Изобретение относится к системам для обнаружения, идентификации и слежения за объектами. Более конкретно, оно относится к обнаружению самолета, идентификации и системам управления швартовкой и к способам контроля наземного движения для обнаружения и идентификации объектов на летном поле и для безопасной и эффективной швартовки самолета в таком аэропорту.
В последние годы значительно возросло количество пассажиров, грузов и других воздушных перевозок, включая взлеты, посадки и другое наземное передвижение самолета. Имеется также заметное увеличение числа транспортных средств наземного обслуживания, которые требуются для разгрузки грузов, обеспечения обслуживания питанием, текущего технического обслуживания и содержания всех самолетов. В связи с таким значительным увеличением наземного движения возникла необходимость в более строгом контроле и безопасности при швартовке и идентификации самолета на летном поле.
Примером таких систем предыдущего уровня техники, которые были предложены для определения присутствия самолета и другого движения на летном поле были системы, раскрытые в патенте США 4995102, европейском патенте N 188757 и опубликованной заявке РСТ WO 93/15416.
Однако ни одна из этих систем не является удовлетворительной для обнаружения самолета на летном поле, в частности, при неблагоприятных климатических условиях, вызывающих пониженную видимость, например, при тумане, снеге или снеге с дождем. Более того, ни одна из систем, раскрытых в предшествующем уровне техники, не дает возможность идентификации и подтверждения особой конфигурации приближающегося самолета. К тому же никакие предшествующие системы не обеспечивают адекватные способы для слежения и швартовки самолета на определенное место остановки, например, у загрузочных ворот аэропорта. Также никакие из предшествующих систем не предлагают способы, которые дают возможность калибровки их инструментальных средств.
Таким образом, остается проблема обеспечения системами, которые достаточно безопасны и надежны даже в широком диапазоне атмосферных условий для определения объектов таких, как самолет или другой наземный транспорт на летном поле.
К тому же, имеется давно установленная необходимость в системах, которые не только дают возможность определения объектов таких, как самолет, но также обеспечивают эффективную идентификацию обнаруженного объекта и подтверждение тождественности такого объекта, например, определенного самолета, с необходимой степенью достоверности, невзирая на влияющие погодные условия и интенсивность наземного движения.
Также существует давно установленная неосуществленная необходимость в системах, которые дают возможность точно и эффективно отслеживать и направлять объекты, такие как прибывающий самолет, в подходящее место стоянки, например, загрузочные ворота аэропорта. Кроме этого, предоставление точных и эффективных способов калибровки таких систем остается проблемой, требующей решения.
Для того, чтобы преодолеть вышеописанные проблемы, требуются системы и способы, которые способны выполнять точное, безопасное, эффективное и приемлемое по стоимости обнаружение объектов таких, как самолет на летном поле, и для правильной идентификации и контроля тождественности этих объектов. Кроме того, системы и способы требуются для управления слежением и швартовкой объектов таких, как самолет, особенно в режиме работы в реальном времени. Более того, требуются системы и способы для калибровки таких действующих систем.
В соответствии с этим, основной задачей настоящего изобретения является создание таких систем и способов. В этом аспекте специальной задачей настоящего изобретения является создание систем управления швартовкой, которые способны определить точное местонахождение так же, как и подтвердить тождественность самолета на летном поле. Другой задачей изобретения является обеспечение информацией об индивидуальном контроле швартовки или стоянки самолета на летном поле с помощью дисплея, использующего связи между системой и персональным компьютером.
Следующей задачей изобретения является обеспечение безопасности цифрового точного контроля за швартовкой, а также обеспечение выполнения такого контроля чрезвычайно выгодным по стоимости образом.
Еще одной задачей является обеспечение дисплея швартующегося самолета информацией для использования пилотом, вторым пилотом или другим персоналом швартующегося самолета, включая информацию, относящуюся к расстоянию гашения скорости от подходящей точки остановки для самолета. Другой значительной задачей является обеспечение автоматического сравнения и определения того, что местоположение самолета и направление прибытия не отклоняется от заданного пути, необходимого для швартовки конкретного типа швартующегося самолета, и, в особенности, обеспечения визуальной обратной связи, что касается тормозного расстояния в рассчитанном ниже формате из расположенного в передней части самолета дисплея, который содержит расстояние для швартовки, позицию влево или вправо по отношению к соответствующей центральной линии для швартовки и проверку типа самолета.
Еще одной задачей настоящего изобретения является предложение систем, которые не только обеспечивают или пилоту или второму пилоту управление азимутом, но также обеспечивают просмотр площадки для возможности подходящей и безопасной швартовки самолета. Другой задачей является создание систем, особенно чувствительных для достижения точных позиций парковки с чрезвычайно маленькими допусками.
Следующей задачей является создание систем, которые являются чрезвычайно гибкими и допускают введение новых рабочих параметров таких, как добавление новых типов самолетов, попеременная или вторичная позиции конечной парковки и другая соответствующая информация, относящаяся к идентификации, управлению и швартовке самолета на летном поле.
Поставленные задачи решаются тем, что система проверки формы обнаруженного объекта, согласно изобретению, содержит
средство проецирования световых импульсов в угловых координатах на объект и
средство сбора световых импульсов, отраженных от объекта и определения формы обнаруженного объекта,
средство сравнения формы обнаруженного объекта с профилем, соответствующим форме известного объекта, и определения соответствия обнаруженной формы известной форме,
средство направления спроецированных световых импульсов на калибровочный элемент, расположенный в известном угловом направлении и на известном расстоянии от средства направления спроецированных световых импульсов для калибровки системы, причем средство направления спроецированных световых импульсов содержит зеркальную систему.
В системе, согласно изобретению,
средство для проецирования световых импульсов и сбора световых импульсов может быть выполнено в виде лазерного дальномера,
средство для сравнения формы обнаруженного объекта и определения соответствия обнаруженной формы известной форме - в виде микропроцессора.
Система, согласно изобретению, может содержать средство регулирования зеркальной системы для проецирования световых импульсов наружу.
Система, согласно изобретению, может содержать шаговые двигатели, управляемые микропроцессором, для приведения в действие зеркальной системы.
В системе, согласно изобретению, микропроцессор может быть выполнен с возможностью суммирования количества отраженных световых импульсов при каждом сканировании зоны захвата, определения наибольшей суммы отраженных световых импульсов для трех соседних секторов, и определения, что объект обнаружен, если наибольшая сумма отраженных световых импульсов для трех соседних секторов является, по меньшей мере, заданным минимальным количеством от общего количества световых импульсов, спроецированных внутри трех соседних секторов, а количество отраженных световых импульсов в трех секторах с наибольшей суммой больше, чем половина от общего количества отраженных световых импульсов при сканировании зоны захвата.
Система, согласно изобретению, дополнительно может включать в себя средство слежения за объектом, причем средство слежения может содержать средство определения положения объекта по отношению к воображаемой осевой линии, спроецированной из заданной точки, и расстояния между объектом и заданной точкой.
В системе, согласно изобретению, микропроцессор может быть выполнен с возможностью генерирования сравнительной таблицы, содержащей информацию о принятых световых импульсах, которая сравнивается с таблицей профиля, показывающей форму известных объектов, генерирования таблицы распределения расстояний, записывающей распределение расстояний от объекта до средства сбора для каждого принятого светового импульса и расчета среднего расстояния от определенного положения объекта до требуемого положения остановки объекта.
В системе, согласно изобретению, микропроцессор может быть выполнен с возможностью расчета среднего расстояния до положения остановки путем усреднения расстояния до положения остановки, записанного для графы в сравнительной таблице, соответствующей двум соседним графам в таблице распределения расстояний, имеющих наибольшую сумму.
Система, согласно изобретению, может содержать датчик, принимающий световые импульсы, отражаемые от калибровочного элемента и микропроцессор может быть выполнен с возможностью определения углового направления световых импульсов калибровочного элемента по отношению к средству проецирования на основании световых импульсов, принятых датчиком и в соответствии с заданными угловыми параметрами, и сравнения определенного углового направления с известным угловым направлением для определения соответствия определенного углового направления известному угловому направлению.
В системе, согласно изобретению, микропроцессор может быть выполнен с возможностью регулировки угловых параметров, если определенное угловое направление и известное угловое направление не совпадают до получения соответствия определенного углового направления известному угловому направлению.
В системе, согласно изобретению, микропроцессор может быть выполнен с возможностью определения расстояния калибровочного элемента от средства проецирования световых импульсов на основе заданных параметров расстояния и сравнения определенного расстояния с известным расстоянием калибровочного элемента от источника света для определения соответствия определенного расстояния известному расстоянию.
В системе, согласно изобретению, микропроцессор может быть выполнен с возможностью регулировки параметров расстояния, если определенное расстояние и известное расстояние не совпадают до получения соответствия определенного расстояния известному угловому расстоянию.
В системе, согласно изобретению, микропроцессор может быть выполнен с возможностью калибровки углового направления и расстояния калибровочного элемента от средства направления спроецированных световых импульсов в горизонтальной плоскости, и поддержания постоянным углового направления и расстояния калибровочного элемента от средства направления спроецированных световых импульсов в вертикальной плоскости.
Поставленные задачи решаются также тем, что система слежения за объектом, согласно изобретению, содержит средство для генерирования световых импульсов, средство для проецирования световых импульсов наружу на объект и для отражения световых импульсов от объекта, средство дли приема световых импульсов, отраженных от объекта, выполненные в виде лазерного дальномера, и средство для определения положения по отношению к воображаемой осевой линии, спроецированной от заданной точки, и для определения расстояния между объектом и заданной точкой, выполненное в виде микропроцессора, причем микропроцессор выполнен с возможностью генерирования сравнительной таблицы, отражающей информацию о лазерном сканировании и сравнивания с таблицей профиля, показывающей форму известных объектов, генерирования таблицы распределения расстояния, записывающей распределение расстояний от носа объекта до измерительного устройства для каждого отраженного импульса, и вычисления среднего расстояния до требуемого положения остановки.
