Изобретение относится к радиотехнике, радионавигации, а также для использования при исследованиях параметров ионосферы и позволяет повысить точность определения координат источников радиоизлучений коротковолнового (KB) диапазона с одной позиции.
Известен способ по одноточечному местоопределению источников радиоизлучения (ИРИ) после применения "кривых" передачи Смита местоопределения радиоизлучателей (Патент RU №2072524 С1, МПК G01S 3/02 - 27.01.1997). Алгоритм предусматривает измерение углов прихода ионосферной волны в вертикальной и горизонтальной плоскостях, получение параметров ионосферы методом вертикального зондирования (ВЗ), определение приращения медианных значений параметров ионосферы между радиопеленгаторным пунктом и районом отражения радиосигнала, расчет продольного и поперечного наклонов отражающего слоя ионосферы при использовании плоской модели ионосферы в районе отражения радиосигнала и уточнение параметров положения ИРИ, согласно рассчитанных поправок. Недостатком метода является то, что он не учитывает форму профиля электронной концентрации ионосферы. Коррекция по В3-линейная по параметрам без учета пространственно-временных корреляционных зависимостей и ошибок определения параметров методом ВЗ. Использование реперных ИРИ сводилось к коррекции продольных и поперечных градиентов наклона ионосферных параметров в области отражения радиоволны без учета различия частот реперных и пеленгуемых ИРИ.
Известен способ однопунктовой дальнометрии источников электромагнитного излучения (Патент RU №2118836 С1, МПК G01S 13/95, G01S 5/02 - 10.09.1998). Способ основан на измерении принятого полезного сигнала, известным способом определяют задержку ионосферного отражения относительно сигнала земной волны, определяют опорную частоту сигнала, восстанавливают профиль электронной концентрации ионосферы с помощью сигналов фиксированной частоты импульсно-фазовых радиостанций с известными координатами. По полученному профилю электронных концентраций, опорной частоте сигнала и времени задержки ионосферного отражения, используя зависимость времени задержки ионосферного отражения от дальности до источника излучения, определяют величину дальности. Недостатком предложенного способа является его ограниченная пригодность в тех случаях, когда наблюдается одновременно сигналы поверхностных и пространственных волн, и ионосферная (пространственная) волна формируется модом Е (распространение волны при отражении только от слоя Е). Коррекция области Е линейная по сигналам реперных источников.
Метод по способу местоопределения источников радиоизлучения (Патент RU №2154281 С1, МПК G01S 3/02 - 10.08.2000, Бюл. №22) является развитием патента RU №2072524 и предусматривает параболическую аппроксимацию вместо линейной, а для расчета траекторий радиоволн применяет квазипараболическую модель ионосферного слоя. Недостатком метода является также как и для патента RU №2072524, низкая точность коррекции ионосферных данных, не учитываются пространственно-временные корреляционные зависимости и ошибки определения параметров методом ВЗ. Реперные источники не используются.
Традиционным методом определения координат источников радиоизлучений (ИРИ) является триангуляционный метод предполагающий наличие сети пеленгационных пунктов объединенных единой системой управления (Патент RU №2490661 С1, МПК G01S 1/08 - 20.08.2013, Бюл. №23). Он основан на одновременном использовании не менее 2-х КВ пеленгаторов. Для высокой точности местоопределения ИРИ необходим разнос между пунктами пеленгации в несколько сотен километров, что при прохождении радиоволн через ионосферу обуславливает различный характер трасс распространения радиоволн, имеющих свои ошибки измерения пеленга, вплоть до отсутствия приема радиосигнала, что приводит к затруднению и даже невозможности решения задачи определения координат ИРИ. Недостатком данного способа является возможность определения координат только группой из нескольких (минимум двух) пеленгаторов с обязательным наличием системы связи между ними.
Способ однопунктового местоопределения ИРИ (Патент RU №2523650 С2, МПК G01S 5/00 - 0.07.2014 Бюл. №20) заключается в моделировании модов распространения сигналов с сетки дальностей, определение по углам прихода модов фазового набега в антенных элементах (АЭ) круговой антенной решетки (АР). Далее эти фазовые набеги вычитаются из сигнала от АЭ, квадратично детектируются и усредняются по количеству АЭ АР. Пеленг и дальность до ИРИ определяется по минимуму результатов усреднения взвешенному пропорционально числу лучей. Предлагается использовать станцию ВЗ, которая определяет высоты и критические частоты ионосферных слоев или месячные прогнозы. Недостатком данного способа является ограниченная возможность применения, только для односкачковых трасс с углами места более 10 градусов, а также невозможность правильности оценки принимаемого сигнала, о том что он соответствует определенным условиям и как следствие низкая вероятность правильного местоопределения ИРИ.
