Изобретение относится к радиотехнике и может быть использовано в системах загоризонтного обнаружения и определения местоположения объектов по радиоизлучениям их декаметровых (ДКМВ) передатчиков при использовании одной приемной станции. Изобретение применимо в стационарных и мобильных радиопеленгаторах-дальномерах, в загоризонтных радиолокаторах и в других системах, основанных на приеме поверхностных однолучевых и ионосферных многолучевых сигналов.
Признано, что основополагающей процедурой обеспечения потенциально достижимых точностей пеленгования является калибровка, то есть последовательность операций формирования калибровочной базы данных. Калибровочные данные описывают комплексные диаграммы (амплитуды и фазы) антенн при облучении антенной решетки приемной системы на множестве частот, поляризаций, азимутов и углов места. Калибровочные данные могут применяться при реализации корреляционных алгоритмов оценки пространственного спектра, максимумы которого описывают углы прихода сигнала, или использоваться для вычисления поправочных коэффициентов, обеспечивающих коррекцию выходного сигнала элементов решетки в процессе формирования фазированного луча.
Основным условием высокой точности функционирования пеленгатора-дальномера диапазона ДКМВ является высокое качество двухсегментной базы калибровочных данных, включающей сегмент поверхностных волн и сегмент ионосферных волн. На практике, несмотря на использование современных технологий формирования базы калибровочных данных, основанных на комбинации измерений, выполняемых на реальном пеленгаторе и его модели, возникают проблемы получения предельно достижимых характеристик систем, размещаемых в стационарных условиях или на подвижных платформах (автомобилях, самолетах, кораблях и т.д.).
Известен способ калибровки радиопеленгатора-дальномера [1], включающий:
- облучение антенной решетки пеленгатора сигналом с вертикальной поляризацией на множестве калибровочных частот и азимутальных калибровочных направлений;
- прием сигнала каждым каналом антенной решетки;
- измерение относительных амплитуд и фаз принятых сигналов;
- запись измеренных амплитуд и фаз для каждой комбинации приемного канала, калибровочных частот и азимутальных направлений в качестве калибровочных данных.
Данный способ может обеспечить формирование двухсегментной базы калибровочных данных. В то же время реализация данного способа требует применения летно-подъемных средств, что существенно усложняет калибровку и увеличивает затраты на ее проведение, или использования источника облучающего сигнала, размещаемого на поверхности земного геоида, что приводит к большим ошибкам формирования ионосферного сегмента из-за отсутствия у данного способа операций борьбы с интерференционными искажениями принимаемого многолучевого поля.
Известен способ калибровки радиопеленгатора-дальномера [2], свободный от этого недостатка и выбранный в качестве прототипа. Согласно этому способу:
- облучают антенную решетку пеленгатора на множестве калибровочных частот и азимутальных направлений сигналом с вертикальной поляризацией, принимают сигнал в зоне поверхностных волн каждым каналом антенной решетки, измеряют относительные фазы и амплитуды сигналов и регистрируют их в качестве сегмента калибровочных данных поверхностных волн;
- облучают модель антенной решетки пеленгатора на множестве калибровочных частот и азимутальных калибровочных направлений модельным сигналом с вертикальной поляризацией, принимают сигнал и регистрируют модельный сегмент калибровочных данных поверхностных волн;
- сопоставляют амплитуды и фазы сигналов реального и модельного сегментов калибровочных данных поверхностных волн и корректируют параметры модели;
- облучают откорректированную модель пеленгатора на множестве калибровочных частот и угломестных направлений модельным сигналом с вертикальной и горизонтальной поляризацией, принимают сигнал и регистрируют модельный сегмент калибровочных данных ионосферных волн;
- формируют двухсегментную базу калибровочных данных радиопеленгатора объединением сегмента данных поверхностных волн, полученных на реальной платформе, и сегмента данных ионосферных волн, полученных на модели платформы.
Данный способ не требует применения летно-подъемных средств и обеспечивает калибровку при размещении источника облучения на поверхности земного геоида.