В системе слежения, согласно изобретению, микропроцессор может быть выполнен с возможностью вычисления среднего расстояния до положения остановки посредством усреднения расстояния до положения остановки, записанного для графы в сравнительной таблице, соответствующей двум соседним графам в таблице распределения расстояния, имеющим наибольшую сумму.
Система слежения, согласно изобретению, может содержать дисплей, показывающий расстояние от объекта до точки остановки, тип объекта и местонахождение объекта по отношению к центру.
Поставленные задачи решаются также тем, что система управления идентификацией и швартовкой объекта для проверки формы обнаруженного самолета согласно изобретению содержит регулируемую невращающуюся систему зеркал, включающую в себя первое зеркало для непрерывного проецирования световых импульсов наружу в горизонтальной плоскости угловых координат на объект и второе зеркало для непрерывного проецирования световых импульсов наружу в вертикальной плоскости угловых координат на объект, средство для приема световых импульсов, отраженных от объекта и для определения формы объекта, и средство для сравнения определенной формы с профилем, соответствующим форме известного объекта и для определения, соответствует ли определенная форма известной форме.
Система управления идентификацией и швартовкой объекта, согласно изобретению, дополнительно может содержать средство для направления спроецированных световых импульсов на калибровочный элемент, расположенный в известном угловом направлении и на известном расстоянии от средства направления спроецированных световых импульсов для калибровки системы.
