ошибок измерения азимутального пеленга, вызванных наклонами отражающего слоя ионосферы;
- аномальных ошибок определения линии положения, вызванных отличием групповой скорости распространения радиоволн в ионосфере и свободном пространстве.
Повышение точности многопозиционного определения местоположения ДКМВ передатчиков при использовании способа-прототипа может быть обеспечено гистограммной обработкой или усреднением результатов измерений для подавления влияния наклонов отражающего слоя ионосферы на точность определения местоположения. Однако этот путь не решает проблему, так как требует как минимум суточного цикла наблюдений, что приводит к потере его практической ценности.
Техническим результатом изобретения является повышение точности определения местоположения множества однотипных ДКМВ передатчиков по более широкому классу сигналов, включая сложные сигналы с малой спектральной плотностью мощности, за счет устранения аномальных ошибок измерений на основе комбинации однопозиционного и многопозиционного способов определения координат.
Для достижения указанного технического результата предлагается способ многопозиционного определения местоположения объектов по излучениям их ДКМВ передатчиков, включающий прием и синхронное преобразование принятых радиосигналов в цифровые сигналы на нескольких приемных станциях, согласно изобретению, из цифровых сигналов восстанавливают поток импульсных сигналов, описывающий состояния излучения и паузы в излучении передатчиков на частоте приема, и азимутальный и угломестный пеленги, соответствующие каждому импульсу, преобразуют восстановленный поток импульсных сигналов в потоки отдельных передатчиков, отличающиеся электронными адресами (частота, азимут, угол места), для каждого адреса моделируют траекторию обратного многоскачкового распространения радиосигнала из точки приема через ионосферу и восстанавливают координаты точек прихода модельной траектории на поверхность Земли, рассматривают их как предполагаемые точки излучения радиосигнала отдельного передатчика, преобразуют поток сигналов отдельного передатчика с адресом (частота, азимут, угол места) в поток с детализированным адресом (частота, координаты возможных точек излучения), а в центральном вычислителе, связанном со всеми станциями, попарно сравнивают полученные на разных станциях потоки с детализированным адресом и отбирают те пары потоков, у которых есть совпадение координат возможных точек излучения сигналов, для каждой отобранной пары потоков строят ортодромы и вычисляют координаты точки пересечения ортодром, сравнивают координаты точки пересечения ортодром и координаты совпавших точек отобранной пары потоков и при наличии совпадения точек выполняют их объединение и определяют координаты точки, которые идентифицируют как координаты передатчика, соответствующие отобранной паре потоков, для различных пар потоков сравнивают координаты точек, идентифицированных как координаты передатчика, и при наличии совпадения определяют уточненное местоположение передатчика объединением точек с совпавшими координатами.
Предложенная совокупность признаков позволяет использовать при определении местоположения объектов дополнительную информацию о закономерностях ионосферного распространения сигналов ДКМВ. Эта информация учитывается на каждой станции при определении предполагаемых координат объектов однопозиционным способом с использованием модели ионосферы. В центральном вычислителе, который может входить в состав любой станции, путем сопоставления результатов физически различающихся способов оценивания пространственных координат (однопозиционного и многопозиционного) устраняется неопределенность отождествления результатов измерений, полученных на разных станциях, и однозначно определяется местоположение объектов при использовании двух и более станций, что приводит к достижению технического результата.
Операции способа поясняются чертежами:
Фиг.1. Структурная схема устройства многопозиционного определения местоположения ДКМВ передатчиков.
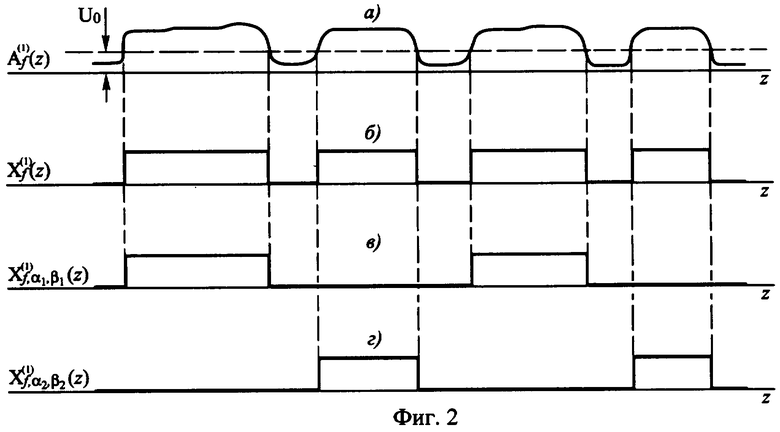
Фиг.2. Потоки сигналов, формируемые на одной из приемных станций системы местоопределения:
Af (1)(z) - после амплитудной демодуляции сигналов на частоте f;
Xf (1)(z) - после преобразования потока демодулированных сигналов Af (1)(z) в поток импульсных сигналов единичной амплитуды, описывающий потоки излучений на частоте f без привязки к конкретному передатчику;
 - после преобразования потока Xf (1)(z) в потоки сигналов, отличающиеся электронными адресами (частота f, азимут α, угол места β) и описывающие состояния излучения и паузы в излучении первого и второго передатчика.
- после преобразования потока Xf (1)(z) в потоки сигналов, отличающиеся электронными адресами (частота f, азимут α, угол места β) и описывающие состояния излучения и паузы в излучении первого и второго передатчика.
