Изобретение относится к системе обработки изображения, использующей аналоговый джойстик. Более конкретно, настоящее изобретение относится к системе обработки изображения, в которой аналоговый джойстик, дающий управляющий сигнал в соответствии с направлением наклона или степенью наклона рычага, подключен к процессору изображения, который генерирует на основе программных видеоданных изображение, отображаемое на мониторе, таком как ЭЛТ и пр. , при этом видеоданные, т.е. изображение изменяют в соответствии с воздействием оператора на рычаг.
Уровень техники
Обычный контроллер 1 игровой машины, изображенный на фиг. 1, содержит прямоугольный корпус 1a, селекторный переключатель 3 для выбора содержания игры, стартовый переключатель 2, задающий начало игры, переключатель 4 поперечного направления для обозначения направления движения игрового символа во время игры и два переключателя действия 5a и 5b для выбора или указания действия символа, причем все переключатели размещают на верхней поверхности корпуса 1a.
В контроллере 1 игровой машины, изображенном на фиг. 2, кроме селекторного переключателя 3, стартового переключателя 2 и переключателя 4 поперечного движения, на поверхности корпуса 1a' предусмотрены четыре переключателя 5a, 5b, 5c и 5d действия, кроме того, предусмотрены два переключателя 6a и 6b на задней поверхности корпуса 1a' в положениях, доступных для указательных пальцев или средних пальцев обеих рук, когда ладони обеих рук находятся в контакте с левой и правой боковыми сторонами корпуса 1a'.
В контроллере 1, изображенном на фиг. 3, переключатель поперечного движения 4a и переключатели 5a и 5b действия, и переключатель 4b поперечного движения и переключатели 5c и 5d действия расположены на левом и правом корпусах 1a и 1b соответственно.
В изображенных на фиг. 1-3 контроллерах, известных из предшествующего уровня техники, сигнал направления для указания направления, в котором должно двигаться изображение на мониторе, выдают с помощью переключателя 4 или 4a (и 4b) поперечного движения. Но в обычном переключателе поперечного движения контакты переключателя предусмотрены для четырех направлений: вверх (Север), вниз (Юг), влево (Запад) и вправо (Восток) на экране монитора, то есть в четырех направлениях "вперед", "назад", "влево" и "вправо", если смотреть на контроллер в плане сверху, и в соответствии с замыканием конкретного контакта переключателей может выдаваться сигнал направления, указывающий одно из этих четырех направлений. Переключатели поперечного перемещения, предусматриваемые в обычных контроллерах, представляют собой некоторый вид цифровых джойстиков. Обеспечиваемое при этом преимущество заключается в том, что сигнал направления "вверх" и сигнал направления "вправо" можно получать одновременно, если оператор одновременно нажимает кнопку указания направления вверх и кнопку указания направления направо. Однако проблема состоит в том, что оператор не может указать произвольное направление, отличное от определенных направлений.
С другой стороны, в публикации Японии N 5-19925 от 25 мая 1993 г., например, предложен аналоговый джойстик, который содержит рычаг и выдает сигнал направления, определяемый направлением наклона рычага. Аналоговый джойстик использует переменные поворотные резисторы и может выдавать сигнал направления наклона рычага, а также сигнал, соответствующий степени наклона рычага. Но в таком аналоговом джойстике в отличие от цифрового джойстика невозможно указать одновременно два направления, и поэтому с точки зрения содержания игры здесь возникает неудобство.
Рассмотрим использование аналогового джойстика, известного из патентной публикации Японии N 5-19925, для случая игры в гонки. Предполагается, что если рычаг наклоняют вверх (вперед), то это соответствует "нажатию на акселератор", а если рычаг наклоняют вниз (назад), то это соответствует нажатию на тормоз, если рычаг наклоняют вправо, то это соответствует состоянию "руль вправо", и если рычаг наклоняют влево, то - состоянию "руль влево". В этом случае, если использовать обычный аналоговый джойстик, то когда рычаг наклоняется вправо или влево, в момент, когда он отклонен вверх (вперед) до максимальной степени наклона, рычаг направляется внутренним краем направляющего кольца (внутренний край определяет круговое отверстие 111 корпуса 11 в патентной публикации Японии N 5-19925), и поэтому рычаг естественным образом отводится вправо назад. Поэтому, когда акселератор нажат в максимальной степени, то если руль поворачивается вправо или влево, степень нажатия на акселератор естественным образом снижается. То есть проблема в том, что руль нельзя повернуть вправо или влево, когда акселератор нажат полностью.
Эта проблема обусловлена тем, что форма направляющего кольца, используемого в качестве направляющей аналогового джойстика, известного из предшествующего уровня техники, имеет постоянную круговую форму.
Сущность изобретения
Основной задачей данного изобретения является создание новой системы обработки изображений, обеспечивающей соответствующее изменение диапазона наклона аналогового джойстика.
Задачей изобретения является также создание системы обработки изображения, в которой требуемое направление можно надежно устанавливать с использованием аналогового джойстика и соответствующим образом изменять диапазон наклона рычага аналогового джойстика.
Система обработки изображения, содержащая процессор изображения (10), который формулирует видеоданные для отображения на мониторе, и аналоговый джойстик (45), который модифицирует видеоданные, согласно изобретению содержит рычаг, наклоняемый в некотором диапазоне наклона при воздействии оператором на рычаг и находящийся в заданном состоянии в отсутствие воздействия оператором на рычаг; устройство вывода данных джойстика (444X, 444Y, 442) для вывода данных джойстика, указывающих наклоненное положение рычага; и устройство (11, 16) вывода видеоданных для вывода видеоданных на основе данных джойстика, причем средство вывода данных джойстика включает в себя первое корректирующее устройство (S2, S4, S5) для коррекции данных джойстика в определенной области, заданной в части упомянутого диапазона наклона.
Если диапазон наклона рычага восьмиугольной формы, например, определен направляющим кольцом, то упомянутую определенную область задают, например, как область, представляющую собой разницу между восьмиугольной формой и другой формой - круговой, прямоугольной и пр. В этой определенной области устройство вывода данных джойстика не выводит данные джойстика, определенные главным образом наклоненным положением рычага, а выводит данные джойстика, скорректированные первым корректирующим устройством. Поэтому в указанной определенной области устройство вывода видеоданных выводит видеоданные на основе скорректированных данных джойстика.
В соответствии с настоящим изобретением, поскольку данные джойстика корректируют в определенной области в пределах диапазона физического наклона рычага аналогового джойстика, становится возможным задать такую форму диапазона надежного наклона рычага, которая будет отличаться от формы диапазона физического наклона, и, следовательно, можно устанавливать наиболее соответствующий диапазон надежного наклона сообразно применению, например содержанию игры и т.п.
В данном изобретении при помощи задания определенной области в качестве мертвой зоны можно предотвратить нежелательное изменение изображения на мониторе из-за вибрации или нежелательного движения руки оператора изображения.
Если мертвую зону устанавливают во взаимосвязи с нейтральным положением рычага, то можно решить проблему отклонений данных в нейтральном положении. То есть можно решить проблему, заключающуюся в невозможности обнуления в нейтральном положении рычага из-за трения или по аналогичной причине. То есть становится возможным корректное выставление "0".
Согласно первому варианту система обработки изображения содержит процессор изображения (10) для генерирования данных изображения, отображаемого на мониторе (30) во взаимосвязи с программой обработки изображения, хранящейся на носителе (20) программы, и аналоговый джойстик (45), причем джойстик включает в себя рычаг (474), выполненный с возможностью наклона в пределах некоторого диапазона наклонов при воздействии на него оператором и находящийся в предварительно определенном состоянии, указывающем центр, в отсутствие воздействия оператора на рычаг, причем система также содержит средство (444X, 444Y, 442) выдачи данных степени наклона, предназначенное для выдачи данных степени наклона в соответствии со степенью наклона указанного рычага, упомянутый процессор изображения (10) выполнен с возможностью выполнения первой операции определения (S11, S12, S16, S17, S22, S41) для определения на основе упомянутых данных степени наклона, находится ли указанный рычаг в первой мертвой зоне, включающей в себя центр, а также возможностью выполнения первой операции коррекции (S13, S18, S23, S42) для коррекции данных степени наклона относительно данных центра, при условии определения, что указанный рычаг находится в первой мертвой зоне, с возможностью выполнения второй операции коррекции (S14, S15, S19, S20, S24, S43) для коррекции данных степени наклона на основе степени наклона, равной расстоянию от центра до мертвой зоны, при условии определения, что рычаг находится вне упомянутой первой мертвой зоны, и с возможностью выполнения операции выдачи (S144) для выдачи видеоданных на основе данных степени наклона, скорректированных посредством первой операции коррекции, когда указанный рычаг находится в упомянутой первой мертвой зоне, либо на основе данных степени наклона, скорректированных вторым средством коррекции, когда рычаг находится вне первой мертвой зоны.
Кроме того, упомянутая программа (20) обработки изображения включает в себя предварительно определенное уравнение вычисления, а упомянутый процессор изображения выполняет операцию вычисления соответственно указанному предварительно определенному уравнению вычисления при выполнении упомянутой второй операции коррекции (S14, S15, S19, S20, S24, S43), причем в ней средство выдачи данных степени наклона включает в себя первое средство выдачи данных (444X, 442) для выдачи степени наклона в направлении оси X, указывающей наклон рычага в направлении оси X, и второе средство выдачи данных (444Y, 442) для выдачи степени наклона в направлении оси Y, указывающей наклон рычага в направлении оси Y, а предварительно определенное уравнение для вычислений включает в себя уравнение вычитания (S15, S20), при этом упомянутый процессор изображения (10) вычитает предварительно определенные значения из степени наклона в направлении X и степени наклона в направлении Y соответственно, если упомянутый рычаг находится вне упомянутой первой мертвой зоны.
В системе джойстик (45) включает в себя направляющий узел (486), который образован вокруг рычага и ограничивает физически диапазон возможных наклонов, имеющий предварительно определенную форму, когда рычаг (474) приводится в контакт с внутренней периферийной частью (488) направляющего узла, при этом процессор изображения (10) обеспечивает выполнение второй операции определения (S52, S61, S63, S65, S67) для определения на основе данных степени наклона, находится ли рычаг в пределах второй мертвой зоны, которая находится вблизи зоны максимума диапазона возможных наклонов и имеет предварительно определенную форму, обеспечивает выполнение третьей операции коррекции (S14, S15, S19, S20, S24, S43) для коррекции данных степени наклона, выданных средством выдачи данных степени наклона, когда определено, что рычаг находится вне первой мертвой зоны и что рычаг находится вне второй мертвой зоны, и обеспечивает выполнение четвертой операции коррекции (S53, S62, S64, S66, S68) для коррекции данных степени наклона согласно предварительно определенным данным степени наклона, если определено, что рычаг находится во второй мертвой зоне.
В операции выдачи данных видеоданные выдаются на основе данных степени наклона, скорректированных согласно третьей операции коррекции, когда определено, что рычаг находится вне первой мертвой зоны и второй мертвой зоны, или на основе данных степени наклона, которые скорректированы согласно четвертой операции коррекции, когда определено, что рычаг находится вне первой мертвой зоны и в пределах второй мертвой зоны.
В системе вторая мертвая зона сформирована внешним контуром, определенным формой внутренней периферии (488) направляющего угла (486), и внутренним контуром, имеющим произвольную форму, отличающуюся от формы внутренней периферии (488), причем внутренняя периферия направляющего узла может иметь многоугольную форму (фиг. 38), число углов которой больше пяти, причем внутренний контур второй мертвой зоны представляет собой круг, вписанный в многоугольную форму или внутренняя периферия направляющего узла может иметь многоугольную форму, число углов которой больше пяти, причем внутренний контур второй мертвой зоны имеет другую многоугольную форму, углы которой контактируют с предварительно определенными углами упомянутой многоугольной формы.
Внутренняя периферия направляющего узла может иметь также восьмиугольную форму, а упомянутая другая многоугольная форма представляет собой прямоугольник, четыре угла которого контактируют с каждым вторым углом упомянутой восьмиугольной формы.
Система обработки изображения (второй вариант изобретения) содержит процессор изображения (10) для генерирования данных изображения, отображаемого на мониторе (30) во взаимосвязи с программой обработки изображения, хранящейся на носителе программы (20), и аналоговый джойстик (45), причем джойстик включает в себя рычаг (474), выполненный с возможностью наклона в пределах некоторого диапазона наклонов при воздействии на него оператором, причем система также содержит средство выдачи данных степени наклона (444X, 444Y, 442), предназначенное для выдачи данных степени наклона в соответствии со степенью наклона указанного рычага, при этом упомянутый джойстик (45) включает в себя направляющий узел (486), который образован вокруг рычага и ограничивает физически диапазон возможных наклонов, имеющий предварительно определенную форму, когда рычаг приводится в контакт с внутренней периферийной частью (488) направляющего узла, а процессор изображения (10) обеспечивает выполнение первой операции определения (S11, S12, S16, S17, S22, S41) для определения на основе данных степени наклона, находится ли рычаг в пределах первой мертвой зона, включающей центр, выполнение второй операции определения (S11, S12, S16, S17, S22, S41) для определения на основе данных степени наклона, находится ли рычаг в пределах второй мертвой зоны, которая находится вблизи зоны максимума диапазона возможных наклонов и имеет предварительно определенную форму, и обеспечивает выполнение первой операции коррекции (S12, S18, S23, S42) для коррекции данных степени наклона для центрирования данных, указывающих центр, когда первым средством определения определено, что упомянутый рычаг находится в пределах первой мертвой зоны, с одновременным обеспечением выполнения второй операции коррекции (S14, S15, S19, S20, S24, S43) для коррекции данных степени наклона, выданных средством выдачи данных степени наклона, когда посредством первой операции определения и второй операции определения определено, что рычаг находится вне первой мертвой зоны и что рычаг находится вне второй мертвой зоны.
Кроме того, процессор изображения (10) обеспечивает выполнение третьей операции коррекции (S53, S62, S64, S66, S68) для коррекции данных степени наклона согласно предварительно определенным данным степени наклона, если посредством второй операции определения определено, что рычаг находится во второй мертвой зоне, и обеспечивает выполнение операции выдачи данных (S114) для выдачи видеоданных на основе данных степени наклона, скорректированных согласно первой операции коррекции, когда определено, что рычаг находится вне второй мертвой зоны, или на основе данных степени наклона, которые скорректированы согласно второй операции коррекции, когда определено, что рычаг находится в пределах второй мертвой зоны. В этой системе вторая мертвая зона сформирована внешним контуром, определенным формой внутренней периферии (488) направляющего узла (486), и внутренним контуром, имеющим произвольную форму, отличающуюся от формы внутренней периферии (488), внутренняя периферия направляющего узла имеет многоугольную форму, число углов которой больше пяти, причем внутренний контур второй мертвой зоны представляет собой круг, вписанный в многоугольную форму, или внутренняя периферия направляющего узла имеет многоугольную форму, число углов которой больше пяти, причем внутренний контур второй мертвой зоны имеет другую многоугольную форму, углы которой контактируют с предварительно определенными углами упомянутой многоугольной формы.
Внутренняя периферия направляющего узла также может иметь восьмиугольную форму, а упомянутая другая многоугольная форма представляет собой прямоугольник, четыре угла которого контактируют с каждым вторым углом упомянутой восьмиугольной формы.
Способ функционирования системы обработки изображения, содержащей процессор изображения (10) для генерирования данных изображения, отображаемого на мониторе (30), и рычаг (474) аналогового джойстика, выполнен с возможностью наклона в пределах некоторого диапазона наклонов при воздействии на него оператором и находящийся в предварительно определенном состоянии, указывающем центр, в отсутствие воздействия оператора на рычаг. Способ включает этапы генерирования (S1) данных степени наклона в соответствии со степенью наклона рычага джойстика, определения (S11, S12, S16, S17, S22, S41) процессором изображения (10) на основе данных степени наклона, находится ли рычаг в первой мертвой зоне, включающей в себя центр опорной системы координат, выполнения (S12, S18, S23, S42) первой операции коррекции процессором изображения для коррекции данных степени наклона, если определено, что рычаг находится в первой мертвой зоне, выполнения (S14, S15, S19, S20, S24, S43) второй операции коррекции процессором изображения для коррекции данных степени наклона на основе расстояния от центра до первой мертвой зоны, если определено, что рычаг находится вне первой мертвой зоны, и выдачи (S114) видеоданных на основе данных степени наклона, скорректированных согласно первой операции коррекции, когда рычаг находится в первой мертвой зоне, или на основе данных степени наклона, которые скорректированы согласно второй операции коррекции, когда определено, что рычаг находится вне указанной мертвой зоны.
Способ дополнительно включает этапы определения (S11, S12, S16, S18, S22, S41) на основе данных степени наклона, находится ли рычаг во второй мертвой зоне, которая находится поблизости от зоны максимума диапазона наклонов и имеет предварительно определенную форму. Выполнения (S53, S62, S64, S66, S68) третьей операции коррекции процессором изображения для коррекции данных степени наклона согласно предварительно определенным данным степени наклона, если определено, что рычаг находится в пределах второй мертвой зоны, и выдачи видеоданных на основе данных степени наклона, скорректированных согласно второй операции коррекции, когда рычаг находится вне первой мертвой зоны и второй мертвой зоны, или на основе данных степени наклона, которые скорректированы согласно третьей операции коррекции, когда рычаг находится вне первой мертвой зоны и в пределах второй мертвой зоны.
Кроме того, способ дополнительно включает этап выполнения (S53, S62, S64, S66, S68) четвертой операции коррекции процессором изображения для коррекции данных степени наклона согласно предварительно определенному уравнению, если определено, что рычаг находится вне второй мертвой зоны, и выдачи видеоданных на основе данных степени изображения, которые скорректированы в четвертой операции коррекции, если рычаг находится вне второй мертвой зоны.
Указанные выше задачи, а также прочие задачи, признаки, аспекты и преимущества настоящего изобретения станут более очевидными из изложенного ниже описания данного изобретения в совокупности с прилагаемыми чертежами.
Краткое описание чертежей
Фиг. 1 - изображение первого аналога изобретения.
Фиг. 2 - изображение второго аналога изобретения.
Фиг. 3 - изображение третьего аналога изобретения.
Фиг. 4 - изображение возможного варианта осуществления в соответствии с настоящим изобретением.
Фиг. 5 - подробная блок-схема процессора изображения для варианта осуществления по фиг. 4.
Фиг. 6 - изображение схемы распределения памяти ЦП для варианта осуществления согласно фиг. 5; показана внешняя память на картридже и ЗУПВ с оперативной записью.
Фиг. 7 - блок-схема, подробно изображающая схему управления контроллером для варианта осуществления по фиг. 5.
Фиг. 8 - изображение схемы распределения памяти ЗУПВ в схеме по фиг. 7.
Фиг. 9 - пространственное представление контроллера на виде сверху для варианта осуществления по фиг. 4.
Фиг. 10 - пространственное представление контроллера на виде снизу для варианта осуществления по фиг. 4.
Фиг. 11 - пространственное представление узла аналогового джойстика, используемого в данном варианте осуществления.
Фиг. 12 - пространственное представление основных компонентов узла по фиг. 11.
Фиг. 13 - фрагменты пространственного представления основных компонентов узла по фиг. 11.
Фиг. 14 - поперечное сечение основных компонентов узла по фиг. 11.
Фиг. 15 - иллюстрация состояния, в котором рычаг направляют направляющим кольцом.
Фиг. 16 - подробная блок-схема контроллера и устройства расширения.
Фиг. 17 - изображение данных аналогового джойстика и соответствующих кнопок контроллера.
Фиг. 18 - блок-схема последовательности операций ЦП для варианта осуществления по фиг. 5.
Фиг. 19 - блок-схема последовательности операций схемы управления шиной варианта осуществления по фиг. 5.
Фиг. 20 - блок-схема последовательности операций схемы управления контроллером для варианта осуществления по фиг. 5.
Фиг. 21 - блок-схема последовательности операций схемы контроллера для варианта осуществления по фиг. 5.
Фиг. 22 - схематичное представление данных передачи/приема схемы управления при передаче команды "0" от схемы управления контроллером.
Фиг. 23 - схематичное представление данных передачи/приема схемы управления при передаче команды "1" от схемы управления контроллером.
Фиг. 24 - схематичное представление данных передачи/приема схемы управления при передаче команды "2" от схемы управления контроллером.
Фиг. 25 - схематичное представление данных приема/передачи схемы управления при передаче команды "3" от схемы управления контроллером.
Фиг. 26 - схематичное представление данных приема/передачи схемы управления при передаче команды "255" от схемы управления контроллером.
Фиг. 27 - блок-схема, иллюстрирующая операцию установки кнопки в исходное состояние X-счетчика и Y-счетчика.