Поставленные задачи решаются тем, что в способе проверки формы обнаруженного объекта, согласно изобретению, проецируют световые импульсы в угловых координатах на объект, отражают световые импульсы обратно к датчику и определяют форму объекта на основании отраженных импульсов, сравнивают определенную форму с профилем, соответствующим форме известного объекта, определяют, соответствует ли определенная форма известной форме, направляют спроецированные световые импульсы на калибровочный элемент, расположенный в известном угловом направлении и на известном расстоянии от средства направления спроецированных световых импульсов для калибровки указанной системы, причем направление спроецированных световых импульсов осуществляют с помощью системы зеркал.
В способе, согласно изобретению, профиль, соответствующий форме известного объекта, представляют набором ожидаемых отраженных импульсов при различных расстояниях от точки остановки.
В способе, согласно изобретению, микропроцессор программируют для идентификации объекта.
В дальнейшем изобретение поясняется наилучшими вариантами его воплощения со ссылками на сопроводительные чертежи, на которых:
фиг. 1 изображает вид, показывающий систему, которая используется в аэропорту,
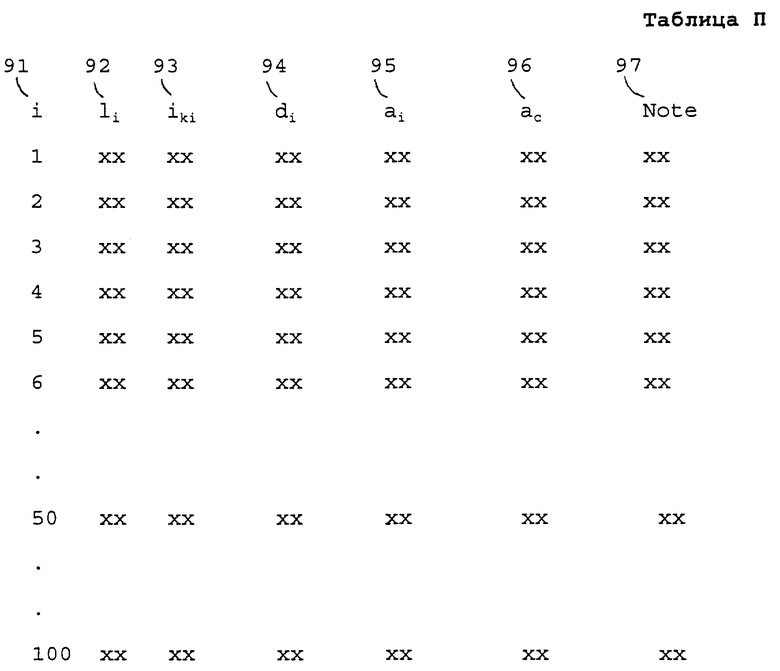
фиг. 2 изображает схематический вид, показывающий основную составляющую предпочтительной системы в соответствии с настоящим изобретением,