Наиболее близким по физической и технической сущности к предлагаемому способу является способ однопозиционного местоопределения, включающий в себя прием на заданной частоте многолучевого сигнала передатчика решеткой антенн, синхронное преобразование ансамбля принятых антеннами сигналов в цифровые сигналы и их синхронную регистрацию на заданном временном интервале (Патент RU №2285934 С1, МПК G01S 5/04 - 20.10.2006, Бюл. №29). Согласно изобретению из цифровых сигналов выделяют сигналы отдельных лучей прихода сигнала передатчика и восстанавливают двумерные пеленги каждого луча по известным алгоритмам, формируют модель ионосферы, соответствующую частоте и временному интервалу приема сигнала, и модельные сигналы обратного излучения в измеренных направлениях прихода лучей, определяют траектории обратного многоскачкового распространения модельных сигналов и находят координаты точек их прихода на поверхность Земли, которые идентифицируют как координаты предполагаемых точек излучения сигнала передатчика, находят совпадение полученных точек, совпавшие точки объединяют и находят точку, координаты которой идентифицируют как координаты передатчика. В предложенном способе используется модель IRI-2001 в сочетании с лучевыми расчетами в трехмерно-неоднородной ионосфере. Указывается на возможность коррекции модели IRI-2001 по данным ВЗ и НЗ ионосферы.
Данное изобретение принято за прототип.
Основной его недостаток заключается в том, что точность определения координат ИРИ в значительной мере базируется на применении упрощенного варианта модели ионосферы IRI-2001 и способа ее коррекции, авторы не конкретизируют установки вариантов модели, следовательно используют штатные, что приводит к снижению точностных характеристик критических частот слоя F2 (f0F2) и главное высот максимума слоя F2 (hmF2), а также невозможности правильной оценки появления слоя F1 и спорадического слоя Es, кроме того, не учитывают энергетические параметры лучей и используют упрощенный подход к расчету траекторий распространения радиоволн вблизи точки поворота луча, что в большинстве времен суточно-сезонного цикла приводит к систематическому завышению оценок высот и, следовательно, дальности при лучевых расчетах.
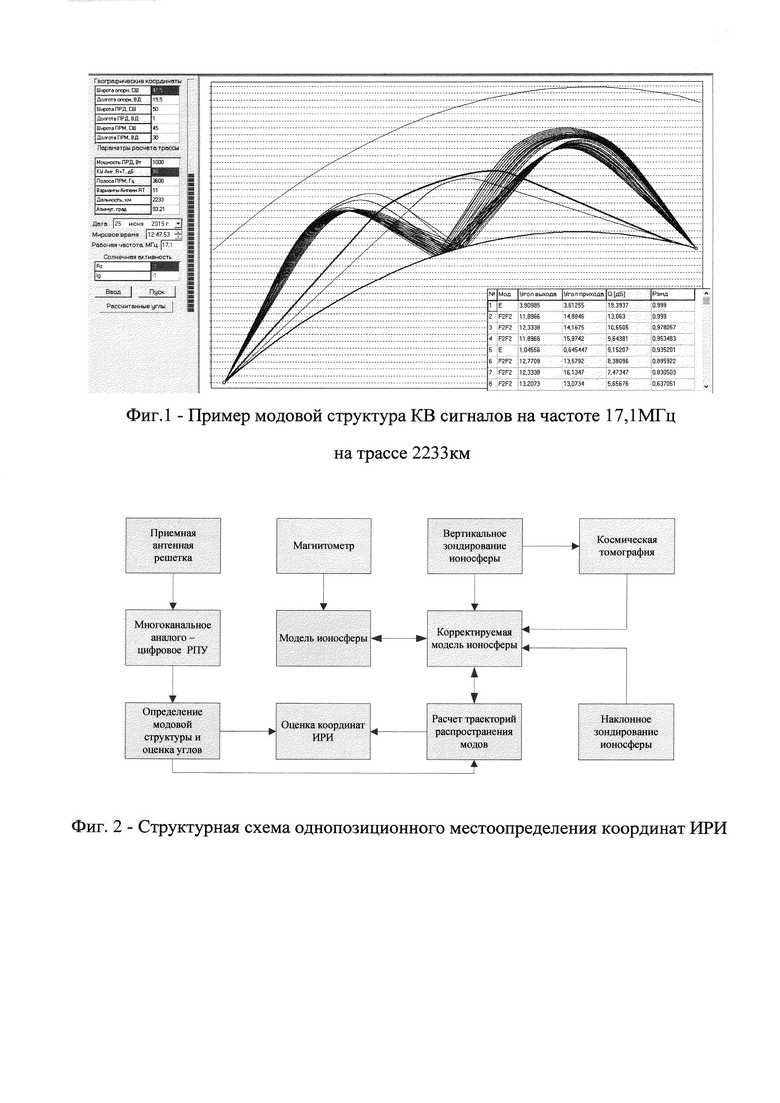
Все известные способы одноточечного местоопределения ИРИ основаны на упрощенных подходах к способам распространения КВ сигналов ионосферными модами и возможности точного описания ионосферной плазмы с помощью той или иной ее коррекции по реперным данным, результатам ВЗ или (и) НЗ. Ни в одном из способов не учитываются энергетические и флуктуационные характеристики распространяющихся сигналов и характеристики аппаратных средств ИРИ и пеленгатора. Пример (Фиг. 1) иллюстрирует, что ни один из предложенных ранее способов не пригоден для решения задачи однопозиционного местоопределения в большинстве ситуаций.
Задачей заявляемого изобретения является повышение точности одноместного определения координат источников радиоизлучений КВ диапазона радиоволн при ионосферном распространении.
Техническим результатом заявленного изобретения является повышение точности однопозиционного местоопределения ИРИ.
Технический результат изобретения достигается за счет единого целевого подхода, включающего обнаружение и прием на известной частоте многолучевого сигнала фазированной антенной решеткой, измерением с необходимой точностью по известным алгоритмам пространственных углов прихода (азимута, угла места) каждого мода принятого сигнала и оценки их энергетических параметров, формирования модели ионосферы, корректируемой на основе текущих данных вертикального, наклонного зондирования, с привлечением данных спутниковой томографии и магнитометров, а также радиофизической модели среды распространения радиоволн КВ диапазона, решению прямых и обратных задач, возникающих в процессе однопозиционного местоопределения и коррекции модели ионосферы.
Преимуществом, обеспечиваемым приведенной совокупностью признаков, является:
Во-первых, более полный учет особенностей распространения КВ сигналов.
Во-вторых, учет ошибок, вносимых знанием ионосферы, методом расчета траекторий распространения и измерения углов прихода пеленгатором.
В линейном приближении ошибку по дальности σR можно оценить по формуле:

где  - производная дальности по углу места;
- производная дальности по углу места;
 - коэффициент учитывающий влияние относительной ошибки электронной концентрации на оценку дальности:
- коэффициент учитывающий влияние относительной ошибки электронной концентрации на оценку дальности:
 - СКО определения угла места;
- СКО определения угла места;
δN - относительная ошибка оценки электронной концентрации.
В формуле (1) используется предположение о независимости ошибок измерения углов прихода модов сигнала и знания пространственного распределения электронной концентрации ионосферы. Используя следствие из теоремы Мартина после несложных преобразований для коэффициента учета ошибок определения электронной концентрации можно получить:

где  - высота в точке поворота;
- высота в точке поворота;
f - частота радиоволны;
fo - плазменная частота в точке поворота луча.
В (1) при однопозиционном местоопределении содержатся и ошибки расчета траекторий распространения радиоволн через производную от дистанционно-угловой характеристики  и определение высоты точки поворота по формуле (2). Как и в патенте RU №2285934 основой при лучевых расчетах численно решается задача Коши для известной системы дифференциальных уравнений, однако вблизи точки поворота луча, где точное численное решение из-за ошибок вычислений невозможно применяется специальная аппроксимация позволяющая найти с точностью недостижимой в указанном патенте.
и определение высоты точки поворота по формуле (2). Как и в патенте RU №2285934 основой при лучевых расчетах численно решается задача Коши для известной системы дифференциальных уравнений, однако вблизи точки поворота луча, где точное численное решение из-за ошибок вычислений невозможно применяется специальная аппроксимация позволяющая найти с точностью недостижимой в указанном патенте.
В-третьих, проведение идентификации приходящих модов используя не только лучевые, но и энергетические и флуктуационные характеристики распространяющихся сигналов с использованием критерия максимального правдоподобия.
В-четвертых, принятие специальных мер обеспечивающих устойчивость решения задачи определения местоположения ИРИ при коррекции параметров модели ионосферы в процессе решения некорректных обратных задач ВЗ и НЗ ионосферы.
В-пятых, измерение углов прихода с оценкой числа эффективных модов распространения.
В-шестых, применение единого целевого подхода к построению модели ионосферы, решению прямых и обратных задач возникающих в процессе местоопределения и коррекции модели ионосферы.
Сущность изобретения поясняется чертежами, на которых изображено:
на фиг. 1 - Пример модовой структура КВ сигналов на частоте 17,1 МГц на трассе 2233 км;
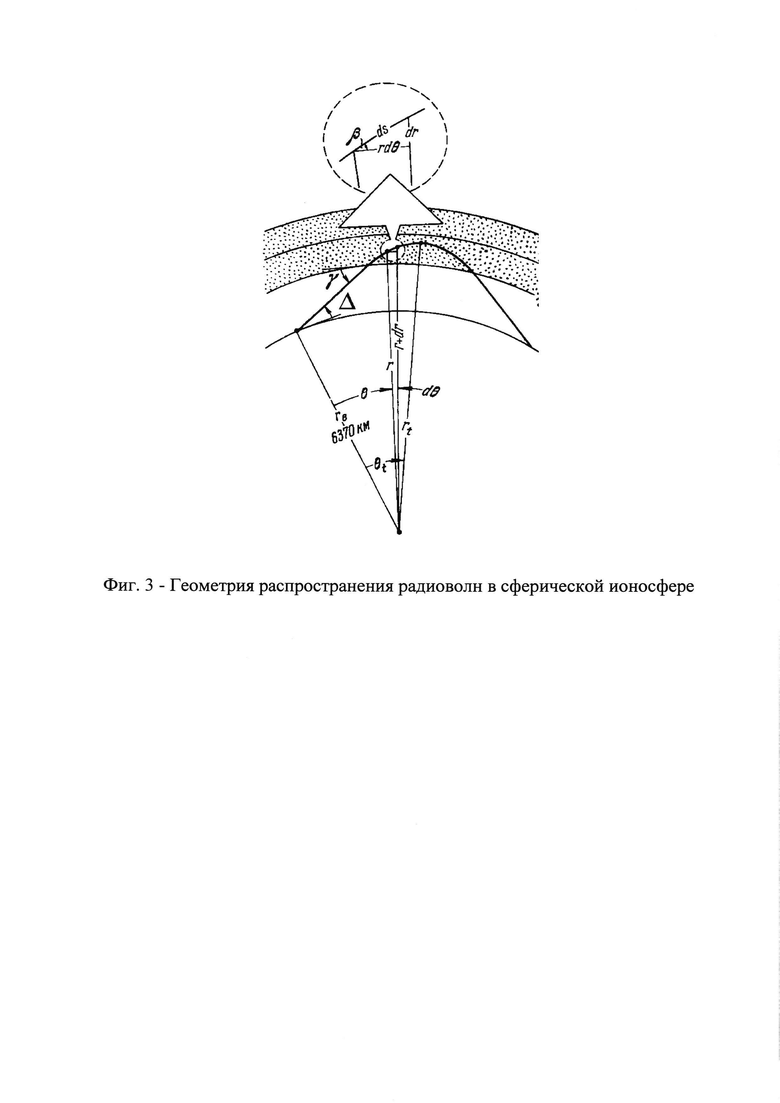
на фиг. 2 - Структурная схема однопозиционного местоопределения координат ИРИ;
на фиг. 3 - Геометрия распространения радиоволн в сферической ионосфере.
Предлагаемое изобретение поясняется структурной схемой (Фиг. 2) предлагаемого способа решения задачи однопозиционного местоопределения ИРИ.
Работает устройство следующим образом:
Приемная антенная решетка включает не менее 16-ти антенных элементов (АЭ), что определяется возможным разрешением до 4-х модов принимаемого поля. Каждый мод характеризуется амплитудой, фазой, углом места и азимутом, т.е., для однозначного решения задачи в одномодовом поле необходимо не менее 4-х АЭ. Вопрос поляризационного приема решается использованием конструкции АЭ обеспечивающей раздельный прием обеих компонент поля. Технология изготовления АЭ обеспечивает неравномерность их коэффициента передачи не более 1 дБ по амплитуде и 3-х градусов по фазе.
В качестве радиоприемного устройства (РПУ) используется многоканальное аналого-цифровое РПУ с числом каналов равным числу АЭ. Использование аналого-цифровой схемы определяется динамическим диапазоном помех в КВ диапазоне радиоволн, который достигает 120 дБ/Вт, что не обеспечивают существующие на данный момент аналого-цифровые преобразователи. Наличие аналоговой части требует проведения калибровки приемных каналов для обеспечения их идентичности. Проводимая калибровка с последующим выравниванием комплексных коэффициентов передачи приемных каналов обеспечивает неравномерность по амплитуде менее 1 дБ и 1 градуса по фазе.
Высокая идентичность приемных каналов (включая АЭ) позволяет использовать методы сверхразрешения при измерении углов прихода с одновременной оценкой числа принимаемых модов. Оценка энергетики модов с флуктуационными характеристиками упрощает в дальнейшем задачу их идентификации при местоопределении.
Магнитные данные позволяют ввести поправки на магнитные возмущения в модели ионосферы. Уровни геомагнитной активности выражаются с помощью индекса - Ак, показывающего величины магнитного и ионосферного возмущения. Индекс высчитывается на основе измерений магнитного поля, проводящихся ежедневно с трехчасовым интервалом, начиная с нуля часов по мировому (гринвичскому) времени. Максимальные величины магнитного возмущения сравниваются со значениями магнитного поля спокойного дня для конкретной обсерватории и в расчет принимается наибольшая величина из отмеченных отклонений. Наблюдения из 13 геомагнитных обсерваторий, расположенных на геомагнитных широтах от 44 до 60 градусов в обоих полушариях планеты позволяют определить среднепланетарный Ар-индекс. Индекс Ар выражается в целых числах от 0 до 400.
Единственная общепринятая модель в том числе, используемая в IRI-2012, как функция реакции на магнитную бурю основана на трехчасовых Ар индексах за 36 часовой период времени предшествующий интересуемому. Анализ основан на данных с 75 ионозондов для 43 бурь. Модель эмпирическая. Она включает 1000 коэффициентов Cij зависящих от дня года и магнитной широты на основе которых в зависимости от интегрального уровня магнитной активности с помощью степенных рядов определяется шторм фактор равный отношению критической частоты слоя F2 в возмущенных условиях к критической частоте слоя в спокойной ионосфере.
Используемый в модели IRI алгоритм учета Ар индексов следующий. Из исходного массива трехчасовых {Api : i=1…13} формируется массив {Aej : j=1…39} имитирующий часовые значения Ар индексов. Каждое 3-х часовое значение Ае совпадает с соответствующим значением Ар, а промежуточные значения, соответствующие часовым значениям, определяются методом линейной интерполяции между 3-х часовыми узлами.
Вычисляется сумма соответствующая интегралу по времени за 36 часовых интервалов начиная со 2-го, 3-его или 4-го значения элемента массива Ае (значение k=1, 2 или 3):