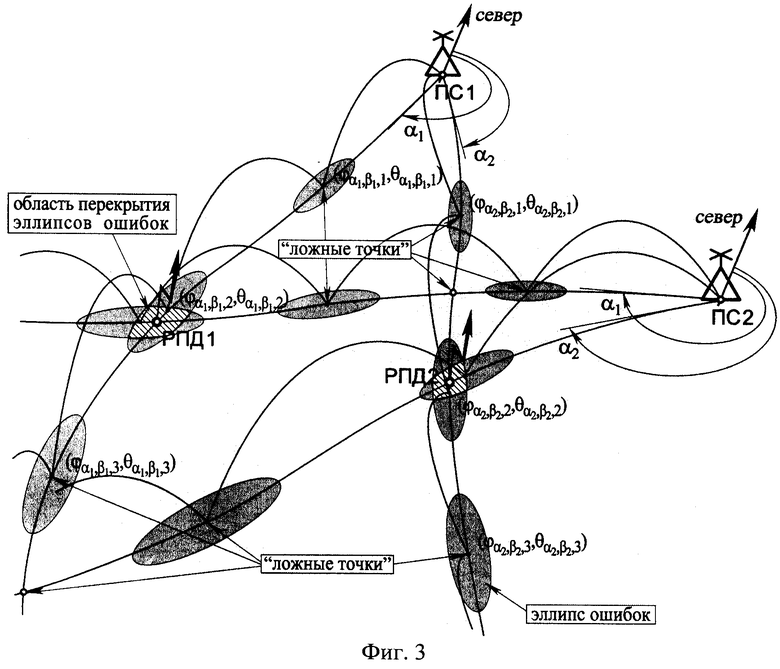
Фиг.3. Схема функционирования системы определения местоположения с использованием двух приемных станций (пеленгаторов-дальномеров).
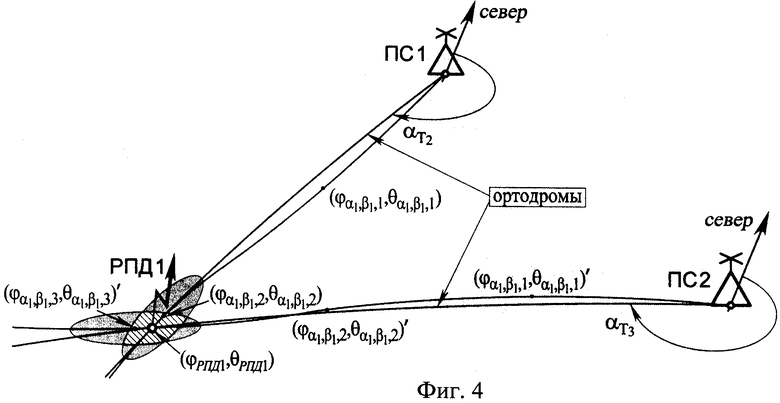
Фиг.4. Особенности двухпозиционного определения местоположения.
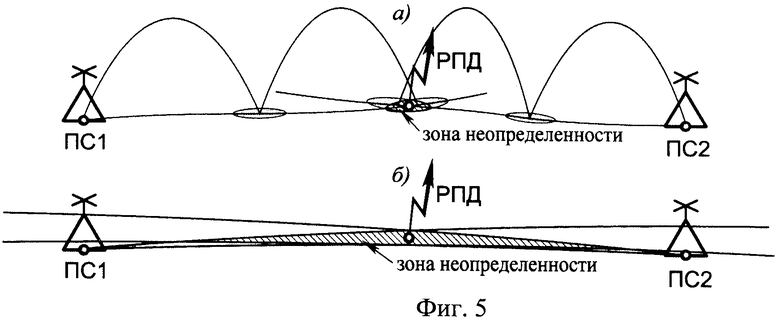
Фиг.5. Особенности объединения возможных точек излучения сигналов.
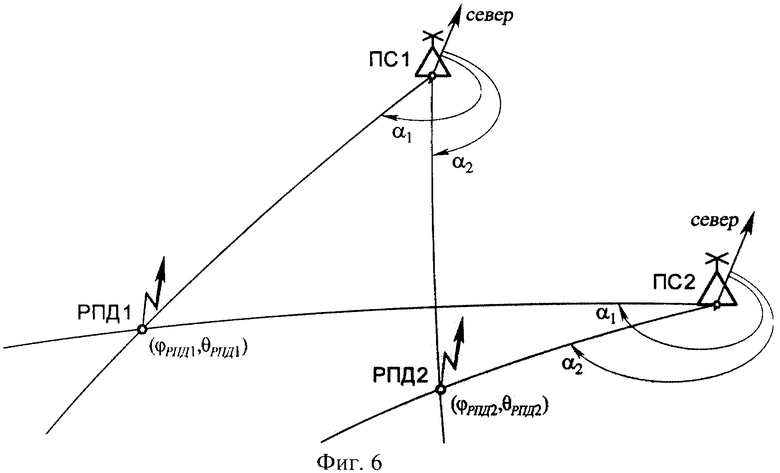
Фиг.6. Форма отображения информации о местоположении.
Устройство (фиг.1) содержит К приемных станций (ПС), каждая из которых включает последовательно соединенные антенную систему 1, многоканальное радиоприемное устройство (РПУ) 2, многоканальный аналого-цифровой преобразователь (АЦП) 3, блок дискретного преобразования Фурье (ДПФ) 4 и радиомодем 5. Каждая станция через линию радиосвязи 6 связана с центральным вычислителем (ЦВ) 7, включающим последовательно соединенные радиомодемы 8, запоминающее устройство (ЗУ) 9, блок идентификации 10, блок обработки ортодром 11, блок сравнения координат 12 и блок индикации 13.