Фиг. 28 - блок-схема, иллюстрирующая операцию установки в исходное состояние X-счетчика и Y-счетчика при включении источника питания.
Фиг. 29 - схематичное изображение соотношения между физическими координатами рычага и экраном монитора.
Фиг. 30 - схематичное изображение соотношения между физическими координатами рычага и экраном монитора, когда выполняют операцию установки в исходное состояние в каком-либо положении, отличном от центра рычага.
Фиг. 31 - блок-схема последовательности операций процедуры прерывания реле времени для коррекции данных аналогового джойстика для варианта осуществления по фиг. 5.
Фиг. 32 - схематичное изображение способа коррекции центра.
Фиг. 33 - блок-схема последовательности операций способа.
Фиг. 34 - схематичное изображение другого способа коррекции центра.
Фиг. 35 - блок-схема последовательности операций способа.
Фиг. 36 - схематичное изображение еще одного способа коррекции центра.
Фиг. 37 - блок-схема последовательности операций способа.
Фиг. 38 - схематичное изображение способа периферийной коррекции.
Фиг. 39 - блок-схема последовательности операций способа.
Фиг. 40 - схематичное изображение другого способа периферийной коррекции.
Фиг. 41 - блок-схема последовательности операций способа.
Предпочтительные варианты осуществления изобретения
Ниже описан вариант осуществления, в котором аналоговый джойстик используется в видеоигровой приставке, которая отображает игровой символ на экране монитора в соответствии с программой игры, хранимой в запоминающем устройстве (полупроводниковая память, КД-ПЗУ и пр.), и управляет игровым символом. Следует отметить, что данное изобретение может использоваться в системах обработки изображений, содержащих процессор изображения, который формирует видеоданные изображения, подлежащего отображению на мониторе, в соответствии с программой, и аналоговый джойстик.
На фиг. 4 приведено схематичное представление процессора изображения 10 и контроллера 40 в соответствии с одним из вариантов осуществления настоящего изобретения. Процессор изображения 10 снабжен соединителем для подключения картриджа в верхней части процессора 10 изображения; причем картридж 20 вставляется в соединитель.
Картридж 20 снабжен печатной платой, которую подключают к соединителю 13 картриджа для обеспечения электрического соединения с процессором 10 изображения и передачи или приема данных между процессором 10 изображения и картриджем 20. Внешнее ПЗУ, хранящее данные программы и др. и запоминающее устройство с оперативной записью и считыванием, например ЗУПВ для хранения данных, обработанных процессором изображения 10, при необходимости устанавливают на печатной плате. Схема распределения внешней памяти (фиг. 6) содержит область 201 видеоданных, в которой хранят видеоданные, необходимые для процессора изображений 10 для формирования сигнала изображения, и область 202 программных данных, в которой хранят данные программы, необходимые для ЦП 11, чтобы выполнять заданные операции.
Контроллерные соединители 181-184 для соединения контроллеров 40 предусмотрены на передней поверхности процессора изображения 10. Посредством соединения контроллеров 40 с контроллерными соединителями 181-184 процессор изображения 10 электрически соединяют с контроллерами 40, и поэтому можно передавать или принимать данные между процессором изображения 10 и контроллерами 40.
Контроллеры 40 соединяют с контроллерными соединителями 181- 184 процессора изображения 10 посредством соединительных гнезд 41, предусмотренных на процессоре изображения 10, и кабелей 42. Каждый из контроллеров 40 выполнен в форме, обеспечивающей удобство манипулирования ими обеими руками или одной рукой, а на внешней стороне корпуса контроллера 40 размещены кнопки, обеспечивающие генерирование электрических сигналов при их нажатии, и управляющий элемент (рычаг аналогового джойстика), установленный в вертикальном положении.
Электрические схемы и механические узлы, находящиеся в процессоре изображения 10 и корпусе контроллера 40, будут подробно описаны ниже.
В соответствии с фиг. 5 картридж 20, монитор 30 (телевизионный приемник, ЭЛТ или пр.) и контроллеры 40 соединены с процессором изображения 10. Процессор изображения 10 содержит центральный процессор (ЦП) 11, управляющий процедурой обработки изображений в соответствии с программой, хранящейся во внешней памяти, находящейся в картридже 20. ЦП 11 имеет область памяти, изображенную на фиг. 6, содержащую области 201 и 202 для внешней памяти в картридже 20, а также область памяти 141 для ЗУПВ 14 с оперативной записью (ОЗ-ЗУПВ). К ЦП 11 подключена схема 12 управления шиной.
Схема 12 управления шиной подключена к соединителю 13 картриджа, ОЗ-ЗУПВ 14, схеме 15 генерации музыкального сигнала и схеме 16 генерации сигнала изображения с помощью шины, представляющей собой параллельную сигнальную линию, и к схеме 17 управления контроллером посредством последовательной сигнальной линии. Схема 12 управления шиной принимает команду, выдаваемую из ЦП 11 посредством шины, в виде сигнала в параллельном коде и преобразует сигнал в параллельном коде в сигнал в последовательном коде для выдачи команды в виде последовательного сигнала на схему 17 управления контроллером. Схема 12 управления шиной преобразует данные последовательного сигнала, введенного схемой 17 управления контроллером, в параллельный сигнал для ввода его в шину. Данные, введенные в шину, подвергают заданной обработке либо центральным процессором 11, либо запоминают в ОЗ-ЗУПВ 14.
Картридж 20 соединяют с соединителем 13 картриджа, а внешнее ПЗУ и память с оперативной записью и считыванием в картридже и схема 12 управления шиной соединяются между собой адресной шиной и информационной шиной для обеспечения обмена данными между ними.
ОЗ-ЗУПВ 14 представляет собой запоминающее устройство для временного хранения данных, подлежащих обработке ЦП 11. ОЗ-ЗУПВ 14 соединено со схемой 12 управления шиной посредством адресной шины и информационной шины, обеспечивающей считывание данных из ОЗ-ЗУПВ 14 или запись данных в ОЗ-ЗУПВ 14 через схему 12 управления шиной. Схема распределения памяти ОЗ-ЗУПВ 14 содержит область данных контроллера или область 141 данных клавиатуры управления в соответствии с изображением области ОЗ-ЗУПВ фиг. 6.
Схема 15 формулирования музыкального сигнала обеспечивает формирование музыкального сигнала посредством схемы 12 управления шиной в соответствии с командами ЦП 11.
Схема 16 формирования видеосигнала обеспечивает формирование видеосигнала посредством схемы 12 управления шиной в соответствии с командами ЦП 11.
Схема 17 управления контроллером соединена со схемой 12 управления шиной и с контроллерными соединителями 181-184 для обмена данными в последовательном коде.
Конкретная конструкция схемы 17 управления контроллером будет описана со ссылкой на блок-схему, изображенную на фиг. 7.
Схема 171 управления переносом данных содержит параллельно-последовательную схему преобразования и последовательно-параллельную схему преобразования и принимает последовательные данные от схемы 12 управления шиной посредством последовательно-параллельной схемы преобразования и передает последовательные данные к схеме 12 управления шиной посредством параллельно-последовательной схемы 43 преобразования. Кроме того, схема 171 управления переносом данных подключена к схеме передачи 172, схеме приема 173 и ЗУПВ 174 посредством шины. Поэтому схема 171 управления переносом данных передает данные к ЗУПВ 174 или принимает данные от ЗУПВ 174 как параллельные данные. Соответственно, схема 171 управления переносом данных считывает данные ЗУПВ 174 для передачи их к схеме 12 управления шиной и записывает данные, принятые от схемы 12 управления шиной, в ЗУПВ по командам со схемы 12 управления шиной.
Схема передачи 174 преобразует параллельный сигнал из шины в последовательный сигнал для осуществления передачи данных. Сигнальные линии СН1-СН4 соответственно подключены к контроллерным соединителям 181-184 для передачи последовательных данных к соответствующим контроллерам 40.
Схема приема 173 принимает последовательный сигнал от контроллеров 40 и выводит принятые данные в шину в виде параллельного сигнала. Сигнальные линии СН1-СН4 соответственно подключены к контроллерным соединителям 181-184 для приема последовательных данных от контроллеров.
ЗУПВ 174 подключено к схеме 171 управления переносом данных через шину и обеспечивает ввод и вывод данных в виде параллельного сигнала. Данные, хранимые в ЗУПВ 174, будут описаны с помощью схемы распределения памяти, изображенной на фиг. 6. Команду для первого канала запоминают в области 1741, а данные передачи и данные приема для первого канала запоминают в области 1742. В области 1743 запоминают команду для второго канала, а данные передачи и данные приема для второго канала запоминают в области 1744. Команду для третьего канала запоминают в области 1745, а в области 1746 запоминают данные передачи и данные приема для третьего канала. В области 1747 запоминают команду для четвертого канала, а в области 1748 запоминают данные передачи и данные приема для четвертого канала.
Описанное выполнение схемы 171 управления переносом данных обеспечивает передачу заданных команд от схемы 172 передачи или хранения данных, принятых схемой приема 173, в ЗУПВ 174.
Каждый из контроллерных соединителей 181-184 подключен к каждой из схем 17 управления контроллером и разъемно соединен с соединительным гнездом 41 контроллера 40. Когда контроллерные соединители 181-184 подключены к соединительным гнездам 41 контроллера 40, контроллеры 40 и контроллерные соединители 181-184 соответственно электрически соединены друг с другом, в результате чего обеспечивается возможность обмена данными между ними.
Как показано на фиг. 9 и 10, контроллер 40 в этом варианте осуществления содержит корпус 401, состоящий из верхней половины и нижней половины. На левом и правом концах корпуса 401 левая рукоятка 402L и правая рукоятка 402R соответственно выполнены таким образом, что они выступают в направлении передней стороны. В промежуточном положении между левой рукояткой 402L и правой рукояткой 402R центральная рукоятка 402C выполнена так, что она выступает в направлении передней стороны. Переключатель 403 указания поперечного движения, выполненный в виде цифрового джойстика, размещен на поверхности корпуса 401 вблизи конца основания левой рукоятки 402L. Переключатели 404A, 404B, 404C, 404D, 404E и 404F указания действия, которые указывают шесть видов действия, соответственно размещены на поверхности корпуса 401 вблизи конца основания правой рукоятки 402R.
Аналоговый джойстик 45, который может указывать все направления в пределах 360 градусов, выполнен на корпусе 401 вблизи конца основания центральной рукоятки 402C. Приблизительно в центральном положении корпуса 401 выполнен стартовый переключатель 405 для указания начала игры. Стартовый переключатель 405 расположен приблизительно в центре области, окруженной переключателями 403 и 404A-404F и аналоговым джойстиком 45.
Кроме того, пара переключателей 406L и 406R боковой поверхности размещены на задней поверхности корпуса 401, и переключатель 407 нижней поверхности размещен приблизительно в центре нижней половины вблизи конца основания центральной рукоятки 402C.
Задняя поверхность нижней половины проходит в направлении нижней поверхности, и на ее конце выполнен узел 408 с отверстием. Внутри узла 408 с отверстием предусмотрен соединитель (не показан) для подключения изображенного на фиг. 4 картриджа 50 расширения. В узле 408 предусмотрен рычаг 409 для выгрузки картриджа 50, введенного в узел 408 с отверстием. Кроме этого на стороне, противоположной рычагу узла 408 с отверстием, в которое помещают упомянутый картридж 50 расширения, выполнен вырез 410, облегчающий выемку картриджа 50 расширения при его выгрузке с помощью рычага 409.
Со ссылками на фиг. 11-15 будет приведено подробное описание аналогового джойстика 45, выполненного, как показано на фиг. 11. Узел аналогового джойстика помещен между верхней и нижней половинами корпуса 401. Узел джойстика содержит корпус, образованный кожухом 451 и крышкой 452, причем внутри корпуса размещен внутренний кожух 453.
Как показано на фиг. 12 и 13, внутренний кожух 453 содержит чашеобразное углубление 454, выполненное в центре внутреннего кожуха 453; имеются две пары опорных пластин 455a и 455b, 456a и 456b вокруг углубления 454 с угловым интервалом в 90 градусов; и полукруглые опоры 457a и 457b, 458a и 458b выполнены на опорных пластинах 455a и 455b, 456a и 456b соответственно. Опоры 457a и 457b или 458a и 458b размещены на одной и той же осевой линии, и оси опор 457a и 457b и 458a и 458b имеют одинаковый уровень высоты и пересекаются под прямым углом. Колеса 459 и 62, имеющие валы вращения, пересекающиеся под прямым углом, опираются с возможностью вращения на боковую поверхность внутреннего кожуха 453, а зубчатые колеса 461 единообразно выполнены на соответствующих колесах 459 и 460.
Узел аналогового джойстика также содержит выполненные с возможностью поворота (качания) элементы 462 и 463. Один поворотный элемент 462 сформирован дугообразным элементом, имеющим удлиненное отверстие 464, вытянутое в продольном направлении дугообразного элемента, а опорные оси 465a и 465b выполнены на обоих концах поворотного элемента 462. Концевые части 467a и 467b осей, соответственно имеющие плоские поверхности 466a и 466b, выходят из опорных осей 465a и 465b, а секторное зубчатое колесо 468 предусмотрено на одном конце 476b оси. Другой поворотный элемент 463 отличается от поворотного элемента 462 тем, что поворотный элемент 463 выполнен в виде дугообразного элемента с радиусом кривизны, меньше радиуса кривизны поворотного элемента 462; в остальном поворотный элемент 463 выполнен аналогично или одинаково с поворотным элементом 462. Позиция 469 обозначает длинное отверстие, позиции 470a и 470b обозначают опорные оси, 471a и 471b обозначают плоские поверхности, позиции 472a и 472b - конец штанги и позиция 473 - секторное зубчатое колесо.
Опорные оси 465a и 465b, 470a и 470b отдельно вводят в два комплекта опор 457a и 457b, 458a и 458b внутреннего кожуха 453, и поэтому пара поворотных элементов 462 и 463 может поддерживаться с возможностью свободного качания, причем поворотные элементы 462 и 463 располагают таким образом, что продольные направления удлиненных отверстий 464 и 469 пересекаются под прямым углом и перекрываются с некоторым промежутком или зазором. В паре поворотных элементов 462 и 463, таким образом прикрепленных к внутреннему кожуху 453, секторные зубчатые колеса 468 и 469 зацепляют упомянутые зубчатые колеса 461. Соответствующие упомянутые плоские поверхности 466a и 466b, 471a и 471b находятся в одной и той же горизонтальной плоскости в нейтральном положении рычага 474 (описывается ниже).
Как показано на фиг. 13, рычаг 474 имеет выступы 475, которые выступают в направлениях внешних радиусов на одном конце рычага 474, шаровую часть 476 в средней части рычага 474 и соединительную часть 477 на другом конце рычага 474. На шаровой части 476 выполнены пазы 478, которые проходят в поперечном направлении в положениях, разнесенных на 180o. Диаметр рычага 474 не превышает поперечный (короткий) размер удлиненных отверстий 464 и 469 в поворотных элементах 462 и 463. Диаметр рычага 474 предпочтительно выбран как размер, при котором рычаг 474 может быть вставлен со скольжением в удлиненные отверстия 464 и 469 без их колебания. Затем, одна концевая часть рычага 474 проходит через удлиненные отверстия 464 и 469, а выступы 475 входят в удлиненное отверстие 464 нижней стороны поворотного элемента 462. Поэтому выступы 475 рычага 474 выходят в направлении, которое под прямым углом пересекается с продольным направлением удлиненного отверстия 469 верхнего поворотного элемента 463, прикрепляемого к внутреннему кожуху 453, и поэтому, если рычаг 474 оттягивается вверх, то верхний поворотный элемент 463 не позволяет выступам 475 проскальзывать вверх.
Механическая конструкция в сборе, изображенная на фиг. 12, размещена в наружном кожухе 451, изображенном на фиг. 11. При этом внутренний кожух прикрепляется к внешнему кожуху 451 соответствующим средством, таким как винты (не показаны).
Как показано на фиг. 13, на внутреннем кожухе 453 предусмотрены фотопрерыватели 479 и 480, которые расположены против двух колес 459 и 460. Фотопрерыватели 479 и 480 соответственно содержат светоизлучающие элементы и светочувствительные элементы (не показаны), при этом свет, излучаемый светоизлучающими элементами, воспринимается светочувствительными элементами через прорези 481 и 482, соответственно выполненные на колесах 459 и 460. Поэтому фотопрерыватели 479 и 480 соответственно обнаруживают прорези 481 и 482 и в ответ на это формируют импульсные сигналы в соответствии с вращением колес 459 и 460.
Кроме этого уровень высоты установки поворотных осей (опорных осей 465 и 470) поворотных элементов 462 и 463 совпадает с высотой расположения центра шаровой части 476 рычага 474. Кроме того, во внешнем кожухе 451 установлена печатная плата (не показана), с которой светочувствительные элементы, содержащиеся в фотопрерывателях 479 и 480, электрически соединены с печатными схемами платы.
Как показано на фиг. 14, кольцо с пазом 484 опирается на плоские поверхности 466 и 471, выполненные на паре поворотных элементов 462 и 463, а спиральная пружина 485 размещена над кольцом с пазом 484. Кольцо с пазом 484 является примером поджимающего вниз элемента, причем в нейтральном положении рычага 474 нижняя поверхность кольца 484 занимает горизонтальное положение и приводится в поверхностный контакт с плоскими поверхностями 466 и 471.
Как показано на фиг. 14, направляющее кольцо 486 прикреплено к крышке 452, а в центральной части направляющего кольца 486 выполнено круговое отверстие 487. Направляющее кольцо 486 также содержит направляющую стенку 488, которая является уклоном, поднимающимся от внутренней периферии, определяющей отверстие 487, к внешней периферии направляющего кольца 486. То есть направляющая стенка 488 имеет конусообразную форму. Направляющая стенка 488 имеет внешнюю кромку 491, которая имеет восьмиугольную форму, как изображено на фиг. 10.
Диаметр отверстия 487 подбирают таким, чтобы он по размеру был одинаковым или приблизительно одинаковым с диаметром поверхности внешней периферии шаровой части 476 рычага 474. Поэтому, как показано на фиг. 9, внутренняя кромка, определяющая отверстие 487, контактирует с шаровой частью 476 рычага 474, и поэтому рычаг 474 опирается на шаровую часть 476 и отверстие 487 таким образом, что рычаг 474 можно повернуть или наклонить в любом направлении. Круговые выступы 489 выполнены в двух положениях, разнесенных на 180o на внутренней кромке, определяющей отверстие 487 направляющего кольца 486 таким образом, что выступы 489 выходят в направлении внутреннего радиуса отверстия 487 и входят в пазы 478, выполненные в поперечном направлении шаровой части 476. Поэтому рычаг 474 можно поворачивать вокруг оси выступов 489, но рычаг 474 не может вращаться вокруг оси самого рычага 474. Поэтому пазы 478 шаровой части 476 и выступы 489 не дают рычагу 474 вращаться вокруг своей оси.
Когда крышка 452 прикреплена к кожуху 451, пружина 490 находится между кольцом с пазом 484 и крышкой 452 и сжата ими. Поэтому плоские поверхности 466 и 471 пары поворотных элементов 462 и 463 всегда сжаты усилием пружины 490 посредством кольца с пазом 484, вследствие чего пара поворотных элементов 462 и 463 всегда упруго смещена и занимает такое положение, при котором оба элемента 462 и 463 не наклонены в каком-либо направлении, и поэтому рычаг 474 занимает вертикальное положение, то есть находится в положении, в котором он упруго смещен в свое нейтральное положение.
Рычаг 474 снабжен ручкой управления 492, которая прикреплена к рычагу 474 посредством соединительной части 477. На верхней поверхности ручки управления 492 выполнено углубление 493 для размещения пальца руки.
В описанном выше узле аналогового джойстика, в соответствии с направлением наклона и углом наклона рычага 474, поворотные элементы 462 и/или 463 поворачиваются, и поэтому колеса 459 и/или 460 вращаются в соответствии с углом наклона поворотных элементов 462 и/или 463, вследствие чего выдаются импульсы в соответствии со степенью поворота колес 459 и/или 463; эти импульсы используют в качестве координатных сигналов в направлениях по оси X и Y.