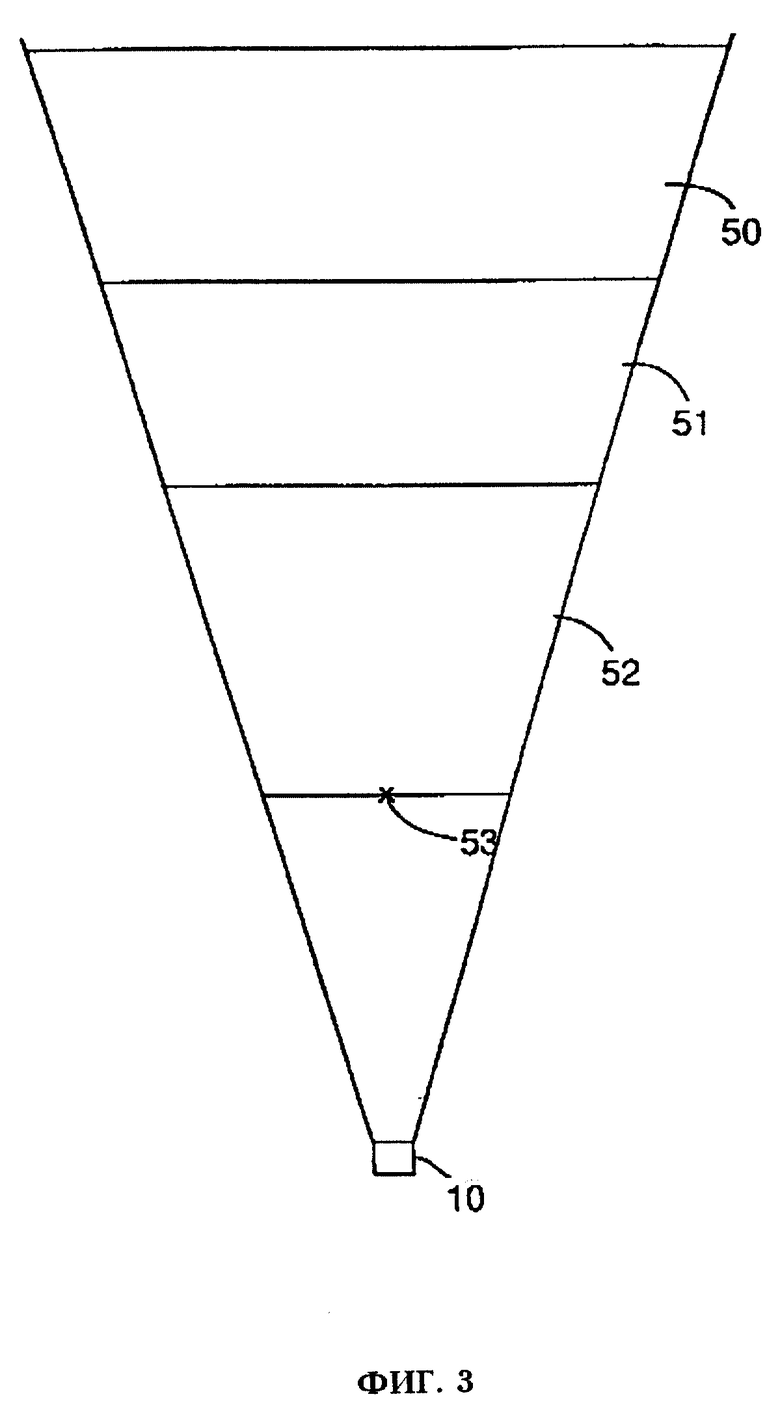
фиг. 3 изображает вид сверху, показывающий участок обнаружения перед воротами швартовки, который устанавливается с целями обнаружения и идентификации приближающегося объекта,
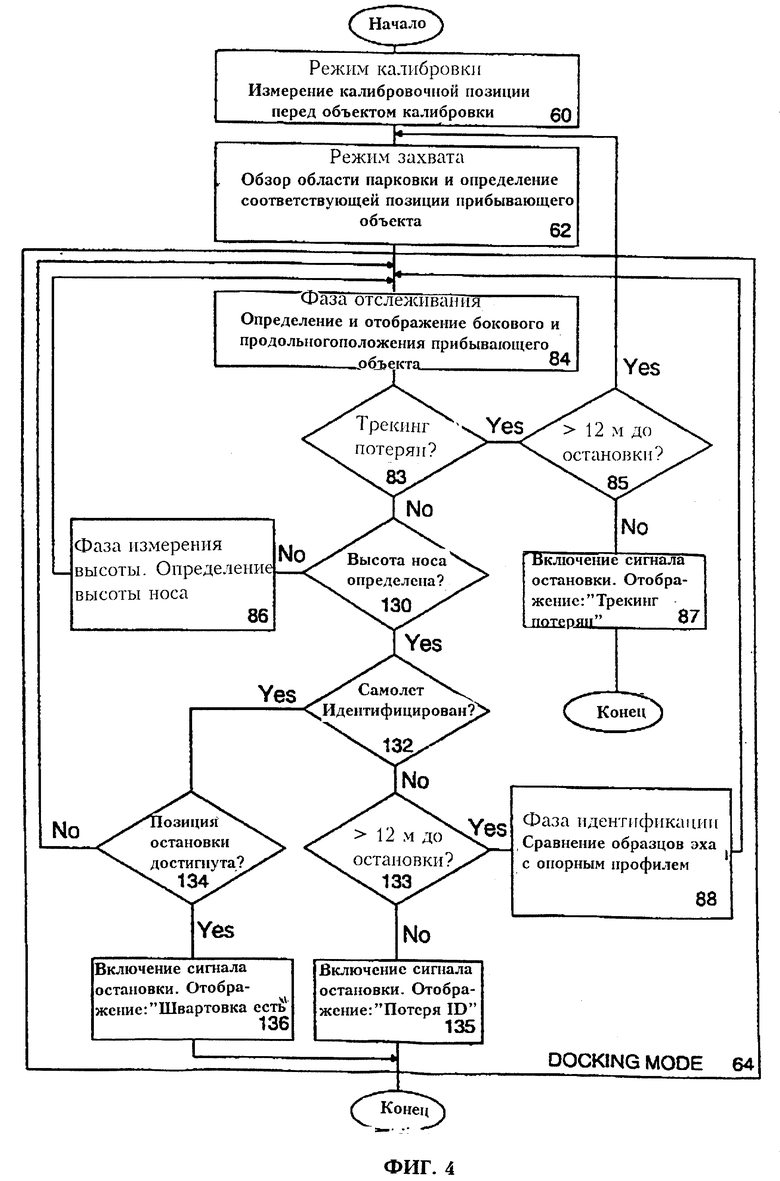
фиг. 4 изображает блок-схему, показывающую основную программу и режим швартовки в системе,
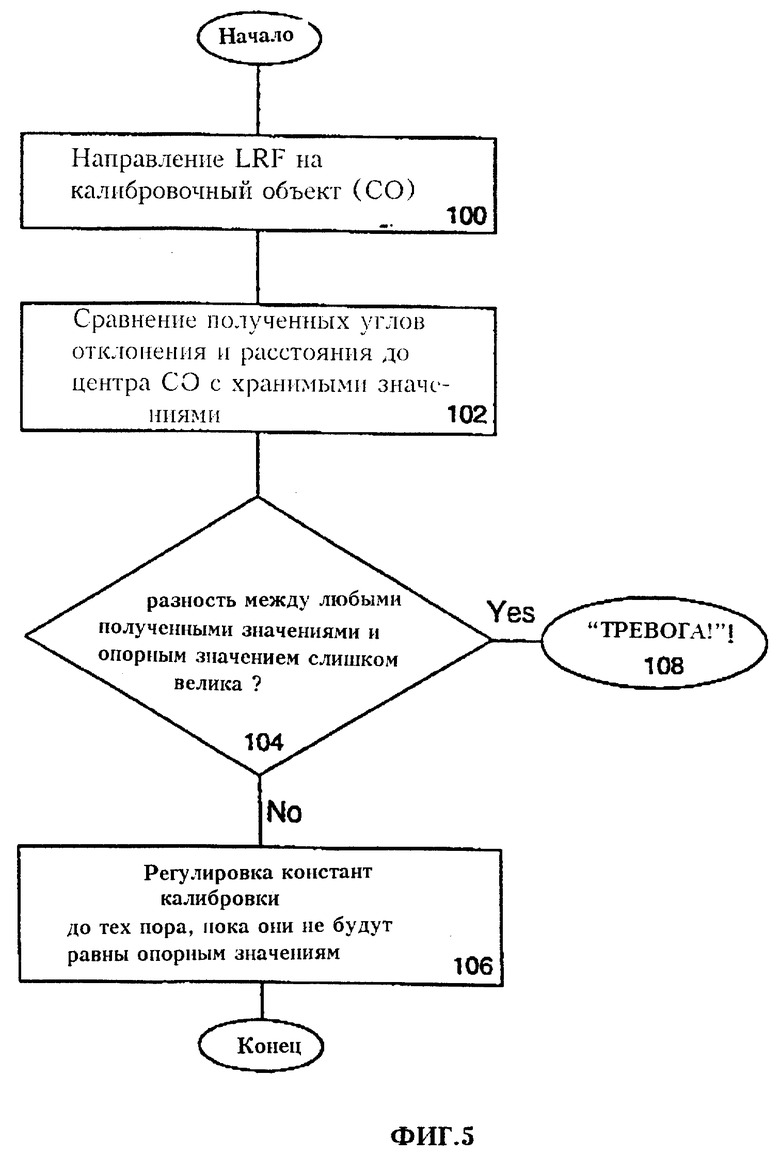
фиг. 5 изображает блок-схему, показывающую режим калибровки системы,
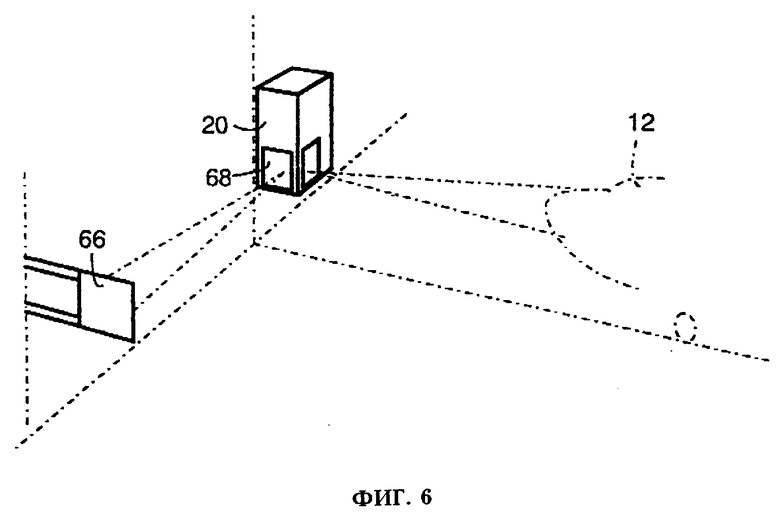
фиг. 6 изображает вид, показывающий составляющие режима калибровки,
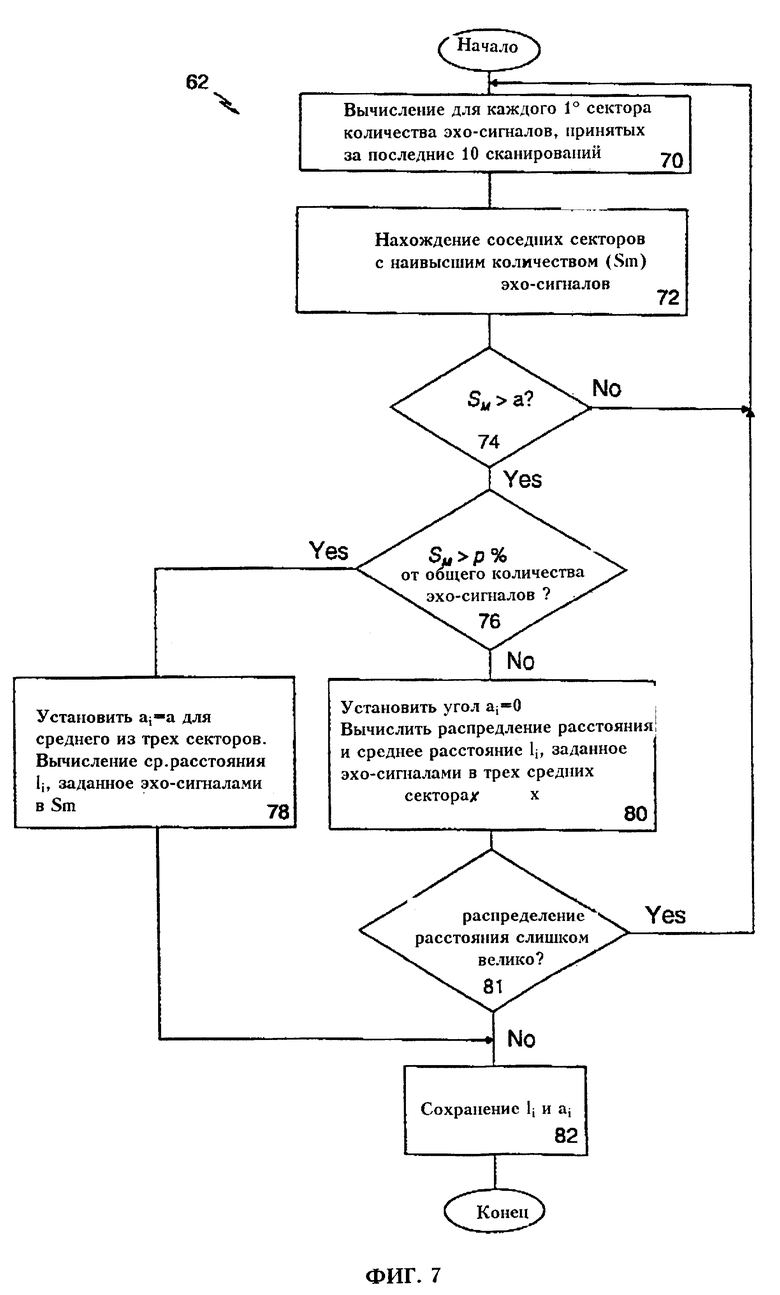
фиг. 7 изображает блок-схему, показывающую режим захвата системы,
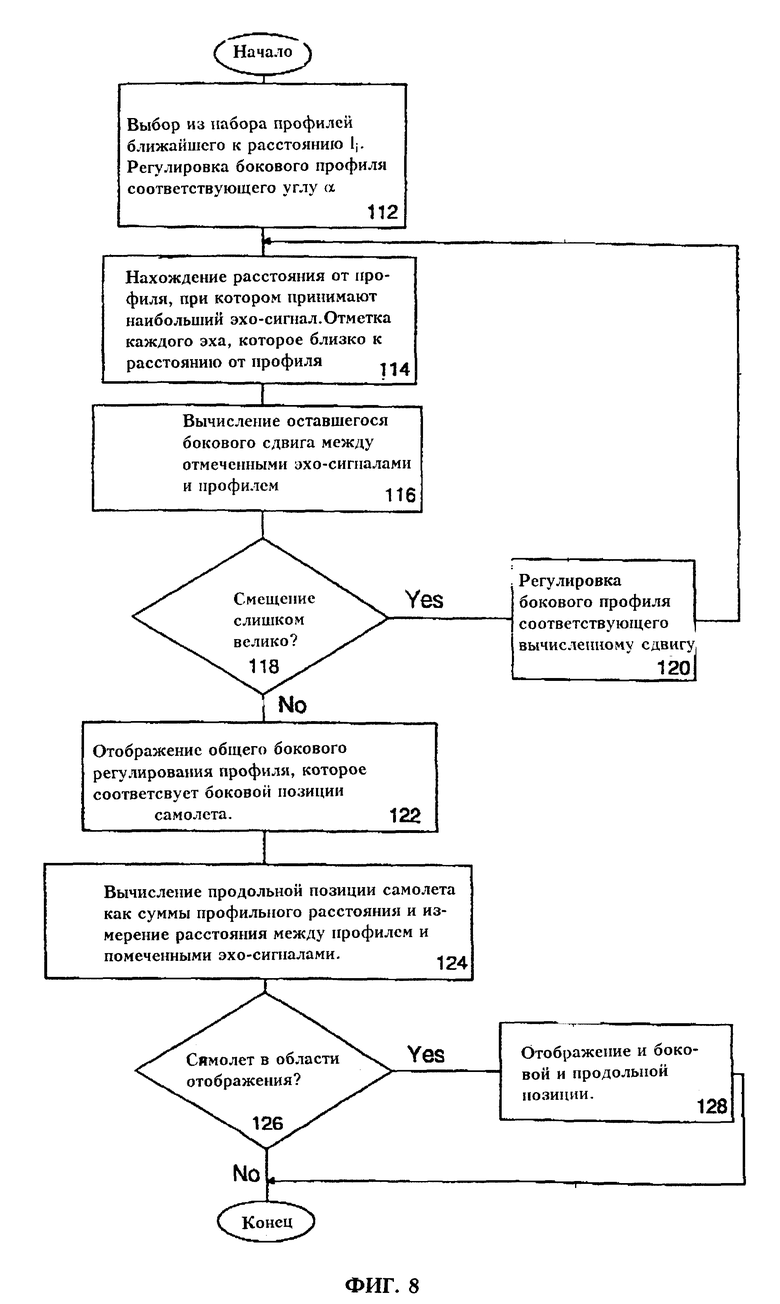
фиг. 8 изображает блок-схему, показывающую фазу слежения системы,
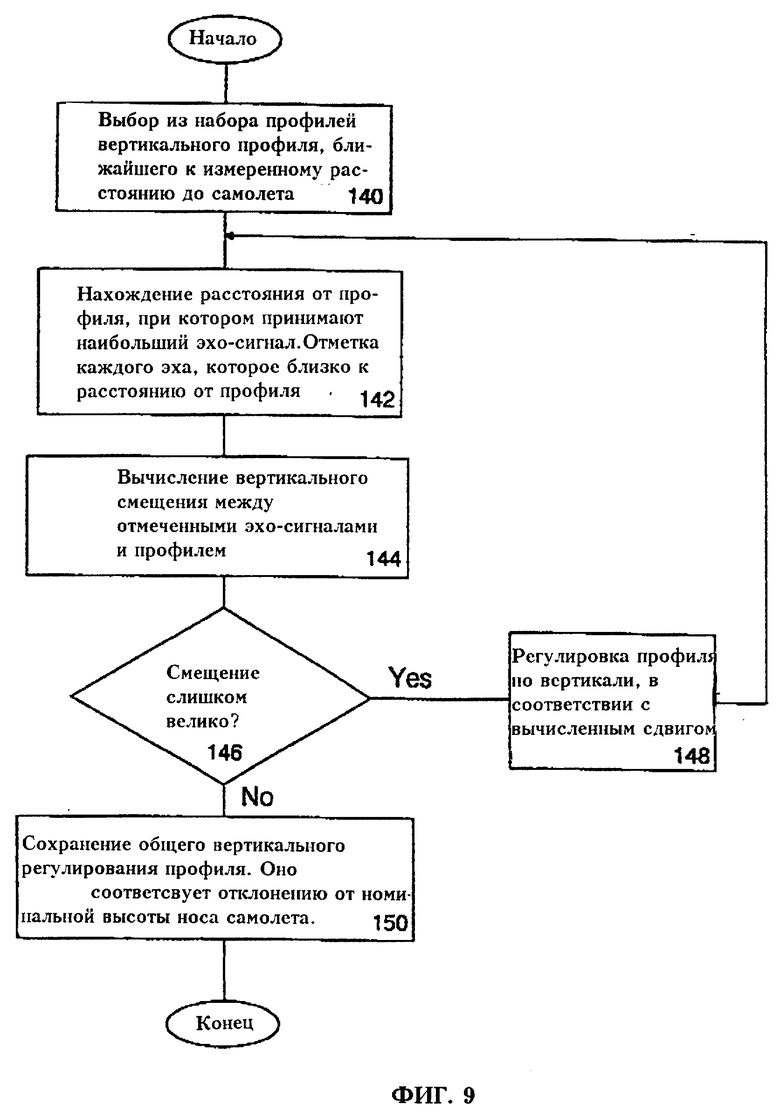
фиг. 9 изображает блок-схему, показывающую фазу измерения высоты в системе,
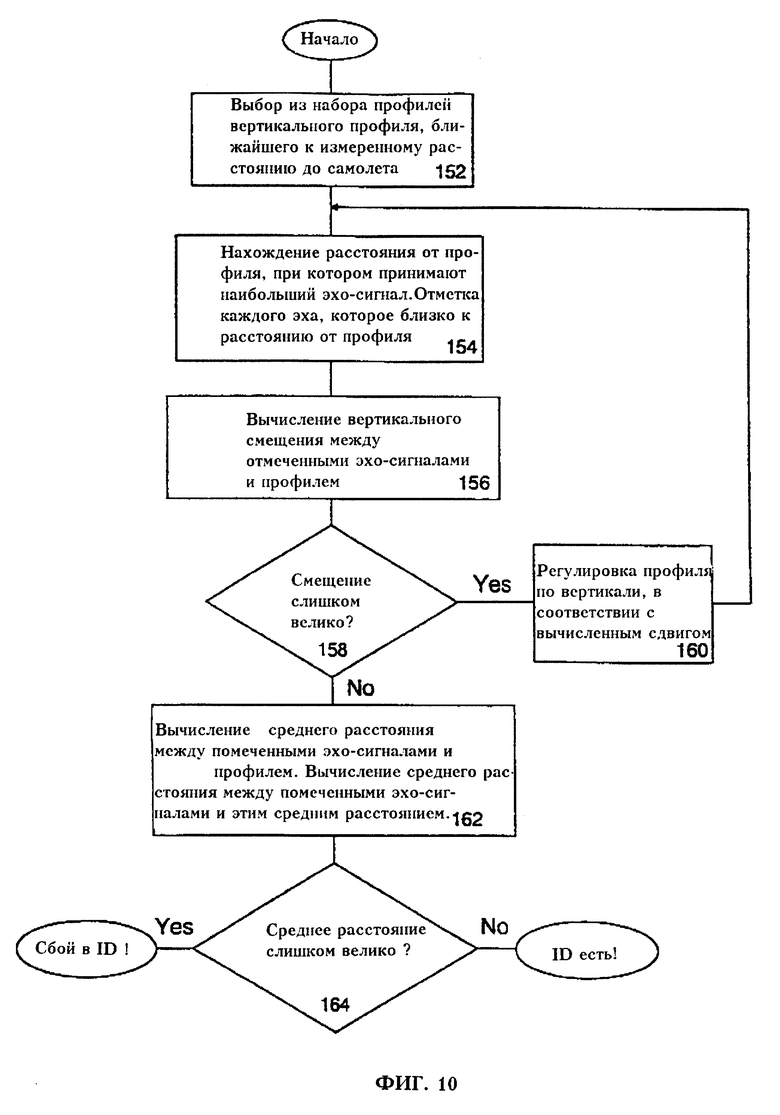
фиг. 10 изображает блок-схему, показывающую фазу идентификации системы.
Таблица I отражает предпочтительное исполнение таблицы горизонтального опорного профиля, которая применяется для установления тождественности объекта в системах, согласно настоящему изобретению.
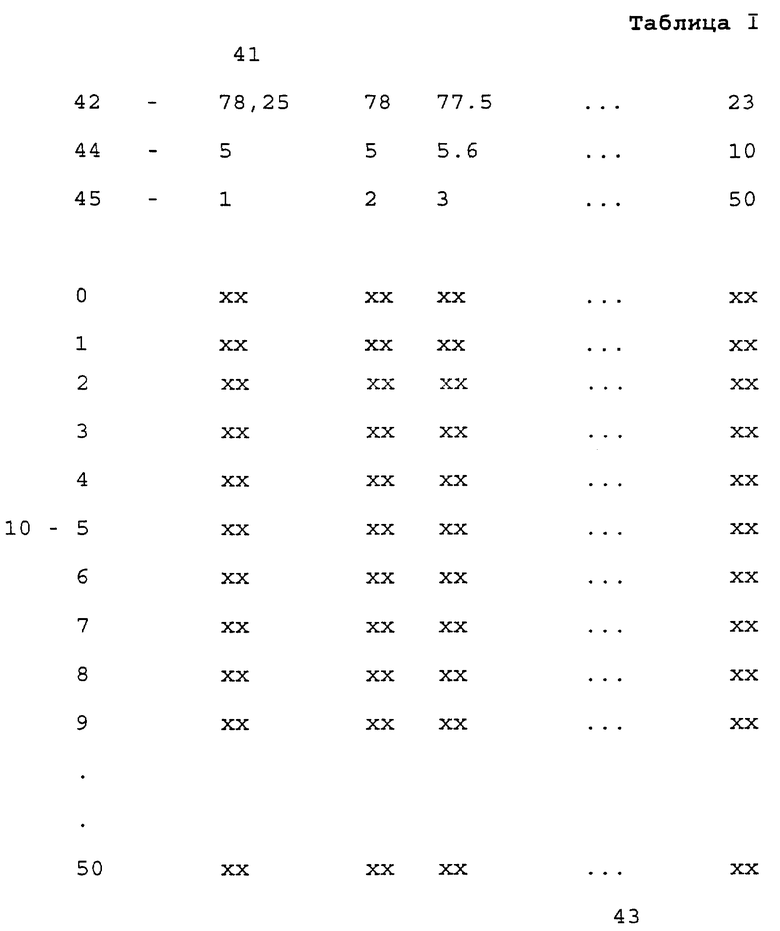
Таблица II - это предпочтительное исполнение сравнительной таблицы, которая используется в системах настоящего изобретения с целями эффективной и действенной швартовки объекта.
