Изобретение относится к методам обработки радиолокационной информации и может быть использовано в импульсных и импульсно-доплеровских радиолокационных станциях (РЛС) разведки и сопровождения целей, позволяющих производить электронную перестройку частоты зондирующего сигнала от импульса к импульсу.
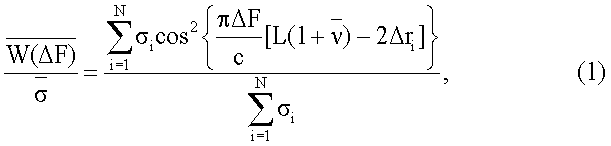
Известно радиолокационное устройство распознавания воздушных целей многочастотным способом [1], содержащее N антенн 1, N антенных переключателей (АП) 2, N генераторов 3, N приемных устройств 4, импульсный модулятор (ИМ) 5 и блок распознавания, содержащий N-1 линий задержки 6, первый сумматор 7, N-1 дополнительных сумматоров 8, N-1 двухполупериодных выпрямителей 9, второй сумматор 10, блок деления 11 и блок идентификации 12, причем ИМ 5 своим выходом связан со входами N генераторов 3, выходы которых связаны со вход-выходами соответствующих из N антенн 1 через входы соответствующих из N АП 2, выходы которых связаны со входами соответствующих из N приемных устройств 4. При этом выходы N приемных устройств 4 связаны с соответствующими из N входов первого сумматора 7, а выход первого приемного устройства 4 соединен с первым входом первого дополнительного сумматора 8, выход каждого k-го со второго по N-e приемного устройства 4 подключен ко входу (k-1)-й из N-1 линии задержки 6, выход каждой k-й с первой по (N-2)-ю из которых соединен со вторым (инверсным) входом k-го дополнительного сумматора 8 и первым входом (k+1)-го дополнительного сумматора 8. Выход (N-1)-й линии задержки 6 соединен со вторым (инверсным) входом (N-1)-го дополнительного сумматора 8. При этом выходы N-1 дополнительных сумматоров 8 через соответствующие из N-1 двухполупериодных выпрямителя 9 соединены с соответствующими из N-1 входами второго сумматора 10, выход которого подключен ко входу «делимое» блока деления 11, выход которого соединен со входом блока идентификации 12.
Предложенное построение схемы обеспечивает распознавание аэродинамической цели в динамике ее полета на различных ракурсах в квазиоптической области отражения радиоволн с учетом ее продольно-поперечных размеров. Различительный признак распознавания в этом устройстве формируется в результате сравнения сигналов на N частотах под N углами визирования в динамике полета ВЦ в турбулентной атмосфере, что эквивалентно частотным и угловым флюктуациям эффективной поверхности рассеяния (ЭПР) цели, расположенным по выделенной побочной диагонали матрицы [1].
Однако в этом устройстве предполагается одновременное излучение многочастотного сигнала (МЧС), что требует наличия большого количества генераторов, антенн, АП и приемных устройств, что значительно усложняет конструкцию РЛС, делая ее специфической только для решения вопросов распознавания ВЦ и нереальной в конструктивном исполнении.
Кроме того, признак основан на нахождении взаимосвязи ЭПР цели на соседних частотах МЧС, но под различными углами визирования, что является главным недостатком предлагаемого устройства, так как информация о радиальном размере цели, заключенная в разнице ЭПР цели на соседних частотах, будет искажена изменением конфигурации цели за счет изменения угла визирования. Достоверность распознавания ВЦ данным устройством будет невелика.
Наиболее близким техническим решением, выбранным в качестве прототипа, является устройство распознавания воздушных целей двухчастотным способом [2], изображенное на фиг.1, которое содержит задающий генератор (ЗГ), 1-й смеситель, блок гетеродинов (БГ), ИМ, антенну, 1-й сумматор, 1-й аналого-цифровой преобразователь (АЦП), 1-й фазовый детектор (ФД), усилитель мощности (УМ), антенный переключатель (АП), устройство вычисления среднего значения ЭПР (УВСЗ ЭПР), сумматор косинусных составляющих (СКС), 1-й квадратор, устройство вычисления среднего значения параметра рассеяния и приема (УВСЗ ПРП), 2-й сумматор, фазовращатель (ФВ), усилитель промежуточной частоты (УПЧ), 2-й смеситель, усилитель высокой частоты (УВЧ), устройство вычисления признака распознавания (УВ ПР), 2-й квадратор, сумматор синусных составляющих (ССС), 2-й АЦП, 2-й ФД, устройство отображения (УО), причем выход ЗГ соединяют с 1-м входом 1-го смесителя, с 2-м входом 1-го ФД, а также с входом ФВ, выход ФВ соединяют с 2-м входом 2-го ФД, 2-й вход 1-го смесителя соединяют с выходом БГ, выход БГ так же соединяют с 2-м входом 2-го смесителя, выход 1-го смесителя соединяют с 1-м входом УМ, 2-й вход УМ соединяют с выходом ИМ, выход УМ соединяют с входом АП, вход и выход АП связывают с входом и выходом антенны, а выход - с входом УВЧ, выход УВЧ соединяют с 1-м входом 2-го смесителя, выход 2-го смесителя соединяют с входом УПЧ, 1-й и 2-й выход УПЧ соединяют с 1-м входом 1-го ФД и с 1-м входом 2-го ФД, выход 1-го ФД соединяют с входом 1-го АЦП, а выход 2-го ФД соединяют с входом 2-го АЦП, выход 1-го АЦП соединяют с 1-м входом 1-го сумматора и входом СКС, а выход 2-го АЦП соединяют с входом ССС и 2-м входом 1-го сумматора, выходы СКС и ССС соединяют с входами 1-го и 2-го квадраторов соответственно, выходы 1-го и 2-го квадраторов соединяют соответственно с 1-м и 2-м входом 2-го сумматора, выход 1-го сумматора соединяют с входом устройства вычисления средней ЭПР, а выход 2-го сумматора соединяют с входом устройства вычисления среднего значения ПРП, выход которого соединяют с 1-м входом УВ ПР, 2-й вход которого соединен с выходом устройством вычисления средней ЭПР, выход УВ ПР соединен с УО. Элементы в составе 1-го и 2-го сумматоров, УВС ЭПР, СКС, ССС, 1-го и 2-го квадраторов, УВСЗ ПРП, УВ ПР в совокупности составляют в прототипе вычислительное устройство (ВУ).
Предлагаемое устройство позволяет определять протяженность радиолокационной цели вдоль линии визирования, то есть измерять радиальный размер цели.
Достоинством данного устройства является повышение достоверности распознавания воздушных целей вследствие цифровой обработки квадратурных составляющих отраженных сигналов Ucos(fn) и Usin(fn) на разных частотах. Конструктивная реализация устройства распознавания обеспечивает высокую стабильность и идентичность амплитудно-частотных характеристик сигналов на выходе устройства обработки, что достигнуто за счет одноканальной обработки отраженных сигналов на двух частотах.