Регистрация сигналов на всех станциях синхронизирована по времени от внешнего источника (приемник сигнала синхронизации не показан), что обеспечивает одновременный старт АЦП 3 всех станций. Синхронизация необходима для корреляции высокочастотных полей передатчиков когерентно принятых разными антеннами решетки при оптимальной частотно-временной локализации сигналов и двумерном пеленговании [3]. Кроме внешнего сигнала высокостабильных часов, излучаемого, например, со спутника, возможна синхронизация времени от внутренних часов с высокостабильным опорным источником, установленных на центральном вычислителе 7 и на каждой станции. В последнем случае необходимо периодическое сличение часов, например, с использованием реперного источника.
Антенная система 1 содержит опорную антенну с номером n=0 и N антенн с номерами n=1...N, объединенные в решетку. Многоканальное РПУ 2 выполнено с общим гетеродином и с полосой пропускания каждого канала, превышающей ширину спектра сигнала передатчика. Общий гетеродин обеспечивает многоканальный когерентный прием сигналов, что является основным условием интерферометрической (голографической) регистрации комплексных сигналов волновых полей передатчиков. Широкая полоса пропускания каналов РПУ 2 необходима для регистрации сложных сигналов, в большинстве своем имеющих широкий спектр частот. Кроме этого РПУ 2 обеспечивает подключение опорной антенны (n=0) вместо всех антенн решетки для периодической калибровки каналов по внешнему источнику сигнала с целью устранения их амплитудно-фазовой неидентичности. Возможна калибровка по внутреннему источнику сигнала. При этом может быть использован генератор шума, выход которого также может подключаться вместо всех антенн для периодической калибровки каналов.
Калибровка необходима в связи с тем, что нахождение пеленгов по реальной части синтезированной диаграммы направленности требует при его реализации выполнения двух условий:
- должны быть известны точные (с точностью до долей минимальной длины волны рабочего диапазона частот) координаты антенных элементов решетки относительно опорного элемента;
- должны быть учтены набеги фаз в фидерах, если они различаются электрической длиной, и неидентичность и изменение во времени фазочастотных характеристик приемных трактов применяемых РПУ.
Первое из этих условий легко выполняется путем простых измерений геометрии решетки. Второе условие может быть выполнено выравниванием характеристик фидеров и трактов на этапе изготовления устройства или путем специальных калибровочных процедур по специальному внутреннему или внешнему источнику сигнала в процессе его функционирования, что и реализовано в предлагаемом устройстве.
Минимальное число каналов устройства 2 равно двум. В этом случае один из каналов РПУ 2 постоянно подключен к опорной антенне (n=0), a второй канал последовательно во времени подключается к каждой из N антенн решетки. При этом реализуется более экономичный с точки зрения требуемого объема аппаратуры, но менее информативный метод последовательного синтеза углового спектра.
Блок ДПФ 4 является многопроцессорным и обеспечивает параллельную обработку сигналов, принимаемых опорной антенной (n=0) и всеми N антеннами решетки.
Радиомодемы 5 и 8 совместно с линиями связи 6 обеспечивают обмен информацией между станциями и ЦВ 7.
Работает устройство, реализующее способ многопозиционного определения местоположения ДКМВ передатчиков, следующим образом.
Сигналы пеленгуемых передатчиков поступают на антенные системы 1 всех станций.
На каждой станции с помощью РПУ 2 когерентно принимают временные сигналы xn(t), где n - номер антенного элемента, для всех баз, образованных опорной (n=0) и всеми входящими в решетку антеннами (n=1...N).
С помощью АЦП 3 принятые РПУ 2 сигналы хn(t) синхронно преобразуются на всех станциях в цифровые сигналы xn(z), где z - номер временного отсчета сигнала, и регистрируются в блоке ДПФ 4.
На каждой станции в блоке ДПФ 4 из цифровых сигналов восстанавливают поток импульсных сигналов единичной амплитуды, описывающий состояния излучения и паузы в излучении передатчиков на частоте приема, и соответствующие каждому импульсу азимутальный и угломестный пеленги. Восстановление возможно различными способами, например [3]. При этом выполняются следующие операции:
- восстанавливают комплексные спектры сигналов каждой антенны  где Ft{...} - оператор ДПФ по времени, а f - номер частотной дискреты;
где Ft{...} - оператор ДПФ по времени, а f - номер частотной дискреты;
- сравнением спектра мощности  сигнала опорной антенны с порогом обнаружения выбирают f-е дискрета, в которых обнаружен входной сигнал, то есть определяют среднюю частоту
сигнала опорной антенны с порогом обнаружения выбирают f-е дискрета, в которых обнаружен входной сигнал, то есть определяют среднюю частоту  и полосу δf частот, реально занимаемую спектром входного сигнала;
и полосу δf частот, реально занимаемую спектром входного сигнала;
- используя цифровой фильтр с полосой пропускания, равной найденному значению ширины спектра δf, из цифрового сигнала опорной антенны x0(z) выделяют сигнал 
- демодулируют сигнал  с помощью программно реализуемого амплитудного детектора
с помощью программно реализуемого амплитудного детектора  где k=1...K - текущий номер станции;
где k=1...K - текущий номер станции;
- преобразуют сигналы  посредством сравнения с порогом U0 в поток импульсных сигналов единичной амплитуды
посредством сравнения с порогом U0 в поток импульсных сигналов единичной амплитуды  Порог выбирают исходя из минимизации вероятности пропуска сигнала. Поток импульсных сигналов
Порог выбирают исходя из минимизации вероятности пропуска сигнала. Поток импульсных сигналов  описывает поток излучений на частоте приема
описывает поток излучений на частоте приема  без привязки к конкретному передатчику. Импульс потока сигналов соответствует наличию излучения на частоте
без привязки к конкретному передатчику. Импульс потока сигналов соответствует наличию излучения на частоте  а пауза потока - отсутствию излучения.