На фиг. 1 - 10 и таблицах I - II одинаковые цифры обозначают одинаковые элементы на различных чертежах. Во всем последующем подробном описании пронумерованные этапы, обозначенные на изображенных блок-схемах, в основном указаны номерами элементов в круглых скобках с последующими такими ссылками.
На фиг. 1 системы согласно настоящему изобретению, в общем обозначенные позицией 10, обеспечивают компьютеризированное определение местоположения объекта, подтверждение идентичности объекта и отслеживание объекта, в частности, объектом является самолет 12. При работе, после того как командно-диспетчерский пункт 14 сажает самолет 12, он информирует систему, что самолет приближается к воротам 16 и предполагаемый тип самолета (например, 747, L-1011 и т.д.). Система 10 сканирует участок перед воротами 16, пока не обнаружит объект, который она идентифицирует как самолет 12. Система 10 затем сравнивает профиль самолета 12 с опорным профилем для ожидаемого типа самолета. Если обнаруженный самолет не совпадает с ожидаемым профилем, система информирует или сигнализирует командно-диспетчерскому пункту 14 и прекращает работу.
Если объект является ожидаемым самолетом 12, то система 10 направляет его в ворота 16 посредством показа в реальном времени пилоту расстояния, остающегося до заданной точки 29 остановки, и боковую позицию 31 самолета 12. Боковая позиция 31 самолета 12 выдается на дисплей 18, позволяя пилоту корректировать местоположение самолета при приближении к воротам 16, исходя из правильного угла. Когда самолет 12 находится в точке 53 остановки, этот факт отображается на дисплее 18, и пилот останавливает самолет. Применяя систему 10 согласно настоящему изобретению, необходимо отметить, что когда самолет 12 прибывает для стоянки, он находится точно на одной линии с воротами 16, не требуя регулировки ворот 16 штатом наземного обслуживания.
Система 10 (фиг. 2) содержит средство проецирования световых импульсов в угловых координатах и сбора световых импульсов, отраженных от объекта, и определение формы объекта, выполненное в виде лазерного дальномера (LRF) 20, средство направления спроецированных импульсов, содержащее зеркальную систему 21, 22, устройство отображения - дисплей 18, два шаговых двигателя 24, 25 и средство сравнения формы обнаруженного объекта и определения соответствия известной форме в виде микропроцессора 26. Подходящие LRF изделия для данного использования продаются фирмой Laser Atlanta Corporation, и способны испускать лазерные импульсы и принимать отражения этих импульсов, отраженные от удаленных объектов, и рассчитывать расстояния до этих объектов.
Система 10 устроена таким образом, что существует соединение 28 между последовательным портом лазерного дальномера 20 и микропроцессором 26. Через это соединение лазерный дальномер 20 посылает данные измерения приблизительно каждую 1/400 долю секунды к микропроцессору 26. Компоненты аппаратуры, в целом обозначенные позицией 23 системы 10, управляются программируемым микропроцессором 26. Микропроцессор 26 выдает данные на дисплей 18. В качестве интерфейса с пилотом дисплей 18 расположен над воротами 16 для того, чтобы показать пилоту, как далеко самолет находится от точки 29 его остановки, тип 30 самолета, к которому, как предполагает система, близок самолет, и боковое положение самолета 31. Используя этот дисплей, пилот может регулировать приближение самолета 12 к воротам 16 для гарантии, что самолет занимает правильный угол для достижения ворот. Если дисплей 18 показывает неправильный тип 30 самолета, то пилот может прервать приближение до причинения ущерба. Этот двойной контроль гарантирует безопасность пассажиров, самолета и сооружений аэропорта, так как если система пытается маневрировать большим самолетом типа 747, как, если это самолет типа 737, это может вызвать значительные повреждения.
В дополнение к дисплею 18 микропроцессор 26 обрабатывает данные от лазерного дальномера 20 и контролирует его направление через связь 32 с шаговыми двигателями 24, 25. Шаговые двигатели 24, 25 подсоединены к зеркальной системе 21, 22 и перемещают зеркала в соответствии с командами от микропроцессора 26. Таким образом, управляя шаговыми двигателями 24, 25, микропроцессор 26 может изменить угол зеркал 21, 22 зеркальной системы и цель световых импульсов от лазерного дальномера 20.
Зеркала 21, 22 зеркальной системы нацеливают лазерный дальномер посредством отражения световых импульсов над предангарной бетонированной площадкой аэропорта. В предпочтительном варианте исполнения лазерный дальномер 20 неподвижен. Сканирование лазерным дальномером вызывается зеркалами. Одно зеркало 22 управляет горизонтальным углом лазерного дальномера, в то время как другое зеркало 21 управляет вертикальным углом. С помощью активирования работы шаговых двигателей 24, 25, микропроцессор 26 управляет углом зеркал и, таким образом, - направлением светового импульса.
Система 10 управляет горизонтальным зеркалом 22 для достижения непрерывного горизонтального сканирования внутри угла ± 10 градусов с угловыми шагами в приблизительно 0.1 градус, которые эквивалентны 16 микрошагам на шаг для шагового двигателя Escap EDM-453. Один угловой шаг берется для каждого ответа от считывающего устройства, т.е. приблизительно каждые 2.5 мсек. Вертикальное зеркало 21 может управляться для достижения вертикального сканирования между +20 и -30 градусами с угловыми шагами приблизительно 0.1 градуса с одним шагом каждые 2.5 мсек. Вертикальное зеркало 21 используется для сканирования в вертикальном направлении, когда определена высота носа и когда самолет 12 идентифицирован. В течение процесса слежения вертикальное зеркало 21 непрерывно регулируется для поддержки горизонтального сканирующего слежения наклона носа самолета 12.
Система 10 (фиг. 3) разделяет область перед ней по дальности на три части. Наиболее дальняя секция, приблизительно от 50 метров и более, является зоной 50 захвата. В этой зоне 50 система 10 обнаруживает нос самолета и выполняет приблизительную оценку бокового и продольного расположения самолета 12. Внутри зоны 50 захвата находится участок 51 идентификации. На этом участке система 10 сверяет профиль самолета 12 с записанным в память профилем. Система 10 показывает боковое положение самолета 12 в этой области по отношению к заданной линии на дисплее 18. Наконец, ближайшим к лазерному дальномеру 20 является участок 52 отображения или слежения. На участке 52 отображения система 10 показывает боковое и продольное положение самолета 12 по отношению к точной позиции остановки с высокой степенью точности. В конце участка 52 отображения находится точка 53 остановки. В точке 53 остановки самолет будет в правильной позиции у ворот 16.
Дополнительно к оборудованию и программному обеспечению, система 10 поддерживает базу данных, содержащую соответствующие профили для любого типа самолета, который может встретиться. В этой базе данных система хранит профиль для любого типа самолета в виде горизонтального и вертикального профиля, отражающий предполагаемый образец отраженного сигнала для данного типа самолета.
В таблице I система содержит горизонтальный профиль в форме таблицы I, чьи строки 40 индексируются угловым шагом, и чьи колонки 41 индексируются расстоянием от места остановки для данного типа самолета. В дополнение к индексированным строкам таблица содержит строку 42, показывающую вертикальный угол до носа самолета при любом расстоянии от лазерного дальномера, строку 44, показывающую форм-фактор К для профиля, и строку 45, показывающую ряд профильных величин для каждого расстояния профиля. Обозначения 43 внизу таблицы I содержат предполагаемые расстояния для этого типа самолета при различных углах сканирования и расстояниях от точки 53 остановки.
Теоретически 50 угловых шагов и 50 значений расстояния до точки 53 остановки будут требовать таблицу I, содержащую 50 х 50 или 2500 записей. Однако таблица I будет фактически содержать гораздо меньше записей, потому что профиль не будет ожидать ответных сигналов от всех углов при всех расстояниях. Предполагается, что обычная таблица будет фактически содержать от 500 до 1000 значений. Хорошо известные способы программирования обеспечивают способы поддержания частично полной таблицы без использования памяти, необходимой для полной таблицы.
В дополнение к горизонтальному профилю система 10 содержит вертикальный профиль каждого типа самолета. Этот профиль хранится таким же образом, что и горизонтальный профиль, за исключением того, что его строки индексируются угловыми шагами в вертикальном направлении и индекс его колонки содержит меньше расстояний от точки остановки, чем горизонтальный профиль. Вертикальный профиль требует меньше колонок, потому что он используется только для идентификации самолета 12 и для определения высоты его носа, что имеет место в определенном диапазоне расстояний от лазерного дальномера 20 в идентификационной области 51. Следовательно, вертикальный профиль хранит только предполагаемые эхо-сигналы в этом диапазоне без хранения бесполезных данных на ненужных величинах.
Система 10 использует ранее описанное оборудование и базу данных для обнаружения, идентификации и слежения самолета, используя следующие операции:
программное обеспечение (фиг. 4), запускающееся на микропроцессоре, выполняет основную программу, содержащую подпрограмму для калибровочного режима 60, режима 62 захвата и режима 63 швартовки. Микропроцессор сначала выполняет режим 60 калибровки, затем режим 62 захвата и затем режим 64 швартовки. Когда самолет 12 пришвартован, программа заканчивается. Эти режимы раскрываются более детально далее.