Однако способу-прототипу присущи следующие недостатки:
- недостаточная точность формирования поверхностного сегмента калибровочных данных, что обусловлено низкой помехозащищенностью способа при приеме реального однолучевого калибровочного сигнала на фоне некоррелированных помех, с одной стороны, и высокой загруженностью диапазона ДКМВ, с другой;
- низкая точность формирования ионосферного сегмента калибровочных данных из-за неизбежных ошибок при его получении по модельным данным, что обусловлено сложностью и наличием принципиальных физических ограничений создания полностью адекватных моделей (модель элементов антенной решетки, модель многолучевых сигналов нестационарного ионосферного канала, модель объекта, на котором размещен пеленгатор), положенных в основу операций формирования ионосферного сегмента калибровочных данных.
Техническим результатом изобретения является повышение эффективности и точности формирования базы калибровочных данных широкого класса стационарных и мобильных радиопеленгаторов-дальномеров. Повышение эффективности и точности формирования базы калибровочных данных достигается на основе дополнительной информации, получаемой в результате применения облучающего сигнала с расширенным спектром и использования операций его сжатия при формировании калибровочных данных в реальных условиях эксплуатации радиопеленгатора.
Технический результат достигается тем, что в способе калибровки радиопеленгатора-дальномера, включающем облучение антенной решетки пеленгатора на множестве калибровочных частот и азимутальных направлений сигналом с вертикальной поляризацией, согласно изобретению при облучении используют сигнал с расширенным спектром, синхронно и когерентно принимают на частоте калибровки облучающий сигнал каждым каналом антенной решетки, синхронно преобразуют и запоминают принятые каждым каналом сигналы в цифровую форму, из цифровых сигналов выделяют сжатые сигналы отдельных лучей принятого сигнала, по которым формируют для всех комбинаций номеров каналов приема, значений калибровочных частот и азимутально-угломестных направлений базу калибровочных данных по поверхностным и ионосферным волнам.
Возможны частные случаи осуществления способа:
1. При облучении используют импульсный одночастотный псевдослучайный сигнал, а выделение сигналов отдельных лучей и формирование калибровочных данных осуществляют путем формирования и запоминания зависящих от временного сдвига τ комплексных корреляционных функций (КФВ)  между принятым каждой n-й антенной решетки цифровым сигналом и опорным сигналом, синхронизированным с облучающим сигналом, усреднения модулей комплексных КФВ
между принятым каждой n-й антенной решетки цифровым сигналом и опорным сигналом, синхронизированным с облучающим сигналом, усреднения модулей комплексных КФВ  , определения по максимумам усредненной КФВ
, определения по максимумам усредненной КФВ  числа лучей в принятом сигнале и фиксации значения задержки по времени τi каждого i-го луча, идентификации соответствующих отдельному максимуму усредненной КФВ
числа лучей в принятом сигнале и фиксации значения задержки по времени τi каждого i-го луча, идентификации соответствующих отдельному максимуму усредненной КФВ  составляющих комплексных КФВ
составляющих комплексных КФВ  как сжатый по времени сигнал i-го луча, выделения и запоминания в качестве калибровочных данных значений идентифицированных составляющих комплексных КФВ , вычисления группового пути Li=τiс и угла места
как сжатый по времени сигнал i-го луча, выделения и запоминания в качестве калибровочных данных значений идентифицированных составляющих комплексных КФВ , вычисления группового пути Li=τiс и угла места  где с - скорость распространения света, где r - радиус Земли, D - расстояние между источником облучающего сигнала и радиопеленгатором, а также, используя координаты источника облучающего сигнала и радиопеленгатора, азимута αi прихода сигнала i-го луча, запоминания значений азимута αi, угла места βi и частоты калибровки f для идентификации в базе калибровочных данных запомненных составляющих комплексных КФВ .
где с - скорость распространения света, где r - радиус Земли, D - расстояние между источником облучающего сигнала и радиопеленгатором, а также, используя координаты источника облучающего сигнала и радиопеленгатора, азимута αi прихода сигнала i-го луча, запоминания значений азимута αi, угла места βi и частоты калибровки f для идентификации в базе калибровочных данных запомненных составляющих комплексных КФВ .