а пауза потока - отсутствию излучения.
На фиг.2 в качестве примера приведены потоки  (фиг.2,а) и
(фиг.2,а) и  (фиг.2,б), формируемые на первой приемной станции двухпозиционной системы;
(фиг.2,б), формируемые на первой приемной станции двухпозиционной системы;
- для привязки каждого импульса потока излучений к конкретному передатчику определяют двумерный пеленг излучения (по азимуту и углу места) на частоте в интервале существования импульса.
Для чего:
- получают комплексные амплитуды сигнала n-й антенны путем свертки комплексно-сопряженных спектров опорной и остальных антенн  в найденной полосе δf частот;
в найденной полосе δf частот;
- определяют азимутальный α0 и угломестный β0 пеленги по максимуму реальной части двумерного комплексного углового спектра 
где dn=(m,h) - диаграмма направленности n-й антенны, m=0...М - 1 - текущий номер узла сетки по азимуту, М - число узлов по азимуту, h=0...Н - 1 - текущий номер узла сетки наведения решетки по углу места, Н - число узлов по углу места, а  - модельная фазирующая функция, зависящая от конфигурации антенной решетки;
- модельная фазирующая функция, зависящая от конфигурации антенной решетки;
- выделяя группы импульсов с совпадающими двумерными пеленгами на частоте приема  преобразуют восстановленный поток импульсных сигналов в потоки отдельных передатчиков
преобразуют восстановленный поток импульсных сигналов в потоки отдельных передатчиков  отличающиеся электронными адресами (частота , азимут α, угол места β) и описывающие состояния излучения и паузы в излучении каждого передатчика.
отличающиеся электронными адресами (частота , азимут α, угол места β) и описывающие состояния излучения и паузы в излучении каждого передатчика.
Из фиг.2 следует, что сформированный на первой станции поток (фиг.2,б) преобразовался в два потока  (фиг.2,в) и
(фиг.2,в) и  (фиг.2,г), совпадающие по частоте, но отличающиеся пеленгами;
(фиг.2,г), совпадающие по частоте, но отличающиеся пеленгами;
- для каждого потока  сигналов, используя его адрес (f, α, β), моделируют в запеленгованных направлениях траекторию обратного многоскачкового распространения радиосигнала из точки приема (координаты точки приема совпадают с координатами соответствующей приемной станции) через ионосферу и восстанавливают координаты точек прихода модельной траектории на поверхность Земли
сигналов, используя его адрес (f, α, β), моделируют в запеленгованных направлениях траекторию обратного многоскачкового распространения радиосигнала из точки приема (координаты точки приема совпадают с координатами соответствующей приемной станции) через ионосферу и восстанавливают координаты точек прихода модельной траектории на поверхность Земли  где i - номер скачка сигнала после отражения от ионосферы,
где i - номер скачка сигнала после отражения от ионосферы,  - сферические координаты точки на поверхности Земли, причем ϕ отсчитывается от нулевого меридиана, а θ от оси, проходящей из центра Земли через географический север. Найденные точки рассматривают как предполагаемые точки излучения радиосигнала отдельного передатчика.
- сферические координаты точки на поверхности Земли, причем ϕ отсчитывается от нулевого меридиана, а θ от оси, проходящей из центра Земли через географический север. Найденные точки рассматривают как предполагаемые точки излучения радиосигнала отдельного передатчика.
Фиг.3 иллюстрирует в качестве примера модельные траектории многоскачкового распространения радиосигнала в системе определения местоположения с использованием двух приемных станций (пеленгаторов-дальномеров). Азимутальные пеленги на РПД 1 и РПД 2, полученные на каждой их приемных станций (ПС 1 и ПС 2), обозначены через α1 и α2 соответственно. Угломестные пеленги β1 и β2 с целью упрощения здесь и далее не показаны. Координаты  точек прихода модельной траектории на поверхность Земли изображены только для трехскачковых траекторий, восстановленных на первой приемной станции (ПС 1).
точек прихода модельной траектории на поверхность Земли изображены только для трехскачковых траекторий, восстановленных на первой приемной станции (ПС 1).
При этом выполняют следующие действия:
1. С привязкой к частоте и временному интервалу приема (время, месяц, год) формируют модель ионосферы с использованием Международной справочной модели ионосферы IRI-2001 [4]. В результате вычисляют и запоминают пространственное распределение квадрата отношения плазменной частоты электронов fp=fp(ϕ,θ,r) в ионосфере к рабочей частоте принимаемого сигнала, которое необходимо для вычисления показателя преломления изотропной плазмы μ=μ(ϕ,θ,r):
Для ускорения процедуры вычислений плазменная частота электронов fp в ионосфере прогнозируется на трехмерной пространственной сетке и аппроксимируется кубической сплайн-функцией. Шаг пространственной сетки по координатам на земной поверхности не превышает 500 км, а по вертикальной координате составляет 2,5 км. После процедуры аппроксимации запоминают коэффициенты аппроксимирующей сплайн-функции в узлах пространственной сетки.
процедуры вычислений плазменная частота электронов fp в ионосфере прогнозируется на трехмерной пространственной сетке и аппроксимируется кубической сплайн-функцией. Шаг пространственной сетки по координатам на земной поверхности не превышает 500 км, а по вертикальной координате составляет 2,5 км. После процедуры аппроксимации запоминают коэффициенты аппроксимирующей сплайн-функции в узлах пространственной сетки.