где fapi - коэффициенты.
Если Rp<200, коррекция не проводится, в противном случае рассчитывается шторм фактор.
Основной проблемой, возникающей при использовании 1-го магнитометра при оценке Ар-индекса является отсутствие планетарного представления, которое обеспечивается усреднением измерений на 13 магнитных станциях, данные с которых в оперативном режиме практически невозможно получить.
Для получения интегрального значения Rp, определяемого по формуле (3), используется следующая процедура. На магнитометре, входящем в состав комплекса местоопределения, определяются не трехчасовые индексы Ак, а часовые Aei, получаемые в модели учета возмущений линейной интерполяцией трехчасовых значений. Причем оценка этих индексов проводится не по случайному максимальному выбросу магнитных измерений за часовой интервал, а путем оценки квантиля распределения значений А за этот интервал. Это обеспечивает более надежную оценку за счет замены усреднения по пространству усреднением по времени, что в значительной степени повышает достоверность оценок. Далее по формуле

оценивается Rp, которое используется для расчета шторм фактора.
Модель ионосферы примененная в способе в отличие, например, от IRI-2001 используемой в Патенте RU №2285934, модернизирована. IRI-2001 и ее последняя версия IRI-2012 представляют собой набор моделей число комбинаций из которых измеряется сотнями. Авторы патента не конкретизируют установки вариантов модели, следовательно используют штатные установки. Недостатки такого подхода следующие. Во-первых, при вычислении критических частот слоя F2 используются коэффициенты разложения "ursi", а не "ccir" рекомендованные ITU-R, что по результатам сравнения с данными современных континентальных ионозондов дает меньшую точность представления критических частот слоя F2 (f0F2). Во-вторых, вероятностные характеристики появления слоя F1 не соответствуют наблюдаемым для региона РФ, что приводит к искажению формы профиля электронной концентрации (N(h)-профиля) и в дальнейшем к неверной оценке многомодовости и траекторий распространения радиоволн. Существенным недостатком моделей IRI является отсутствие адекватного представления высот максимума слоя F2 (hmF2), что ставит под сомнение возможность точного определения местоположения при полном учете формы N(h)-профиля в расчетах. В моделях IRI hmF2 определяется из коэффициента M3000F2, который вычислялся исходя из параболической аппроксимации профиля электронной концентрации области F2, что в большинстве времен суточно-сезонного цикла приводит к систематическому завышению оценок высот и, следовательно, дальности при лучевых расчетах.
Указанные причины потребовали синтеза модели ионосферы отвечающей требованиям местоопределения. Модель ионосферы обеспечивает расчет параметров модельного профиля электронной концентрации ионосферы и другие необходимые параметры для заданных точек пространства требуемых зоны, времени суток, сезона и уровня солнечной активности. В качестве базовой модели ионосферы используется модель IRI-2012. Согласно отчету Н.3.2.1, типичная точность описания профиля электронной концентрации моделью IRI составляет
- 5-15% для высот 100-200 км в дневное время,
- 15-30% для высот 100-200 км ночью,
- 15-25% для высот более 200 км в низких и средних широтах.
Отсюда следует необходимость коррекции параметров модели по реальным измерениям. Так как модель IRI включает в себя большой набор частных моделей, ниже дана конкретизация используемого варианта.
1) Модель расчета параметров области F2
Модель включает коэффициенты CCIR, которые позволяют предсказывать критические частоты области F2. Модель включает 24 карты для месяцев года двух уровней солнечной активности 10 и 100. Для предсказания f0F2 используется текущее 12 месячное среднее значение ионосферного индекс IG12 и линейная интерполяция для времени и солнечной активности.
Массивы коэффициентов CCIR включают коэффициенты M3000F2, с помощью которых определяется высота максимума F2 (hmF2). Высота максимума находится в тесной антикорреляции с критической частотой и определяется по формулам:

CF=ƒ1/(ƒoF2/ƒoE-ƒ2)+ƒ3.
Здесь hmF2 в км. Факторы ƒ1, ƒ2 и ƒ3 константы, зависящие от текущего 12 месячного среднего значения числа солнечных пятен Rz12 и магнитной широты.
2) Модель расчета параметров областей Е и F1
Электронная плотность областей Е и F1 в большей степени определяется балансом природных фотохимических процессов, а максимум плазменных частот строго зависит от зенитного угла Солнца χ. Модель IRI в среднем показывает разницу между реальными данными от 5 до 15%.
Для высоты максимума слоя Е принято постоянное значение равное 110 км. Значение полутолщины слоя равно 20 км.
Модель foF1 основана на магнитных широтах. При этом используется вариант расчета из набора функций IRI - по зенитному углу Солнца с L-условиями. Высота максимума электронной концентрации области F1 (hmF1) определяется по форме N(h)-профиля.
3) Форма N(h)-профиля соответствует рекомендованной в модели IRI-2007.
Отличия от моделей представленных в IRI состоят в следующем.
1) Вычисленная по формуле (5) hmF2 корректируется с помощью специальной функции

где d - день года,
h - время (час, десятые доли часа по местному времени),
Rz12 - число солнечных пятен.
Функция D основана на эмпирических коэффициентах полученных в результате обработки данных ионозондов осуществляющих определение hmF2 по N(h)-профилю ионосферы. Полученное таким образом по формуле (6) новое значение HmF2 используется в дальнейших расчетах.
2) Модель вероятности появления слоя F1 скорректирована введением сезонного фактора fs=1.0+cos((d-173.5)*27π/365), который при умножении на вероятность появления слоя F1 (f1pb) используется для предсказания наличия слоя. Если f1pb*fs превышает значение порога, определяемого по данным ВЗ, то слой считается присутствующим.
3) Введена модель спорадического слоя Es. Модель позволяет по дню года, местному времени, числу солнечных пятен, географическим координатам оценить предельную частоту слоя Es. В основе используется модель EsKGU. Это прогностическая вероятностная модель расчета медианных значений предельных частот и высот слоя Es, в которой суточные вариации указанных параметров описываются тригонометрическим полиномом в виде разложения в ряд Фурье вида