Это повышает выходное отношение сигнал/помеха и, как следствие, обеспечивает повышение точности калибровки в условиях однолучевого (при формировании сегмента поверхностных волн) и многолучевого (при формировании сегмента ионосферных волн) распространения радиоволн.
2. При облучении также используют непрерывный линейно-частотно-модулированный (ЛЧМ) радиосигнал, а выделение сигналов отдельных лучей и формирование калибровочных данных осуществляют путем формирования и запоминания зависящих от частотного сдвига ω комплексных корреляционных функций (КФЧ)  между принятым каждой n-й антенной решетки цифровым сигналом и опорным сигналом, синхронизированным с облучающим сигналом, усреднения модулей комплексных КФЧ
между принятым каждой n-й антенной решетки цифровым сигналом и опорным сигналом, синхронизированным с облучающим сигналом, усреднения модулей комплексных КФЧ  определения по максимумам усредненной КФЧ
определения по максимумам усредненной КФЧ  числа лучей в принятом сигнале и фиксации значения частотного сдвига ωi каждого i-го луча, идентификации соответствующих отдельному максимуму усредненной КФЧ
числа лучей в принятом сигнале и фиксации значения частотного сдвига ωi каждого i-го луча, идентификации соответствующих отдельному максимуму усредненной КФЧ  составляющих комплексных КФЧ
составляющих комплексных КФЧ  как сжатый по спектру сигнал i-го луча, выделения и запоминания в качестве калибровочных данных значений идентифицированных составляющих комплексных КФЧ , вычисления времени задержки сигнала луча τi=ωi/ν, где ν - скорость изменения частоты облучающего сигнала, а также группового пути Li и угла места βi и азимута αi прихода сигнала i-го луча, запоминания значений азимута αi, угла места βi и частоты калибровки f для идентификации в базе калибровочных данных запомненных составляющих комплексных КФЧ .
как сжатый по спектру сигнал i-го луча, выделения и запоминания в качестве калибровочных данных значений идентифицированных составляющих комплексных КФЧ , вычисления времени задержки сигнала луча τi=ωi/ν, где ν - скорость изменения частоты облучающего сигнала, а также группового пути Li и угла места βi и азимута αi прихода сигнала i-го луча, запоминания значений азимута αi, угла места βi и частоты калибровки f для идентификации в базе калибровочных данных запомненных составляющих комплексных КФЧ .
Это также повышает точность калибровки благодаря дополнительному приросту выходного отношения сигнал/помеха за счет использования синхронизированной по времени перестройки в широкой полосе частот узкополосного облучающего сигнала и узкой полосы приема в радиопеленгаторе. Кроме того, это обеспечивает возможность получения калибровочной информации на любой частоте за счет непрерывности облучающего сигнала по частоте и времени.
Отметим, что применение в предложенном способе операций усреднения модулей комплексных КФВ и КФЧ, полученных по сигналам отдельных антенн решетки, существенно (пропорционально корню из числа антенн решетки N, которое на практике изменяется от 5 до 64 и более) повышает точность определения числа лучей, значений задержек τi и, как следствие, углов места βi каждого i-го луча. Такое усреднение возможно в связи с тем, что задержка сигнала между двумя максимально удаленными, как правило не более чем 300 м, антеннами решетки пренебрежимо мала по сравнению с задержкой между лучами.
Предложенный способ, в отличие от прототипа, не использует модельные данные, ограничивающие потенциально достижимую точность калибровки, и основан на высокоэффективном преобразовании реальных однолучевых и многолучевых сигналов, принимаемых реальным радиопеленгатором. В условиях однолучевого распространения радиоволн повышение точности достигается за счет существенного повышения (в 104-105 раз в зависимости от базы облучающего сигнала) выходного отношения сигнал/помеха путем сжатия облучающего сигнала при приеме. В условиях многолучевого распространения радиоволн повышение точности калибровки еще существеннее благодаря дополнительному устранению взаимных интерференционных помех между сигналами отдельных лучей за счет повышения угловой разрешающей способности при приеме.