2. Генерируют идеальные сигналы обратного излучения в измеренных направлениях прихода лучей. Идеальный сигнал описывается единичным волновым вектором  и рабочей частотой . Компоненты единичного вектора определяются по измеренному азимутальному α и угломестному β пеленгам луча и в локальной системе координат (начало координат совпадает с точкой расположения пеленгатора (ϕ0,θ0,r0), ось у направлена на север, ось х - на восток, ось z - вертикально вверх) имеют вид 0={cos β sin α, cos β cos α, sin β}. Переход от локальной системы координат к глобальной декартовой правой системе координат (начало координат связано с центром Земли, ось z проходит через географический север, ось х - через нулевой меридиан) для компонент вектора осуществляется с помощью матрицы преобразования А:
и рабочей частотой . Компоненты единичного вектора определяются по измеренному азимутальному α и угломестному β пеленгам луча и в локальной системе координат (начало координат совпадает с точкой расположения пеленгатора (ϕ0,θ0,r0), ось у направлена на север, ось х - на восток, ось z - вертикально вверх) имеют вид 0={cos β sin α, cos β cos α, sin β}. Переход от локальной системы координат к глобальной декартовой правой системе координат (начало координат связано с центром Земли, ось z проходит через географический север, ось х - через нулевой меридиан) для компонент вектора осуществляется с помощью матрицы преобразования А:
где в качестве сферических координат ϕ и θ подставляются координаты пеленгатора ϕ0,θ0.
3. Формируют траектории обратного многоскачкового распространения идеальных сигналов каждого луча в ионосфере. Для этого находят начальные значения сферических координат ϕ,θ,r луча, которые полагаются равными координатам точки входа луча в ионосферу ϕ1, θ1, r1, вычисляемым по формулам:

где x1x, x1y, x1z - элементы вектора  декартовых координат точки входа луча в ионосферу:
декартовых координат точки входа луча в ионосферу:

r0 - радиус Земли, h0 - начальная высота ионосферы,  - декартовые координаты точки излучения идеального сигнала с поверхности Земли в глобальной декартовой правой системе координат (начало координат связано с центром Земли, ось z проходит через географический север, ось х - через нулевой меридиан). Для первого скачка (i=1) вектор
- декартовые координаты точки излучения идеального сигнала с поверхности Земли в глобальной декартовой правой системе координат (начало координат связано с центром Земли, ось z проходит через географический север, ось х - через нулевой меридиан). Для первого скачка (i=1) вектор  вычисляется по координатам пеленгатора:
вычисляется по координатам пеленгатора:

Начальное значение волнового вектора  идеального сигнала на входе в ионосферу определяется по вектору
идеального сигнала на входе в ионосферу определяется по вектору  с использованием унитарной матрицы преобразования В глобальной системы координат к сферической:
с использованием унитарной матрицы преобразования В глобальной системы координат к сферической:

где в качестве сферических координат ϕ и θ подставляются значения ϕ1,θ1.
Для построения лучевой траектории идеального сигнала численно решается задача Коши для системы дифференциальных уравнений:


где kϕ,kθ,kr - значения элементов волнового вектора  идеального сигнала в ионосфере, ϕ, θ, r - координаты луча.
идеального сигнала в ионосфере, ϕ, θ, r - координаты луча.
4. Находят вектор волновой нормали на выходе из ионосферы  сферические ϕ2,θ2,r2 и глобальные декартовые координаты точки выхода из ионосферы
сферические ϕ2,θ2,r2 и глобальные декартовые координаты точки выхода из ионосферы  лучаидеального сигнала. В качестве значений сферических координат ϕ2,θ2,r2 и волнового вектора
лучаидеального сигнала. В качестве значений сферических координат ϕ2,θ2,r2 и волнового вектора  выбирается решение задачи Коши, полученное на предыдущем этапе, в точке выхода лучевой траектории из ионосферы.
выбирается решение задачи Коши, полученное на предыдущем этапе, в точке выхода лучевой траектории из ионосферы.
5. Находят сферические координаты прихода луча идеального сигнала на поверхность Земли (для первого скачка i=1):
где х3x,х3y,х3z - элементы вектора  декартовых координат точки прихода волны на поверхность Земли в глобальной системе координат:
декартовых координат точки прихода волны на поверхность Земли в глобальной системе координат:

Матрицу В вычисляют в точке с координатами ϕ2,θ2.
6. Сферические координаты точки прихода последующих скачков лучевой траектории определяют повторением этапов 1-5 с использованием обновленных векторов 

где матрица А и компоненты вектора  после отражения от поверхности Земли определяются с использованием координат
после отражения от поверхности Земли определяются с использованием координат  и
и  полученных на предыдущем скачке.
полученных на предыдущем скачке.
На фиг.3, в частности для траектории трехскачкового распространения модельного сигнала из точки размещения ПС 1 в направлении α1,β1, точка с координатами  соответствует оценке истинного местоположения первого радиопередатчика (РПД 1), а точки с координатами
соответствует оценке истинного местоположения первого радиопередатчика (РПД 1), а точки с координатами  и
и  являются ложными.
являются ложными.
Таким образом, операции, выполняемые с использованием модельных сигналов, позволяют предварительно оценить координаты предполагаемых точек излучения потоков сигналов с поверхности Земли.
- преобразуют поток  сигналов отдельного передатчика с адресом (частота
сигналов отдельного передатчика с адресом (частота  азимут α, угол места β) в поток
азимут α, угол места β) в поток  с детализированным адресом (частота координаты
с детализированным адресом (частота координаты  , предполагаемых точек излучения).
, предполагаемых точек излучения).
В результате выполнения этой операции бесконечное число возможных точек излучения, описываемое двумерным пеленгом передатчика, сжимается до нескольких предполагаемых точек местоположения передатчика, описываемых координатами  .
.