В прототипе (фиг.1) распознавание типа радиолокационной цели производится путем сравнения с порогом отношения среднего значения квадрата модуля суммы комплексных амплитуд сигналов, разнесенных по частоте, что пропорционально среднему значению параметра рассеяния и приема  , к среднему значению уровня сигнала на любой из частот, что пропорционально средней ЭПР цели
, к среднему значению уровня сигнала на любой из частот, что пропорционально средней ЭПР цели  . То есть мгновенное суммирование сигналов, разнесенных по частоте, производится с учетом их фазы:
. То есть мгновенное суммирование сигналов, разнесенных по частоте, производится с учетом их фазы:
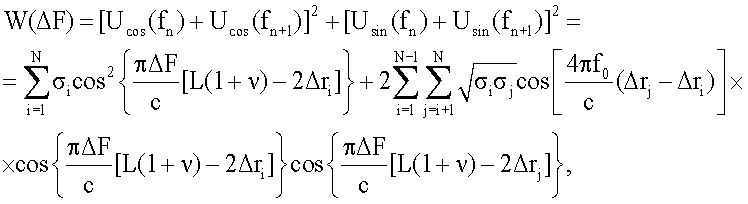


 ;
;
где σi(j) - ЭПР блестящих элементов, не зависящие от изменения частоты в ограниченном диапазоне;
N - число блестящих элементов на «освещенной» поверхности цели;
ΔF - разнос частот;
c - скорость распространения электромагнитных колебаний;
L - радиальный размер цели;
ν - безразмерное относительное смещение кажущегося центра цели относительно геометрического центра;
Δri(j) - смещение i(j)-го блестящего элемента вдоль линии визирования РЛС относительно первого элемента;
fn - n-я несущая частота зондирующего сигнала;
f0=(fn+fn+1)/2 - средняя несущая частота.
По величине  принимается решение о типе наблюдаемой цели в пределах класса [2]. Для осуществления такой обработки необходимо иметь определенную величину разноса частот двухчастотного сигнала, позволяющую производить распознавание целей в пределах классов, причем величина разноса частот подбирается оптимальной для средних радиальных размеров реальных целей.
принимается решение о типе наблюдаемой цели в пределах класса [2]. Для осуществления такой обработки необходимо иметь определенную величину разноса частот двухчастотного сигнала, позволяющую производить распознавание целей в пределах классов, причем величина разноса частот подбирается оптимальной для средних радиальных размеров реальных целей.
Однако прототип имеет ряд недостатков:
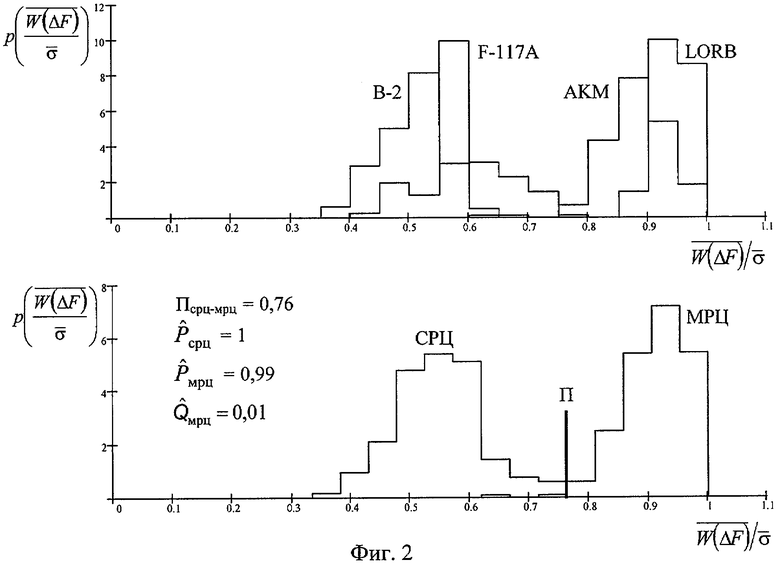
1. Из выражения (1) видно, что признак по своей физической природе характеризует только радиальный размер ВЦ, то есть наибольший вклад в значение аргумента фазового множителя на несущей частоте отраженного сигнала 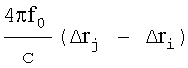 , а значит признака распознавания будут оказывать наиболее удаленные блестящие точки (БТ) цели. Внутренняя структура цели (различные типы целей в одном классе) будет влиять на флюктуации фазового множителя при изменении положения БТ в динамике полета, которые будут усреднены при нахождении величины признака распознавания. Это приведет к перекрытию гистограмм распределения признака распознавания для целей различных типов (фиг.2), а значит, что признак способен подразделять цели только на три класса: крупно-, средне- и малоразмерные (КРЦ, СРЦ, МРЦ), и утверждение о распознавании типов целей в одном классе в [2] является ошибочным.
, а значит признака распознавания будут оказывать наиболее удаленные блестящие точки (БТ) цели. Внутренняя структура цели (различные типы целей в одном классе) будет влиять на флюктуации фазового множителя при изменении положения БТ в динамике полета, которые будут усреднены при нахождении величины признака распознавания. Это приведет к перекрытию гистограмм распределения признака распознавания для целей различных типов (фиг.2), а значит, что признак способен подразделять цели только на три класса: крупно-, средне- и малоразмерные (КРЦ, СРЦ, МРЦ), и утверждение о распознавании типов целей в одном классе в [2] является ошибочным.
2. Предлагаемый признак распознавания возможно будет работать только при одновременном облучении цели сигналами двух частот, хотя по структуре построения предлагаемого устройства в прототипе это невозможно. Так как, к примеру, для точечной цели, движущейся равномерно и прямолинейно, в соответствии с законом трансформации отраженного сигнала [3] для принятого колебания можно записать:

где начальная фаза φ0 определяется дальностью в момент облучения цели r0 и скачком начальной фазы при отражении φотр (Fд - частота Допплера):
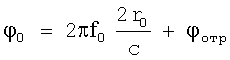 .
.
Принимаемое колебание (2) можно переписать в виде
 ,
,
где  - закон изменения фазы.
- закон изменения фазы.
То есть при неодновременном облучении цели сигналами двух частот за время, равное периоду следования импульсов Tи, цель переместится вдоль линии визирования РЛС на расстояние, равное VrTи (где Vr - радиальная скорость цели), что приведет к изменению r0 и начальной фазы сигнала на второй частоте. А при изменении расстояния до цели всего на половину длины волны фаза отраженного сигнала изменится на 2π.
Кроме того, скачок начальной фазы φотр при отражении всегда неизвестен [3], и разные Fд на разных частотах приведут к случайной величине Ф(t) даже при одновременном облучении цели двухчастотным сигналом.
Это значит, что информация о радиальном размере ВЦ, заключенная в соответствии с физическим смыслом способа в результате интерференции отраженных сигналов, разнесенных по частоте, будет искажена случайными фазовыми сдвигами принятых сигналов.
Приведенные в прототипе гистограммы распределения признака распознавания  получены на математической модели
получены на математической модели  без учета дальности до цели, ее движения и череспериодного облучения двухчастотным сигналом, и все проводимые ранее исследования осуществлялись без учета этих факторов.
без учета дальности до цели, ее движения и череспериодного облучения двухчастотным сигналом, и все проводимые ранее исследования осуществлялись без учета этих факторов.