Далее следует подробное описание направляющего кольца 486. Как указывалось выше, направляющее кольцо 486 содержит направляющую стенку 488, имеющую восьмиугольную наружную кромку 491, если смотреть на направляющее кольцо 484 сверху, как показано на фиг. 15. Соответствующие углы восьмиугольной наружной кромки 491 действуют как углубления, в которые входит рычаг 474, как показано на фиг. 15. В данном варианте осуществления показано, что упомянутые углы соответствуют восьми положениям с интервалом 45o: верхнее (Север), нижнее (Юг), левое (Запад), правое (Восток), центральное, между верхним и левым (Северо-Запад), центральное, между верхним и правым (Северо-Восток), центральное, между нижним и левым (Юго-Запад) и центральное, между нижним и правым (Юго-Восток). Что касается точки N, указывающей направление вверх (Север) и показанной на фиг. 15, то направляющие стенки 488a и 488b, между которыми находится точка N, сходятся в точке N. То есть обе стенки 488a и 488b пересекаются в точке N. Поэтому, если рычаг 474 наклонен к точке N, то он перемещается вдоль направляющих стенок 488a и 488b, заключающих между собой точку N; то есть рычаг 474 направляется направляющими стенками 488a и 488b, и в конечном счете устанавливается в точке N. Поэтому, когда подвижный символ (не показан) на мониторе (не показан) должен двигаться вверх, например "прямо вперед", то рычаг 474 может быть наклонен к точке N. То есть, когда подвижный символ должен перемещаться вперед, если рычаг 474 наклоняется в направлении вблизи точки N, то рычаг 474 ограничивается в точке N направляющими стенками 488a и 488b, прилегающими к точке N, и поэтому только при сохранении этого состояния можно надежно перемещать подвижный символ прямо вперед.
В качестве способа определения поворота колес 459 и 460 выше был описан вариант с использованием фотопрерывателей 479, взаимодействующих с прорезями 481 и 482. Можно также использовать способ, в котором на каждом из колес 459 и 460 выполняют множество проводящих элементов и путем электрического детектирования проводящих элементов можно определять поворот каждого из колес 459 и 460.
Далее со ссылками на фиг. 16 описан контроллер 40, подключенный к соединителю 181.
Контроллеры 40, подключенные к указанным контроллерным соединителям 182-184, являются теми же, что и контроллер 40, подключенный к контроллерному соединителю 181, и поэтому соответствующее описание не приводится.
Соединительные гнезда 41 соединены с контроллерными соединителями 181-184 соответственно и обеспечивают вывод данных, передаваемых от процессора изображения 10 на схему преобразования 43.
Схема преобразования 43 передает/принимает данные схемы 17 управления контроллером, содержащейся в процессоре изображения 10, по кабелю 42 в виде сигнала последовательного кода. Более конкретно, схема преобразования 43 передает последовательные данные, направленные от схемы управления 17 контроллером к схеме приема 441 в схеме контроллера 44, в качестве последовательного сигнала, и принимает последовательный сигнал от схемы передачи 445 в схеме контроллера 44, и выводит последовательный сигнал к схеме управления 17 контроллером по кабелю 42.
Схема 44 контроллера содержит схему приема 441, схему управления 442, схему детектирования 443 сигнала переключения, счетчик 444, схему передачи 445 и схему управления 446 портом координатной ручки. Схема передачи 445 преобразует параллельный сигнал, выведенный от схемы управления 442, в последовательный сигнал для вывода в схему преобразования 43. Схема приема 441 преобразует последовательный сигнал, поступивший от схемы преобразования 43, в параллельный сигнал для вывода в схему управления 442.
Схема управления 442 принимает данные, выдаваемые из процессора изображения 10, когда в него введен параллельный сигнал от схемы приема 441, и выполняет заданные операции исходя из принятых данных. Схема управления 442 дает команду схеме детектирования 443 сигнала переключения детектировать сигнал переключения и принимает от схемы детектирования 443 сигнала переключения данные, указывающие, какая кнопка нажата. Затем схема управления 442 дает счетчику 444 команду вывести данные и получает данные X-счетчика 444X и Y-счетчика 444Y. Схема управления 442 также соединена со схемой управления 446 портом джойстика по адресной шине и шине данных; и посредством вывода данных команд на схему управления 446 портом джойстика схема управления 442 может управлять устройством 50 расширения и принимать данные, полученные от устройства 50 расширения.
Схема детектирования 443 сигнала переключения получает сигналы переключения от кнопок 403-407, детектирует одновременное нажатие множества заданных кнопок и передает сигнал установки в исходное состояние на схему 448 установки в исходное состояние. Схема детектирования 443 сигнала переключения также выдает сигналы переключения на схему управления 442.
Схема 444 счетчика содержит два счетчика. X-счетчик 444X считает сигнал детектирования (импульсный сигнал), выдаваемый фотопрерывателем 479 оси X в джойстике 45, в результате чего можно определить, насколько рычаг 474 наклонен в направлении оси X. Y-счетчик 444Y считает импульсные сигналы, выдаваемые фотопрерывателем 480 оси Y джойстика 45, в результате чего можно определить, насколько рычаг или его управляющая часть наклонены в направлении оси Y. Схема 444 счетчика выдает значения, подсчитанные X-счетчиком 444X и Y-счетчиком 444Y, на схему управления 442 по команде от схемы управления 442.
Схема управления 446 портом джойстика соединена с устройством расширения 50 посредством адресной шины и информационной шины через схему управления 442 и соединитель 46 порта джойстика. Поэтому схема управления 442 и устройство расширения 50 связаны между собой адресной шиной и информационной шиной и соответственно устройство расширения 50 может управляться командами от ЦП 11 процессора изображения 10.
Каждая из кнопок 403-407 генерирует электрический сигнал в ответ на нажатие оператором на верхнюю часть клавиши, выступающей из контроллера 40. В этом варианте осуществления изобретения при нажатии клавиши напряжение изменяется с высокого уровня на низкий уровень. Это изменение напряжения детектируется схемой детектирования 443 сигнала переключения.
Фиг. 17 иллюстрирует данные контроллера 40. Данные, формируемые контроллером 40, представлены четырьмя байтами: В, A, G, START, вверх, вниз, влево, вправо, JSRST, 0 (в данном варианте осуществления не используется), L, R, E, D, C, F, X-координата и Y-координата, и каждый бит представлен как "0" или "1". "В" соответствует кнопке 404B и принимает значение "1", когда кнопка 404B нажата оператором, и "0", когда кнопка 404B не нажата. Аналогично, A, G, START, вверх, вниз, влево, вправо, L, R, E, J, C и F соответствуют кнопкам 404A, 407, 405, 403, 406L, 406R, 404E, 404D, 404C и 404F соответственно. JSRST принимает значение "1", когда оператор одновременно нажимает кнопки 405, 406L и 406R, и принимает значение "0", когда оператор не нажимает эти кнопки одновременно. Координаты X и Y являются данными значений счета X-счетчика 444X и Y-счетчика 444Y.
Примером выполнения устройства 50 расширения в виде платы резервной памяти 50 представлен на фиг. 16. Плата резервной памяти 50 содержит ЗУПВ 51 с оперативной записью и считыванием, обеспечивающее запись и считывание данных с нужного адреса посредством указания адреса, и батарею 52, обеспечивающую резервное питание, необходимое для хранения данных ЗУПВ 51. Также, посредством подключения платы резервной памяти 50 к соединителю 46 порта джойстика контроллера 40, ЗУПВ 51 электрически соединено со схемой управления 446 портом джойстика для обеспечения обмена данными между ЗУПВ 51 и контроллером 40. Передача/прием данных описаны подробно ниже.
В описанном выше варианте осуществления плата резервной памяти 50 представлена на примере устройства расширения; однако в качестве устройства расширения можно использовать и иное устройство, если оно при своем функционировании может обеспечивать передачу данных или прием данных.
Ниже рассмотрены передача и прием данных между процессором 10 и контроллером 40.
Сначала со ссылками на блок-схему на фиг. 18 при использовании ЦП 11 процессора изображения 10 будет описана обработка изображений. На этапе S111 ЦП 11 выполняет первоначальную установку на основе исходных значений (не изображены), запомненных в области 202 программных данных, изображенной на фиг. 6. Затем, на этапе S112 ЦП 11 передает данные клавишной панели контроллера по команде запроса данных контроллера, запомненной в области 202 данных программы, на схему 12 управления шиной. На этапе S113 ЦП 11 выполняет заданную операцию обработки изображения на основе программы, запомненной в области 202 программных данных, и на основе данных, запомненных в области 201 данных изображения, показанной на фиг. 6. Также во время этапа S113, выполняемого центральным процессором 11, схема управления 12 шиной выполняет этапы S121-S124. Затем на этапе S114 ЦП 11 выводит видеоданные на основе данных клавиатуры управления или данных контроллера, запоминаемых в данных клавиатуры управления или области 141 данных контроллера, изображенной на фиг. 6. После этапа S114 ЦП 11 повторно выполняет этапы S112-S114.
Работа схемы управления 12 шиной описывается со ссылками на фиг. 19. На этапе S121 схема управления 12 шиной определяет, дана ли посредством ЦП 11 команда запроса данных контроллера (команда запроса для данных переключения контроллера 40 или данные устройства 50 расширения). Если команда запроса данных контроллера не выдана, схема управления 12 шиной ожидает команду. Если команда запроса данных контроллера выдана, то процедура обработки переходит на этап S122, на котором схема управления 12 шиной выводит команду для считывания данных контроллера 40 в схему управления 17 контроллером. Затем, на этапе S123 схема управления 12 шиной определяет, принимает ли схема управления 17 контроллером данные контроллера 40 и запоминает ли их ЗУПВ 174. Схема управления 12 шиной находится в состоянии ожидания на этапе S123, если схема управления 17 контроллером не принимает данные от контроллера 40 и в ЗУПВ 174 не происходит запоминания данных. Если данные от контроллера 40 принимаются в схеме управления 17 контроллером и запоминаются в ЗУПВ 174, то процедура обработки переходит на этап S124. На этапе S124 схема управления 12 шиной переносит данные контроллера 40, запоминаемые в ЗУПВ 174 схемы управления 17 контроллером, в ЗУПВ 14. Схема управления 12 шиной возвращается на этап S121 после переноса данных в ЗУПВ 14 и повторно выполняет этапы S121-S124.
В блок-схемах на фиг. 18 и 19 приведен пример, когда ЦП 11 обрабатывает данные, запомненные в ОЗ-ЗУПВ 14 после переноса данных от ЗУПВ 174 к ОЗ-ЗУПВ 14 схемой управления 12 шиной; но данные ЗУПВ 174 можно напрямую обрабатывать центральным процессором 11 посредством схемы управления 12 шиной.
Операция переноса данных далее описывается со ссылками на блок-схему на фиг. 20, иллюстрирующей функционирование схемы 17 управления контроллером. На этапе S171 определяется, ожидается ли запись данных от схемы управления 12 шиной. Если состояние ожидания отсутствует, то схема управления 171 переносом данных ожидает записи данных со схемы управления 12 шиной. Если имеются данные, которые подлежат записи со схемы управления 12 шиной, то на следующем этапе S172 схема управления 171 переносом данных запоминает команды и/или данные (далее - просто "команды/данные") для каналов с первого по четвертый в ЗУПВ 174.
На этапе S173 команды/данные первого канала передаются на контроллер 40, подключенный к соединителю 181. Схема управления 442 контроллера 40 выполняет заданную операцию на основе команд/данных и выдает подлежащие передаче данные на процессор 10 изображения. Содержание данных приводится ниже при описании работы схемы управления 442. На этапе S174 схема управления 171 переносом данных принимает данные, выдаваемые из схемы управления 442, и запоминает данные в ЗУПВ 174.
На этапе S175 команды/данные второго канала передаются на контроллер 40, подключенный к соединителю 182. Схема управления 442 контроллера 40 выполняет заданную операцию на основе команд/данных и выводит подлежащие передаче данные на процессор 10 изображения. Этап S176 аналогичен этапу S174.
На этапе S177 команды/данные третьего канала передаются на контроллер 40, подключенный к соединителю 183. Схема управления 442 контроллера 40 выполняет заданную операцию на основе команд/данных и выводит подлежащие передаче данные на процессор 10 изображения. Этап S178 аналогичен этапу S174.
На этапе S179 команды/данные четвертого канала передаются на контроллер 40, подключенный к соединителю 184. Схема управления 442 контроллера 40 выполняет заданную операцию на основе команд/данных и выводит подлежащие передаче данные на процессор 10 изображения. Этап S180 аналогичен этапу S174.
На следующем этапе, S181, схема управления 171 переносом данных переносит данные, принятые на этапах S174, S176, S178 и S180, вместе на схему управления 12 шиной.
На фиг. 21 показана блок-схема, иллюстрирующая работу схемы 44 контроллера. Сначала на этапе S402 определяется, введена ли команда в схему управления 442 от процессора 10 изображения. Если команда не введена, схема управления 442 ожидает команду. Если команда введена, процедура обработки переходит к следующему этапу S404, на котором определяется, является ли команда, введенная в схему управления 442, командой запроса статуса (команда "0"). Если это не команда "0", обработка переходит на этап S408, а если это команда "0", - то на этап S406 для выполнения обработки передачи статуса. Это действие подробно описывается со ссылками на фиг. 22, которая подробно изображает обмен данными между процессором изображения и контроллером 40 в случае, когда ЦП 11 выдает команду "0".
Если схема управления 442 контроллера 40 принимает данные команды "0", сформированной 1 байтом (8 битов), она передает TYPE L (1 байт), TYPE H (1 байт) и статус. TYPE L и TYPE H являются данными, представляющими вид функций, которые имеют средство, подключенное к соединителю 46 порта джойстика, и представляют собой данные, записанные в устройстве расширения 50. Поэтому процессор 10 изображения может распознать, какой вид устройства расширения 50 подключен к контроллеру 40. Статус характеризуется данными, указывающими, подключено ли устройство расширения 50 к порту джойстика, подключено ли устройство расширения 50 после установки в исходное состояние.
На этапе S408 определяется, является введенная команда командой запроса данных клавиатуры (команда "1"). Если она не является командой "1", то обработка переходит на этап S412, а если она является командой "1", то на этап S410, где выполняется обработка передачи данных клавиатуры. Более подробно эта обработка описывается со ссылками на фиг. 23, где изображены данные передачи/приема между процессором 10 изображения и контроллером 40 в том случае, когда ЦП 11 выдает команду "1".
Если схема управления 442 контроллера 40 принимает данные команды "1", сформированной 1 байтом (8 битов), четырнадцатью (14) данными переключения (16 битов) B, A, G, START, вверх, вниз, влево, вправо, L, R, E, D, C и F, и JSRST (1 бит) и данными счетчиков 444X и 444Y (16 битов), то в результате передачи этих данных на процессор 10 изображения процессор изображения сможет распознавать, каким образом оператор управляет контроллером 40.
На этапе S412 определяется, является ли введенная команда командой запроса записи соединителя расширения (команда "2"). Если она не является командой "2", то обработка переходит на S416, а если она является командой "2", - на этап S414, на котором выполняется обработка записи соединителя расширения. Конкретное действие будет описано со ссылками на фиг. 24, где подробно изображены данные передачи/приема между процессором 10 изображения и контроллером 40 в том случае, когда ЦП 11 выдает команду "2".
Если схема управления 442 контроллера 40 принимает данные команды "2", состоящие из 1 байта (8 битов), адреса H, представляющего самые старшие разряды адреса (8 битов), адреса L, представляющего самые младшие разряды адреса (3 бита), и адреса контроля при помощи циклического избыточного кода (5 битов) для проверки ошибки данных адреса при передаче/приеме, она на основе принятых данных адреса передает данные, запомненные в устройстве расширения 50 (32 байта), и контроля при помощи циклического избыточного кода (8 битов) для проверки на наличие ошибки данных. Таким образом, устройство расширения 50 и процессор 10 изображения подключены друг к другу, и процессор 10 изображения может обрабатывать данные от устройства расширения 50.
На этапе S416 определяют, является ли введенная команда командой запроса считывания соединителя расширения (команда "3"). Если она не является командой "3", обработка переходит на этап S420, а если она является командой "3", то - на этап S418, на котором выполняется обработка считывания соединителя расширения. Конкретное действие будет описано со ссылками на фиг. 25, где подробно изображены данные передачи/приема между процессором 10 изображения и контроллером 40 в том случае, когда ЦП 11 выводит команду "3".
Если схема управления 442 контроллера 40 принимает данные команды "3", сформированные 1 байтом (8 битов), адресом H (8 битов), указывающим самые старшие разряды адреса, адресом L (3 бита), указывающим самые младшие разряды адреса, адресом контроля при помощи циклического избыточного кода (5 битов) для проверки наличия ошибки данных адреса при передаче/приеме и данными (32 байта), которые направляют к устройству расширения 50, то схема управления 442 передает контроль при помощи циклического избыточного кода (8 битов) для проверки наличия ошибки принятых данных. Таким образом, устройство расширения 50 и процессор 10 изображения подключены друг к другу, и процессор 10 изображения может управлять устройством расширения 50. Посредством подключения устройства расширения 50 и процессора 10 изображения можно резко повысить функцию контроллера 40.
На этапе S420 определяют, является ли введенная команда командой установки в исходное состояние (команда "255").
Если она не является командой "255", то обработка переходит на этап S402, а если она является командой "255", то - на этап S422, на котором выполняется обработка установки в исходное состояние счетчика джойстика. Конкретное действие будет описано со ссылками на фиг. 26, где представлены данные передачи/приема между процессором 10 изображения и контроллером 40 в то время, когда ЦП 11 выдает команду "255".
Если схема управления 442 контроллера принимает данные команды "255", сформированной 1 байтом (8 битов), она выдает сигнал установки в исходное состояние для установки в исходное состояние X-счетчика 444X и Y-счетчика 444Y и передает указанные TYPE L (1 байт), TYPE H (1 байт) и статус.
Далее подробно описана процедура установки в исходное состояние джойстика 45.
Для установки джойстика 45 в исходное состояние в целях определения ее исходной точки имеется три способа, то есть: манипулирование кнопками, включение/выключение источника питания, способ управления с помощью процессора 10 изображения.
(1) Установка в исходное состояние с помощью кнопок
Со ссылками на блок-схему на фиг. 27 описывается установка в исходное состояние счетчика 444, который хранит данные, указывающие наклонное состояние джойстика 45. Сначала на этапе S432 схема детектирования 443 сигнала переключения определяет, нажаты ли кнопки 406L, 406R и 405 одновременно. Затем, если эти три кнопки нажаты, детектирование сигналов переключения выполняют непрерывно. Если эти три кнопки нажаты одновременно, выводят сигнал установки в исходное состояние.
При реагировании на сигнал установки в исходное состояние на этапе S434 значения X-счетчика 444X и Y-счетчика 444Y устанавливают в исходное состояние. Поэтому исходную точку джойстика определяют всякий раз, когда одновременно нажаты кнопки 406L, 406R и 405.
В этом варианте осуществления, когда оператор одновременно нажимает кнопки 406L, 406R и 405, сигнал установки в исходное состояние генерируется схемой детектирования 443 сигнала переключения; но число кнопок не ограничивается тремя, и может быть равным двум или четырем. Одновременно нажатые кнопки не ограничиваются указанными кнопками, а могут быть произвольными.
(2) Установка в исходное состояние включением/выключением источника питания
Блок-схема, изображенная на фиг. 28, иллюстрирует установку в исходное состояние счетчика 444. Сигнал установки в исходное состояние выдается схемой 447 установки в исходное состояние при включении питания в ответ на включение переключателя (не изображен) источника питания процессора 10 изображения оператором, когда контроллер 40 подключен к процессору 10 изображения, или в ответ на подачу питания на контроллер 40 путем соединения соединительного гнезда контроллера 40 с одним из контроллерных соединителей 181-184 процессора 10 изображения, когда контроллер 40 не подключен к процессору 10 изображения. В ответ на этот сигнал установки в исходное состояние на этапе S442 устанавливаются в исходное состояние значения X-счетчика 444X и Y-счетчика 444Y. Таким образом, исходная точка джойстика определяется всякий раз, когда на контроллер 40 подается питание.
(3) Установка в исходное состояние с помощью процессора 10 изображения
Счетчик 444 также устанавливается в исходное состояние при выполнении этапов S420 и S422, изображенных на фиг. 21. С помощью этой операции установки в исходное состояние можно легко определить исходную точку джойстика 45 по программе в соответствии со статусом обработки, осуществляемой процессором 10 изображения.
В соответствии с изложенными выше способами можно устанавливать в исходное состояние X-счетчик 444X и Y-счетчик 444Y. Если сигнал установки в исходное состояние выдан в момент, когда рычаг 474 находится в нейтральном положении, то есть когда оператор не воздействует на рычаг 474, то можно исключить запоминание ошибочных значений счета в X-счетчике 444X и Y-счетчике 444Y, и поэтому можно исключить передачу ошибочных значений счета в процессор 10 изображения.