Таким образом, существенное снижение неопределенности относительно местоположения передатчиков возможно при использовании только одной приемной станции (пеленгатора-дальномера). Один пеленгатор-дальномер обеспечивает решение задачи оценочного (неоднозначного) местоопределения в случаях, когда радиосигнал ДКМВ передатчика энергетически доступен для приема только одной приемной станции. Для устранения неоднозначности измерения координат ДКМВ передатчика, обусловленной многоскачковым механизмом распространения пространственных радиоволн, возможно привлечение дополнительной априорной информации о местонахождении контролируемых передатчиков, например о невозможности размещения передатчика на водной поверхности Земли. Более эффективным способом устранения неоднозначности измерений является комбинирование результатов однопозиционного и многопозиционного измерения координат и использование как минимум двух пространственно разнесенных пеленгаторов-дальномеров.
Используя радиомодемы 5 и 8, по линиям связи 6 с выходов блоков ДПФ 4 всех ПС потоки сигналов  поступают в ЦВ 7.
поступают в ЦВ 7.
В ЦВ 7 выполняются следующие действия:
1. Запоминают потоки сигналов  в ЗУ 9.
в ЗУ 9.
2. Попарно сравнивают в блоке идентификации 10 полученные на разных станциях потоки  с детализированным адресом и отбирают те пары потоков, у которых есть совпадение координат
с детализированным адресом и отбирают те пары потоков, у которых есть совпадение координат  предполагаемых точек излучения сигналов. Другими словами, в блоке 10 решается задача устранения неоднозначности определения координат.
предполагаемых точек излучения сигналов. Другими словами, в блоке 10 решается задача устранения неоднозначности определения координат.
Совпадение координат может быть установлено различными способами. Например, как показано на фиг.3, по принадлежности предполагаемых точек излучения сигналов области перекрытия эллипсов ошибок [5].
3. В блоке обработки 11, используя координаты совпавших
точек и координаты ПС 1 и ПС 2, для каждой отобранной пары потоков строят ортодромы (кратчайшие линии, соединяющие каждую совпавшую точку с соответствующей станцией по земной поверхности) и вычисляют координаты точки пересечения ортодром. Для построения ортодромы используют координаты станции и азимут совпавшей точки, который находится по формуле

Ha фиг.4 в качестве примера показана ортодрома, имеющая азимут αT2 и соединяющая точку  с точкой размещения ПС 1, а также ортодрома с азимутом αT3, соединяющая точку
с точкой размещения ПС 1, а также ортодрома с азимутом αT3, соединяющая точку  c точкой размещения ПС 2.
c точкой размещения ПС 2.
Объединяют координаты точки пересечения ортодром и координаты совпавших точек отобранной пары потоков и определяют координаты точки, которые идентифицируют как координаты передатчика, соответствующие отобранной паре потоков.
При объединении точек может использоваться принцип центра масс или принцип весовой обработки, учитывающий:
- взаимное расположение приемных станций и передатчиков (в примере на фиг.5 более высокий вес должен приписываться координатам, полученным однопозиционным способом, см. фиг.5,а, чем координатам, полученным угломерным способом, см. фиг.5, б);
- уровни принимаемых сигналов (если на одной из станций для принимаемого сигнала отношение сигнал - помеха недостаточно для точного измерения, то ее однопозиционные координаты и ортодрому используют для устранения неоднозначности, а в качестве координат РПД выбирают совпавшую точку, полученную однопозиционным способом на другой станции пары);
- относительную точность измерения однопозиционных и двухпозиционных координат (например, если при моделировании используется только долгосрочный прогноз ионосферы, то обеспечивается высокая точность измерения азимутального пеленга, а достижимая точность измерения дальности до РПД не превышает 15% от дальности. В этом случае больший вес приписывается координатам, полученным пересечением ортодром двух станций. Если используется текущее зондирование ионосферы, то точность измерения дальности до РПД повышается до 3%. В этом случае веса однопозиционных и двухпозиционных измерений могут быть равными).
На фиг.4 показана точка с координатами (ϕРПД1,θРПД1), которые идентифицированы как координаты передатчика. При этом использован упомянутый принцип весовой обработки, когда максимальный вес приписывается точке пересечения ортодром.
В результате использования только двух пеленгаторов-дальномеров обеспечивается:
- повышение вероятности одновременного приема слабых сигналов (при использовании трех и более пеленгаторов эта вероятность существенно ниже) и, как следствие, уменьшение вероятности аномальных ошибок измерений, обусловленных недостаточно высоким отношением сигнал-помеха, характерным при многопозиционном определении координат ДКМВ передатчиков, использующих сигналы с малой спектральной плотностью мощности;
- устранение ошибок определения местоположения, возникающих при боковых смещениях азимутальных пеленгов, благодаря построению ортодром;
- устранение ложных целей, обусловленных неоднозначностью измерений координат множества однотипных ДКМВ передатчиков.
4. В блоке 12 для различных пар потоков сравнивают координаты точек, идентифицированных как координаты передатчика, и при наличии совпадения определяют уточненное местоположение передатчика объединением точек с совпавшими координатами.
Сравнение и объединение возможно различными способами [5, стр.297-298]. Например, для каждой пары точек, идентифицированных как координаты передатчика, находят точку по принципу центра масс. Если расстояние от центра масс до каждой точки меньше заданного порога, то принимается решение об их совпадении и выборе центра масс в качестве уточненного местоположения передатчика. Значение порога выбирается исходя из эксплуатационной точности измерения координат. В результате две сопоставляемые точки заменяются одной точкой центра масс. Используя полученную точку центра масс и оставшиеся точки, ранее идентифицированные как координаты передатчика, процесс уточнения местоположения передатчика продолжается до тех пор, пока находятся точки, удовлетворяющие описанному критерию. После этого выбирается следующая пара точек и процесс повторяется.