где а0, ak bk - коэффициенты ряда Фурье для частот,
k - номер гармоники,
t - местное время в часах.
Проверки, проведенные авторами данной модели, показали, что соответствие расчетных и экспериментальных распределений имело место: зимой - в 71% случаев, в равноденствие - в 70%, летом - в 77%. Т.е. вероятностные характеристики предсказания данной модели не высоки. Поэтому при использовании в составе модели ионосферы эти представления используются в случае, если спорадический слой Es наблюдается по данным ВЗ или (и) НЗ ионосферы, с соответствующей корректировкой по результатам измерений.
4) Реализация модели ионосферы IRI выполнена на языке С++, включает только нужные компоненты и оптимизирована под структуру языка.
Радиофизическая модель реализует расчет траекторий распространения радиоволн на трассах зондирования ионосферы и приема сигналов ИРИ. Расчет траекторий распространения радиоволн проводится в диапазоне частот 1,0…30 МГц в азимутальной зоне 360° и дальностях до 4500 км относительно центра. Задача решается для трехмерно-неоднородной ионосферы в приближениях геометрической оптики. Закон преломления радиоволн используется в следующем виде:


где n - показатель преломления вдоль траектории распространения радиоволн;
dS - элемент траектории, точки которой определяются координатами сферической проекции на взаимно-перпендикулярные плоскости: плоскость дуги большого круга, проходящей через центр земли пункты передачи и приема, и перпендикулярную к ней. В первой плоскости положение текущей точки определяется координатами R и θ, в перпендикулярной - R и χ;
χ - боковое угловое отклонение траектории от плоскости дуги большого круга;
θ - угловое расстояние в плоскости дуги большого круга;
ϕ и ψ - углы между проекциями волнового вектора и радиусом R в плоскостях Rθ и Rχ.
Решение уравнений (8) проводится с учетом результатов полученных в:
1) изменения расстояния скачка и углов прихода в вертикальной плоскости в основном обусловлено градиентами ионосферы в плоскости дуги большого круга,
2) боковые отклонения углов прихода в азимутальной плоскости определяются градиентами в поперечной плоскости.
Это позволяет искать решение сначала в плоскости большого круга с последующей корректировкой на боковые градиенты. Решение в плоскости большого круга ищется в виде

для дальности скачка,

для группового пути.
Используемые обозначения иллюстрирует Фиг. 3.
Здесь r - расстояние от центра Земли;
re - радиус Земли;
rt - высота траектории в точке поворота луча,
r01 - высота входа луча в ионосферу,
r02- высота выхода луча из ионосферы,
q(r)=r2μ2-ρ2,
ρ=recosΔ,
Δ - угол места излучения луча,
μ - фазовый показатель преломления, связанный с электронной концентрацией соотношением 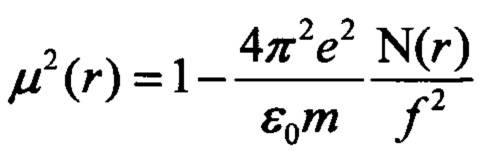 ,
,
е, m - заряд и масса электрона,
ε0 - диэлектрическая проницаемость свободного пространства,
f - частота волны,
ε - некоторая малая величина, зависящая от точности вычислений.
Точка поворота rt, определяется из условия 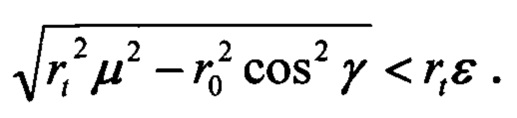
Разбиение интегрирования по траектории S на пять интегралов обусловлено следующими причинами. В свободном пространстве μ=1, соответствующие выражения для D и Pg интегрируются по аналитическим формулам, а исходные интегралы разбиваются на две части - внеионосферную (первый и пятый интегралы в формуле (9) и формуле (10)) и ионосферную. Наличие градиентов электронной концентрации в общем случае приводит к несовпадению углов входа в ионосферу и выхода из нее, что определяет разбитие внеионосферной зоны на два участка интегрирования. Интеграл в ионосферной части является несобственным, имеющим разрыв в точке поворота, где знаменатель  Это определяет разбитие ионосферной части траектории на 3 части.
Это определяет разбитие ионосферной части траектории на 3 части.
При произвольной форме профиля электронной концентрации аналитическое интегрирование ионосферной части невозможно и вычисления проводятся численными методами.
Для этого осуществляется интерполяция значений электронной концентрации N(ri), формируемых геофизической моделью на высотах ri, сплайном второго порядка. Отрезок [r0, rm] от основания до высоты максимума электронной концентрации rm разбивается на М отрезков: ri=r0+Δri, где Δr=(rm - r0)/М. На каждом отрезке [ri, ri+1] профиль распределения электронной концентрации представляется квадратным трехчленом:
N(r)=Si(r)=air2+bir+ci при r∈[ri, ri+1]
с условиями гладкости на концах:
N(ri)=Si(ri)=Si+1(ri), i=1,…,M-1; N(r0)=S(r0), N(rM)=SM-1(rM);
 .
.
В окрестности точки поворота, когда вычислительная погрешность не позволяет использовать численные методы, описание профиля заменяется квазипараболической зависимостью, что позволяет взять третий интеграл аналитически.
ƒN2(r)=Q1(r)=(A1r2+B1r+C1)/r2 при r ∈ [rt-ε, rt+ε];
Q1(rt-ε)=ƒN2(rt-ε), Q1(rt+ε)=ƒN2(rt+ε);
Q1'(rt-ε)=(ƒN2(rt-ε))'.
В качестве rt+e выбирается первая после rt-ε узловая точка интегрирования, для которой подкоренная функция  и в третьих интегралах выражений (8) и (9) функция F(r) - r2/μ2 -ρ2 заменяется на функцию
и в третьих интегралах выражений (8) и (9) функция F(r) - r2/μ2 -ρ2 заменяется на функцию  где μ12=1 - Q1(r)/ƒ2. Высота поворота rt1 определяется из уравнения F1(rt)=0.
где μ12=1 - Q1(r)/ƒ2. Высота поворота rt1 определяется из уравнения F1(rt)=0.
Второй и четвертый интегралы вычисляются численно.
Проведенная оценка точности определения дальности при данном представлении дала суммарную ошибку вычислений менее 0,2 км при ε=0,05.
Азимутальная девиация (отклонение луча от плоскости большого круга) определяется по формуле:

где iχ - угол наклона линии равной электронной концентрации (изолиний).
Угол наклона изолиний в радианах оценивается по формуле:
iχ=arctg{(h2-h1)/(2×re+h1+h2)×ctg(χ/2)},
подставляя в (11) получим выражение для расчета азимутальной девиации:
Δβ=arctg{tg(Δ)×(h2-h1)/(2×re+h1+h2)×ctg(χ/2)},
где h1, h2 - значения высот равной электронной концентрации относительно поверхности Земли в двух соседних точках изолинии на дальности точки поворота при условии, что концентрация электронов в этих точках меньше высоты максимума электронной концентрации. Определяются высота ho=rt-re точки поворота и значение плазменной частоты fo в этой точке. В соседних по азимуту точках сетки этой же дальности находятся высоты, соответствующие частоте fo;
χ - центральный угол, соответствующий расстоянию между точками 1 и 2.
ctg(χ/2)=Const/Ro,
где Ro - дальность до точки поворота;
Const=re/tg(a/2);
а - азимутальное расстояние между линиями сетки расчета электронной концентрации.
Истинный азимут определяется по формуле:
β=βизм+Δβ,
где βизм - оценка азимута прихода сигналов ИРИ.
Для местоопределения положения ИРИ в силу динамики и нестационарности ионосферы одних модельных представлений недостаточно. Адекватное представление ионизации в ионосфере обеспечивается ее диагностикой радиофизическими методами с последующей коррекцией параметром модели среды по ее результатам. Коррекция проводится на двух уровнях глобальном и региональном.
Применен математический аппарат, который учитывает не только корреляционные свойства ионосферы, но и различные точности и возможности определения характеристик ионосферной плазмы различными методами зондирования с учетом флуктуационных характеристик.
Основной вес в адаптацию и стабилизацию решений вносит метод ВЗ, который позволяет скорректировать параметры нижних (до F2) областей ионосферы, распространив эти результаты на весь регион радиусом до 3000 км от места установки комплекса однопозиционного местоопределения. Область F2 корректируется в центре с учетом флуктуаций ее параметров и через корреляционные зависимости распространяется на весь регион. Данные космической радиотомографии с учетом точности их получения используются для дальнейшей пространственной коррекции параметров области F2 с использованием данных ВЗ для калибровки, а результаты НЗ, характеризующие всю область распространения, учитываются через корректировку шторм фактора.
Для уменьшения флуктуационных ошибок используется временное сглаживание с эффективной памятью полученных параметров модели ионосферы по результатам непрерывной серии измерений.
Реализация метода ВЗ не требует специальных аппаратурных средств и реализуется на антенной решетке и приемном устройстве пеленгатора с распределенным по антенным элементам усилителям мощности излучения. Зондирование проводится в специально выделяемые интервалы, их суммарная длительность не превышает 1,5% времени работы пеленгатора. Получение и обработка с получением профиля электронной концентрации результатов ВЗ выполняются автоматически. Некорректность решения обратной задачи ВЗ устраняется поиском решения в классе N(h)-профилей используемых в синтезированной модели ионосферы данной выше. При построении профиля проверяется гипотеза о наличии спорадического слоя Es. Если гипотеза подтверждается, то определяются тип слоя (высокий/низкий) и его параметры с коррекцией формы N(h)-профиля.
Получаемые параметры профиля электронной концентрации: критическая частота слоя F2 (f0F2), высота максимума электронной концентрации слоя F2 (hmF2), критическая частота слоя F1 (f0F1), высота максимума электронной концентрации слоя F1 (hmF1), критическая частота слоя Е (f0E), высота максимума электронной концентрации слоя Е (hmE), критическая частота слоя Es (f0Es), высота максимума электронной концентрации слоя Es (hmEs), тип Es служат основой для выполнения коррекции модели ионосферы, результатом которой является получение значений электронной концентрации в узловых точках системы координат азимут (β), дальность (R), высота (h). При расчете траекторий распространения радиоволн эти узловые значения, описывающие скорректированную модель ионосферы, используются для построения распределения электронов по трассе распространения радиоволн.
Коррекция модели ионосферы делится на глобальную, региональную и флуктуационную. Глобальная модель ионосферы на базе IRI-2012 в качестве входных параметров использует среднемесячные ионосферный индекс IG12 и число солнечных пятен Rz12. Определение конкретных значений IG и Rz на требуемый день и время суток проводится путем линейной интерполяции соседних среднемесячных значений IG12 и Rz12, сглаженные значения которых спрогнозированы, по крайней мере, на год вперед. Глобальная коррекция позволяет получить эти индексы на требуемый период наблюдений.
Критическая частота области F2 линейно связана с ионосферным индексом IG, который рассчитывается усреднением f0F2 полученных в результате ВЗ на 13-ти ионозондах разбросанных по Земному шару. В нашем случае имеется один ионозонд, получивший значения f0F2 в одной точке. Глобальное значение IG корректируется следующим образом. Рассчитывается значение IGi, соответствующие измеренному значению критической частоты f0F2i в i-ый момент времени по формуле

где IG - индекс, определенный на предыдущем шаге коррекции или по прогнозу;
f0F2 - значение критической частоты, определенное по индексу IG.
Формируется новый глобальный индекс

где 0<η<1 коэффициент, зависящий от координат зондирования.
В IRI число солнечных пятен Rz участвует в определении f0E, f0F1 и hmF2. Однако, как видно из (5), связь нелинейная. Точности оценок f0E, f0F1 и hmF2 на основе измерений при ВЗ и их связь с Rz различны. Поэтому значение Rzi ищется путем минимизации средневзвешенной суммы

где ak, k=1…3 - весовые коэффициенты, параметры f0E, f0F1 и hmF2 с индексом i соответствуют рассчитанным по модели по значению Rzi, а без индекса определенным из рассчитанного по данным измерений N(h)-профилю. Коэффициенты ak обнуляются, если соответствующее измерение не получено.
Полученное таким путем значение Rzi сглаживается с предыдущим

где  подобранный коэффициент и используется далее в качестве глобального.
подобранный коэффициент и используется далее в качестве глобального.
В случае, если обнаружен спорадический слой Es, рассчитывается отношение измеренной критической частоты f0Es к прогнозной, определенной по формуле (7), и по (7) формируются критические частоты Es скорректированные на эту величину. Высота максимума электронной концентрации слоя Es в зоне полагается равной измеренной.
Завершающим этапом коррекции по данным ВЗ является корректировка по данным измерений hmE и YmE, которые являются глобальными для модели IRI. Операция выполняется по формулам аналогичным (13) и (14) с заменой индекса IGi на измеренные параметры hmEi и ymEi
Коррекция параметров модели ионосферы по данным космической томографии базируется на использовании двухчастотных сигналов навигационных спутников ГЛОНАСС и GPS принимаемых в точке расположения ионозонда ВЗ. Метод позволяет охватить зону радиусом до 1000 км. Разность дальности прихода сигналов на двух частотах в приближении локальной сферически однородной ионосферы связывается с электронной концентрацией уравнением радиопросвечивания