На фиг. 29 представлен пример изменения экрана монитора с помощью контроллера 40. Левая иллюстрация на фиг. 29 изображает диапазон физического наклона рычага 474 с помощью координатной плоскости. Круг, изображенный в центре, указывает рычаг 474, и показано состояние, когда оператор не действует рычагом 474, то есть состояние, при котором рычаг 474 находится в прямом вертикальном положении относительно корпуса. Если рычаг 474 наклонен к передней стороне, круг перемещается в положительном (+) направлении по оси Y, если рычаг 474 наклонен к задней стороне, круг перемещается в отрицательном (-) направлении оси Y. Если рычаг 474 наклонен в направлении вправо, то круг перемещается в положительном (+) направлении оси X, и если рычаг 474 наклонен влево, круг перемещается в отрицательном (-) направлении оси X.
Правая иллюстрация на фиг. 29 изображает экран дисплея игры, в которой противник берется под прицел наклонением рычага 474 вперед, назад, влево и вправо, чтобы перемещать прицел 35 вверх, вниз, влево и вправо. Облака 31, горы 32 и здания 33 составляют фоновое изображение, которое может изменяться прокруткой и др. ; противник 34 является объектом, который может свободно перемещаться по экрану. Например, когда противник 34 отображен в правой верхней части экрана, если оператор наклоняет рычаг 474 вправо и затем вперед, то X-счетчик 444X и Y-счетчик 444Y увеличивают свои значения и поэтому значения их счета возрастают. Значения счета передаются к процессору 10 изображения, который изменяет положение отображения прицела 35 с помощью данных значений счета. Поэтому прицел 35 совмещается с противником 34. Затем в момент совмещения прицела 35 с противником 34 при нажатии кнопки 404A данные переключения кнопки также передаются на процессор 10 изображения, аналогично данным счетчика. Соответственно, процессор 10 изображения генерирует видеосигнал для отображения на экране, например, ракеты (не показана) или иного подобного средства для нападения на противника 34.
Со ссылками на фиг. 30 описывается пример, когда аналоговый джойстик устанавливают в состояние, при котором рычаг 474 отклонен от центра, то есть рычаг 474 наклонен. Когда X-счетчик 444X и Y-счетчик 444Y исходно установлены в координатное положение, указанное сплошной круговой линией на левой иллюстрации фиг. 30, - если оператор отпускает руку от рычага 474, рычаг 474 возвращается к центру координаты, то есть в положение, обозначенное пунктирной круговой линией. Изменение изображения будет описано с помочью правой иллюстрации на фиг. 30. Во-первых, когда X-счетчик 444X и Y-счетчик 444Y установлены в исходное состояние, аналогично правой иллюстрации на фиг. 29, прицел 35 отображается на сплошной круговой линии, поскольку значения счета X-счетчика 444X и Y-счетчика 444Y оба равны "0", что равно исходным значениям. Затем, если оператор отпускает рычаг 474, то рычаг 474 возвращается в центральное положение координат и X-счетчик 444X в контроллере 40 увеличивает значение, а Y- счетчик 444Y уменьшает значение, и поэтому значения счетчиков 444X и 444Y становятся соответственно больше и меньше. Значения отсчетов передаются в процессор 10 изображения, который изменяет положение отображения прицела 35 с помощью данных значений отсчетов на положение прицела 35, указанное пунктирной линией.
Далее следует описание операции установки в исходное состояние в соответствии с хронированием. Например, если оператор предполагает, что положение появления противника 34 соответствует положению прицела 35, изображенному пунктирной линией на правой иллюстрации на фиг. 30, то оператор желает совместить прицел 35 с положением прицела 35 в виде пунктирной линии в момент появления противника 34. Но если прицел 35 постоянно удерживать в положении прицела 35, показанном пунктирной линией, то играющему оператору это надоест, и, кроме того, возможно, что если противник 34 появится не в предполагаемом месте, то оператор не сможет его атаковать, и поэтому для наложения прицела 35 на положение прицела 35 в виде пунктирной линии в момент появления противника и для свободного перемещения прицела 35 в другое положение используют изложенную выше функцию установки в исходное состояние. Оператор сначала наклоняет рычаг 474, в результате чего прицел 35 отображается в положении, симметрично соответствующем положению предполагаемого появления противника 34 (положение прицела 35, показанное пунктирной линией) относительно прицела 35, показанного сплошной линией. В этот момент физическое координатное положение рычага 474 становится сплошной круговой линией на левой иллюстрации на фиг. 30. Затем оператор одновременно нажимает на три кнопки 406L, 406R и 405. При реагировании на нажатие оба счетчика, X-счетчик 444X и Y-счетчик 444Y, устанавливаются в исходное состояние, а прицел 35 отображается в положении прицела 35, показанного сплошной линией. Затем оператор свободно перемещает прицел 35 и ожидает появления противника 34. При появлении противника 34 в положении прицела 35, соответствующем пунктирной линии, оператор отпускает рычаг 474. Рычаг 474 возвращается в физическое координатное положение, изображенное пунктирной круговой линией на левой иллюстрации на фиг. 30. В результате этого прицел 35 отображается на прицеле 35, показанном пунктирной линией. Когда оператор уверенно совмещает прицел 35 с противником 34 и нажимает переключатель, например кнопку 404A, ракета (не показана) или подобное средство, атакующее противника 34, отображается на экране.
Если операция установки в исходное состояние выполняется в указанном выше порядке, то можно намного переместить рычаг 474 в правом нижнем направлении, и поэтому описанная выше операция установки в исходное состояние также эффективна и в том случае, когда оператор желает намного переместить рычаг 474 вправо вниз.
Далее описывается процедура коррекции данных аналогового джойстика 45, выполняемая в соответствии с изобретением. Причины, по которым необходимо корректировать данные аналогового джойстика, связаны с отклонением данных в нейтральном положении рычага 474 и с необходимостью изменения диапазона наклона рычага 474.
Для коррекции данных аналогового джойстика 45 выполняют процедуру прерывания таймера, изображенную на фиг. 31. Процедуру прерывания таймера выполняют периодически, через постоянный период времени, например 1/30 с.
На первом этапе S1, изображенном на фиг. 31, значение X-счетчика и значение Y-счетчика, то есть координатные данные Xa и Ya, указывающие фактическое направление наклона и фактическую величину наклона рычага 474, считывают с X-счетчика 444X и Y-счетчика 444Y. Данные Xa и Ya запоминают в памяти (не показана), содержащейся в схеме управления 442. На следующем этапе S2 выполняют коррекцию центра. Термин "коррекция центра" означает операцию коррекции, с помощью которой корректируют отклонения данных Xa и Ya от "0" в нейтральном положении рычага 474 аналогового джойстика 45. Более конкретно, если оператор прекращает действовать рычагом 474, рычаг 474 возвращается в свое нейтральное положение и в это время данные Xa и Ya становятся равными "0". Но поскольку во внутреннем механизме аналогового джойстика 45 имеет место трение, то данные Xa и Ya X-счетчика 444X и Y-счетчика 444Y могут не возвратиться к "0" в нейтральном положении рычага 474. Как описано подробно ниже, для коррекции центра могут использоваться три способа, иллюстрируемые на фиг. 32, 34 и 36.
Если коррекция центра на этапе S2 завершена, на следующем этапе S3 определяют, является ли режим коррекции периферии, установленный в данное время, "режимом круга". В описанном выше варианте осуществления направляющее кольцо 486 аналогового джойстика 45 имеет восьмиугольный внешний край 491, и поэтому рычаг 474 можно наклонять в пределах этого восьмиугольного диапазона благодаря внешнему краю 491 направляющего кольца 486. Но в соответствии с содержанием игры может потребоваться осуществить наклоны в пределах круговой области, а не восьмиугольной. Случай, когда диапазон существенного наклона рычага 474 является круг, как показано на фиг. 38, называется "режимом круга", а случай, когда диапазоном существенного наклона является квадрат, называется "режимом квадрата". В первом случае, хотя рычаг 474 фактически наклоняется в пределах восьмиугольной области ввиду его ограничения восьмиугольным внешним краем 491, на этапе S4 перемещение рычага 474 корректируют в круговой диапазон, показанный на фиг. 38. Во втором случае, на этапе S5, перемещение рычага 474 корректируют в квадратный диапазон, изображенный на фиг. 40. "Режим круга" предпочтительно применим для игр, когда желательно, чтобы данные джойстика не изменялись в соответствии с направлением наклона рычага 474, когда, например, подвижный символ перемещается во всех направлениях на экране монитора при реагировании на направление и степень наклона рычага. "Режим квадрата" предпочтительно применим для игр, когда рычаг 474 наклоняют влево или вправо в состоянии наклона рычага 474 вперед или назад в его положении максимального наклона, например, как в случае упомянутой игры типа гонок.
Способы коррекции центра пояснены ниже со ссылками на фиг. 32 и 33. Способ, иллюстрируемый на фиг. 32, представляет собой способ, когда данные Xa и Ya X-счетчика 444X и Y-счетчика 444Y соответственно имеются в заданном диапазоне, определяемом штриховкой на фиг. 32, а данные, выдаваемые с аналогового джойстика 45 (далее - "данные джойстика") X и Y, рассматриваются как "0" соответственно. Конкретно, если данные Xa счетчика находятся в диапазоне от "+16" до "-16", то данные X джойстика выдают как "0". Аналогично, если данные Ya счетчика находятся в диапазоне от "+16" до "-16", данные Y джойстика выдают как "0". Указанные цифровые значения "+16" и "-16" определены экспериментально, но, разумеется, можно установить другие произвольные цифровые значения. То есть в соответствии с проведенными экспериментами, отклонение данных в нейтральном положении рычага 474 находится в приблизительных пределах от "+16" до "-16", и поэтому использованы указанные цифровые значения; но если обнаружится, что предпочтительными являются другие цифровые значения, то можно использовать эти другие цифровые значения.
На первом этапе S11, показанном на фиг. 33, определяют, превышают ли данные Ya счетчика значение "16" (Ya > 16). Если данные Уа счетчика превышают "16", то на следующем этапе S12 значение, полученное вычитанием "16" из данных счетчика Ya (Ya - 16), устанавливают в качестве данных по оси Y джойстика.
При отрицательном результате проверки на этапе S11 затем на этапе S13 определяют, меньше ли данные Ya счетчика, чем "-16". Если на этапе S13 определено, что данные Ya счетчика меньше "-16", то на следующем этапе S14 в качестве данных Y джойстика устанавливают значение, полученное прибавлением "16" к данным Ya счетчика (Ya + 16).
Если на этапе S13 определено, что данные Ya счетчика находятся в пределах от "16" до "-16", то на этапе S15 в качестве данных джойстика по оси Y выдают "0" (Y = 0).
После этапа S12, S14 или S15 на этапе S16 определяют, превышают ли данные Xa счетчика "16" (Xa > 16). Если на этапе S16 определено, что данные Xa счетчика больше "16", то на следующем этапе S17 величину, полученную вычитанием "16" из данных Xa счетчика (Xa - 16), устанавливают в качестве данных по оси X джойстика.
При отрицательном результате проверки на этапе S18, затем на этапе S16 определяют, меньше ли данные Xa счетчика, чем "-16". Если на этапе S18 определено, что данные Xa счетчика меньше "-16", то на следующем этапе S19 в качестве данных X джойстика устанавливают величину, полученную прибавлением "16" к данным Xa счетчика (Xa + 16).
Если на этапе S18 определено, что данные Xa счетчика находятся в пределах от "16" до "-16", то на этапе S20 в качестве данных по оси X джойстика выдают "0" (X = 0). Затем процедура обработки возвращается к показанной на фиг. 31.
В соответствии с первым способом данные Xa и Ya джойстика, как те, так и другие, устанавливаются в "0" при нейтральном положении рычага 474, и поэтому проблема отклонения данных в нейтральном положении может быть решена. На область вблизи оси X и оси Y, т.е. заштрихованная область на фиг. 32, становится мертвой зоной, в которой несмотря на перемещение рычага 474 данные джойстика выдаются как "0", т.е. имеет место "мертвый ход". Поэтому рассмотренный первый способ предпочтительно применим к игре, в которой допустим "мертвый ход" аналогового джойстика.
Во втором способе коррекции центра, иллюстрируемом с помощью фиг. 34 и 35, данные смещаются таким образом, что круговой участок, показанный на фиг. 34, совмещается с центром (0,0). Более конкретно, данные X-счетчика вне заштрихованной области на фиг. 34 получают сдвиг к центру на  В этом способе, который отличается от первого способа, "мертвый ход" отсутствует, но необходимы вычисления тригонометрических функций и корней. Более конкретно, на этапе S21, изображенном на фиг. 35, степень наклона Da рычага 474 вычисляют по следующему уравнению (1):
В этом способе, который отличается от первого способа, "мертвый ход" отсутствует, но необходимы вычисления тригонометрических функций и корней. Более конкретно, на этапе S21, изображенном на фиг. 35, степень наклона Da рычага 474 вычисляют по следующему уравнению (1):
Затем на следующем этапе S22 определяют, равна ли степень наклонения Da заданному значению  или превышает ее.
или превышает ее.
То есть на этапе S22 определяют, находится ли степень наклона Da рычага 474 в пределах круга, изображенного на фиг. 34. При отрицательном результате проверки на этапе S22 затем на этапе S23 выдают данные джойстика в виде "0". То есть устанавливают X = 0, Y = 0 и D = 0.
При положительном результате проверки на этапе S22, данные джойстика вычисляют с помощью следующих уравнений (2):
Таким образом, согласно второму способу прямолинейное перемещение, изображенное как A и B на фиг. 34, преобразуют в криволинейное перемещение, изображенное как A' и B'.
В третьем способе коррекции центра данные счетчика преобразуют таким образом, что квадратная область, показанная на фиг. 36, то есть область исходного положения рычага 474, совмещается с центром (0,0). В третьем способе "мертвый ход" отсутствует, и нет необходимости выполнять сложные вычисления.
На первом этапе S31 на фиг. 37 определяют, превышают ли данные Xa счетчика заданное значение (например, "16"). При положительном результате проверки на этапе S31, затем на следующем этапе S32 вычисляют промежуточные значения Ya1 и Xa1 согласно следующим уравнениям (3):
Ya1 = Ya(16/Xa)
Xa1 = 16 (3)
При отрицательном результате проверки на этапе S31 на этапе S33 определяют, не меньше ли данные Xa счетчика, чем заданное значение ("-16", например). При положительном результате проверки на следующем этапе S34 промежуточные значения Ya1 и Xa1 вычисляют согласно следующим уравнениям (4):
Ya1 = Ya (16/-Xa)
Xa1 = -16 (4)
Помимо этого, при отрицательном результате проверки на каждом из этапов S31 и S33 данные счетчиков выдаются сами в качестве промежуточных значений.
На последующем этапе S36 определяют, больше ли промежуточное значение Ya1, чем заданное значение (например, "16"). При положительном результате проверки на следующем этапе S37 промежуточные значения Ya2 и Xa2 вычисляют согласно следующим уравнениям (5):
Xa2 = Xa1(16/Ya1)
Ya2 = 16 (5)
При отрицательном результате проверки на этапе S36 на этапе S38 определяют, меньше ли промежуточное значение Ya1, чем заданное значение ("-16", например). Если это так, то на следующем этапе S39 промежуточные значения Ya2 и Xa2 вычисляют с помощью следующих уравнений (6):
Xa2 = Xa1(16/-Ya1)
Ya2 = -16 (6)
При отрицательных результатах проверки на этапах S36 и S38 промежуточные значения Ya1 и Xa1 сами выводятся в качестве промежуточных значений Ya2 и Xa2.
После этого выполняют этап S41 для определения возможности одновременного соблюдения четырех условий. Первое условие - данные Xa счетчика равны или больше "-16" (Xa≥ -16). Второе условие - данные Xa счетчика равны или меньше "16" (Xa≤ 16). Третье условие - данные Ya счетчика равны или больше "-16" (Ya ≥ -16); и четвертое условие - данные Ya счетчика равны или меньше "16" (Ya≤ 16). Если все четыре условия выполняются, то в качестве данных X и Y джойстика выдают "0" (Y = 0, X = 0). При отрицательном результате проверки данные Y и X джойстика вычисляют по следующим уравнениям (7):
Y = Ya - Ya2
X = Xa - Xa2 (7)
После коррекции центра, выполненной указанным выше образом по одному из трех способов, выполняют этапы обработки, следующие за этапом S3 на фиг. 31.
Со ссылками на фиг. 38 и 39 далее следует описание этапа S4 для фиг. 31, т.е. - "режима круга". В режиме круга область физического наклона рычага 474 корректируют в круговую форму. Однако нужно отметить, что данные, используемые в этой коррекции периферии, являются данными, заранее прошедшими коррекцию центра, т.е. - данными джойстика. В способе, иллюстрируемом с помощью фиг. 38, участок, определенный разницей между восьмиугольным контуром и круговым контуром, то есть заштрихованный участок на фиг. 38, характеризует собой "мертвый ход" рычага 474.
Более конкретно, на первом этапе S51 на фиг. 39, аналогично этапу S21 и уравнению (1), степень наклона D вычисляют по данным X и Y джойстика. Затем на этапе S52 определяют, превышает ли степень наклона D свое максимальное значение Dmax (D > Dmax). Максимальное значение Dmax степени наклона является характерным значением для аналогового джойстика 45 и заранее запоминается в памяти (не показана). На этапе S52 степень наклона D и максимальное значение Dmax сравнивают друг с другом. Отрицательный результат проверки на этапе S52 означает, что рычаг 474 не наклонен до положения, при котором рычаг 474 контактирует с направляющим кольцом 486 (фиг. 15); и в этом случае выдают данные джойстика с учетом проведенной коррекции центра.
Если рычаг 474 наклонен до положения, в котором рычаг 474 контактирует с направляющим кольцом 486, то есть при положительном результате проверки на этапе S52 данные X' и Y' джойстика вычисляют согласно следующим уравнениям (8):
X' = X(Dmax/D)
Y' = Y(Dmax/D) (8)
Таким образом, диапазон физического наклона для восьмиугольного контура может быть преобразован или скорректирован в диапазон существенного наклона для кругового контура.
Со ссылками на фиг. 40 и 41 ниже описывается "режим квадрата" на этапе S5 по фиг. 31. В "режиме квадрата" область физического наклона рычага 474 корректируют в квадратную форму, изображенную на фиг. 40. В этом случае область, определенная разницей между восьмиугольным контуром и квадратным контуром, то есть заштрихованный участок на фиг. 40, определяет собой "мертвый ход" рычага 474.
На первом этапе S61 на фиг. 41 определяют, превышают ли данные X джойстика свое максимальное значение Xmax. Аналогично положительному максимальному значению оси Y (описано ниже) положительное максимальное значение Xmax оси X является значением, присущим аналоговому джойстику 45, и запоминается заранее в памяти (не показана). На этапе S61 данные X джойстика и максимальное значение Xmax сравнивают друг с другом. При положительном результате проверки на этапе S61, затем на этапе S62 положительное максимальное значение Xmax выдают в качестве данных оси X джойстика.
При отрицательном результате проверки на этапе S61, затем на этапе S63 определяют, меньше ли данные оси X джойстика, чем их значение отрицательного максимума -Xmax. Значение отрицательного максимума -Xmax оси X также является значением, присущим аналоговому джойстику 45, и его заранее запоминают в памяти. На этапе S63 данные X джойстика и значение отрицательного максимума -Xmax сравнивают друг с другом. При положительном результате проверки на этапе S63, затем на этапе S62 в качестве данных оси X джойстика выдают -Xmax.
В отношении оси Y выполняют аналогичную обработку. Более конкретно, на этапе S65 определяют, превышают ли данные оси Y джойстика свое максимальное значение Ymax. Положительное максимальное значение Ymax оси Y также является значением, характерным для аналогового джойстика 45, и его запоминают заранее в памяти. Поэтому на этапе S65 данные Y джойстика и значение положительного максимума Ymax сравнивают друг с другом. При положительном результате проверки на этапе S65, затем на этапе S66 в качестве данных Y джойстика выдают положительное максимальное значение Ymax.
При отрицательном результате проверки на этапе S65 на этапе S67 далее определяют, меньше ли данные оси Y джойстика, чем их отрицательное максимальное значение -Ymax. Отрицательное максимальное значение -Ymax оси Y также является значением, присущим аналоговому джойстику 45, и его заранее запоминают в памяти. Поэтому на этапе S67 данные Y джойстика и отрицательное максимальное значение -Ymax сравнивают друг с другом. При положительном результате проверки на этапе S67, затем на этапе S68 в качестве данных оси Y джойстика выдают отрицательное максимальное значение -Ymax.
Таким образом, в изложенном выше варианте осуществления путем установки мертвой зоны в части (центральной части и/или периферийной части) диапазона наклона рычага 474 можно не только решить проблему отклонения данных в нейтральном положении рычага 474, но и произвольно устанавливать диапазон существенного наклона рычага 474 независимо от формы направляющего кольца 486. В результате обеспечивается возможность определения формы диапазона существенного наклона рычага 474 в том виде, который предпочтителен для данной конкретной игры.