Предлагаемое устройство распознавания воздушных целей двухчастотным способом обеспечит работоспособность признака распознавания не только при одновременном, но и при последовательном облучении цели сигналами двух частот, а также позволит решить проблему зависимости отклика устройства обработки двухчастотного сигнала от случайной фазы принятых сигналов за счет использования только амплитудной информации и нахождения степени корреляции амплитуд (мощностей) сигналов, разнесенных по частоте. Величина признака распознавания в этом случае также будет определяться радиальным размером цели.
Для решения данной задачи авторы предлагают в известное устройство распознавания воздушных целей двухчастотным способом [2], содержащее: ЗГ, 1-й смеситель, БГ, ИМ, антенну, 1-й сумматор, 1-й АЦП, 1-й ФД, УМ, АП, УВС ЭПР, СКС, 1-й квадратор, УВСЗ ПРП, 2-й сумматор, ФВ, УПЧ, 2-й смеситель, УВЧ, УВ ПР, 2-й квадратор, ССС, 2-й АЦП, 2-й ФД, УО, дополнительно ввести устройство вычисления мгновенного значения модуля разности сигналов 2-х частот и устройство усреднения модуля разности сигналов 2-х частот, исключить СКС, ССС, 1-й сумматор, УВСЗ ПРП. Все изменения входят в состав устройств, составляющих вычислительное устройство.
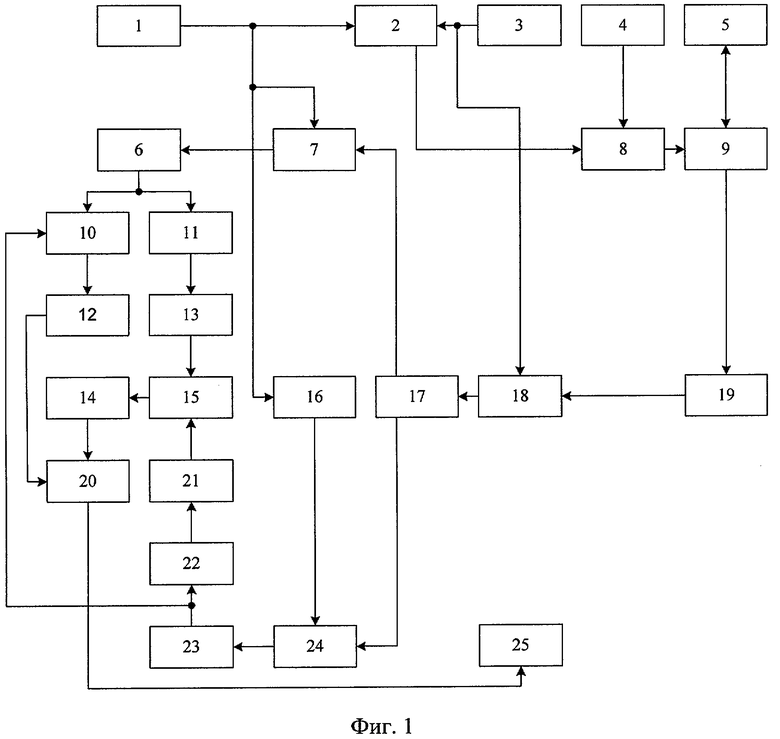
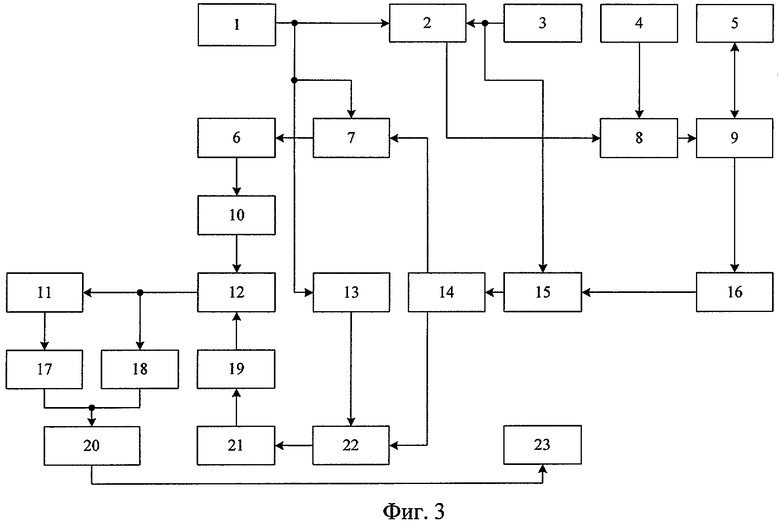
На фиг.3 представлена структурная схема устройства распознавания воздушных целей двухчастотным способом.
Устройство содержит ЗГ 1, 1-й смеситель 2, БГ 3, ИМ 4, антенну 5, 1-й АЦП 6, 1-й ФД 7, УМ 8, АП 9, 1-й квадратор 10, устройство вычисления мгновенного значения модуля разности сигналов 2-х частот (УВМЗМРС) 11, сумматор 12, ФВ 13, УПЧ 14, 2-й смеситель 15, УВЧ 16, устройство усреднения модуля разности сигналов 2-х частот (УУМРС) 17, УВСЗ ЭПР 18, 2-й квадратор 19, УВ ПР 20, 2-й АЦП 21, 2-й ФД 22, УО 23, причем выход ЗГ 1 соединяют с 1-м входом 1-го смесителя 2, с 2-м входом 1-го ФД 7, а также с входом ФВ 13, выход ФВ 13 соединяют с 2-м входом 2-го ФД 22, 2-й вход 1-го смесителя 2 соединяют с выходом БГ 3, выход БГ 3 так же соединяют с 2-м входом 2-го смесителя 15, выход 1-го смесителя 2 соединяют с 1-м входом УМ 8, 2-й вход которого соединяют с выходом ИМ 4, выход УМ 8 соединяют с входом АП 9, вход и выход АП 9 связывают с входом и выходом антенны 5, а выход - с входом УВЧ 16, выход УВЧ 16 соединяют с 1-м входом 2-го смесителя 15, выход которого соединяют с входом УПЧ 14, выход УПЧ 14 соединяют с 1-м входом 1-го ФД 7 и с 1-м входом 2-го ФД 22, выход 1-го ФД 7 соединяют с входом 1-го АЦП 6, а выход 2-го ФД 22 соединяют с входом 2-го АЦП 21, выходы 1-го АЦП 6 и 2-го АЦП 21 соединяют с входами 1-го и 2-го квадраторов 10 и 19, выходы которых соединяют с 1-м и 2-м входами сумматора 12 соответственно, выход сумматора 12 соединяют с входом УВМЗМРС 11 и входом УВСЗ ЭПР 18, выход УВМЗМРС соединяют с входом УУМРС 17, выходы УУМРС 17 и УВСЗ ЭПР 18 соединяют с входом УВ ПР 20, выход УВ ПР 20 соединяют с входом УО 23. Совокупность элементов в составе 1-го и 2-го квадраторов 10 и 19, сумматора 12, УВМЗМРС 11, УУМРС 17, УВСЗЭПР 18, УВ ПР 20 составляют вычислительное устройство.