Таким образом, за счет дополнительной информации, получаемой в результате применения сигнала с расширенным спектром и операций его сжатия при калибровке реального пеленгатора, удается решить поставленную задачу с достижением указанного технического результата.
Предложенный способ может быть реализован при калибровке стационарных и мобильных радиопеленгаторов. В первом случае источник облучающего сигнала перемещается вокруг стационарного радиопеленгатора, а во втором случае используется специально организованное или естественное перемещение мобильного радиопеленгатора.
Рассмотрим указанные преимущества, а также особенности настоящего изобретения на примере калибровки радиопеленгатора-дальномера, установленного на корабле. В ходе естественного перемещения корабля в каждой точке пространства будут получены данные калибровки только по одному азимутальному направлению. Более эффективным с точки зрения сокращения времени формирования базы калибровочных данных является вариант калибровки в режиме циркуляции корабля по азимуту в выбранной точке калибровки на линии курса корабля, который используется при дальнейшем описании устройства.
Операции способа поясняются чертежами:
Фиг.1. Структурная схема устройства, реализующего предложенный способ калибровки.
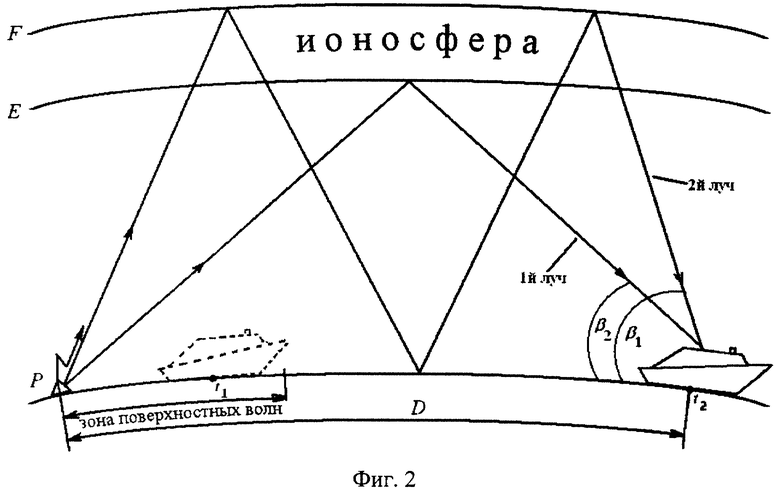
Фиг.2. Схема калибровки корабельного радиопеленгатора-дальномера.
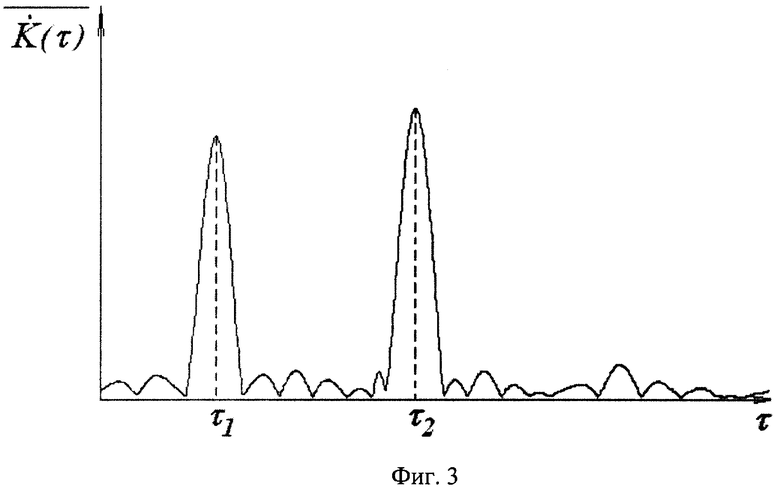
Фиг.3. Усредненная корреляционная функция, зависящая от временного сдвига, для случая двухлучевого ионосферного сигнала.