Несмотря на то что данное изобретение детально описано и проиллюстрировано выше, следует иметь в виду, что это описание и иллюстрации даны только в качестве примера, но не для ограничения, при этом сущность и объем изобретения определяются только формулой изобретения.
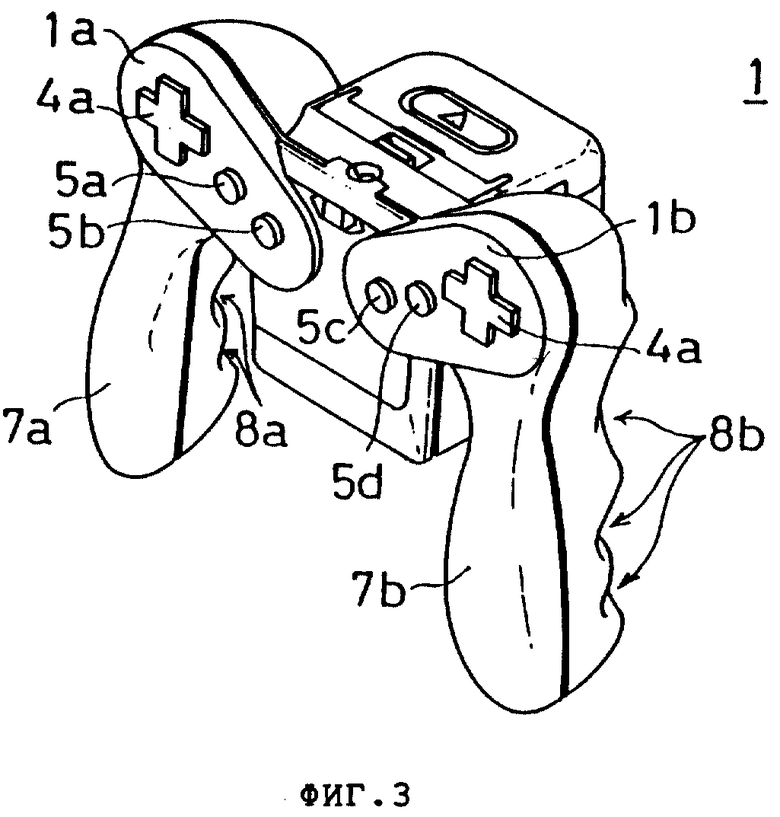
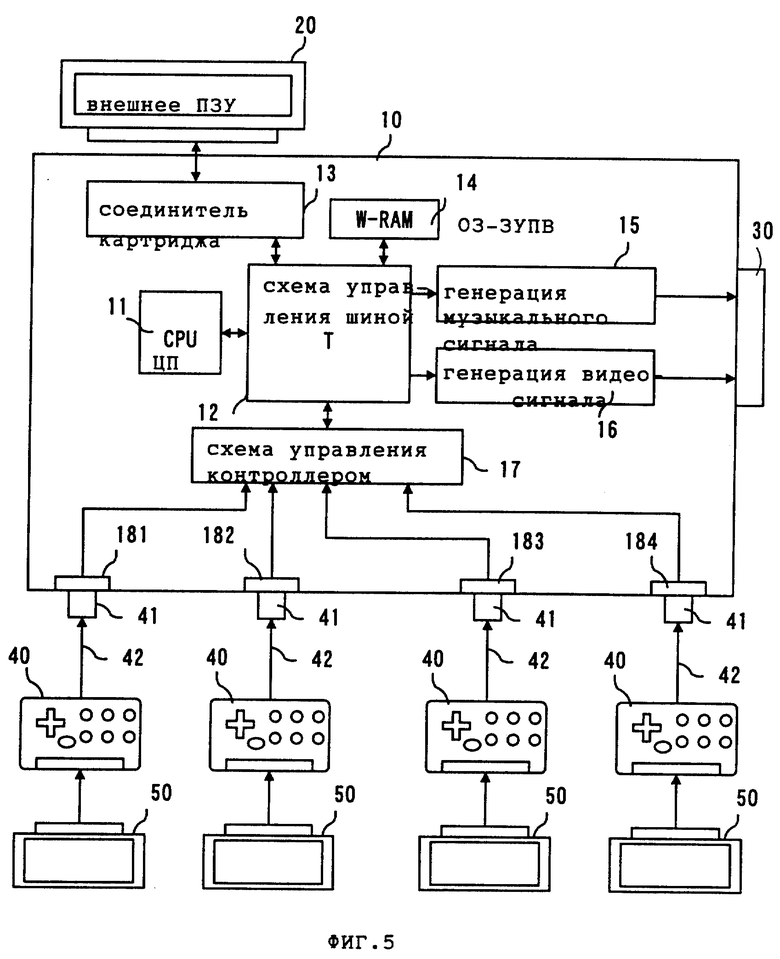
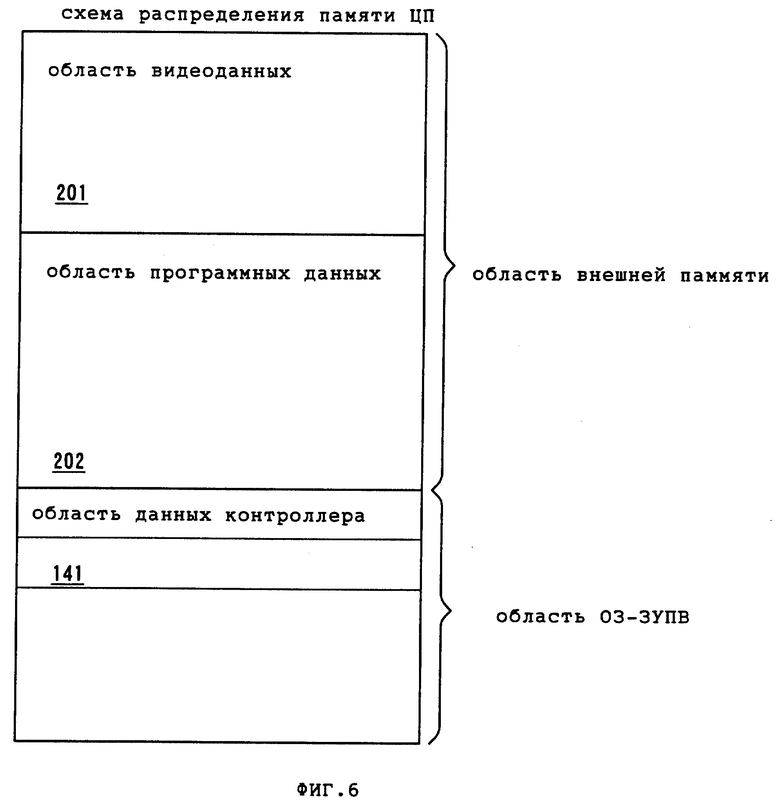
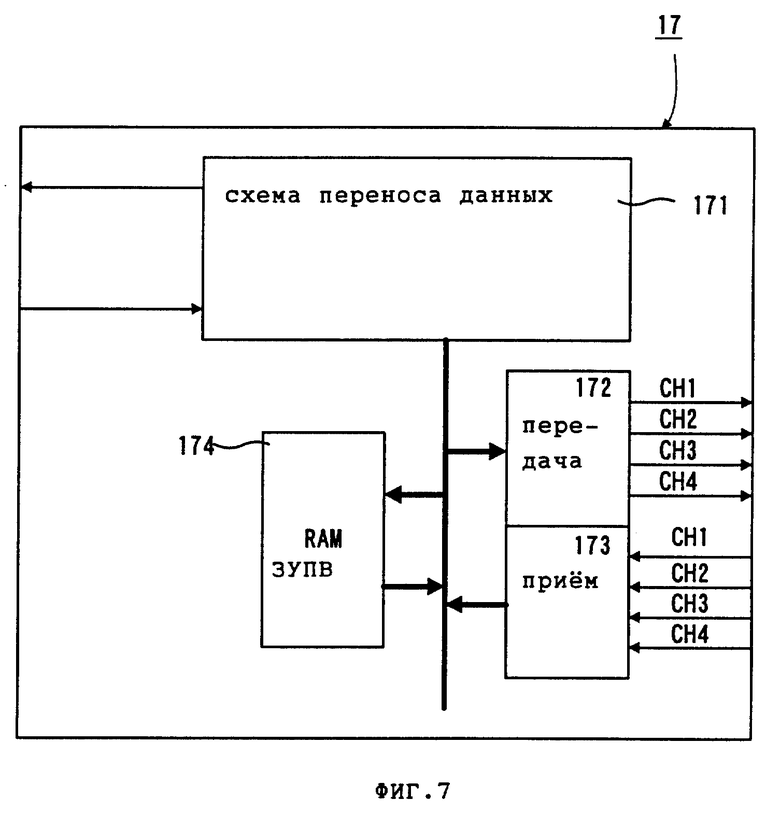
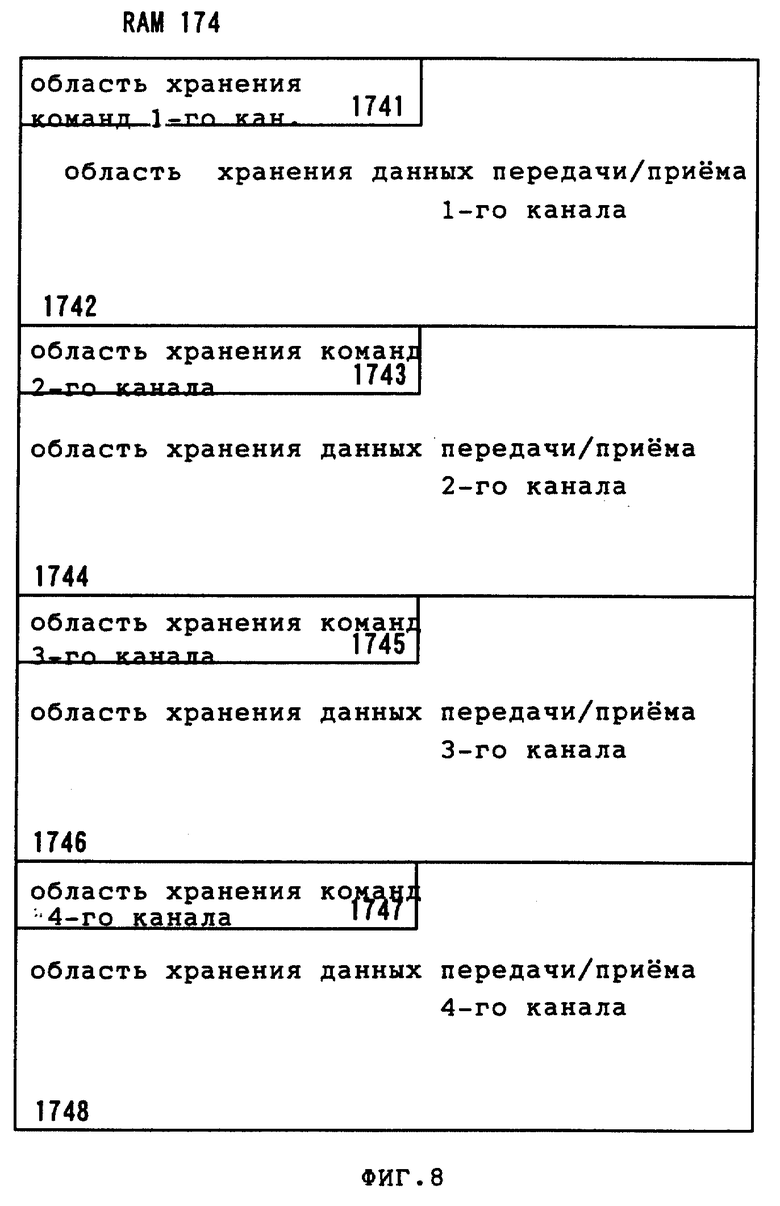
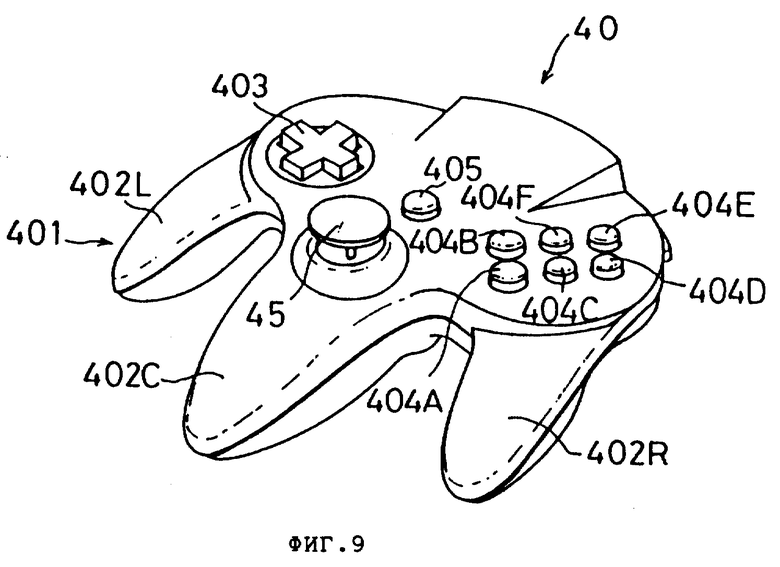
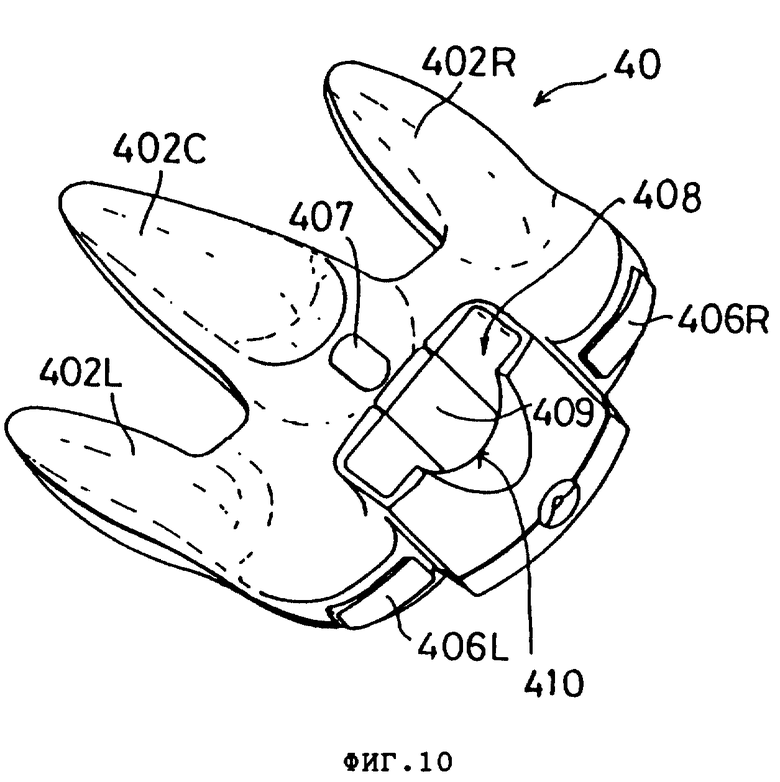
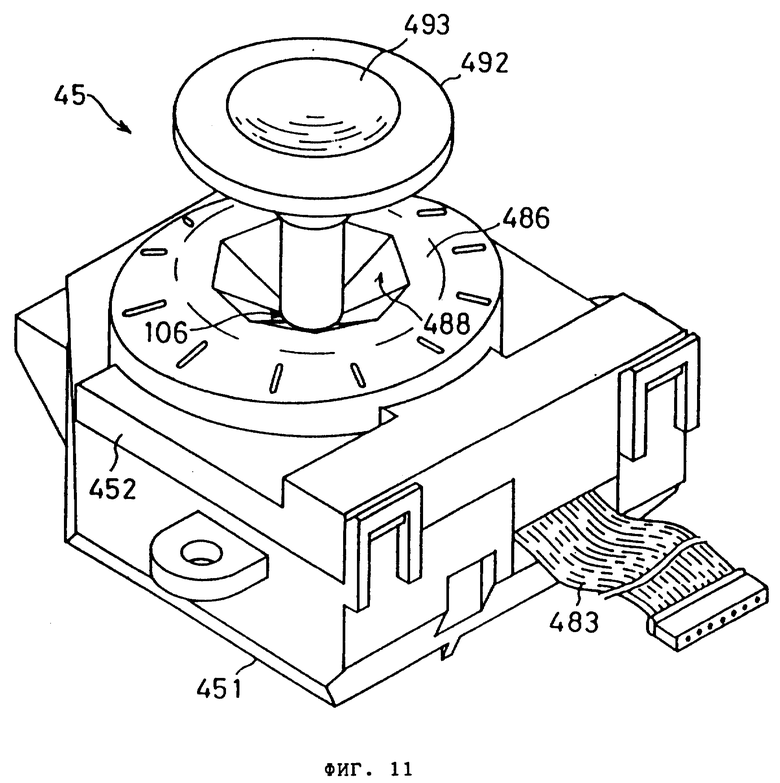
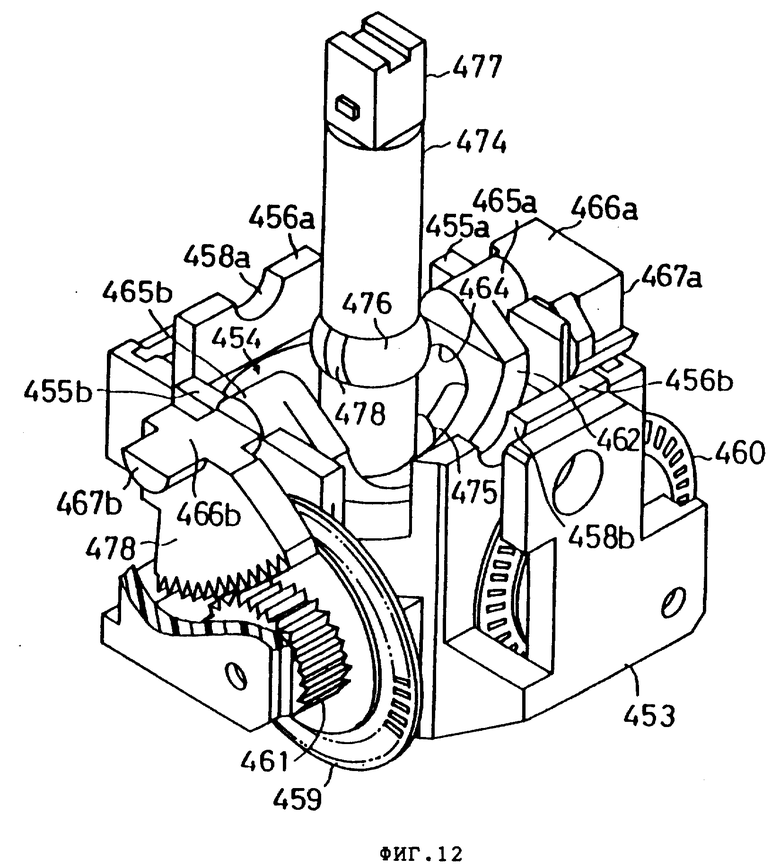
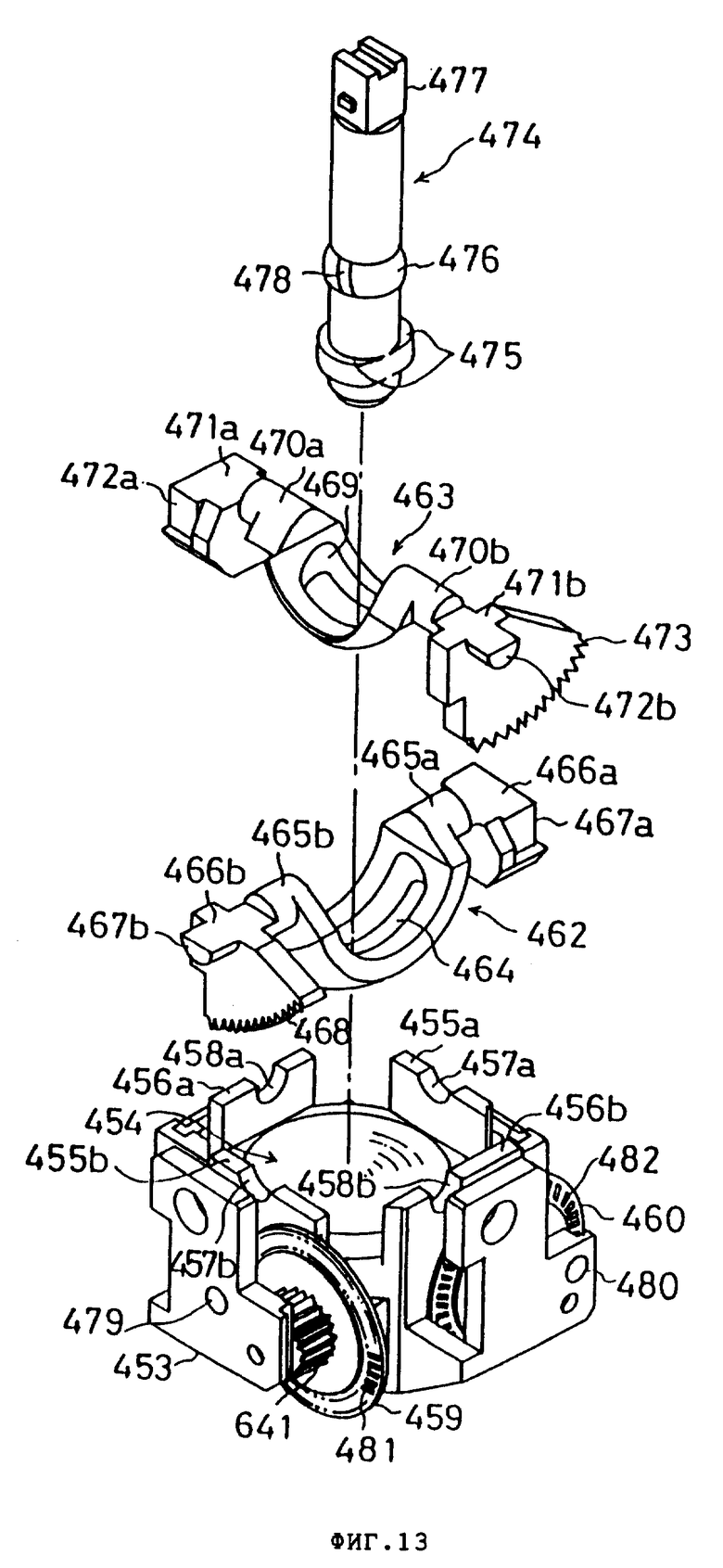