Устройство распознавания воздушных целей двухчастотным способом работает следующим образом.
ЗГ 1 генерирует непрерывные колебания с частотой fпр, которые подаются на 1-й вход 1-го смесителя 2. На 2-й вход 1-го смесителя 2 поступает сигнал на частоте fгет n с выхода БГ 3, n=1…S-1, где S - число формируемых частот. Частота сигнала с выхода БГ 3 изменяется от импульса к импульсу таким образом, чтобы разнос частот ΔF=fгет n-fгет n+1 оставался постоянным и составлял величину, определяемую из интервала частотной корреляции наибольшей из распознаваемых целей (около 2 МГц). Сигнал на высокой частоте fn=fпр+fгет n с выхода 1-го смесителя 2 поступает на 1-й вход УМ 8, на 2-й вход которого поступает сигнал с выхода ИМ 4. Сигналы с выхода УМ 8 в моменты наличия на 2-м входе УМ 8 модулирующих импульсов (с выхода ИМ 4) усиливаются по мощности, после чего через АП 9 подаются на антенну 5 и излучаются ею в направлении воздушной цели.
Отраженные целью сигналы принимаются антенной 5 и через АП 9 поступают на вход УВЧ 16, полоса пропускания которого позволяет проводить обработку сигналов S частот зондирования. С выхода УВЧ 16 сигналы поступают на 1-й вход 2-го смесителя 15. На 2-й вход 2-го смесителя 15 поступает соответствующий сигнал с выхода БГ 3. На выходе 2-го смесителя 15 формируется сигнал на промежуточной частоте, равной разности частот сигналов, поступивших на 1-й и 2-й входы 2-го смесителя. Выходной сигнал 2-го смесителя 15 поступает на вход УПЧ 14. Усиленный в УПЧ 14 сигнал поступает на 1-е входы ФД 7 и 22, на которых осуществляется квадратурная обработка принятого сигнала, с выходов которых соответствующие квадратурные составляющие сигнала поступают на соответствующие входы АЦП 6 и 21, а с их выходов поступают на соответствующие входы 1-го и 2-го квадраторов 10 и 19, на которых производится возведение в квадрат сигналов косинусной и синусной составляющих соответственно, с выхода 1-го и 2-го квадраторов 10 и 19 сигнал поступает на сумматор 12, с выхода которого на УВМЗМРС 11 и УВСЗ ЭПР 18, с выхода УВМЗМРС 11 мгновенное значение модуля разности подается на УУМРС 17 и далее на УВ ПР 20, на которое подается сигнал и с УВСЗ ЭПР 18, в УВ ПР 20 осуществляется распознавание ВЦ на основе использования характера флюктуации двухчастотного сигнала и далее на УО 22. Значения амплитуд отраженных сигналов на выходах ФД 7 и 22 будут находиться в квадратуре ввиду того, что подаваемые на их 2-е входы опорные сигналы, формируемые ЗГ 1, будут иметь постоянное смещение по фазе на 90°. Это смещение фаз создает ФВ 13, включенный в цепь опорного сигнала 2-го ФД 22. Амплитуды квадратурных составляющих сигналов на выходах ФД 7 и 22 будут определяться величиной ЭПР отдельных отражателей ВЦ и фазовыми различиями сигналов, рассеянных каждым отражателем.
Аналитически это может быть описано следующим образом:




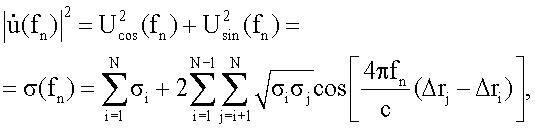
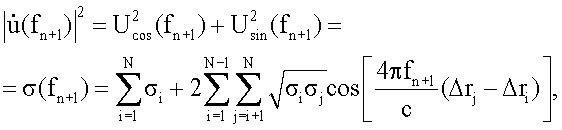
Выражения (3) и (4) описывают амплитуды квадратурных составляющих сигнала на выходах ФД на несущей частоте fn, а (5) и (6), соответственно, на несущей частоте fn+1.
После преобразования квадратурных составляющих сигналов каждой частоты в АЦП 6 и 21 в цифровую форму, в 1-м и 2-м квадраторах 10, 19 и сумматоре 12 вычисляются суммы квадратов квадратурных составляющих сигналов на каждой частоте, которые пропорциональны мгновенным ЭПР цели:
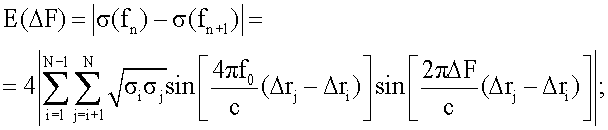
в устройстве 11 вычисляется разность мгновенных значений ЭПР сигналов, разнесенных по частоте на величину ΔF
в устройстве вычисления 18 осуществляется усреднение мгновенного значения ЭПР,
 ,
,
в устройстве 17 вычисляется среднее значение модуля разности сигналов, разнесенных по частоте, за несколько контактов с целью
дальнейшая их обработка для вычисления признака распознавания корреляционным двухчастотным способом [4] производится в УВ ПР 20, в котором вычисляется отношение среднего значения модуля разности сигналов, разнесенных по частоте, к средней ЭПР цели
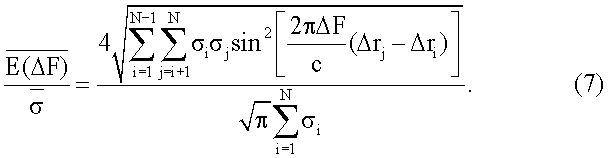
Средние значения параметра E(ΔF) и ЭПР цели вычисляются в динамике полета цели для различных ее реализаций в процессе изменения ракурса, случайных рысканий по курсу, крену и тангажу.
Квадратурная обработка принятых сигналов устраняет эффект «слепой» фазы.
Таким образом, в основе предлагаемого устройства распознавания воздушных целей двухчастотным способом лежит зависимость характера флюктуации ЭПР цели при перестройке частоты зондирующего сигнала от радиального размера цели. Различный характер флюктуации вызван различным разносом локальных центров рассеяния целей в продольном направлении, положение которых определяет фазу рассеянной волны и направление ее прихода. Физическая сущность работы устройства заключается в нахождении взаимосвязи или корреляции амплитуд (мощностей) двух сигналов, разнесенных по частоте на величину ΔF. Чем больше размер цели, тем эта взаимосвязь меньше, несмотря на то что признак может быть получен и при использовании МЧС с постоянным разносом частот ΔF. В этом случае усреднение величин E(ΔF) и σ(f) осуществляется за счет изменения средней несущей частоты зондирующего сигнала f0, что может сократить время на принятие решения о распознаваемой цели.
Для получения удовлетворительного усреднения по совокупности независимых отсчетов достаточно иметь таких отсчетов M≥10. То есть для получения признака распознавания достаточно излучить, например, 10-частотный МЧС при одной реализации цели (в одном обзоре) или получить 10 независимых откликов от цели на двух частотах при различных ее реализациях (при усреднении по обзорам), а также возможно использовать меньшее количество обзоров РЛС при количестве частот в зондирующем сигнале больше 2-3.