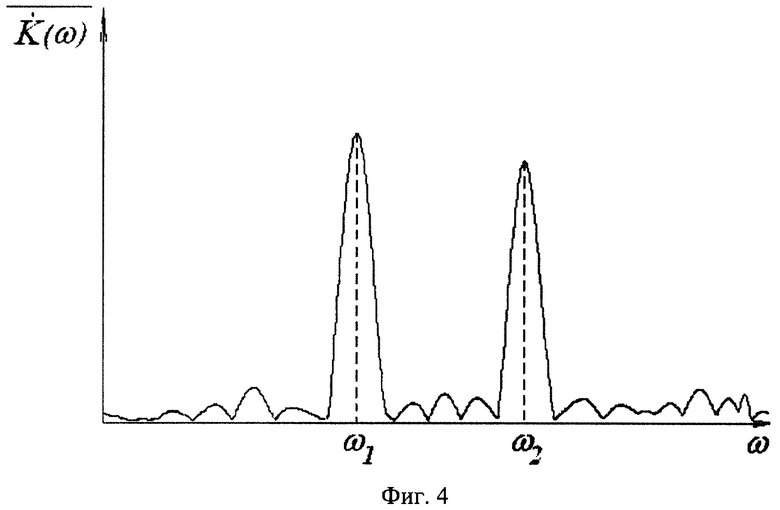
Фиг.4. Усредненная корреляционная функция, зависящая от частотного сдвига, для случая двухлучевого ионосферного сигнала.
Устройство, в котором реализуется предложенный способ, содержит последовательно соединенные антенную решетку из N антенных элементов 1, N-канальное радиоприемное устройство (РПУ) 2, N - канальный аналого-цифровой преобразователь (АЦП) 3, формирователь базы калибровочных данных 4, а также радиопередатчик 5, соединенный со вторыми входами преобразователя частоты 2 и АЦП 3. Второй вход формирователя базы калибровочных данных 4 предназначен для получения информации о собственных координатах и курсе корабля, на котором установлен радиопеленгатор, а выход формирователя 4 - для выдачи команд в систему управления курсом корабля.
Элементы решетки 1 представляют собой рамочные антенны, нерегулярно распределенные по корпусу корабля.
РПУ 2 выполнено с общим гетеродином и с полосой пропускания каждого канала, соответствующей мгновенной ширине спектра сигнала радиопередатчика. Общий гетеродин обеспечивает многоканальный когерентный прием сигналов на частоте калибровки, что является основным условием интерферометрической (топографической) регистрации комплексных сигналов передатчика. Кроме того, частота и фаза гетеродина синхронизирована с параметрами сигнала радиопередатчика, что является основным условием возможности сжатия принятого сложного сигнала во времени или по частоте. Возможен вариант построения РПУ 2 по принципу приемника прямого усиления. При этом каналы РПУ 2 выполняют функцию предварительной фильтрации принимаемого сигнала по частоте и функцию усиления отфильтрованного сигнала до уровня согласованного с входным диапазоном уровней АЦП, окончательная фильтрация выполняется в цифровой форме в формирователе базы 4.
Формирователь базы 4 представляет собой многопроцессорное вычислительное устройство, что повышает быстродействие при преобразовании сигналов принимаемых N-элементной антенной решеткой.
Радиопередатчик 5 выполнен в стационарном варианте. Возможно применение мобильного варианта радиопередатчика 5, что может придать дополнительную гибкость процессу калибровки. Синхронизация радиопередатчика 5, РПУ 2 и АЦП 3 может быть обеспечена с использованием стандартных приемников системы GPS, а также по радиоканалам спутниковой или ДКМВ связи.
Способ калибровки радиопеленгатора-дальномера осуществляется следующим образом.
Радиопередатчик Р (фиг.2) обеспечивает облучение антенной решетки корабельного пеленгатора на множестве калибровочных частот и азимутальных направлений сигналом с расширенным спектром и вертикальной поляризацией.