Режим калибровки
Для обеспечения точности системы микропроцессор 26 программируется для калибровки самого себя в соответствии с операцией, показанной на фиг. 5 перед захватом самолета 12 и с различными интервалами в течение слежения. Калибровка системы 10 гарантирует, что соотношение между шаговыми двигателями 24, 25 и заданным направлением известно. Возможность лазерного дальномера 20 измерять расстояния также ограничена.
Для калибровки (фиг. 6) система 10 использует квадратную пластину 66 с известным местоположением. Пластина 66 монтируется в 6 метрах от лазерного дальномера 20 на той же высоте, что и лазерный дальномер 20.
Для калибровки система устанавливает (а, β) равными (0,0), заставляя лазер направляться вперед. Вертикальное зеркало 22 затем наклоняется так, что световой луч направляется назад на заднее или дополнительное зеркало 68, которое перенаправляет луч к калибрующей пластине 66 (100). Микропроцессор 26 затем использует шаговые двигатели 24, 25 для движения зеркал 21, 22 до определения ими центра калибровочной пластины 66. Когда центр калибровочной пластины 66 найден, микропроцессор 26 запоминает углы (аср, βcp) в этой точке и сравнивает их с запомненными предполагаемыми углами (102). Система 10 также сравнивает сообщенное расстояние до центра пластины 66 с запомненным ожидаемым значением (102). Если сообщенные значения не совпадают с запомненными значениями, микропроцессор 26 изменяет калибровочные константы, которые определяют предполагаемые значения, пока они не будут соответствовать им (104, 106). Однако, если эти значения отклоняются слишком сильно от запомненных значений в устройстве, то подается сигнал тревоги (108).
Режим захвата
Сначала командно-диспетчерский пункт 14 аэропорта извещает систему 10 об ожидании прибывающего самолета 12 и ожидаемом типе самолета. Этот сигнал переводит программное обеспечение в режим 62 захвата, как показано на фиг. 8. В режиме 62 захвата микропроцессор 26 использует шаговые двигатели 24, 25 для направления лазерного дальномера так, чтобы сканировать зону 50 захвата в горизонтальном направлении для самолета 12. Это горизонтальное сканирование выполняется при вертикальном угле, соответствующему высоте носа предполагаемого типа самолета в средней части зоны 50 захвата.
Для определения точной высоты для сканирования микропроцессор 26 рассчитывает вертикальный угол для светового импульса следующим образом:
βf = arctan[(H-h)/lf],
где H - высота лазерного дальномера 20 над землей; h - высота носа ожидаемого самолета; и lf - расстояние от лазерного дальномера 20 до середины зоны 50 захвата. Это уравнение дает такой вертикальный угол для зеркала 21, который даст возможность найти на нужной высоте в середине зоны 50 захвата ожидаемый самолет 12. Альтернативно, система 10 может запоминать в базе данных значений βf для различных типов самолета при определенном расстоянии. Однако запоминание βf ограничивает гибкость системы 10 потому, что она может захватывать самолет 12 только при одном расстоянии от лазерного дальномера 20.
В зоне 50 захвата, используя этот вертикальный угол, микропроцессор 26 направляет лазерный дальномер для сканирования горизонтально с импульсами приблизительно 0.1 градуса друг от друга. Микропроцессор 26 просматривает горизонтально, изменяя а, горизонтальный угол от центральной линии, начиная от лазерного дальномера 20, между значениями ±аmax, определенными при установке. Обычно ±аmax устанавливается равным 50, что при использовании импульсов в 0.1 градуса эквивалентно 5 градусам и приводит к сканированию по 10 градусов.
Разделение световых импульсов приводит к эху или отражениям от объекта в зоне 50 захвата. Лазерный дальномер 20 захватывает отраженные световые импульсы, рассчитывает расстояние до объекта, исходя из времени между передачей светового импульса и принятием его эха, и посылает вычисленное значение расстояния для каждого эхо-сигнала на микропроцессор 26. Микропроцессор 26 запоминает в раздельных регистрах устройства хранения данных общее количество эхо-сигналов, или попаданий в каждом секторе в 1 градус зоны 50 захвата (70). Так как импульсы генерируются в интервалах по 0.1 градусу, может иметь место в каждом секторе до 10 эхо-сигналов. Микропроцессор 26 запоминает эти попадания в различных переменных sr, где а варьируется от 1 до 10 для того, чтобы отразить каждый одноградусный "срез" из десятиградусной зоны 50 захвата.
Дополнительно к запоминанию количества попаданий на сектор микропроцессор 26 запоминает, снова в устройстве хранения данных, расстояние от лазерного дальномера 20 до объекта для каждого попадания или эхо-сигнала. Запоминание расстояния до каждого отражения требует запоминающего устройства средней величины, достаточной для запоминания до десяти попаданий в каждой одноградусной зоне 50 захвата, или до 100 возможных значений. Так как во многих случаях большинство введенных данных будут пусты, хорошо известные способы программирования могут уменьшить требования к запоминающему устройству ниже имеющихся 100 регистров, всегда выделенных для этих значений.
После того как данные доступны для сканирования, микропроцессор 26 вычисляет общее количество отражений ST при сканировании, суммируя все Sа. Микропроцессор 26 затем рассчитывает SM, наибольшую сумму отражений в трех соседних секторах (72). Другими словами, SM является наибольшей суммой (Sa-1, Sa, Sa-1).
Когда SM и ST вычислены, микропроцессор 26 определяет, являются ли эти эхо-сигналы сигналами от прибывающего самолета 12. Если SM не больше, чем 24, самолет 12 не обнаружен, и микропроцессор 26 возвращается к началу режима 62 захвата. Если наибольшая сумма отражений SM больше, чем 24 (74), то "возможный" самолет 12 обнаружен. Если "возможный" самолет 12 обнаружен, микропроцессор проверяет, больше ли чем 0.5 (76) SM/ST или содержат ли, по меньшей мере, половину всех эхо-сигналов, принятых во время сканирования три соседних сектора с наибольшей суммой.
Если SM/ST больше, чем 0.5, то микропроцессор 26 вычисляет нахождение центра эхо-сигнала (78, 82). Угловое положение центра эхо-сигнала рассчитывается по формуле:
аt = av + (Sа+1 - Sа-1)/(Sа-1 + Sa + Sа+1)
где Sа является Sа, которое дает SM, a av является угловым сектором, который соответствует этому Sа.
Продольное положение центра эхо-сигнала вычисляется по формуле:
lt = (1/n)i-1Σ10lavi,
где lavi являются измеренными значениями, или расстояниями, до объекта для импульсов, которые возвратили эхо-сигнал от сектора av, и где n является общим количеством измеренных значений в этом секторе (78, 82). Так как наибольшее возможное количество измеренных значений - десять, n может быть меньше или равно десяти.
Однако, если SM/ST < 0.5, то эхо-сигналы могут быть вызваны снегом или другим самолетом в ближней области. Если причиной является самолет в ближней области, то самолет, вероятно, располагается благоприятно близко к центральной линии так, что предполагается, что аt будет нулем вместо рассчитанного выше значения, и что lt будет средним расстоянием, заданным тремя соседними секторами (80). Если распределение расстояния слишком велико, микропроцессор 26 не обнаруживает самолет 12 и возвращается к началу режима 62 захвата (81).
После расчета местоположения самолета 12, система 10 переключается на режим 64 швартовки.
Режим швартовки
Режим 64 швартовки, показанный на фиг. 4, включает в себя три стадии: стадию 84 слежения, стадию 86 измерения высоты и стадию 88 идентификации. При стадии 84 слежения система 10 управляет местоположением прибывающего самолета 12 и обеспечивает пилота информацией об осевом положении 31 и расстоянии от точки 53 остановки самолета через дисплей 18. Система 10 начинает слежение за самолетом 12 горизонтальным сканированием.
В течение первого сканирования (фиг. 8) в стадии 84 слежения микропроцессор 26 выдает команду лазерному дальномеру 20 испускать световые импульсы с единичными угловыми шагами а или, предпочтительно, с интервалами в 0.1 градуса между ними:
(аt-аp - 10) и (аt + аp + 10),
где аt определяется в течение режима 62 захвата как угловое положение центра отражения, а аp является наибольшим угловым положением в колонке текущего профиля, которая содержит значения расстояния.
После первого сканирования а отступает назад и вперед по одному шагу на принятое лазерным дальномером значение между:
(as-ap - 10) и (as+ap + 10),
где as является игловой позицией азимута, определенного в течение предыдущего сканирования.
В течение стадии 84 слежения вертикальный угол β устанавливается равным уровню, требуемому для идентификации самолета 12 на его текущем расстоянии от лазерного дальномера 20, которое получается из опорного профиля таблицы I. Текущая колонка профиля является колонкой, представляющей собой положение меньшее, чем ближайшая к 1t.
Микропроцессор 26 использует расстояние от точки 53 остановки для того, чтобы найти вертикальный угол для текущего расстояния самолета по таблице I профилей. Во время первого сканирования расстояние 1t, рассчитанное в режиме 62 захвата, определяет соответствующую колонку таблицы I профилей и, таким образом, угол до самолета 12. Для каждого последующего сканирования микропроцессор 26 использует β в колонке таблицы I профилей, отражающей текущее расстояние от точки 53 остановки (112).
Используя данные сканирования и данные таблицы I о горизонтальном профиле, микропроцессор 26 создает сравнительную таблицу II. Сравнительная таблица II является двумерной таблицей с номером импульса или углового шага, в качестве индекса 91, i в строках. Используя этот индекс, последующая информация, представленная в качестве колонок в таблице, может быть доступна для каждой строки: li 92 - измеренное расстояние до объекта на этом угловом шаге, lki 93 - измеренное значение, уравненное для отклонения, вызванного смещением (равное li минус количество Sm, общее смещение в течение последнего сканирования, минус количество i раз по Sp, среднее смещение в течение каждого шага в последнем сканировании (например, li - (Sm-iSp)), di 94 - расстояние между сгенерированным профилем и опорным профилем (равное rij, значению профиля для соответствующего угла при профильном расстоянии j, минус lki), аi 95 - расстояние между носом самолета и измерительным оборудованием (равное rj50, ВЕЛИЧИНА ОПОРНОГО ПРОФИЛЯ ПРИ НУЛЕ ГРАДУСОВ, МИНУС dj), аe 96 - расчетное расстояние до носа после каждого шага (равное аm, расстояние до носа в конце последнего сканирования минус количество i раз по Sp), аd - разница между расчетным и измеренным расстоянием до носа (равное абсолютному значению аi минус аc), и колонку замечаний 97, которое показывает эхо-сигналы, которые, вероятно, вызываются самолетом.