где h0 и hm - нижняя и верхняя высота границ ионосферы,
Y - зенитный угол наблюдения спутника с точки наблюдений,
h - текущая высота от поверхности Земли,
δ - неустранимая погрешность измерений, зависящая от частоты.
Это интегральное уравнение 1-го рода типа Фредгольма, его решение относится к классу некорректно поставленных задач. Получаемые N(h)-профили в основном характеризуют область F2 не отражают спорадических образований. Однако, в течении суток можно получить из одного пункта наблюдений более 20000 профилей электронной концентрации, что позволяет приблизить модель ионосферы к реальности.
Проведение калибровки измерений по данным ВЗ позволяет обеспечить получение массива данных в зоне радиусом до 1000 км содержащего f0F2 и hmF2 для географических точек, над которыми находятся в данный момент навигационные спутники. Эти данные используются для определения региональных индексов IGr и Rzr.
Зона радиусом 1000 км разбивается на М участков {θm, m=1…М} шириной 15-30° по азимуту и ~250 км по дальности. На интервале времени квазистационарности ионосферы (≤15 минут) по формуле (12) определяются массивы индексов {IGrim} по спутниковым профилям соответствующих участкам θm. Рассчитывается региональный индекс для каждого участка, в котором получена информация
где Im - число измерений в m-ом участке.
Одновременно определяется Rzrim как  и рассчитывается среднее за интервал
и рассчитывается среднее за интервал
Далее по формулам (13) и (14) вычисляются сглаженные относительно глобальных индексов значения, которые принимаются за региональные на очередной интервал времени. Для произвольной точки с координатами азимут-дальность (а,r) в пределах радиуса 3000 км от центра региональные индексы определяются по формулам


где
F(xar - xm)=F'(φ)⋅F'(λ) - функция корреляции для точки с координатами (а,r) с точкой xm;
ϕ - разница широт точки (а,r) и центром участка θm (точка xm);
λ - разница долгот точки (а,r) и центром участка θm;
Δλ,Δφ - параметры определяющиеся корреляцией по долготе и широте
зависящие от даты, времени и географических координат.
Сложность использования результатов НЗ ионосферы обусловлена тем, что в формировании сигналов НЗ участвует вся среда распространения вдоль трассы зондирования и применить эти результаты (в отличие от ВЗ и спутниковой томографии, характеризующих одну точку) затруднительно. Шторм фактор сƒ определяется с помощью функции "STORM" модели IRI по значению Rp, рассчитанному по формуле (8). При наличии возмущений (Rp>200) критическая частота F2 в рассматриваемой географической точке корректируется на величину шторм фактора: f0F2=cf×f0F2. Значение в соседних точках траектории в фиксированный момент времени зависит только от геомагнитных координат. Для рассматриваемых трасс с учетом точности определения результатов НЗ величина с/считается постоянной.
Автоматическая обработка и интерпретация время-частотных характеристик (ВрЧХ) НЗ проводится с использованием расчетов траекторий и скорректированной модели ионосферы описанной выше. Обработка предполагает нахождение наиболее правдоподобной гипотезы о расчетных ВрЧХ совпадающих в смысле критерия максимального правдоподобия с экспериментальными измерениями. Поиск предполагает нахождение коэффициента деформации модели ионосферы. Т.е., если в результате поиска обнаружена гипотеза, удовлетворяющая экспериментальным данным, то тем самым определен дополнительный фактор cf', который фиксируется в направлении трассы НЗ и распространяется на азимутальный сектор ±15° относительно этого направления.
Задача однопозиционного местоопределения решается следующим образом. Имеем на входе последовательность измерений углов прихода сигналов на частоте f. Каждое измерение i описывается вектором Xi={ αi, βi, Qi}, i=1…I, где I - число измеренных углов прихода модов, состоящим из составляющих:
 - азимутальный угол;
- азимутальный угол;
βi - угол места;
Qi - отношением сигнал/помеха.
И корреляцционной матрицей ошибок i-ro измерения
σαi - СКО оценки азимута;
σβi - СКО оценки угла места;
σQi - СКО оценки отношения сигнал/помеха.
С другой стороны для данной последовательности измерений указанным выше методом по скорректированной модели ионосферы рассчитаны значения дальностей и отношения сигнал/помеха для всех возможных модов распространения, приходящих под углами (αi, βi). Т.е. определены расчетные векторы  с матрицами ошибок
с матрицами ошибок  возможным m=0…Mi модам распространения под i-ми углами.
возможным m=0…Mi модам распространения под i-ми углами.
Задача состоит в определении наиболее вероятной дальности, с которой пришли эти сигналы. Она решается для двух возможных ситуаций 1-я возникает при i=1, когда по геометрическим представлениям нет возможности определить число скачков, 2-я при i>1 сужает неопределенность, но требует дополнительных условий.
В первой ситуации учитывая априорную информацию о произведении коэффициента усиления антенны ИРИ на мощность излучения в направлении на пеленгатор решается задача: принятый мод распространения имеет 1-н или 2-а скачка. Ограничение по количеству скачков связано с максимальной дальностью решения задачи (до 3500 км). Используется критерий максимума апостериорной вероятности, который в случае нормальных распределений преобразуется к виду

где, С константа, зависящая от априорных данных и функций потерь, индекс m=1 соответствует гипотезе одного скачка, 2 - двум скачкам. В случае выполнения неравенства (15) принимается решение о приходе сигнала ИРИ с дальности соответствующей одному скачку, в противном случае с дальности 2-х скачков.
При принятии решения о двух скачковом моде уточняется дальность второго скачка нахождением траектории второго скачка, отвечающим условию

где а2 - угол падения второго скачка на поверхность Земли.
Во второй ситуации для каждого i-ro измерения по критерию (15) определяется соответствие измерения - ситуации односкачкового мода. Если все измерения соответствуют односкачковым модам, то рассчитывается средневзвешенная дальность ИРИ