Это обеспечивается, например, как отмечалось ранее, фиксацией пространственных координат собственного радиопередатчика Р или выбором любого стационарного радиопередатчика с известными координатами, излучающего требуемый вид сложного сигнала, и циркуляцией корабля в точках t1 или t2 (фиг.2). Отметим, что радиосигнал радиопередатчика Р в точки приема на земном геоиде, находящиеся в зоне поверхностных волн, например в точку t1 (фиг.2), приходит под нулевым углом места (β=0). В точках приема, находящихся в зоне ионосферных волн, например в точке t2 (фиг.2), радиосигнал радиопередатчика Р в 50-70% случаев наблюдается как многолучевой с очень близкими азимутами, но отличающимися углами места (β1>0, β2>0), что открывает возможность одновременного формирования калибровочных данных для нескольких углов места.
Синхронно и когерентно принимается облучающий сигнал на частоте калибровки каждым n-м, n=1...N, каналом антенной решетки. При этом по сигналу синхронизации преобразователь 2 перестраивается на заданную частоту приема. Сигналы радиопередатчика Р, зависящие от времени, принимаются антеннами решетки 1. В РПУ 2 принятый каждой антенной решетки 1 зависящий от времени t сигнал xn(t) когерентно с сигналами других каналов переносится на более низкую частоту.
Синхронно преобразуется с помощью АЦП 3 сформированный в РПУ 2 ансамбль сигналов xn(t) в ансамбль цифровых сигналов xn(z). Цифровые сигналы xn(z) синхронно запоминаются в формирователе 4.
Кроме того, в формирователе 4 из цифровых сигналов выделяются сжатые сигналы отдельных лучей принятого сигнала, по которым формируется для всех комбинаций номеров каналов приема, значений калибровочных частот и азимутально-угломестных направлений база калибровочных данных по поверхностным и ионосферным волнам.
При облучении радиопеленгатора-дальномера импульсным одночастотным псевдослучайным радиосигналом в формирователе 4 производится:
- выделение сигналов отдельных лучей и формирование калибровочных данных путем формирования и запоминания зависящих от временного сдвига τ комплексных корреляционных функций (КФВ) между принятым каждой n-й антенной решетки цифровым сигналом xn(z) и опорным сигналом y0(z), синхронизированным с облучающим сигналом. Комплексная КФВ формируется прямыми вычислениями по формуле  где τ - задержка по времени, Q - длина выборки цифровых сигналов xn(z) и y0(z), * - означает комплексное сопряжение, или, что более эффективно, с применением быстрого алгоритма на основе БПФ,
где τ - задержка по времени, Q - длина выборки цифровых сигналов xn(z) и y0(z), * - означает комплексное сопряжение, или, что более эффективно, с применением быстрого алгоритма на основе БПФ,
- усреднение модулей комплексных КФВ по формуле  ,
,
- определение по максимумам усредненной КФВ числа лучей в принятом сигнале и фиксации значения задержки по времени τi каждого i-го луча.
Пример усредненной КФВ , сформированной для случая двухлучевого ионосферного сигнала, приведен на фиг.3;
- идентификация соответствующих отдельному максимуму усредненной КФВ составляющих комплексных КФВ  как сжатый по времени сигнал i-го луча,
как сжатый по времени сигнал i-го луча,
- выделение и запоминание в качестве калибровочных данных значений идентифицированных составляющих комплексных КФВ ,
- вычисление группового пути Li, угла места βi и азимута αi прихода сигнала i-го луча,
- запоминание значений азимута αi, угла места βi, и частоты калибровки f для идентификации в базе калибровочных данных запомненных составляющих комплексных КФВ .
Если при облучении используют непрерывный ЛЧМ радиосигнал, то в формирователе 4 выделяются сигналы отдельных лучей и формируются калибровочные данные следующим образом:
- формируются и запоминаются зависящие от частотного сдвига ω комплексные корреляционные функции (КФЧ)  между принятым каждой n-й антенной решетки цифровым сигналом хn(z) и опорным сигналом y0(z), синхронизированным с облучающим сигналом,
между принятым каждой n-й антенной решетки цифровым сигналом хn(z) и опорным сигналом y0(z), синхронизированным с облучающим сигналом,
Комплексные КФЧ могут быть более эффективно вычислены с применением быстрого алгоритма на основе БПФ;
- усредняются модули комплексных КФЧ по формуле 
- определяется по максимумам усредненной КФЧ  число лучей в принятом сигнале и фиксируется значение частотного сдвига ωi каждого i-го луча.