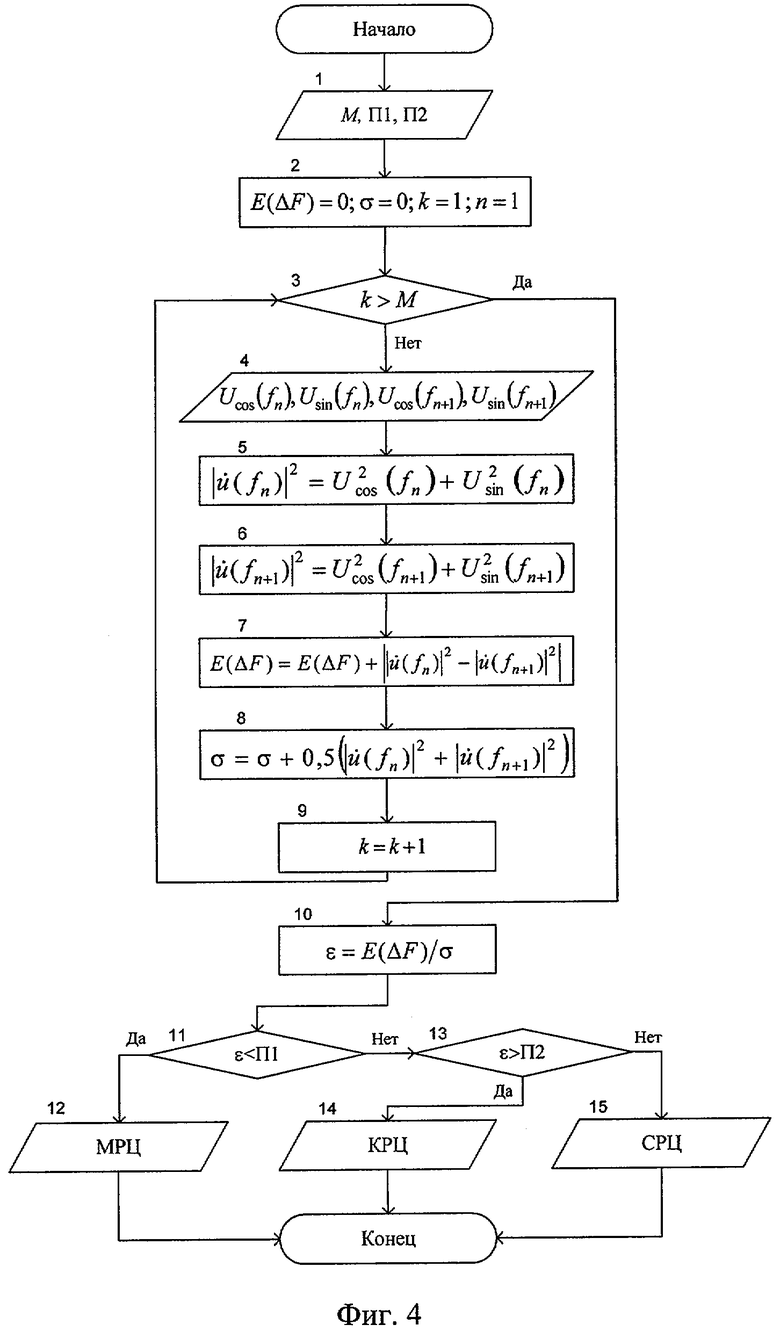
Конструкция блоков и узлов 1, 2, 3, 4, 5, 6, 7, 8, 9, 10, 12, 13, 14, 15, 16, 18, 19, 20, 21, 22, 23 в заявляемом устройстве по сравнению с прототипом не претерпела никаких изменений. Алгоритм обработки квадратурных составляющих сигналов, разнесенных по частоте, при вычислении признака распознавания классов ВЦ корреляционным двухчастотным способом представлен на фиг.4, где П1 и П2 - пороговые значения для классификации целей на три класса (КРЦ, СРЦ и МРЦ). Элементы 17, 18, 19, 20, входящие в состав ВУ, создается на элементах цифровой вычислительной техники. В качестве ВУ можно также использовать специализированный микропроцессор, выполняющий простейшие математические операции [5]. Применение заявляемого устройства так же как и прототипа не требует отдельного радиолокатора станции разведки целей.
Порядок работы предлагаемого устройства следующий. В режиме поиска цели РЛС использует зондирующий сигнал одной несущей частоты. После обнаружения ВЦ РЛС переводится в режим идентификации обнаруженной цели, при этом передатчик формирует зондирующий сигнал на частотах fn и fn+1 (для двухчастотного сигнала n=1) с оптимальным разносом AF со сменой рабочих частот от импульса к импульсу. Отраженный целью сигнал принимается антенной 5 и через АП 9 поступает в приемный канал, где осуществляется его предварительное усиление в УВЧ 16, преобразование на промежуточную частоту в смесителе 15, окончательные усиление и частотная избирательность в УПЧ 14, квадратурная обработка на ФД 7 и 22. После преобразования в цифровую форму в АЦП 6 и 21 коды сигнала, соответствующие квадратурным составляющим, поступают на устройства, входящие в состав ВУ, где в соответствии с алгоритмом (фиг.4) осуществляется возведение в квадрат соответствующих квадратурных составляющих в 1-м и 2-м квадраторах 10 и 19, суммирование квадратов квадратурных составляющих сигналов на каждой частоте в сумматоре 12, вычисление мгновенного значения модуля разности сигналов 2-х частот в 11, после чего вычисляются средние значения модуля разности мощностей сигналов, разнесенных по частоте в 17, и ЭПР цели в 18 за несколько контактов с ней, и находится величина признака распознавания  в 20. Решение о классе ВЦ принимается в результате сравнения полученного отношения с порогами (П1 и П2). Пороговое испытание (аналогичное прототипу) производится в УВ ПР 20 путем сравнения признака распознавания с хранящейся в ПЗУ информацией о порогах распознавания. После принятия решения о классе наблюдаемой цели информация о распознанной цели с УВ ПР 20 выдается на УО 23 (индикатор РЛС или монитор ЭВМ).
в 20. Решение о классе ВЦ принимается в результате сравнения полученного отношения с порогами (П1 и П2). Пороговое испытание (аналогичное прототипу) производится в УВ ПР 20 путем сравнения признака распознавания с хранящейся в ПЗУ информацией о порогах распознавания. После принятия решения о классе наблюдаемой цели информация о распознанной цели с УВ ПР 20 выдается на УО 23 (индикатор РЛС или монитор ЭВМ).
Проверка работоспособности предлагаемого способа определения радиальных размеров ВЦ проводилась методом математического моделирования и в процессе натурного эксперимента.
Моделирование проводилось в метровом диапазоне длин волн на фацетной математической модели, позволяющей получать амплитудно-частотные характеристики (АЧХ) ВЦ на различных ракурсах [6]. То есть при моделировании исследовался корреляционный способ при усреднении признака распознавания за счет изменения несущей частоты. Для получения АЧХ цикл организовывался по несущей частоте ЗС при фиксированных угловых координатах цели θ и ϕ. При этом разнос между смежными частотами ΔF являлся величиной постоянной.