где Di - дальность соответствующая по модельным расчетам i-му измерению,
σDi - СКО оценки i-ой дальности.
Если среди измерений имеются относящиеся как к односкачковым, так и двухскачковым модам, тогда для односкачковых мод рассчитывается средневзвешенная дальность по формуле (16), а для двухскачковых мод ищется вариант попадания второго скачка на дальность D. Если такой вариант находится, то эта D используется в качестве оценки координат ИРИ. В противном случае определяется дальность двухскачкового мода D' наиболее близкая к D и по формуле (16) с учетом переопределенных дисперсий проводится уточнение дальности до ИРИ.
В случае, если все измерения соответствуют многоскачковым модам определяется комбинация соответствующая  , где Dv - дальность, рассчитанная по (16) для v-ой допускаемой комбинации скачков. Дальность Dv соответствующая этому минимуму принимается за дальность ИРИ.
, где Dv - дальность, рассчитанная по (16) для v-ой допускаемой комбинации скачков. Дальность Dv соответствующая этому минимуму принимается за дальность ИРИ.
Повышение точности однопозиционного местоопределения источников радиоизлучения впервые достигается за счет осуществления единого целевого подхода, заключающегося в совмещении функций измерения пространственных (азимута и угла места) и энергетических параметров многолучевого поля принимаемого сигнала каждого луча, корректировки модели ионосферной плазмы на основе текущих данных вертикального, наклонного, радиотомографического зондирования и магнитометров, после коррекции которой рассчитываются геофизическая и радиофизическая модели, позволяющие восстановить траекторию каждого луча в ионосфере в измеренных направлениях прихода.
Существенными отличительными признаками заявляемого технического решения по сравнению с прототипом, обеспечивающими ряд технико-экономических преимуществ, являются:
- повышение точности измерения пространственных параметров (азимута и угла места) многолучевого поля сигнала каждого луча за счет введения поправок по данным скорректированной модели ионосферной плазмы на основе текущих ионограмм вертикального и наклонного зондирования, а также данных спутниковой томографии и магнитометров;
- повышение достоверности параметров ионосферы за пределами ограничений, принятых в прототипе, что позволяет существенно расширить условия применения, фактически довести их до круглогодичного и круглосуточного применения, вне зависимости от вероятности появления слоя F1 и/или проявления спорадического слоя Es, не учитываемого ни в одной прогнозной модели, или от прохождения перемещающихся ионосферных возмущений и других интенсивных неоднородностей различных масштабов;
- повышение точности расчета лучевых траекторий распространения радиоволн, особенно вблизи точки поворота луча при произвольной форме профиля электронной концентрации, за счет применения специальной аппроксимации, позволяющей найти высоту отражения с точностью недостижимой для прототипа;
- устранение аномальных ошибок определения местоположения, вызванных отклонением лучевой траектории, за счет идентификации приходящих модов, используя не только лучевые, но и энергетические, и флуктуационные характеристики распространяющихся сигналов с использованием критерия максимального правдоподобия;
- однозначного местоопределения источников радиоизлучений за счет специальных мер, обеспечивающих устойчивость решения задачи определения местоположения при коррекции параметров модели ионосферы в процессе решения некорректных обратных задач вертикального и наклонного зондирования ионосферы.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ МЕСТООПРЕДЕЛЕНИЯ ИСТОЧНИКОВ РАДИОИЗЛУЧЕНИЯ | 1999 |
|
RU2154281C1 |
| Способ местоопределения источников декаметрового радиоизлучения | 2022 |
|
RU2798776C1 |
| СПОСОБ ОДНОПОЗИЦИОННОГО ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ДКМВ ПЕРЕДАТЧИКОВ | 2004 |
|
RU2285934C2 |
| СПОСОБ ПОИСКА ДЕКАМЕТРОВЫХ ПЕРЕДАТЧИКОВ | 2005 |
|
RU2302646C1 |
| СПОСОБ МЕСТООПРЕДЕЛЕНИЯ РАДИОИЗЛУЧАТЕЛЕЙ | 1993 |
|
RU2072524C1 |
| СПОСОБ ЗОНДИРОВАНИЯ ИОНОСФЕРЫ, ТРОПОСФЕРЫ, ГЕОДВИЖЕНИЙ И КОМПЛЕКС ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2011 |
|
RU2502080C2 |
| Способ зондирования ионосферы и тропосферы | 2018 |
|
RU2693842C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ АВРОРАЛЬНОГО ОВАЛА И СОСТОЯНИЯ МАГНИТНОГО ПОЛЯ ЗЕМЛИ | 2015 |
|
RU2601387C1 |
| ИОНОСФЕРНЫЙ ЗОНД | 1993 |
|
RU2042129C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МАКСИМАЛЬНО ПРИМЕНИМОЙ ЧАСТОТЫ ДЛЯ ИОНОСФЕРНОЙ РАДИОСВЯЗИ | 2012 |
|
RU2516239C2 |
Изобретение предназначено для использования в радиотехнике, радионавигации, а также при исследованиях параметров ионосферы и позволяет повысить точность определения координат KB источников с одной позиции. Техническим результатом изобретения является повышение точности однопозиционного местоопределения ИРИ. Технический результат изобретения достигается за счет единого целевого подхода, включающего обнаружение и прием на известной частоте многолучевого сигнала фазированной антенной решеткой, измерение с необходимой точностью по известным алгоритмам пространственных углов прихода (азимута, угла места) каждого мода принятого сигнала и оценку их энергетических параметров, формирование модели ионосферы, корректируемой на основе текущих данных вертикального, наклонного зондирования, с привлечением данных спутниковой томографии и магнитометров, а также радиофизической модели среды распространения радиоволн KB диапазона, решение прямых и обратных задач, возникающих в процессе однопозиционного местоопределения и коррекции модели ионосферы. 3 ил.
Способ однопозиционного определения координат источников радиоизлучений коротковолнового диапазона радиоволн при ионосферном распространении, включающий прием многолучевого сигнала фазированной антенной решеткой, преобразование множества аналоговых сигналов от каждого антенного элемента в цифровые сигналы, их когерентную обработку с измерением пространственных углов прихода (азимута, угла места) каждого луча принятого сигнала, отличающийся тем, что дополнительно оцениваются энергетические параметры каждого луча, формируемая модель ионосферы корректируется на основе текущих данных вертикального и наклонного зондирования с привлечением данных спутниковой томографии и магнитометров, а также формируются геофизическая и радиофизическая модели, позволяющие восстановить траекторию каждого луча в ионосфере в измеренных направлениях прихода, на основании которых определяют первичные оценки координат засечек предполагаемых источников радиоизлучений, находят совпадение предполагаемых координат для различных вариантов односкачковых и двухскачковых мод, совпавшие засечки объединяются при использовании критерия максимума апостериорной вероятности, позволяющего повысить надежность оценок источников радиоизлучений и однозначно определить местоположение источника радиоизлучений.
| СПОСОБ ОДНОПОЗИЦИОННОГО ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ДКМВ ПЕРЕДАТЧИКОВ | 2004 |
|
RU2285934C2 |
| ИОНОСФЕРНЫЙ ЗОНД-РАДИОПЕЛЕНГАТОР | 2009 |
|
RU2399062C1 |
| Способ автоматического определения параметров ионосферных слоев по ионограммам | 2018 |
|
RU2697433C1 |
| CN 103023586 A, 03.04.2013 | |||
| DE 3641626 A1, 16.06.1988 | |||
| US 7256730 B2, 14.08.2007 | |||
| CN 100380135 C, 01.02.2006. | |||