число лучей в принятом сигнале и фиксируется значение частотного сдвига ωi каждого i-го луча.
Пример усредненной КФЧ  , сформированной для случая двухлучевого ионосферного сигнала, приведен на фиг.4;
, сформированной для случая двухлучевого ионосферного сигнала, приведен на фиг.4;
- идентифицируются соответствующие отдельным максимумам усредненной КФЧ составляющие комплексных КФЧ  как сжатый по спектру сигнал i-го луча,
как сжатый по спектру сигнал i-го луча,
- выделяются и запоминаются в качестве калибровочных данных значения идентифицированных составляющих комплексных КФЧ  ,
,
- вычисляется время задержки τi, групповой путь Li, угол места βi и азимут αi прихода сигнала i-го луча,
- запоминаются значения азимута αi, угла места βi и частоты калибровки f для идентификации в базе калибровочных данных запомненных составляющих комплексных КФЧ .
Из приведенного описания следует, что устройство, реализующее предложенный способ, обеспечивает прецизионное формирование поверхностного и ионосферного сегментов базы калибровочных данных. Работа устройства базируется на реальных измерениях, получаемых по реальным сигналам поверхностных и ионосферных волн, принимаемым реальной антенной решеткой, размещенной на реальной подвижной платформе.
Таким образом, предложенный способ обеспечивает повышение эффективности и точности формирования базы калибровочных данных широкого класса стационарных и мобильных радиопеленгаторов-дальномеров за счет дополнительной информации, получаемой в результате применения облучающего сигнала с расширенным спектром и использования операций его сжатия при формировании калибровочных данных в реальных условиях эксплуатации радиопеленгатора. Это повысило помехозащищенность в условиях однолучевого (поверхностные волны) распространения радиоволн и открыло возможность прецизионной калибровки в реальных условиях многолучевого (ионосферные волны) распространения радиоволн без применения модельных данных, ограничивающих потенциально достижимую точность калибровки. Кроме того, это обеспечило возможность прецизионного формирования двухсегментной базы калибровочных данных радиопеленгатора с использованием источника облучения, размещаемого на поверхности земного геоида, и тем самым повысило эффективность калибровки за счет полного исключения затрат на создание моделей.
Неоспоримым преимуществом предложенного способа является возможность непрерывной коррекции как поверхностного, так и ионосферного сегментов базы калибровочных данных на протяжении всего жизненного цикла широкого класса стационарных и мобильных радиопеленгаторов-дальномеров.