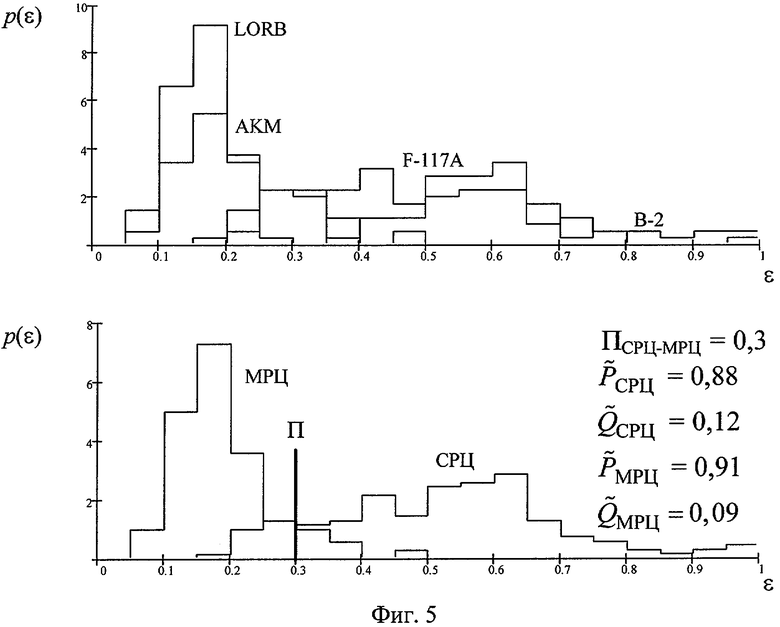
Распознаванию подвергались представители классов СРЦ - стратегический бомбардировщик В-2, ударный истребитель F-117А и МРЦ - крылатая ракета АКМ, головная часть баллистической ракеты LORB.
При проведении математического моделирования задавались фиксированные значения координат θ и ϕ, а цикл организовывался по несущей частоте с разносом (шагом) ΔF=2,5 МГц, выбранном из интервала частотной корреляции большей из распознаваемых целей (B-2), при средней длине волны λ=1,5 м. Количество частот МЧС для осуществления усреднения по совокупности отсчетов составило S=16, что определило диапазон перестройки частоты 37,5 МГц. Расчеты были проведены для горизонтальной поляризации вектора напряженности электрического поля и с шагом сетки фацетной модели d=λ/16.
Гистограммы распределения признака распознавания для всех типов целей и для двух классов (МРЦ и СРЦ) приведены на фиг.5, из которого видна достаточно высокая эффективность принятия правильных решений при объединении распознаваемых целей в два класса.
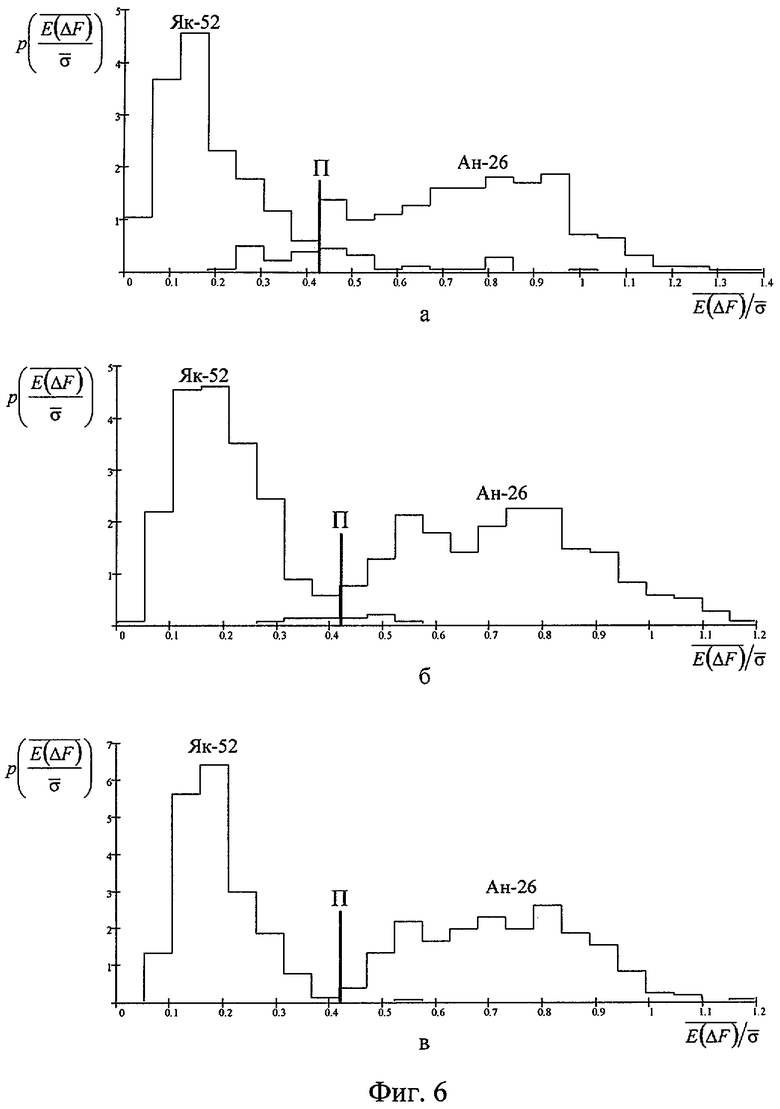
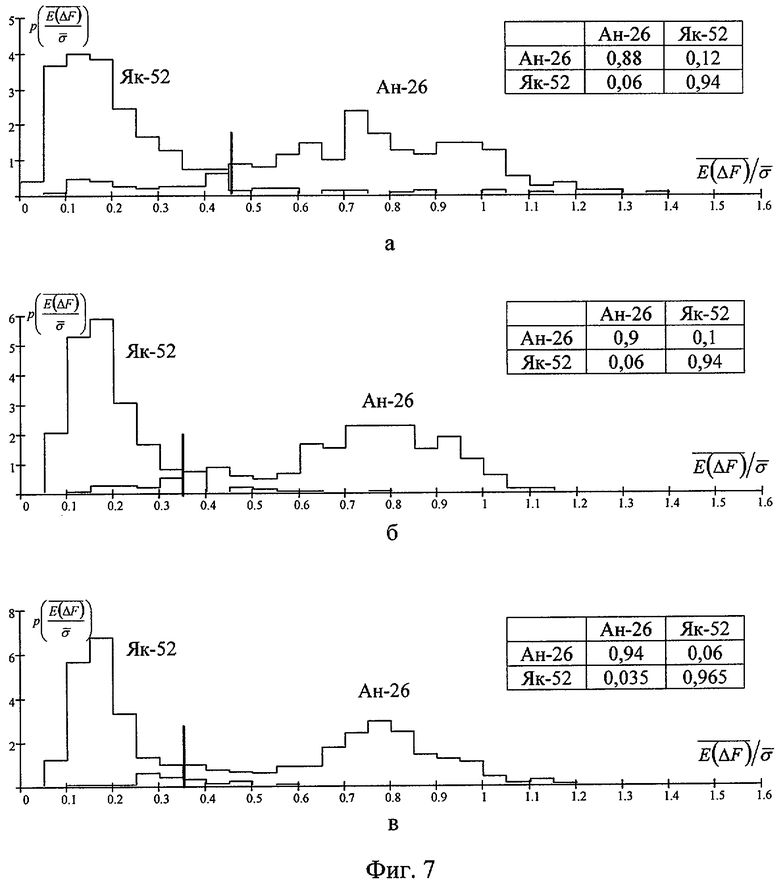
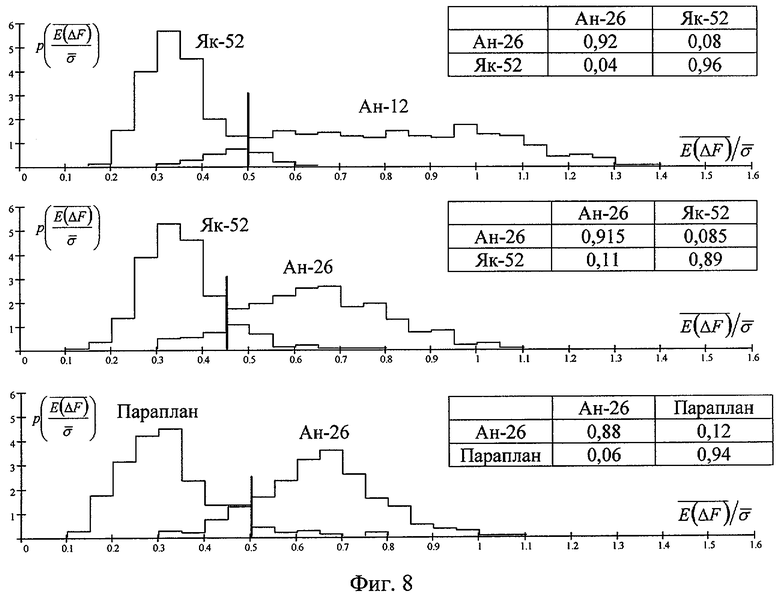
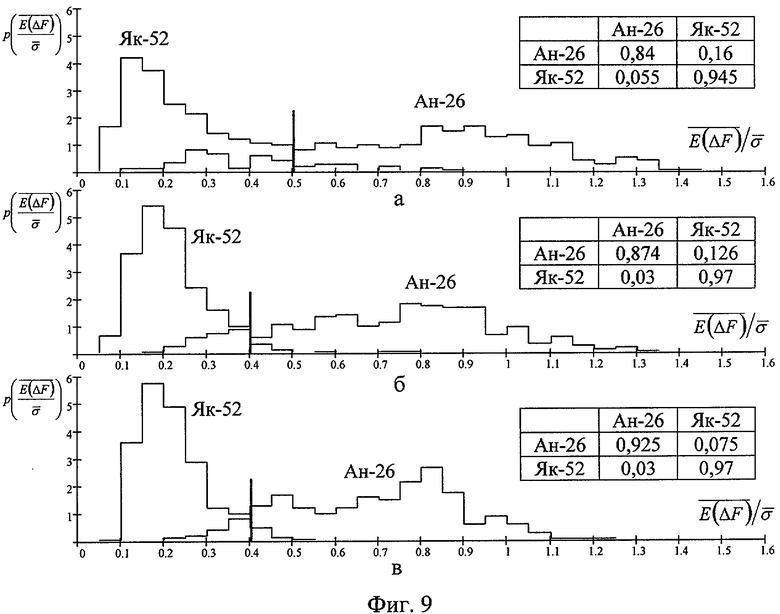
Экспериментальные исследования корреляционного способа распознавания по двум частотам, то есть при усреднении за счет нескольких контактов с целью, проводились по реальным воздушным целям на РЛС ДР 1Л13 «Небо-СВ» [7, 8].
Для обеспечения возможности реализации двухчастотного способа распознавания ВЦ на РЛС 1Л13 была реализована поимпульсная смена двух рабочих частот.
При проведении натурного эксперимента были использованы следующие типы ВЦ: Ан-12, Ан-26, Су-24МР, Як-52 и Параплан.
Методика проведения натурного эксперимента заключалась в следующем:
1. Радиолокационная цель последовательно облучалась двумя узкополосными зондирующими сигналами, несущая частота которых изменялась от импульса к импульсу с необходимым разносом частот.
2. При каждом контакте с целью ручным способом фиксировалась величина напряжения цифровой АРУ.
3. Квадратурные составляющие отраженных сигналов каждой частоты после преобразования в цифровой вид записывались с помощью устройства сопряжения на ПЭВМ, на которой проводилась их дальнейшая обработка:
сжатие сигналов согласно 13-позиционному коду Баркера;
обработка полученных сигналов в каждом обзоре в соответствии с режимами работы РЛС (амплитудный режим без накопления, с некогерентным накоплением, режим СДЦ, когерентное накопление);
вычисление признака распознавания  за определенное количество обзоров РЛС;
за определенное количество обзоров РЛС;
построение статистических распределений признака;
определение показателей качества радиолокационного распознавания.
Результаты обработки экспериментальных данных в различных режимах обработки принятых сигналов представлены на фиг.6-9.
Таким образом, результаты проведенного эксперимента подтверждают возможность распознавания классов ВЦ, отличающихся радиальными размерами, при использовании корреляционного двухчастотного способа распознавания в различных режимах работы РЛС.
СПИСОК ИСПОЛЬЗУЕМОЙ ЛИТЕРАТУРЫ
1. Патент №2095823 РФ. Радиолокационное устройство распознавания воздушных целей/Ермоленко В.П., Коваленков Н.Н., Митрофанов Д.Г., Юдин В.А. // Открытия, изобретения, 1997, бюл. №31 (аналог).
2. Патент №2144681 РФ. Устройство распознавания воздушных целей двухчастотным способом / Бондарев Л.А., Жигунов П.А., Васильченко О.В., Гуреев А.К., Чагрин А.С. // Открытия, изобретения, 2000, бюл. №2 (прототип).
3. Теоретические основы радиолокации. / Под ред. Ширмана Я.Д. Учебное пособие для вузов. М., Советское радио, 1970, с.560.
4. Юдин В.А., Панов Д.В., Караваев С.А., Мурашкин А.В. Оценка радиальных размеров воздушных целей с использованием двух- и многочастотных зондирующих сигналов. Труды Российского научно-технического общества радиотехники, электроники и связи им. А.С. Попова. Серия: Цифровая обработка сигналов и ее применение. Вып. Х - 1. М., "Инсвязьиздат", 2008, с.348-351.
5. Дроздов Е.А. и др. Многопрограммные цифровые вычислительные машины. М., Высш. шк., 1985, с.243-247.
6. Юдин В.А., Панов Д.В., Караваев С.А. Математическое моделирование признака распознавания классов воздушных целей многочастотным способом в метровом диапазоне волн. М., ЦВНИ МО РФ. Инв. №В6865. Сер.Б. Вып.84, 2008. Деп. в ЦСИФ МО РФ.