5. Для повышения информативности в блоке 13 отображают на электронной карте местности выявленные направления прихода радиосигналов в виде ортодром, соединяющих точки уточненного местоположения передатчиков (фиг.6).
Таким образом, перечисленные действия над сигналами обеспечивают высокую точность измерения местоположения ДКМВ радиопередатчиков при использовании только двух пространственно разнесенных приемных станций. Если радиосигнал ДКМВ передатчика энергетически доступен для приема более чем двум станциям, центральный вычислитель может объединять результаты местоопределения нескольких пар станций и получать уточненное местоположение передатчика, используя различные весовые алгоритмы, учитывающие уровни принимаемых радиосигналов и относительное местоположение различных станций и ДКМВ передатчика.
Повышение точности определения местоположения множества однотипных ДКМВ передатчиков по более широкому классу сигналов, включая сложные сигналы с малой спектральной плотностью мощности, достигается применением комбинации физически различающихся способов (однопозиционного и многопозиционного) оценивания пространственных координат, реализуемой при использовании двух и более приемных позиций, за счет:
- уменьшения вероятности аномальных ошибок, обусловленных недостаточно высоким для точных измерений отношением сигнал - помеха;
- устранения аномальных ошибок определения местоположения, вызванных боковыми смещениями пеленгов из-за наклонов отражающего слоя ионосферы;
- исключения аномальных ошибок определения местоположения множества однотипных ДКМВ передатчиков, обусловленных неоднозначностью измерений.
ИСТОЧНИКИ ИНФОРМАЦИИ
1 FR, патент, 2688892, кл. G 01 S 3/40, 1989 г.
2 US, патент, 5719584, кл. G 01 S 003/02, 1998 г.
3 RU, патент, 2151406, кл. G 01 S 3/14, 2000 г.
4 Bilitza D. Ionospheric Models for Radio Propagation Studies // The review of radio science 1999-2002/ Ed. W. Ross Stone, IEEE Press. 2002. PP. 625-679.
5 Ширман Я.Д., Манжос В.Н. Теория и техника обработки радиолокационной информации на фоне помех. - М.: Радио и связь, 1981. - 416 с.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОДНОПОЗИЦИОННОГО ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ДКМВ ПЕРЕДАТЧИКОВ | 2004 |
|
RU2285934C2 |
| СПОСОБ РАДИОКОНТРОЛЯ | 2004 |
|
RU2287169C2 |
| СПОСОБ ПОИСКА ДЕКАМЕТРОВЫХ ПЕРЕДАТЧИКОВ | 2005 |
|
RU2302646C1 |
| ОДНОЭТАПНЫЙ МЕТОД ПЕЛЕНГОВАНИЯ ИСТОЧНИКОВ ИЗЛУЧЕНИЯ В ДКМВ ДИАПАЗОНЕ С ПРИМЕНЕНИЕМ ФАЗИРОВАННОЙ АНТЕННОЙ РЕШЕТКИ, СОСТОЯЩЕЙ ИЗ ВЗАИМНО ОРТОГОНАЛЬНЫХ СИММЕТРИЧНЫХ ГОРИЗОНТАЛЬНЫХ ВИБРАТОРОВ | 2016 |
|
RU2614035C1 |
| СПОСОБ НАВИГАЦИИ ЛЕТАТЕЛЬНОГО АППАРАТА С ИСПОЛЬЗОВАНИЕМ ВЫСОКОТОЧНОГО ОДНОЭТАПНОГО ПЕЛЕНГАТОРА И АДРЕСНО-ОТВЕТНОЙ ПАКЕТНОЙ ЦИФРОВОЙ РАДИОЛИНИИ В ДКМВ ДИАПАЗОНЕ | 2016 |
|
RU2613369C1 |
| СПОСОБ КАЛИБРОВКИ КОМПЬЮТЕРНО-ИНТЕРФЕРОМЕТРИЧЕСКИХ СИСТЕМ НА ПОДВИЖНЫХ ПЛАТФОРМАХ | 2005 |
|
RU2284043C1 |
| Способ однопозиционного определения координат источников радиоизлучений коротковолнового диапазона радиоволн при ионосферном распространении | 2019 |
|
RU2713188C1 |
| Система пассивной локации для определения координат летательного аппарата в ближней зоне аэродрома и на этапе захода на посадку с резервным каналом определения дальности | 2016 |
|
RU2633380C1 |
| СИСТЕМА РАДИОСВЯЗИ С ПОДВИЖНЫМИ ОБЪЕКТАМИ | 2012 |
|
RU2516704C2 |
| СПОСОБ КАЛИБРОВКИ РАДИОПЕЛЕНГАТОРА-ДАЛЬНОМЕРА | 2005 |
|
RU2309425C2 |