Источники информации
1. US, патент 4992796, кл. G01S 13/48, 1991 г.
2. US, патент 6720911 В2, кл. G01S 7/40, G01S 13/48, 2004 г.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ КАЛИБРОВКИ ДЕКАМЕТРОВОГО РАДИОПЕЛЕНГАТОРА-ДАЛЬНОМЕРА | 2010 |
|
RU2422846C1 |
| СПОСОБ КАЛИБРОВКИ КОМПЬЮТЕРНО-ИНТЕРФЕРОМЕТРИЧЕСКИХ СИСТЕМ НА ПОДВИЖНЫХ ПЛАТФОРМАХ | 2005 |
|
RU2284043C1 |
| СПОСОБ ОБНАРУЖЕНИЯ И ЛОКАЛИЗАЦИИ ВОЗДУШНЫХ ОБЪЕКТОВ | 2009 |
|
RU2420755C2 |
| СПОСОБ МНОГОПОЗИЦИОННОГО ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ДКМВ ПЕРЕДАТЧИКОВ | 2004 |
|
RU2285935C2 |
| СПОСОБ ПОИСКА ДЕКАМЕТРОВЫХ ПЕРЕДАТЧИКОВ | 2005 |
|
RU2302646C1 |
| СПОСОБ ПОЛЯРИЗАЦИОННО-ЧУВСТВИТЕЛЬНОГО ПЕЛЕНГОВАНИЯ РАДИОСИГНАЛОВ (ВАРИАНТЫ) | 2008 |
|
RU2393498C2 |
| СПОСОБ ОБНАРУЖЕНИЯ И ЛОКАЛИЗАЦИИ ВОЗДУШНЫХ ОБЪЕКТОВ | 2010 |
|
RU2444756C1 |
| ИОНОСФЕРНЫЙ ЗОНД-РАДИОПЕЛЕНГАТОР | 2009 |
|
RU2399062C1 |
| СПОСОБ РАДИОКОНТРОЛЯ | 2004 |
|
RU2287169C2 |
| СПОСОБ ПРОСТРАНСТВЕННОЙ ПОЛЯРИЗАЦИОННО-ЧУВСТВИТЕЛЬНОЙ ЛОКАЛИЗАЦИИ МНОГОЛУЧЕВЫХ РАДИОСИГНАЛОВ | 2008 |
|
RU2385467C1 |
Изобретение относится к радиотехнике и может быть использовано в системах загоризонтного обнаружения и определения местоположения объектов по радиоизлучениям их декаметровых передатчиков при использовании одной приемной станции. Техническим результатом изобретения является повышение эффективности и точности формирования базы калибровочных данных широкого класса стационарных и мобильных радиопеленгаторов-дальномеров. Повышение эффективности и точности формирования базы калибровочных данных достигается на основе дополнительной информации, получаемой в результате применения облучающего сигнала с расширенным спектром и использования операций его сжатия при формировании калибровочных данных в реальных условиях эксплуатации радиопеленгатора. 3 н.п. ф-лы, 4 ил.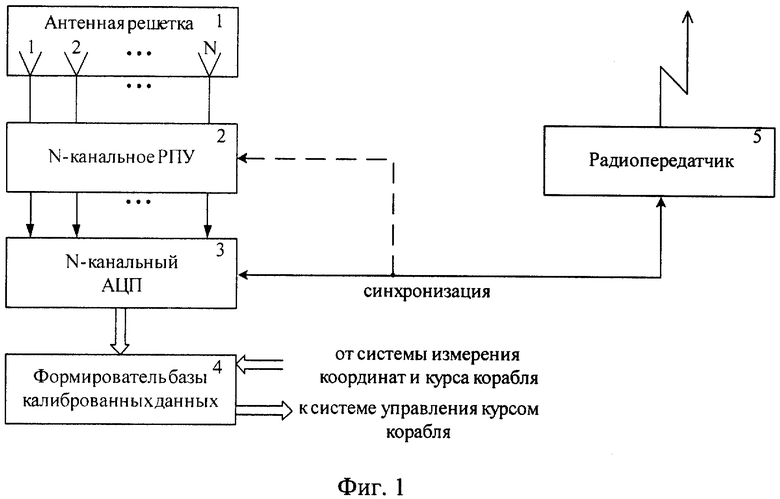
| US 6720911 B2, 19.02.2004 | |||
| СПОСОБ ИЗМЕРЕНИЯ ЭЛЕКТРОФИЗИЧЕСКИХ ПАРАМЕТРОВ ЗОНДИРУЕМОГО МАТЕРИАЛА И РАССТОЯНИЯ ДО НЕГО (ВАРИАНТЫ), УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ И СПОСОБ КАЛИБРОВКИ ЭТОГО УСТРОЙСТВА | 2003 |
|
RU2234688C1 |
| ИМИТАТОР ИСТОЧНИКОВ РАДИОСИГНАЛОВ | 1994 |
|
RU2094915C1 |
| СПОСОБ ИЗМЕРЕНИЯ ДАЛЬНОСТИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1995 |
|
RU2091711C1 |
| US 6775616 B1, 10.08.2004 | |||
| WO 2004003586 A1, 08.01.2004 | |||
| US 2003016161 A1, 23.01.2003. | |||