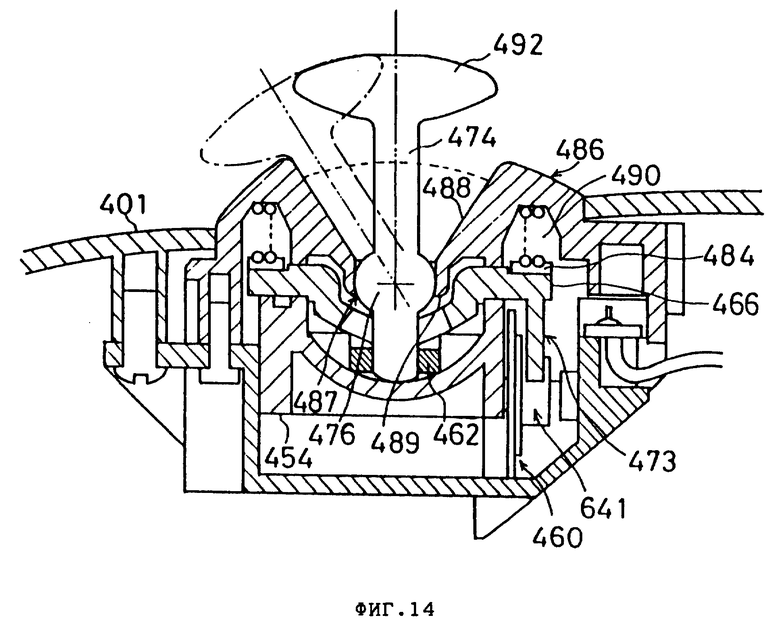
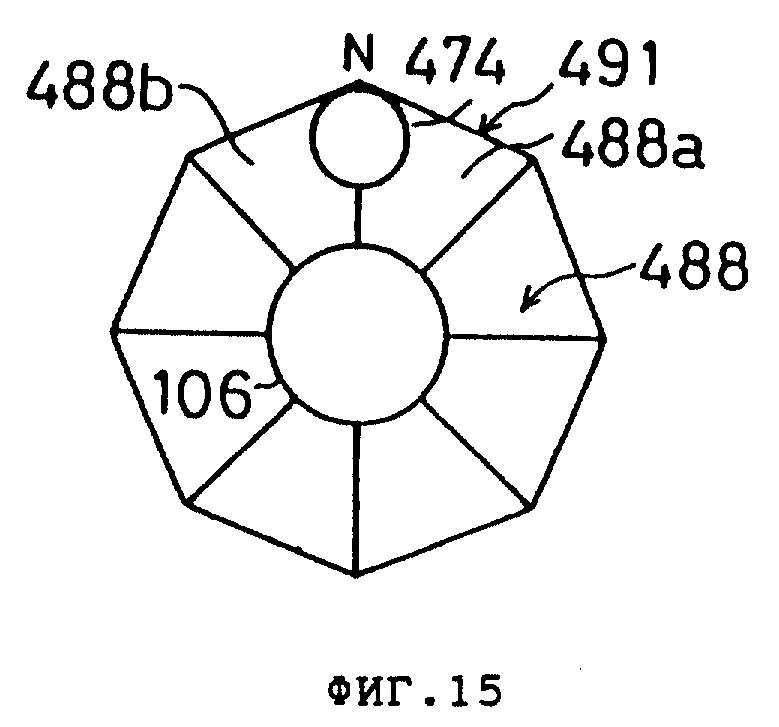
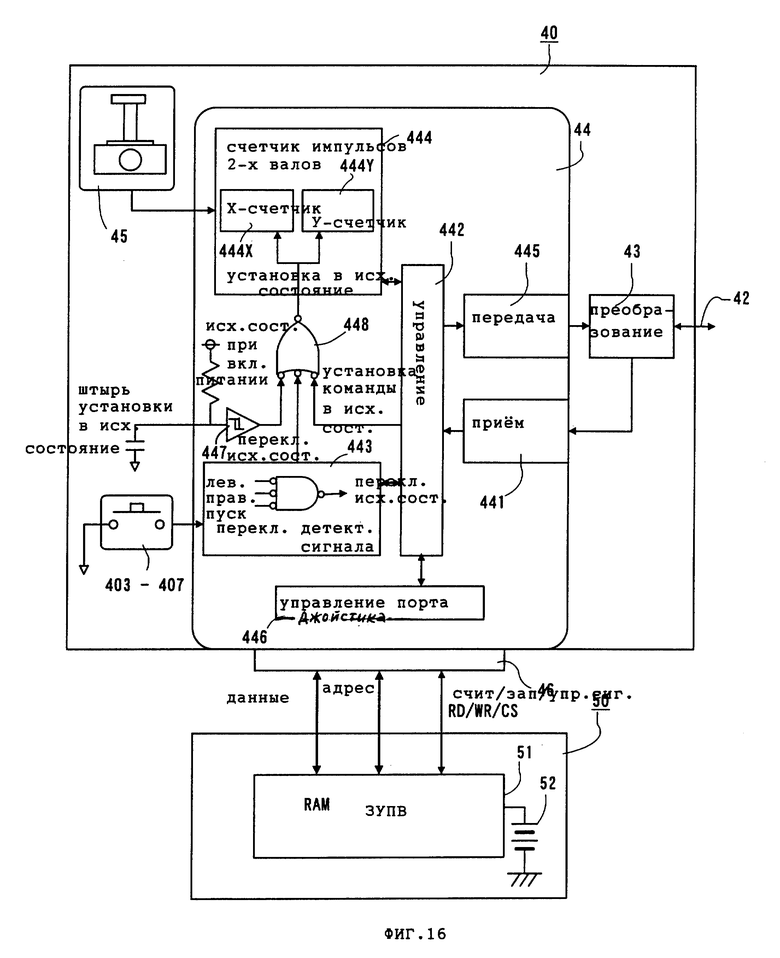
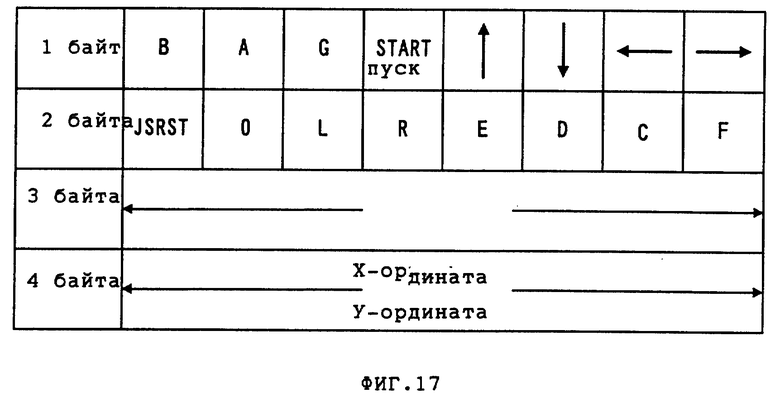
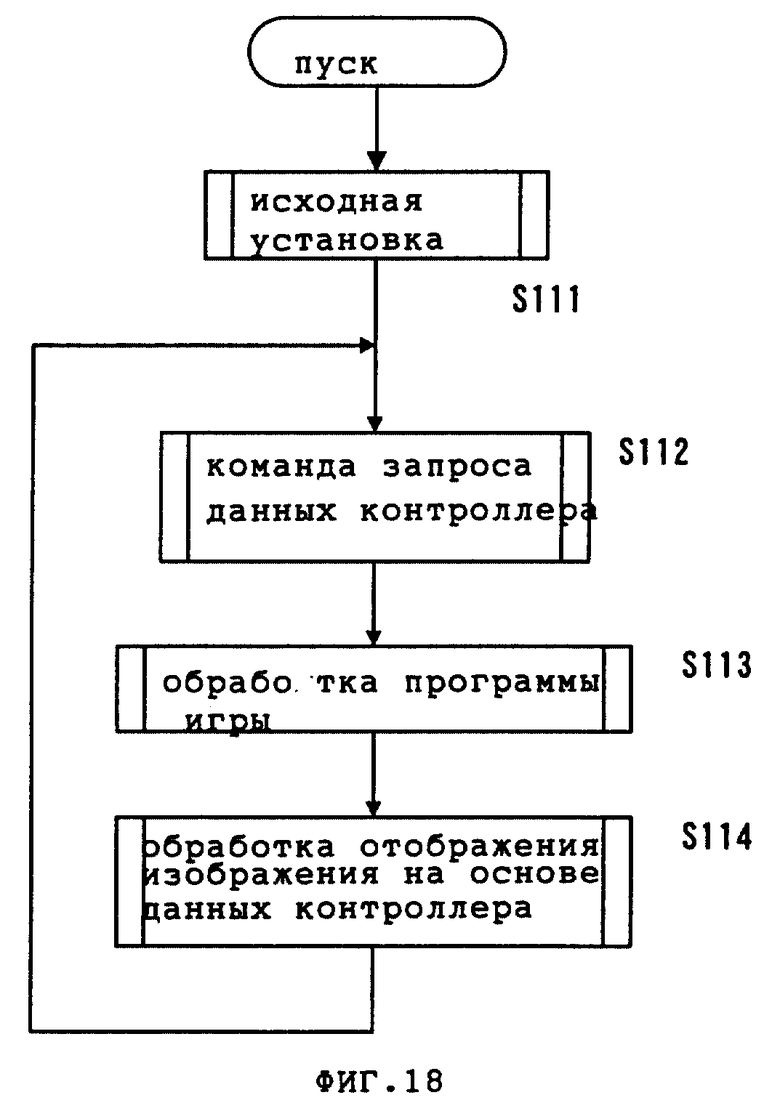
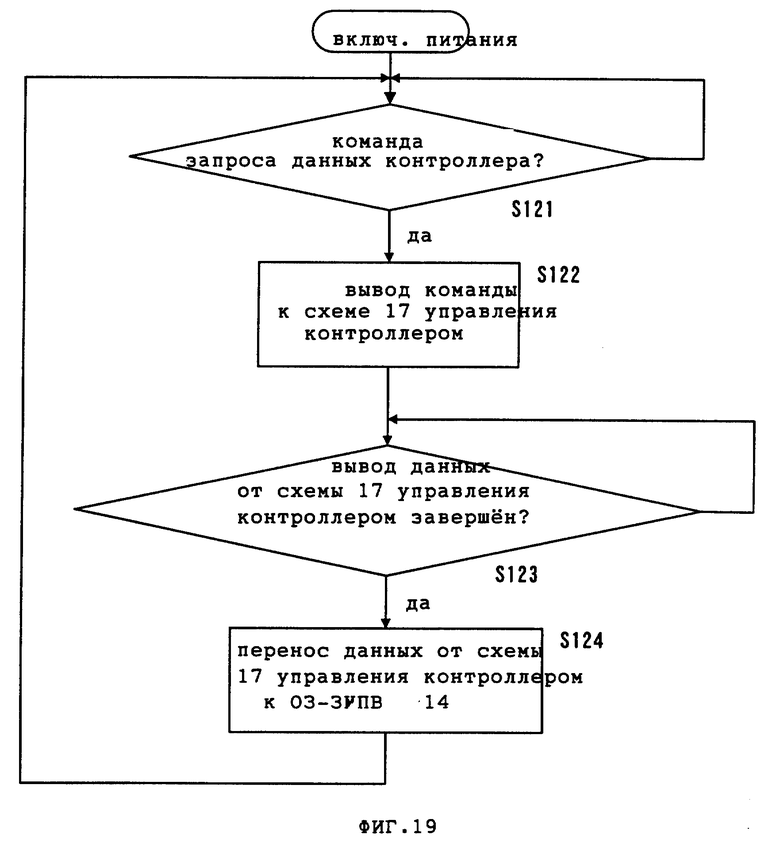
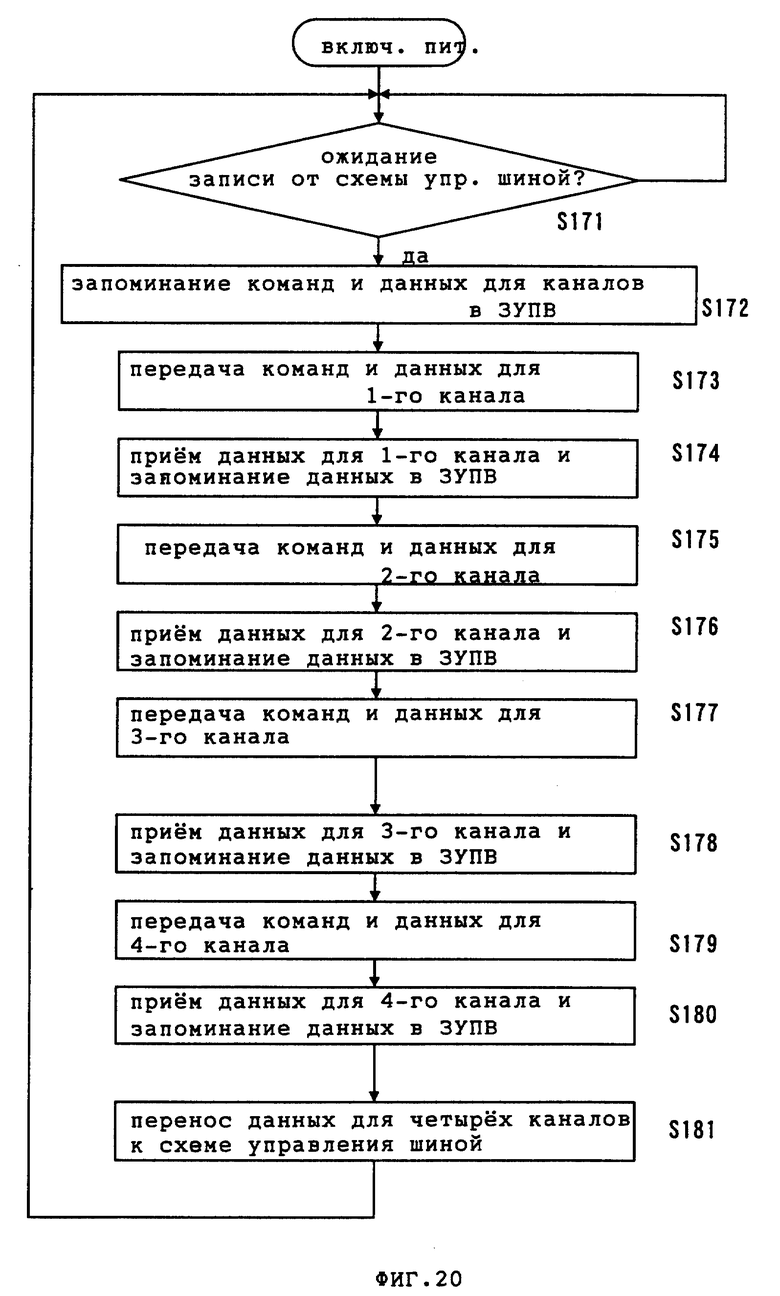
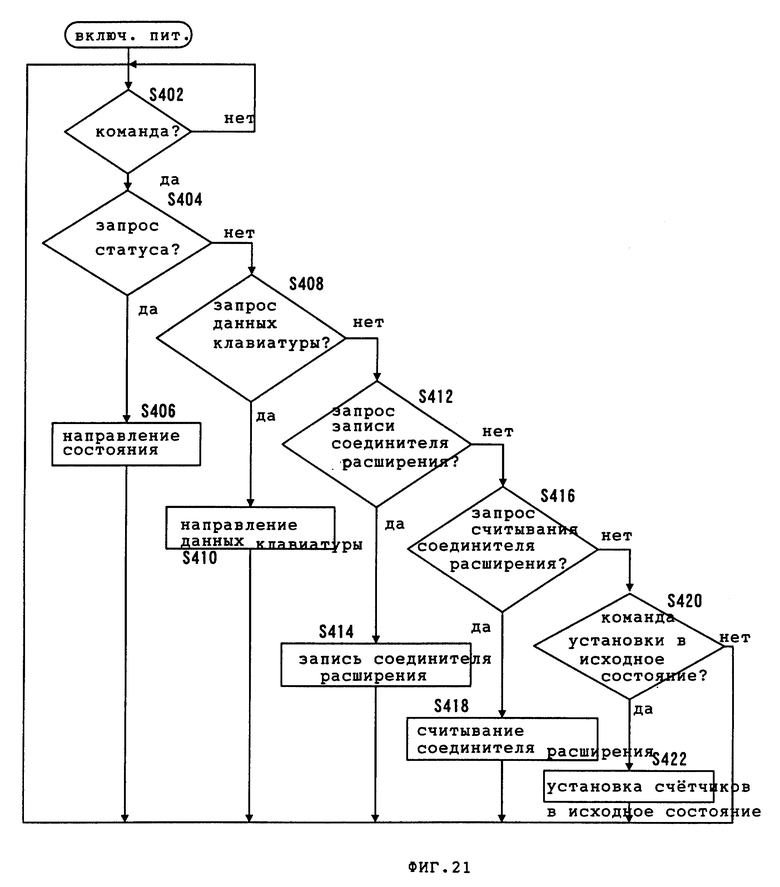
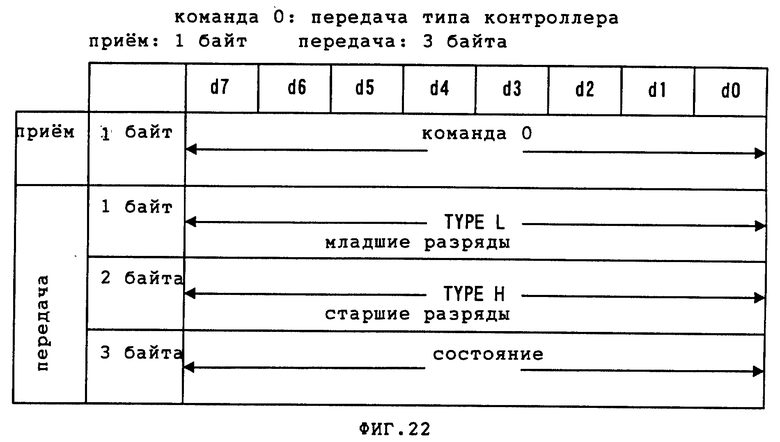
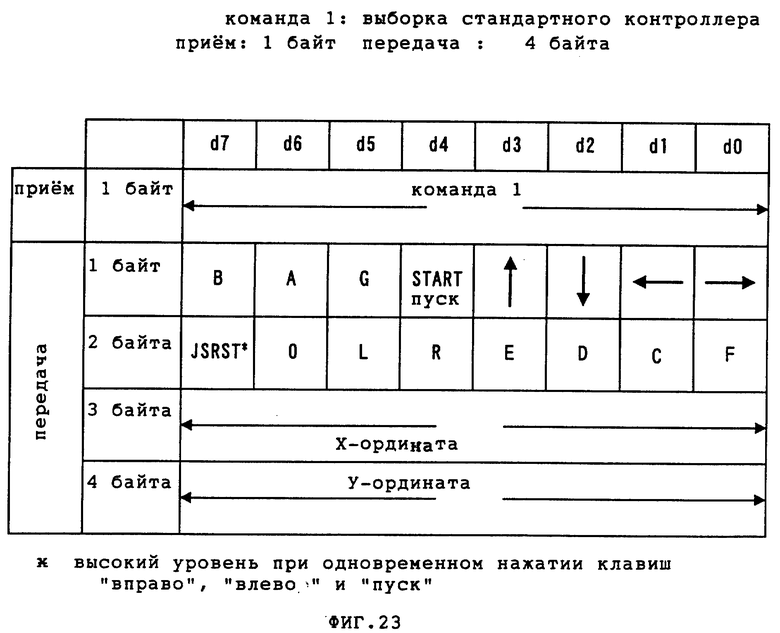
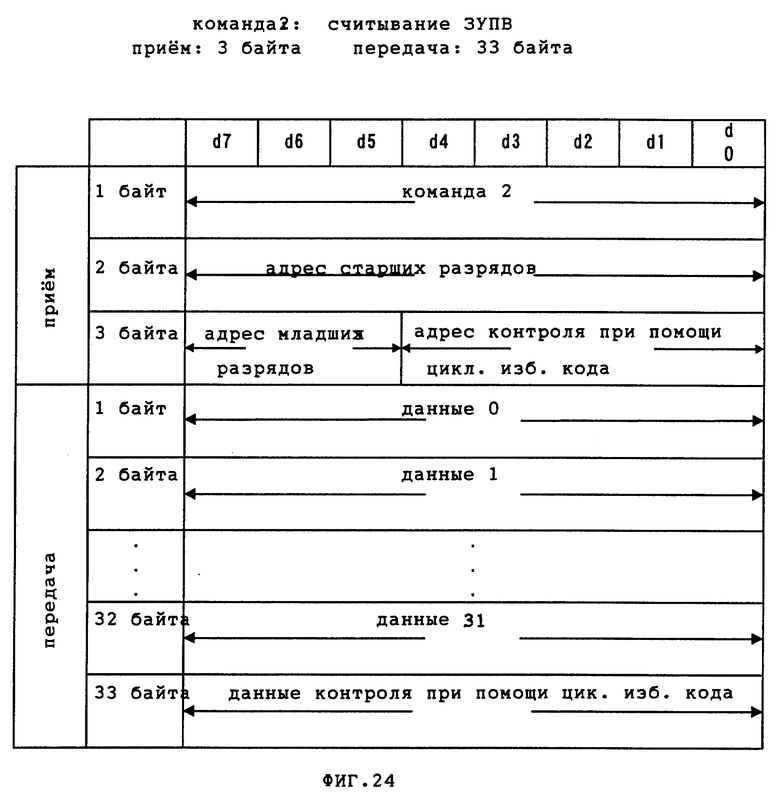
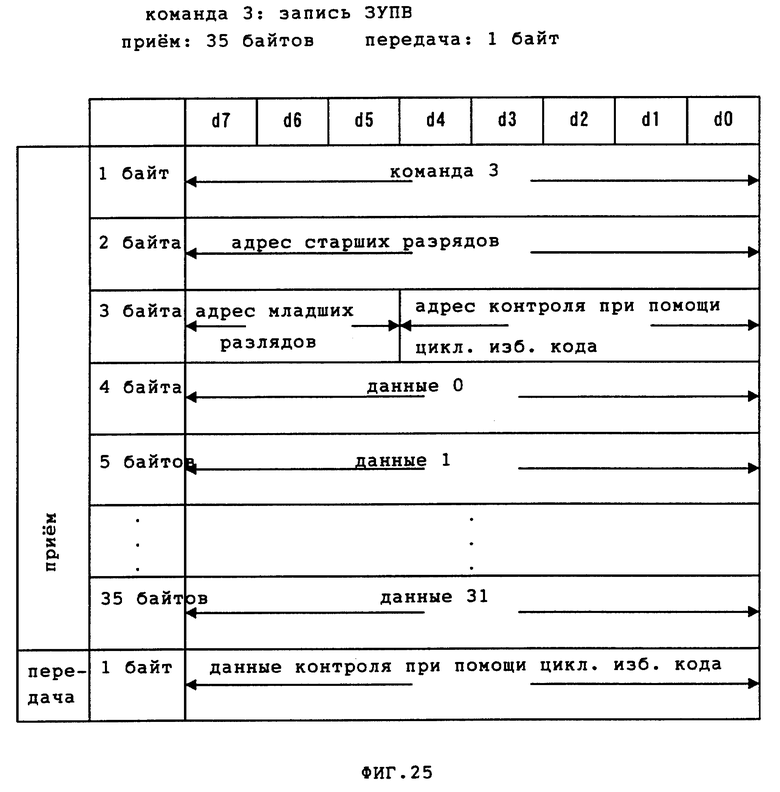
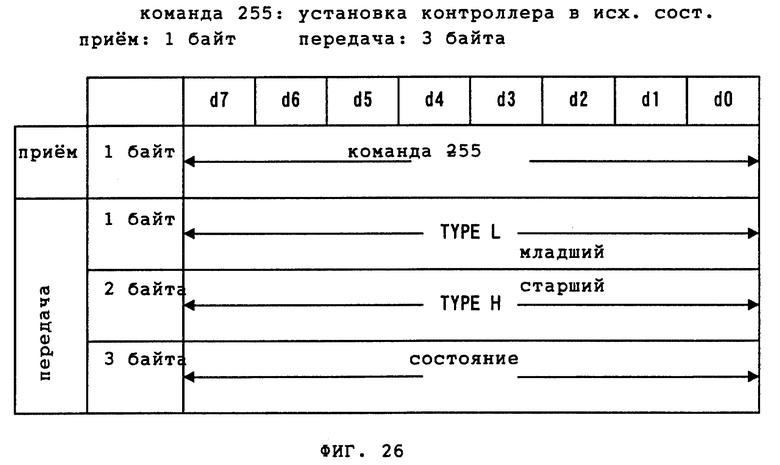
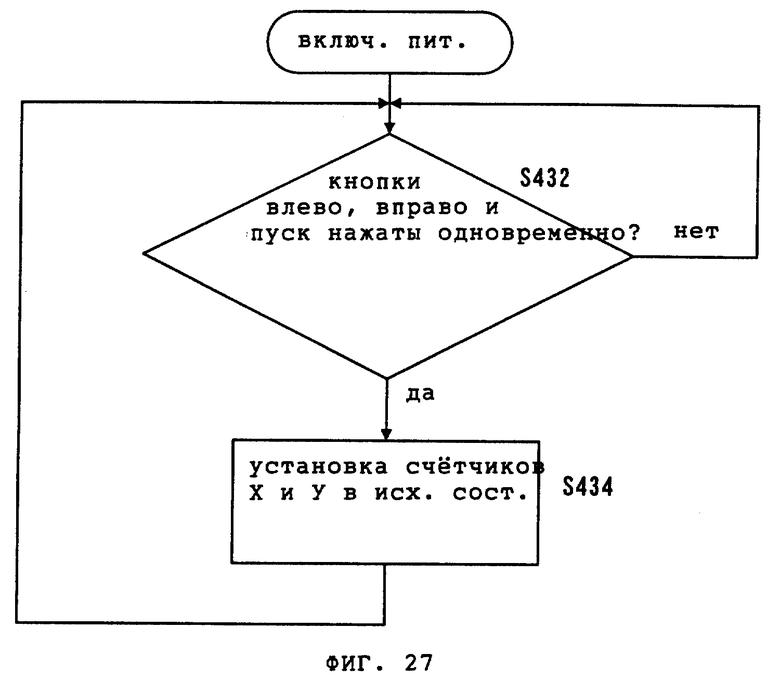
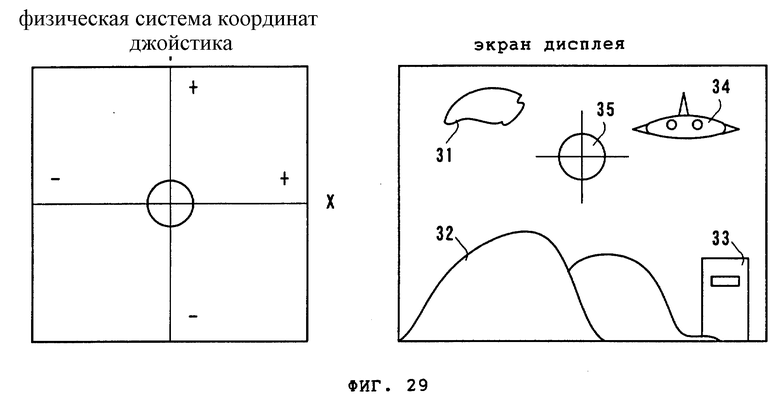
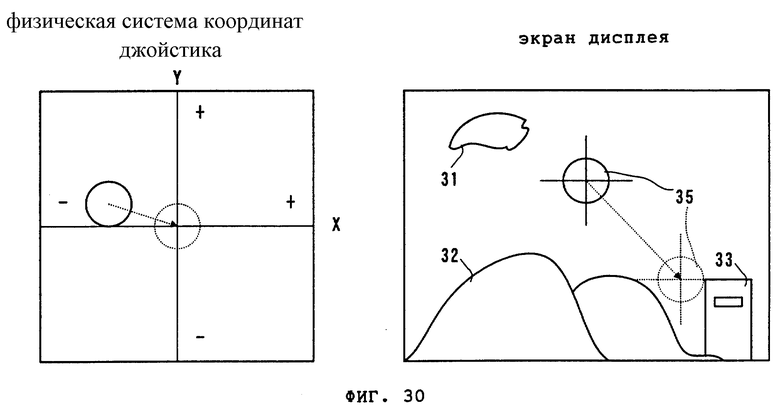
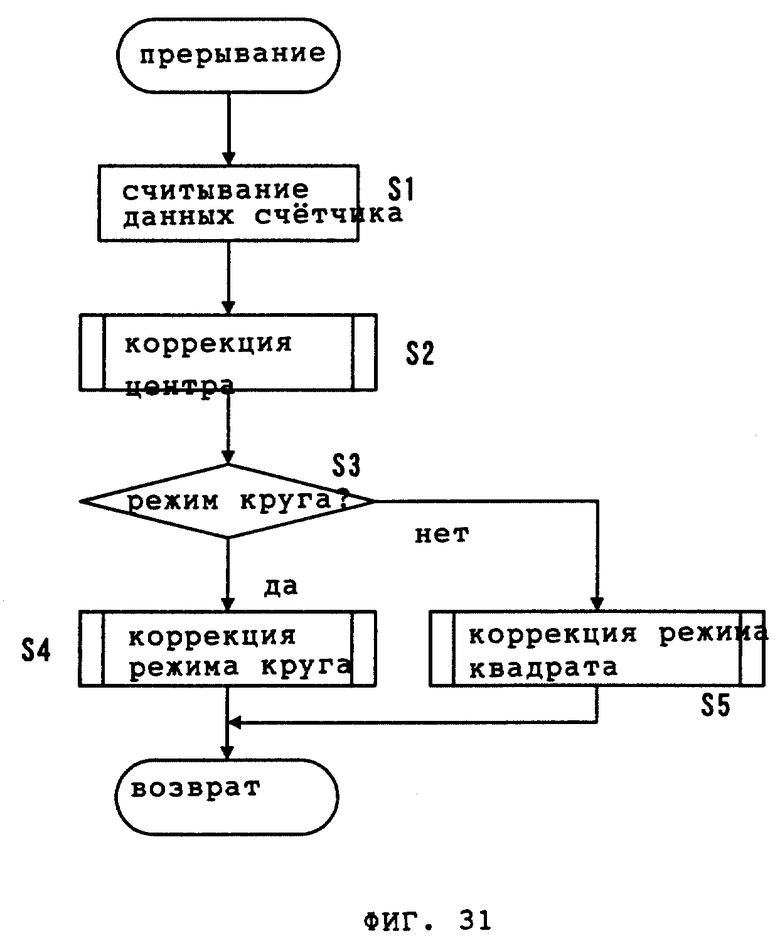