Изобретение относится к радиотехнике и предназначено для пассивного определения местоположения объектов по излучениям их ДКМВ передатчиков с использованием двух или более приемных станций (пеленгаторов-дальномеров). Техническим результатом изобретения является повышение точности определения местоположения множества однотипных ДКМВ передатчиков по более широкому классу сигналов, включая сложные сигналы с малой спектральной плотностью мощности. Способ основан на использовании дополнительной информации о закономерностях ионосферного распространения сигналов ДКМВ. Эта информация учитывается на каждой приемной станции при определении предполагаемых координат объектов однопозиционным способом с использованием модели ионосферы. В центральном вычислителе, связанном со всеми станциями, путем сопоставления результатов физически различающихся способов оценивания пространственных координат (однопозиционного и многопозиционного) устраняется неопределенность отождествления результатов измерений и однозначно определяется местоположение объектов при использовании двух и более станций, что приводит к достижению технического результата. 6 ил.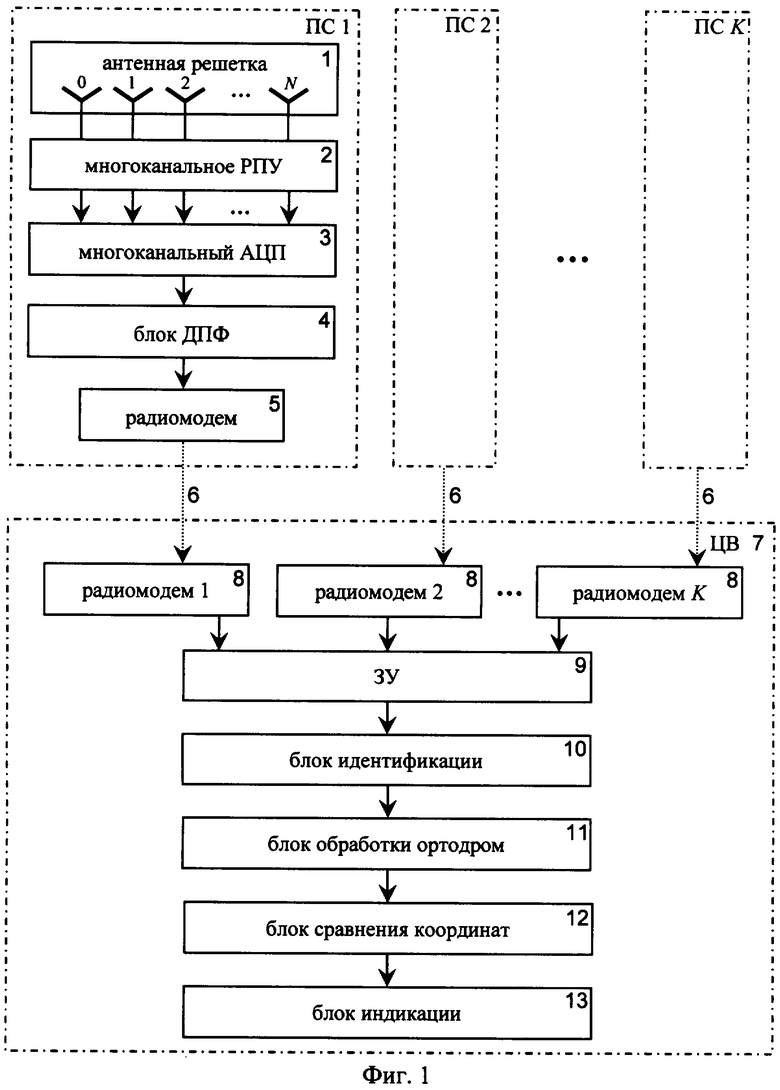
Способ многопозиционного определения местоположения объектов по излучениям их декаметровых передатчиков, включающий прием и синхронное преобразование принятых радиосигналов в цифровые сигналы на нескольких приемных станциях, отличающийся тем, что цифровые сигналы преобразуют в поток импульсных сигналов, описывающий состояния излучения и паузы в излучении передатчиков на частоте приема, и азимутальный и угломестный пеленги, соответствующие каждому импульсу, преобразуют поток импульсных сигналов в потоки отдельных передатчиков, отличающиеся электронными адресами (частота, азимут, угол места), для каждого адреса моделируют траекторию обратного многоскачкового распространения радиосигнала из точки приема через ионосферу и определяют координаты точек прихода сигнала модельной траектории на поверхность Земли после отражения от ионосферы, рассматривают их как предполагаемые точки излучения радиосигнала отдельного передатчика, преобразуют поток сигналов отдельного передатчика с адресом (частота, азимут, угол места) в поток с детализированным адресом (частота, координаты возможных точек излучения), а в центральном вычислителе, связанном со всеми станциями, попарно сравнивают полученные на разных станциях потоки с детализированным адресом и отбирают те пары потоков, у которых есть совпадение координат предполагаемых точек излучения сигналов, для каждой отобранной пары потоков строят ортодромы - кратчайшие линии, соединяющие каждую совпавшую точку с соответствующей станцией по Земной поверхности, и вычисляют координаты точки пересечения ортодром, сравнивают координаты точки пересечения ортодром и координаты совпавших точек отобранной пары потоков и при наличии совпадения точек выполняют их объединение и определяют координаты точки, которые идентифицируют как координаты передатчика, соответствующие отобранной паре потоков, для различных пар потоков сравнивают координаты точек, иденифицированных как координаты передатчика, и при наличии совпадения определяют уточненное местоположение передатчика объединением точек с совпавшими координатами.
| US 5719584 А, 17.02.1998 | |||
| СПОСОБ ОБНАРУЖЕНИЯ И ОПРЕДЕЛЕНИЯ ДВУМЕРНОГО ПЕЛЕНГА И ЧАСТОТЫ ИСТОЧНИКОВ РАДИОИЗЛУЧЕНИЯ | 2000 |
|
RU2190236C2 |
| RU 93030955 А, 27.09.1995 | |||
| СПОСОБ МЕСТООПРЕДЕЛЕНИЯ РАДИОИЗЛУЧАТЕЛЕЙ | 1993 |
|
RU2072524C1 |
| СПОСОБ МЕСТООПРЕДЕЛЕНИЯ ИСТОЧНИКОВ РАДИОИЗЛУЧЕНИЯ | 1999 |
|
RU2154281C1 |
| US 4641143, 21.04.1981. | |||