7. Юдин В.А. Натурные экспериментальные исследования признака распознавания воздушных целей двухчастотным способом. М., ЦВНИ МО РФ. Инв. №Б4681. Сер.Б. Вып.58, 2002. Деп. в ЦСИФ МО РФ.
8. Юдин В.А., Панов Д.В., Краснов П.В., Горбачев А.В. Результаты натурного эксперимента в штатных режимах РЛС 1Л13 - некогерентного накопления и СДЦ. М., ЦВНИ МО РФ. Сер.А. Вып.3 (92), 2006. Деп. в ЦСИФ МО РФ.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО РАСПОЗНАВАНИЯ ВОЗДУШНЫХ ЦЕЛЕЙ ДВУХЧАСТОТНЫМ СПОСОБОМ | 1999 |
|
RU2144681C1 |
| УСТРОЙСТВО РАСПОЗНАВАНИЯ ВОЗДУШНЫХ ЦЕЛЕЙ ДВУХЧАСТОТНЫМ СПОСОБОМ | 1996 |
|
RU2114443C1 |
| УСТРОЙСТВО СЕЛЕКЦИИ ДВИЖУЩИХСЯ ЦЕЛЕЙ ДЛЯ РЕЖИМА ПЕРЕСТРОЙКИ ЧАСТОТЫ ОТ ИМПУЛЬСА К ИМПУЛЬСУ | 2014 |
|
RU2541504C1 |
| РАДИОЛОКАЦИОННАЯ СТАНЦИЯ С ПЕРЕСТРОЙКОЙ ЧАСТОТЫ, ИНВЕРСНЫМ СИНТЕЗИРОВАНИЕМ АПЕРТУРЫ И ДВУХУРОВНЕВЫМ НЕЙРОСЕТЕВЫМ РАСПОЗНАВАНИЕМ ОБЪЕКТОВ ПО СОВОКУПНОСТИ ПРИЗНАКОВ | 2009 |
|
RU2412451C1 |
| ИМПУЛЬСНО-ДОПЛЕРОВСКАЯ РАДИОЛОКАЦИОННАЯ СТАНЦИЯ | 1997 |
|
RU2109306C1 |
| ИМПУЛЬСНО-ДОПЛЕРОВСКАЯ РЛС | 1995 |
|
RU2084921C1 |
| РАДИОЛОКАЦИОННАЯ СТАНЦИЯ С СИНТЕЗИРОВАННОЙ АПЕРТУРОЙ | 1995 |
|
RU2099744C1 |
| РАДИОЛОКАЦИОННАЯ СТАНЦИЯ С ИНВЕРСНЫМ СИНТЕЗИРОВАНИЕМ АПЕРТУРЫ И МНОГОЧАСТОТНЫМ ЗОНДИРУЮЩИМ СИГНАЛОМ | 1999 |
|
RU2152626C1 |
| УСТРОЙСТВО ЛОГИЧЕСКОГО РАСПОЗНАВАНИЯ ВОЗДУШНЫХ ОБЪЕКТОВ | 1998 |
|
RU2149420C1 |
| РЛС распознавания целей | 2019 |
|
RU2720355C1 |
Изобретение может быть использовано в импульсных и импульсно-доплеровских радиолокационных станциях (РЛС) разведки и сопровождения целей, позволяющих производить электронную перестройку частоты зондирующего сигнала от импульса к импульсу. Сущность изобретения состоит в том, что заявленное устройство содержит задающий генератор, два фазовых детектора, два смесителя, блок гетеродинов, импульсный модулятор, антенну, два аналого-цифровых преобразователя, усилитель мощности, антенный переключатель, два квадратора, устройство вычисления мгновенного значения модуля разности сигналов двух частот, сумматор, фазовращатель, усилитель промежуточной частоты, устройство вычисления среднего значения эффективной поверхности рассеяния, усилитель высокой частоты, устройство усреднения разности сигналов двух частот, устройство вычисления признака распознавания, устройство отображения, определенным образом соединенные между собой. Достигаемый технический результат изобретения - возможность распознавания классов воздушных целей, отличающихся радиальными размерами, при использовании корреляционного двухчастотного метода распознавания в различных режимах работы радиолокационных станций. 9 ил.
Устройство распознавания воздушных целей двухчастотным способом, содержащее задающий генератор, выход которого, являющийся выходом опорного сигнала, соединен с первым входом первого смесителя, с вторым входом первого фазового детектора, с фазовращателем, включенным в цепь опорного сигнала второго фазового детектора по его второму входу, содержащее также блок гетеродинов, соединенный своим выходом с вторыми входами первого и второго смесителей, усилитель мощности, соединенный своими первым и вторым входами с выходом первого смесителя и выходом импульсного модулятора, соответственно, антенну, соединенную входом-выходом с выходом-входом антенного переключателя, усилитель высокой частоты, второй смеситель, усилитель промежуточной частоты, при этом усилитель мощности, антенный переключатель, усилитель высокой частоты, второй смеситель, усилитель промежуточной частоты соединены последовательно, соединенные последовательно первый фазовый детектор, первый аналого-цифровой преобразователь, первый квадратор, соединенные последовательно второй фазовый детектор, второй аналого-цифровой преобразователь, второй квадратор, причем сигнал усилителя промежуточной частоты поступает на первые входы первого и второго фазовых детекторов, содержащее также сумматор, соединенный своими первым и вторым входами с выходами первого и второго квадраторов, а выходом - с входом устройства вычисления среднего значения эффективной поверхности рассеяния, выход которого соединен с вторым входом устройства вычисления признака распознавания, а выход устройства вычисления признака распознавания соединен с входом устройства отображения, отличающееся тем, что дополнительно введены устройство вычисления мгновенного значения модуля разности сигналов двух частот и устройство усреднения модуля разности сигналов двух частот, причем выход сумматора соединен с входом устройства вычисления мгновенного значения модуля разности сигналов двух частот, выход устройства вычисления мгновенного значения модуля разности сигналов двух частот соединен с входом устройства усреднения модуля разности сигналов двух частот, первый вход устройства вычисления признака распознавания соединен с выходом устройства усреднения модуля разности сигналов двух частот, при этом устройство вычисления признака распознавания предназначено для вычисления отношения среднего значения модуля разности сигналов, разнесенных по частоте, к среднему значению эффективной поверхности рассеяния, которое затем сравнивается с порогом распознавания для принятия решения о классе распознаваемой цели.
| УСТРОЙСТВО РАСПОЗНАВАНИЯ ВОЗДУШНЫХ ЦЕЛЕЙ ДВУХЧАСТОТНЫМ СПОСОБОМ | 1999 |
|
RU2144681C1 |
| УСТРОЙСТВО РАСПОЗНАВАНИЯ ВОЗДУШНЫХ ЦЕЛЕЙ ДВУХЧАСТОТНЫМ СПОСОБОМ | 1996 |
|
RU2114443C1 |
| ТЕЛЕГРАФНЫЙ АППАРАТ ТИПА МОРЗЕ | 1927 |
|
SU6916A1 |
| US 5070335 A, 03.12.1993 | |||
| US 4673940 A, 16.06.1987 | |||
| JP 4113293 A, 14.04.1992 | |||
| US 2005087649 A1, 28.04.2005. | |||