В течение первого сканирования в стадии 84 слежения система 10 использует колонку горизонтального профиля, представляющую собой местоположение j самолета, меньшее, чем ближайшее к значению lt. Для каждого нового сканирования колонка профиля, чье значение меньше, но ближайшее к значению (аm - sm) является выбранным, где аm - последнее измеренное расстояние до самолета 12 и Sm - смещение самолета в течение последнего сканирования. В дополнение, величины профилей смещаются в стороны посредством as для того, чтобы компенсировать боковое положение самолета (112).
В течение каждого сканирования микропроцессор 26 также генерирует таблицу распределения расстояния (DDT). Эта таблица содержит распределение значений аi, когда они появляются в сравнительной таблице II Таким образом, DDT имеет запись, изображающую количество появлений каждого значения аi в сравнительной таблице II в однометровых приращениях между 10 и 100 метрами.
После каждого сканирования система 10 использует DDT для расчета среднего расстояния аm для корректировки точки 53 остановки. Микропроцессор 26 просматривает данные в DDT для обнаружения двух соседних записей в DDT, для которых сумма этих значений является наибольшей. Микропроцессор 26 затем помечает колонку замечаний 97 в сравнительной таблице II для каждой строки, содержащей запись для аi, соответствующую какой-либо из двух строк DDT, имеющих наибольшую сумму (114).
Система 10 затем определяет боковое отклонение или смещение (116). Микропроцессор 26 сначала устанавливает:
2d= аmax - аmin
где аmax и аmin являются наивысшим и наименьшим значениями а для непрерывной помеченной группы di значений в сравнительной таблице II. В дополнение микропроцессор 26 рассчитывает:
Ψ1 = Σdi
для верхней половины из помеченных di в группе и:
Y2 = Σdi
для нижней половины группы. Используя Y1 и Y2, "а" 116 рассчитывается по формуле:
а = k • (Y1-Y2)/d2
где k дается в опорном профиле. Если "а" превышает данное значение, предпочтительно установленное равным 1, предполагается, что существует боковое отклонение, приблизительно равное "а". Колонка 1i сравнительной таблицы II затем сдвигается на "а" шагов и сравнительная таблица II перевычисляется. Этот процесс продолжается до тех пор, пока "а" станет меньше, чем эмпирически установленное значение, предпочтительно равное 1. Общий сдвиг as колонки 1i рассматривается равным боковому отклонению или смещению (116). Если боковое смещение больше заданного значения, предпочтительно равного 1, профиль согласуется по боку перед следующим сканированием (118, 120).
После того, как боковое смещение проверено, микропроцессор 26 выдает общее боковое согласование профиля, которое соответствует боковой позиции 31 самолета 12 на дисплее 18 (122).
Микропроцессор 26 затем вычисляет расстояние аm до носа самолета:
am = Σ (помеченный ai)/N,
где N является общим количеством помеченных аi. Из аm микропроцессор 26 может вычислить расстояние от самолета 12 до точки остановки 53 с помощью вычитания расстояния от LRF 20 до точки остановки 53 из расстояния до носа самолета (124).
После того, как микропроцессор 26 вычисляет расстояние до точки остановки 53, он вычисляет среднее смещение sm во время последнего сканирования. Смещение во время последнего сканирования вычисляется следующим образом:
Sm = аm-1 - аm,
где am-1 и аm принадлежат последним двум сканированиям. Для первого сканирования в фазе слежения 84 Sm установлено равным 0.
Среднее смещение Sp во время каждого этапа вычисляется следующим образом:
Sp = Sm/P,
где P - общее количество этапов для последнего цикла сканирования.
Микропроцессор 26 будет информировать пилота о расстоянии до точки остановки 53 посредством отображения его на устройстве отображения 18, 29. С помощью отображения расстояния до точки остановки 53 после каждого сканирования пилот получает постоянно обновляемую информацию в реальном времени о том, насколько далеко самолет 12 находится от остановки.
Если самолет 12 находится на участке 52 отображения, и боковое 31 и продольное положение 29 выдаются на дисплей 18 (126, 128). После того, как микропроцессор 26 отображает положение самолета 12, фаза слежения завершается.
После вычисления фазы слежения микропроцессор 26 проверяет, чтобы слежение не было потеряно, проверяя, что общее количество помеченных рядов, разделенное на общее количество измеренных значений, или эхо-сигналов, в последнем сканировании больше, чем 0.5 (83). Другими словами, если более 50% эхо-сигналов не соответствуют опорному профилю, слежение является потерянным. Если слежение потеряно, и самолет 12 находится на расстоянии более, чем 12 метров от места остановки, система 10 возвращается в режим 62 захвата (85). Если слежение потеряно, и самолет 12 находится на расстоянии, менее или равном, чем 12 метров от места остановки, система 10 включает знак остановки для информирования пилота о том, что слежение потеряно (86, 87).
Если слежение не потеряно, то микропроцессор 26 определяет, определена ли высота носа (130). Если высота еще не определена, то микропроцессор 26 входит в фазу 86 измерения высоты. Если высота уже определена, то микропроцессор 26 проверяет, идентифицирован ли самолет (132).
В фазе измерения высоты, изображенной на фиг. 9, микропроцессор 26 определяет высоту носа посредством направления лазерного дальномера 20 для сканирования в вертикальном направлении. Высота носа используется системой для гарантии, что горизонтальное сканирование сделано через вершину носа.
Для проверки высоты носа микропроцессор 26 устанавливает β равным заданному значению βmax, а затем уменьшает его на 0.1 градус за каждый принятый/отраженный импульс до тех пор, пока он не достигнет βmin, другого заданного значения. βmax и βmin устанавливаются во время настройки и обычно равны -20 и 30 градусов соответственно. После того, как β достигает βmin, микропроцессор 26 направляет шаговый двигатель 24, 25 вверх, до тех пор, пока он не достигнет βmax. Это вертикальное сканирование осуществляется с а, установленным равным аs положению азимута предыдущего сканирования.
Используя измеренное расстояние до самолета, микропроцессор 26 выбирает колонку в таблице вертикального 30 профиля, ближайшую к измеренному расстоянию (140). Используя данные сканирования и данные по таблице вертикального профиля, микропроцессор 26 создает сравнительную таблицу II. Сравнительная таблица II (фиг. 4) является двумерной таблицей с количеством импульсов или номером углового шага в качестве индекса 91, i в строках. Используя этот индекс, для каждой строки может быть доступна последующая информация, представленная в виде колонок таблицы, 1i 92, измеренное расстояние до объекта на этом угловом этапе, 1ki 93, измеренное значение, компенсированное для отклонения, вызванного смещением (равное 1i минус количество Sm, общее смещение во время последнего сканирования, минус количество i раз по Sp, среднее смещение во время каждого этапа в последнем сканировании), di 94, расстояние между генерированным профилем и опорным профилем (равное rij, значению профиля для соответствующего угла при профильном расстоянии j, минус 1ki), аi 95, расстояние между носом самолета и измеряющим оборудованием (равное ri50, значению опорного профиля при нуле градусов, минус dj), ae 96, расчетное расстояние до носа после каждого этапа (равное аm, расстоянию до носа в конце последнего сканирования, минус количество i раз Sp), аd, разность между расчетным и измеренным расстоянием до носа (равная абсолютному значению аj минус ae), и колонка замечаний 97, которая указывает эхо-сигналы, вероятно вызванные самолетом 12.
Во время каждого сканирования микропроцессор 26 также генерирует таблицу распределения расстояния (DDT). Эта таблица содержит распределение значений аi, как они имеет запись, представляющую количество появлений каждого значения аi в сравнительной таблице II в однометровых приращениях между 10 и 100 метрами.
После каждого сканирования система 10 использует DDT для расчета среднего расстояния аm для корректировки точки 53 остановки. Микропроцессор 26 просматривает данные в DDT для обнаружения двух соседних записей в DDT, для которых сумма этих значений является наибольшей. Микропроцессор 26 затем помечает колонку замечаний 97 в сравнительной таблице II для каждой строки, содержащей запись для аi, соответствующую какой-либо из двух строк DDT, имеющих наибольшую сумму (114).
После того, как он завершает вычисление среднего расстояния до правильной точки остановки 53, микропроцессор 26 вычисляет среднее смещение sm во время последнего сканирования. Смещение во время последнего сканирования вычисляется следующим образом:
Sm = аm-1 - am,
где am-1 и аm принадлежат к последним двум сканированиям. Для первого сканирования в фазе слежения 84 Sm установлено равным 0. Среднее смещение Sp во время каждого этапа вычисляется следующим образом:
Sp = sm/P,
где P - общее количество этапов для последнего цикла сканирования.