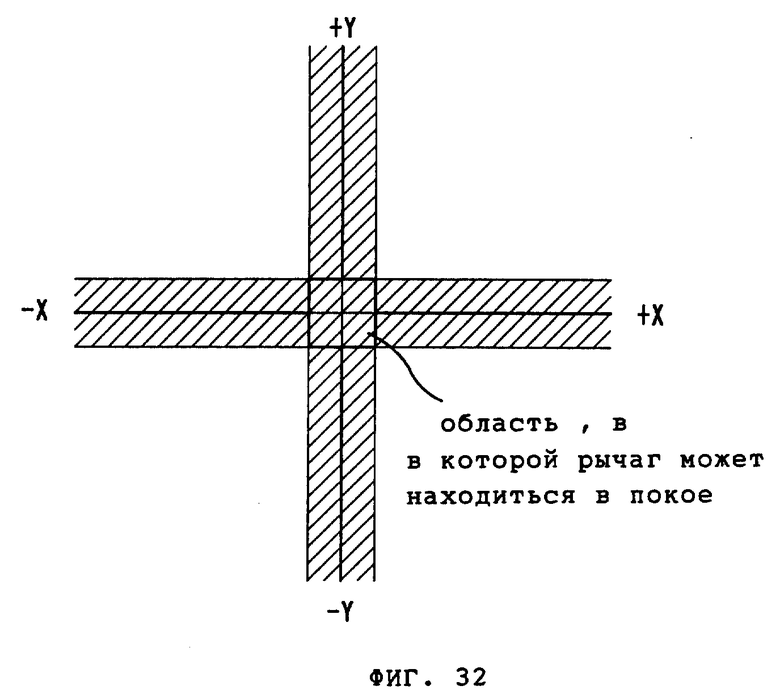
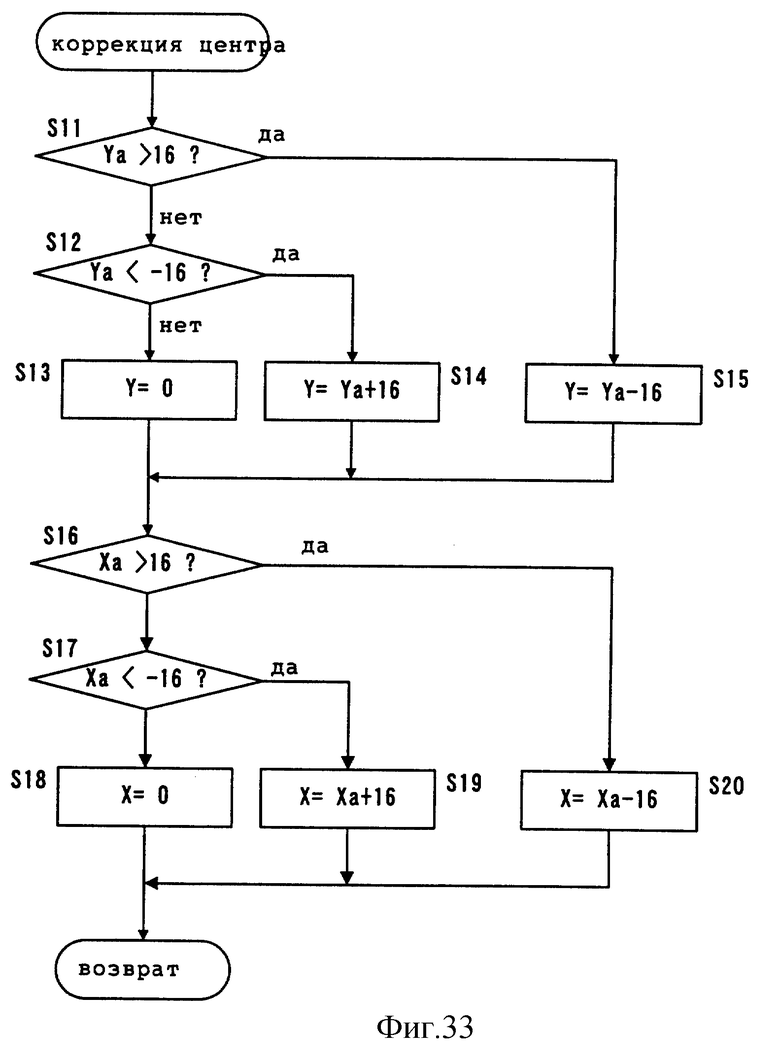
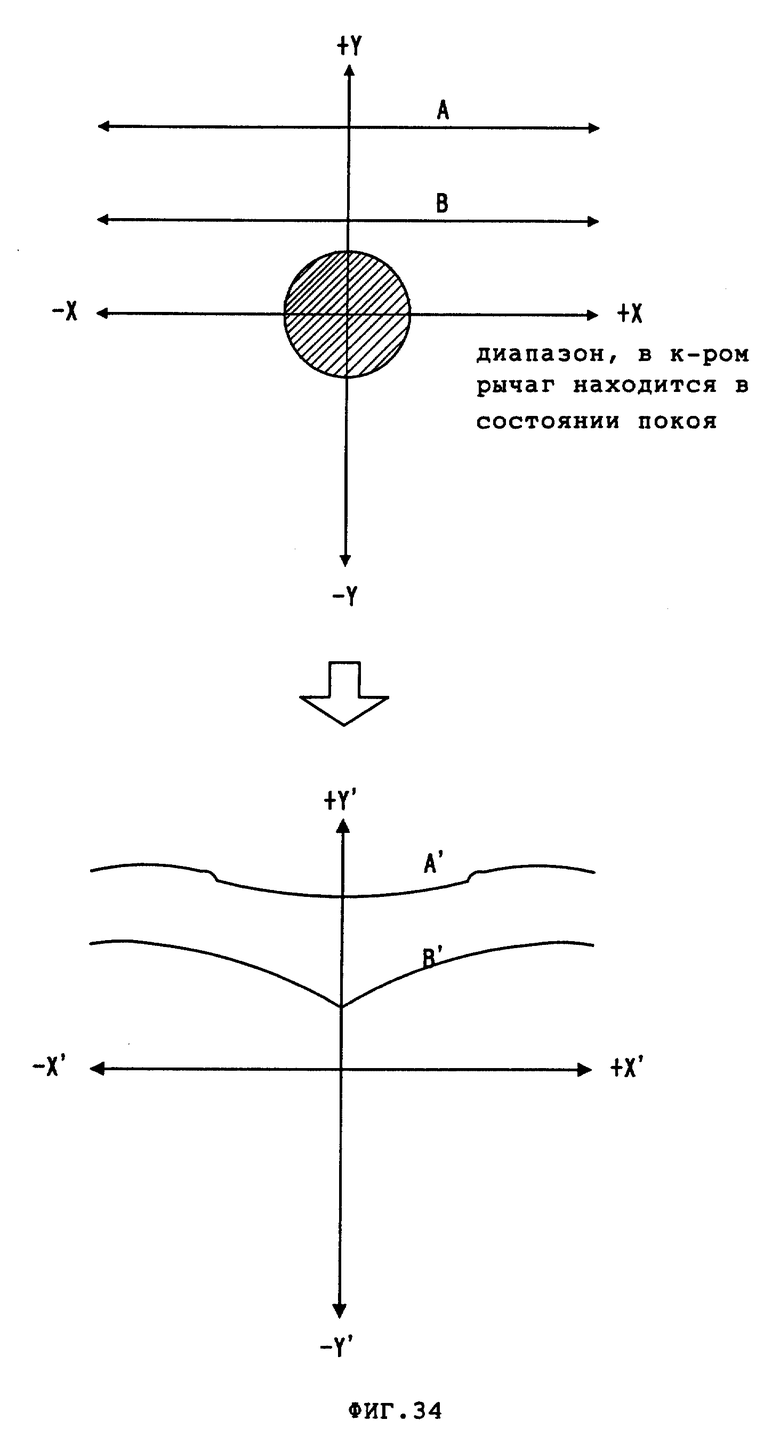
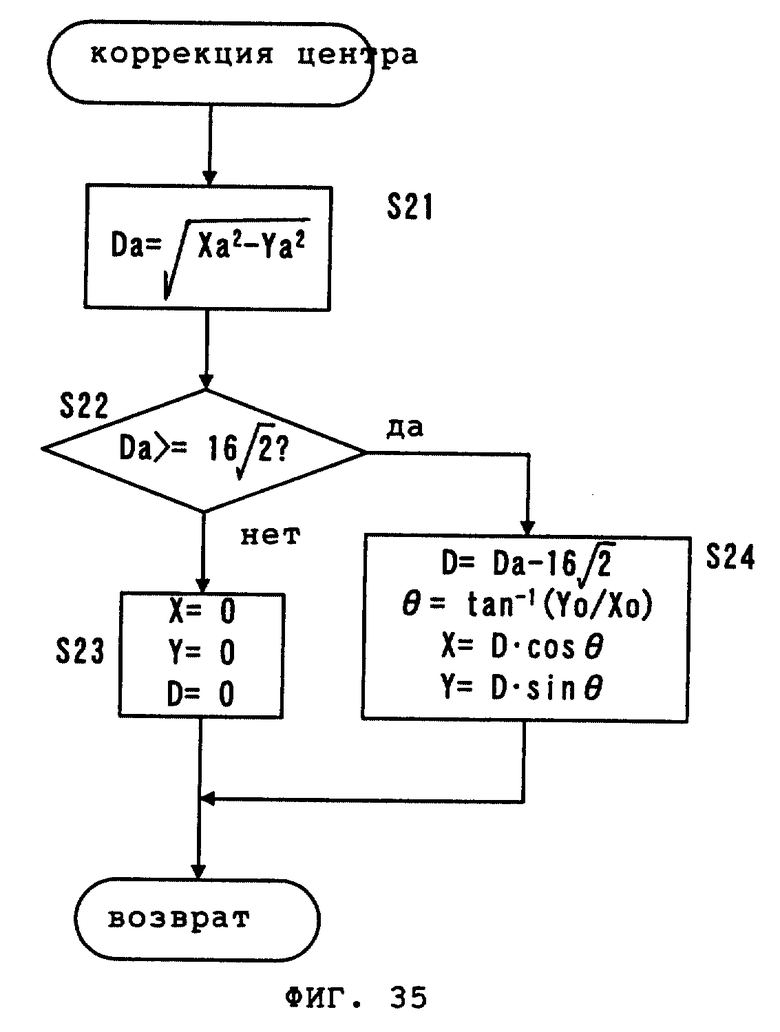
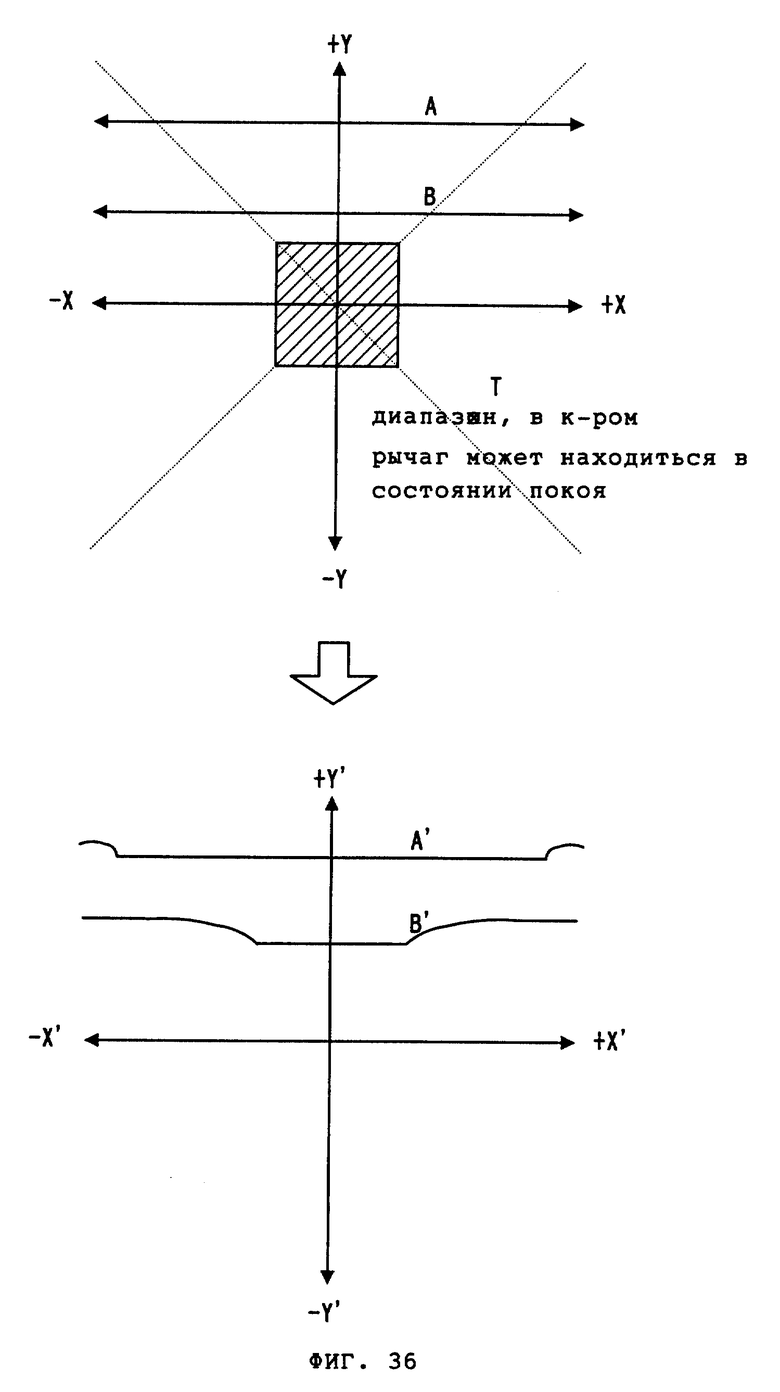
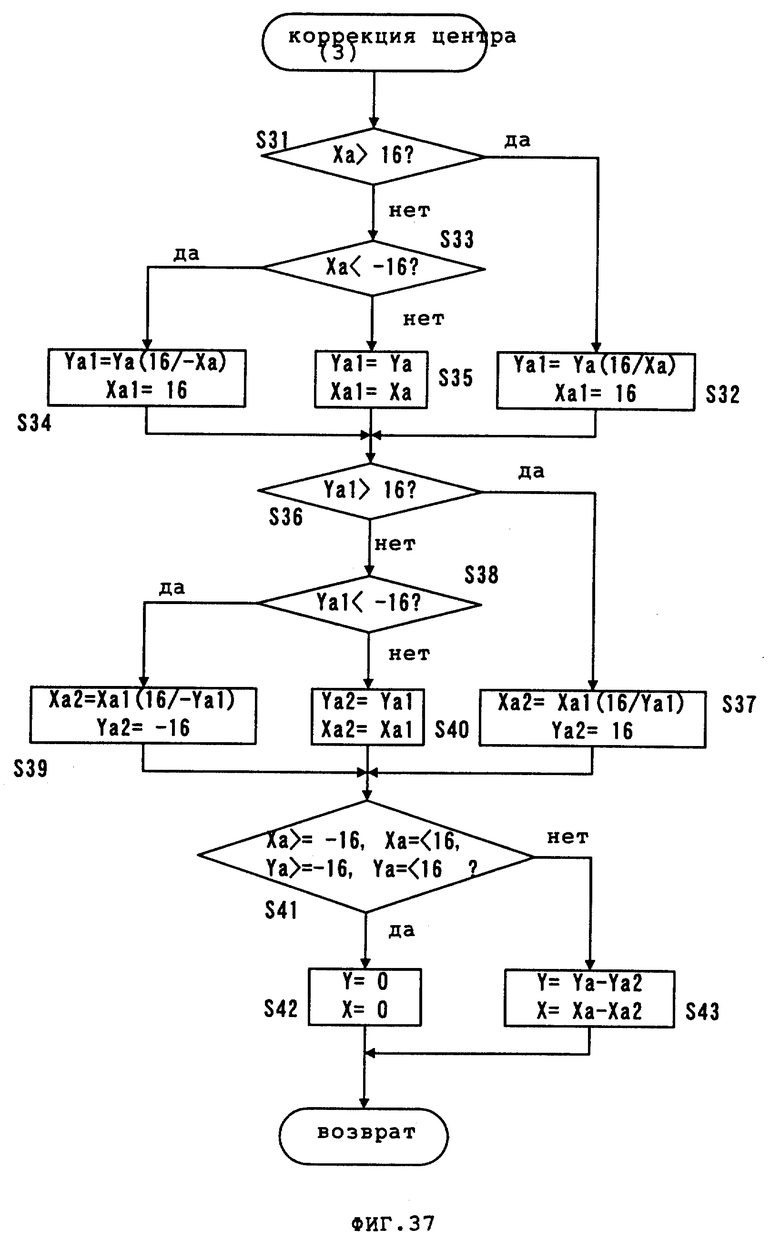
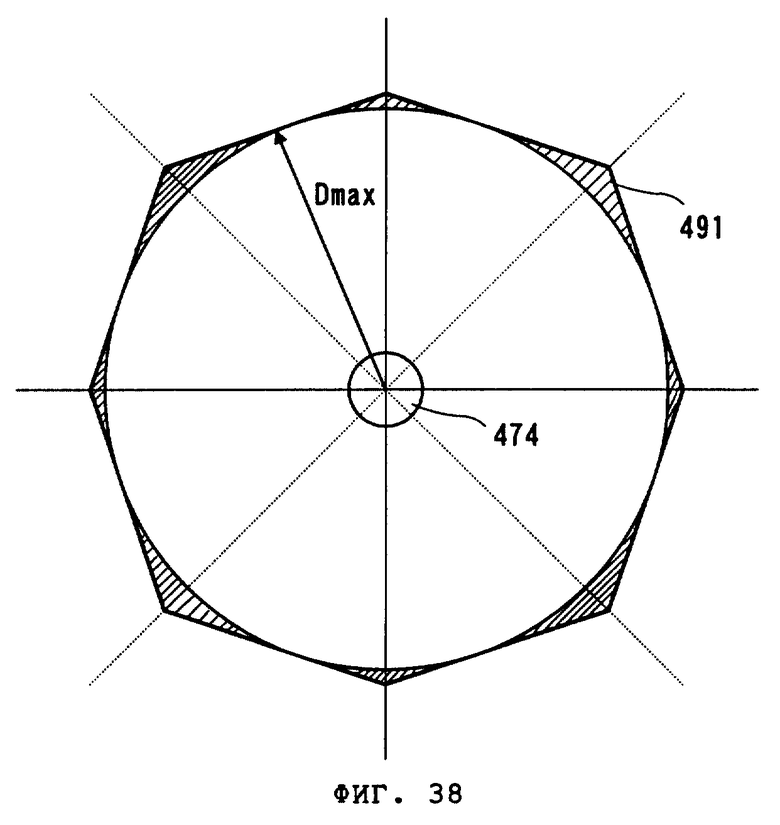
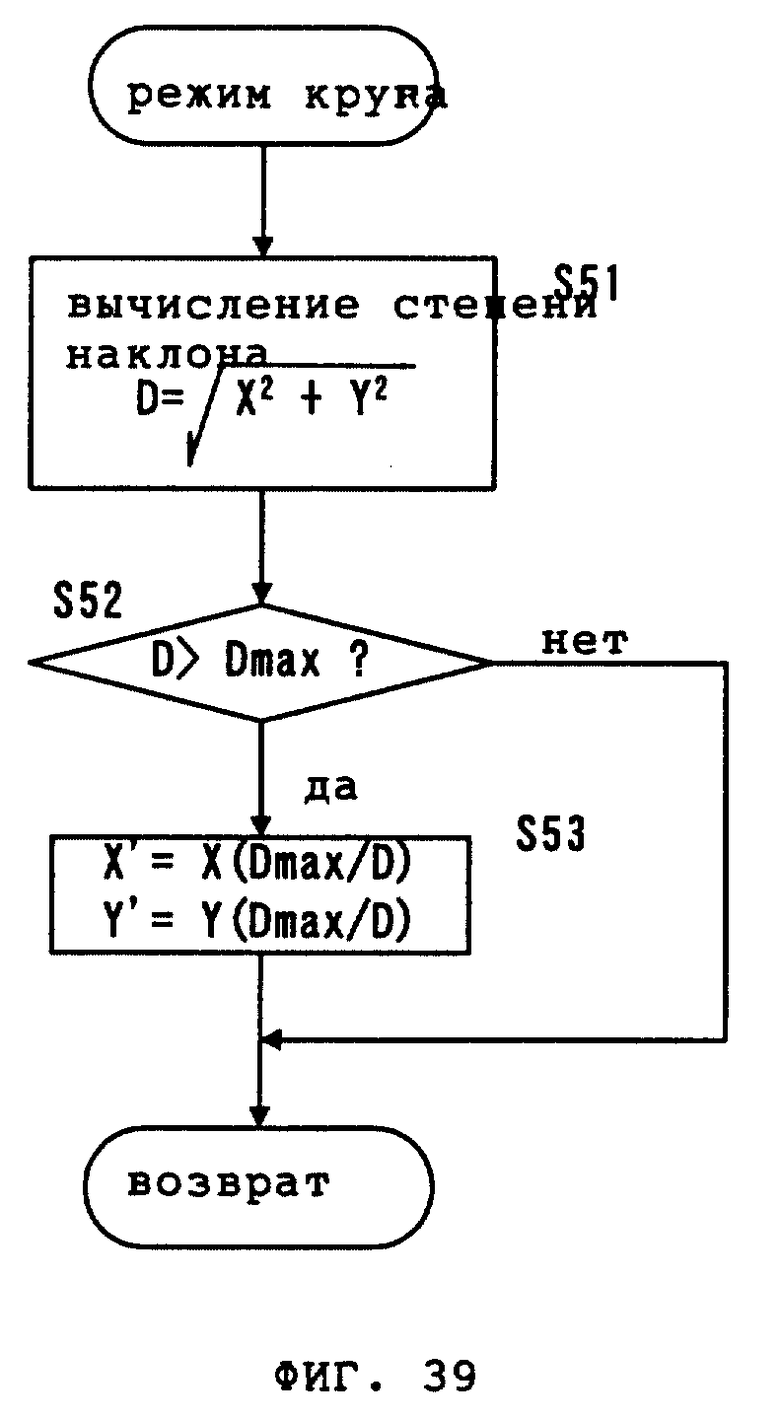
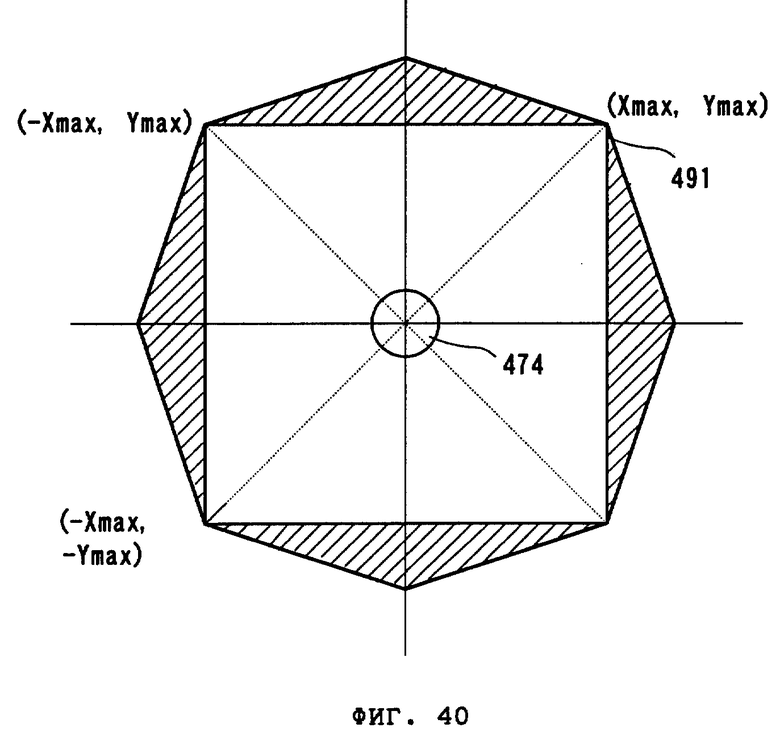
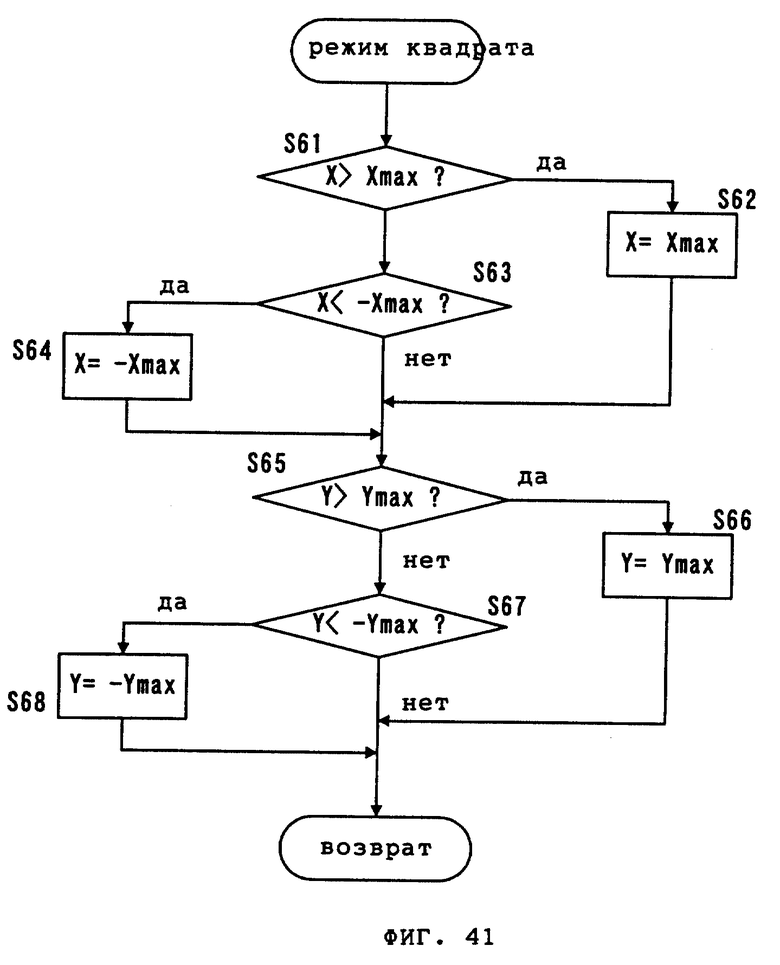
Изобретения относятся к системам обработки изображения и могут найти применение в игровых компьютерных устройствах. Техническим результатом является обеспечение увеличения диапазона наклона аналогового джойстика. Первый вариант системы обработки изображения содержит процессор