Вычисление реальной высоты носа осуществляется посредством добавления номинальной высоты носа, заданной высоты ожидаемого самолета, когда он пуст, к вертикальному отклонению или отклонению по высоте. Следовательно, для определения высоты носа системы 10 сначала определяет вертикальное или высотное отклонение (144). Вертикальное отклонение вычисляется так:
2d = βmax-βmin,
где βmax и βmin являются наибольшим и наименьшим значениями β для непрерывной помеченной группы значений di в сравнительной таблице II. В дополнение микропроцессор 26 рассчитывает:
Y1 = Σdi
для верхней половины помеченного di в группе и:
Y2 = Σdi
для нижней половины группы. Используя Y1 и Y2, "а" рассчитывается как:
а = k • (Y1-Y2)/d2
где k дается в опорном профиле. Если "а" превышает заданное значение, предпочтительно установленное равным 1, предполагается, что существует вертикальное отклонение, приблизительно равное "а". Колонка 1 затем сдвигается на "а" шагов и сравнительная таблица II отображается повторно, а "а" перерассчитывается. Этот процесс продолжается до тех пор, пока "а" не станет меньше, чем заданное значение, предпочтительно 1. Общий сдвиг βs колонки 1i рассматривается равным отклонению по высоте (144). Значения βj в вертикальной сравнительной таблице II регулируются как βj+Δβj, где вертикальное отклонение Δβj равно:
Δβj = βs•(amβ+as)/(aj+as)
где amβ является действительным значением, когда βs вычислено.
Когда отклонение по высоте определено, микропроцессор 26 проверяет, является ли оно больше заданного значения, предпочтительно равного 1 (146). Если отклонение больше, чем это значение, то микропроцессор 26 согласует профиль вертикально в соответствии со сдвигом (148). Микропроцессор 26 запоминает вертикальную корректировку как отклонение от номинальной высоты носа (150). Фактическая высота самолета - это номинальная высота носа плюс отклонение. Когда завершается стадия 86 измерения высоты, микропроцессор 26 возвращается к стадии 84 слежения.
Если микропроцессор 26 имеет уже определенную высоту носа, он пропускает стадию 86 измерения высоты и определяет, идентифицирован ли самолет 12 (130, 132). Если самолет 12 идентифицирован, то микропроцессор 26 проверяет, достиг ли самолет 12 позиции остановки (134).
Если позиция остановки достигнута, микропроцессор 26 включает знак остановки, и система 10 завершает режим 64 швартовки (136). Если самолет 12 не достиг позиции остановки, то микропроцессор 26 возвращается к стадии слежения (134). Если самолет 12 не идентифицирован, микропроцессор 26 проверяет, находится ли самолет 12 на расстоянии, меньшем или равном 12 метрам от позиции 53 остановки (133). Если самолет 12 находится на расстоянии не дальше 12 метров от позиции 53 остановки, система 10 включает знак остановки для того, чтобы информировать пилота, что идентификация дала сбой (135). После отображения знака остановки система 10 прекращает работу.
Если самолет 12 находится на расстоянии более, чем 12 метров от точки 53 остановки, микропроцессор 26 вводит стадию идентификации, показанную на фиг. 10 (133, 88). В стадии 88 идентификации, микропроцессор 26 создает сравнительную таблицу II для отображения результатов другого вертикального сканирования и содержимого таблицы профиля (152, 154). Другое вертикальное сканирование выполняется в стадии 88 идентификации, так как предыдущее сканирование может обеспечить достаточно данных для определения высоты, но недостаточно для идентификации. Фактически, могут быть необходимы несколько сканирований прежде, чем может быть выполнена достоверная идентификация. После вычисления вертикального смещения 156, проверяющего, что оно не слишком велико 158 и регулирования профиля по вертикали, соответствующего смещению 160, пока смещение понижается ниже данной величины, предпочтительно 1, микропроцессор 26 вычисляет среднее расстояние между отмеченными эхо-сигналами и профилем и среднее расстояние между отмеченными эхо-сигналами и этим средним расстоянием (162).
Это среднее расстояние dm между измеренным и скорректированным профилем и отклонение Т от этого среднего расстояния вычисляются после вертикального и горизонтального сканирований таким образом: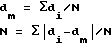
Если T меньше, чем заданное значение, предпочтительно равное 5, для обоих профилей, самолет 12 рассматривается как правильный тип, обеспечивающий получение достаточного количества принятых эхо-сигналов (164). Получено ли достаточное количество эхо-сигналов, проверяется неравенством:
N/size > 0.75
где N - это номер "принятых" эхо-сигналов и "size" - максимальное количество возможных значений. Если самолет 12 - неправильного типа, то микропроцессор включает знак остановки 136 и останавливает режим 64 швартовки. Когда микропроцессор 26 завершает стадию 88 идентификации, он возвращается к стадии 84 слежения.
В то время, как настоящее изобретение раскрывается в связи с его конкретными вариантами исполнения, специалистам должно быть понятно, что может быть сделано множество изменений без отступления от формы и объема настоящего изобретения, которое представлено в нижеследующей формуле изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМЫ ОПОЗНАВАНИЯ И НАВЕДЕНИЯ ПРИ ПАРКОВКЕ ВОЗДУШНЫХ СУДОВ | 2000 |
|
RU2268498C2 |
| ИДЕНТИФИКАЦИЯ ОСЕВОЙ ЛИНИИ В СИСТЕМЕ УПРАВЛЕНИЯ УСТАНОВКОЙ НА МЕСТО СТОЯНКИ, ОБОРУДОВАННОЕ ТЕЛЕСКОПИЧЕСКИМ ТРАПОМ | 2002 |
|
RU2278419C2 |
| Система парковки воздушного судна | 2017 |
|
RU2684885C1 |
| СПОСОБ ИДЕНТИФИКАЦИИ ВОЗДУШНОГО СУДНА ПРИ ПАРКОВКЕ У ВЫХОДА ДЛЯ ПАССАЖИРОВ ИЛИ НА МЕСТЕ СТОЯНКИ | 2013 |
|
RU2625399C2 |
| АЭРОДРОМНЫЙ АВТОМАТИЗИРОВАННЫЙ КОМПЛЕКС МОНИТОРИНГА, УПРАВЛЕНИЯ И ДЕМОНСТРАЦИИ ПОЛЕТОВ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2010 |
|
RU2426074C1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ИДЕНТИФИКАЦИИ ВОЗДУШНОГО СУДНА И УКАЗАНИЯ ТИПА ВОЗДУШНОГО СУДНА ПРИ ПАРКОВКЕ У ВЫХОДА ДЛЯ ПАССАЖИРОВ ИЛИ НА МЕСТЕ СТОЯНКИ | 2013 |
|
RU2624642C2 |
| ПРИБОР ДЛЯ ДНЕВНОГО И НОЧНОГО НАБЛЮДЕНИЯ И ПРИЦЕЛИВАНИЯ | 2006 |
|
RU2310219C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ СКОРОСТИ ДВИЖУЩИХСЯ ОБЪЕКТОВ МЕТОДОМ ПАССИВНОЙ ЛОКАЦИИ | 2014 |
|
RU2575471C2 |
| СПОСОБ И СИСТЕМА НАБЛЮДЕНИЯ ЗА НАЗЕМНЫМ ДВИЖЕНИЕМ ПОДВИЖНЫХ ОБЪЕКТОВ В ПРЕДЕЛАХ УСТАНОВЛЕННОЙ ЗОНЫ АЭРОДРОМА | 2012 |
|
RU2521450C2 |
| СИСТЕМА И СПОСОБ ДЛЯ ИДЕНТИФИКАЦИИ ПРОДУКЦИИ | 2011 |
|
RU2574806C2 |
Изобретение относится к системам для обнаружения, идентификации и слежения за объектами. Более конкретно, оно относится к обнаружению самолета, его идентификации и системам управления швартовкой (постановкой на стоянку) и к способам контроля наземного движения для обнаружения и идентификации объектов на летном поле. Технический результат заключается в повышении точности и безопасности, который достигается за счет того, что система для определения, идентификации и швартовки самолета использует лазерные импульсы для получения профиля объекта на расстоянии. Система сначала сканирует участок перед воротами до тех пор, пока не обнаружит и не идентифицирует объект. Когда идентичность объекта известна, система отслеживает объект. Используя информацию от профиля, система может в реальное время отображать тип самолета, расстояние от точки остановки и боковую позицию самолета. 4 с. и 17 з.п. ф-лы, 10 ил., 2 табл.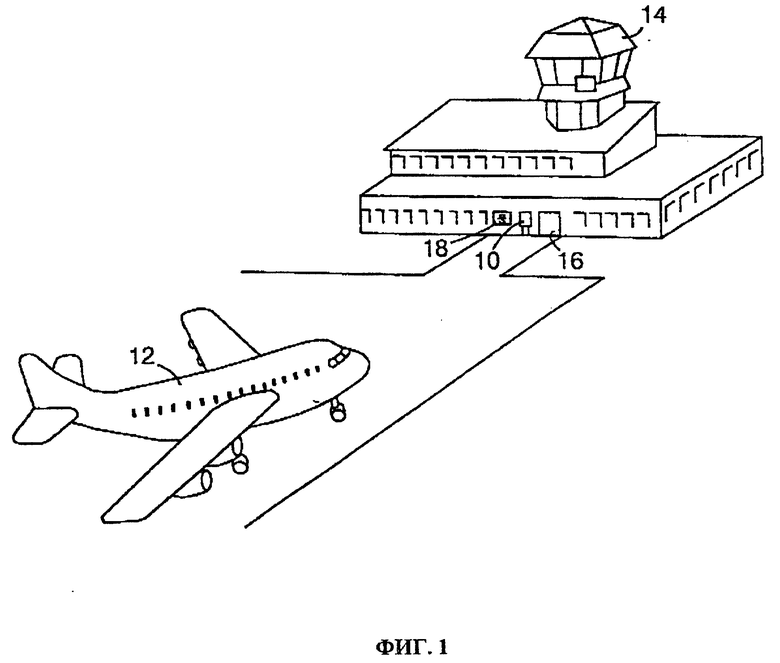
| DE 4301637 A1, 11.08.1994 | |||
| US 4319332 A, 09.03.1982 | |||
| Устройство для определения координат объекта | 1989 |
|
SU1753273A1 |
| US 4995102 A, 19.02.1991 | |||
| В. И. Ульянова ^Ленина)" | 0 |
|
SU188757A1 |
| Домовый номерной фонарь, служащий одновременно для указания названия улицы и номера дома и для освещения прилежащего участка улицы | 1917 |
|
SU93A1 |