изображения, выполненный с возможностью выполнения операций определения и коррекции данных, и аналоговый джойстик, включающий в себя рычаг. Второй вариант системы обработки изображения содержит дополнительно направляющий узел. Способ функционирования системы обработки изображения основан на определении на основе данных степени наклона, находится ли рычаг джойстика в мертвой зоне. 3 с. и 14 з.п.ф-лы, 41 ил.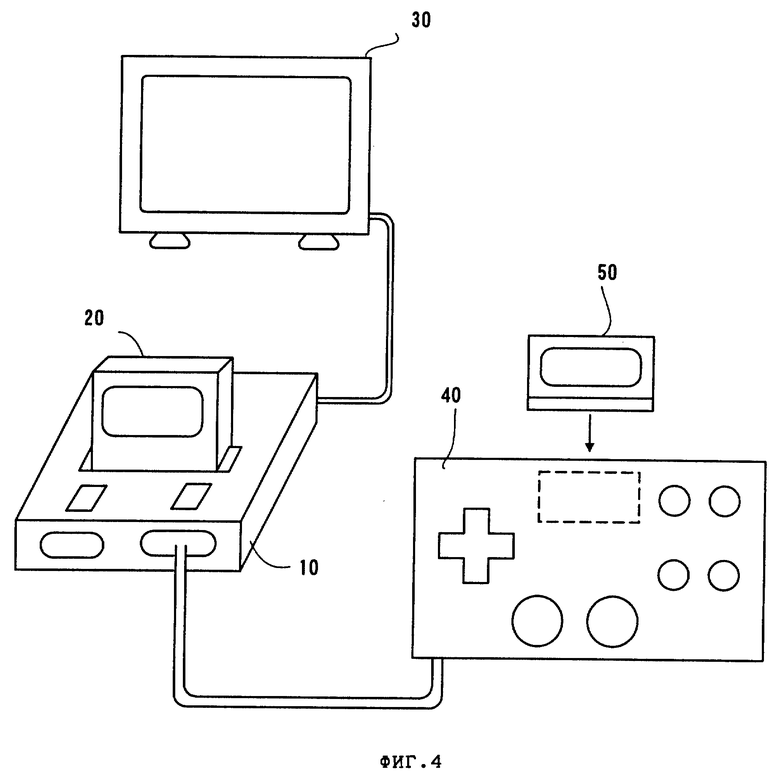
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
| ЧОГОВАДЗЕ Г.Г | |||
| Персональные компьютеры | |||
| - М.: Финансы и статистика, 1989, с.58 | |||
| Кипятильник для воды | 1921 |
|
SU5A1 |
| RU 94024377 A1, 27.04.1996. | |||

