Настоящее изобретение относится к идентификации осевой линии в системе управления установкой на место стоянки, оборудованное телескопическим трапом, в частности, к конфигурированию осевой линии в системе управления установкой на место стоянки, оборудованное телескопическим трапом, которая обеспечивает быструю адекватную отработку конфигурирования осевой линии.
В последние годы можно наблюдать значительное увеличение объема воздушных перевозок, включая увеличение количества взлетов, посадок и иного рода наземных перемещений воздушных судов. Кроме того, также выросло количество наземных вспомогательных транспортных средств для перевозки грузов, пассажиров и для представления услуг по снабжению, а также для технического обслуживания и поддержки воздушных судов в аэропортах. При таком существенном увеличении объема наземных перевозок возникает потребность в более высоком уровне управления и безопасности при установке на место стоянки, оборудованное телескопическим трапом, и идентификации воздушных судов на летном поле. До сих пор системы визуального управления установкой на место стоянки, оборудованное телескопическим трапом, также называемые системами ВУУМСОТТ, используются для достижения безопасного и точного управления во время установки воздушного судна на соответствующее место стоянки воздушных судов. Важно отметить, что информация, которую пилот воздушного судна получает от системы визуального управления установкой на место стоянки, оборудованное телескопическим трапом, должна быть точной, чтобы воздушное судно направлялось на точную позицию остановки с минимальным возможным риском столкновения с каким-либо препятствием на перроне.
На фиг.1 показаны типичные условия эксплуатации таких систем управления установкой на место стоянки, оборудованное телескопическим трапом. Как правило, воздушное судно 10 приближается к зданию 12 терминала, которое находится рядом с летным полем. Для точного управления движением воздушного судна 10 на место 16 стоянки воздушного судна, которое также может быть вынесено на перрон, когда пассажиров подвозит автобус, предусмотрена осевая линия 14. Эта осевая линия 14 содержит окрашенные позиции 18 остановки для воздушных судов разных типов, для которых и предназначено место 16 стоянки воздушных судов, и иногда имеет окрашенный указатель места стоянки. В альтернативном варианте, указатель места стоянки может быть выполнен на знаке, расположенном на стене здания терминала. Вблизи от места стоянки воздушных судов предусмотрена следящая система 22, которая оперативно отображает на дисплее 24 информацию управления для пилота воздушного судна 10.
Если говорить конкретнее, то следящая система 22, показанная на фиг.1, обеспечивает определение местонахождения воздушного судна 10, подтверждение национальной принадлежности воздушного судна и слежение за движением воздушного судна к месту 16 стоянки воздушных судов. Сразу же после приземления воздушного судна 10 на летном поле, диспетчерский пункт 28 информирует следящую систему 22 о том, что к месту 16 стоянки воздушных судов приближается воздушное судно, а также об ожидаемом типе воздушного судна (например, о том, что это «Боинг 747»).
После этого следящая система 22 непрерывно сканирует перрон перед местом 16 стоянки воздушных судов до тех пор, пока не обнаружит воздушное судно 10 и не убедится, что его тип был указан правильно. После этого следящая система 22 сопровождает воздушное судно 10 до его прибытия на позицию 18 остановки, а также до занятия пилотом воздушного судна 10 позиции сбоку относительно осевой линии 14.
Расстояние и упомянутая позиция сбоку отображаются на дисплее 24, позволяя пилоту воздушного судна корректировать положение самолета во время приближения к месту 16 стоянки воздушных судов.
Сразу же после того, как воздушное судно 10 достигло позиции 18 остановки, это тоже отображается на дисплее 24, так что пилот может остановить воздушное судно. Сразу же после остановки воздушного судна, оно оказывается точно выровненным с местом 16 стоянки воздушных судов при минимальной необходимости коррекции оборудования места стоянки относительно воздушного судна наземным персоналом.
В типичном случае осевая линия 14, показанная на фиг.1, является желтой линией, нанесенной краской на перрон, ведущий к месту 16 стоянки воздушных судов. Осевая линия 14 проведена таким образом, что риск столкновения во время маневрирования воздушного судна 10 минимизируется. Поскольку пилот воздушного судна 10 имеет ограниченное поле зрения, он может не увидеть осевую линию 14 во время приближения воздушного судна 10 к позиции 18 остановки. Поэтому он может оказаться в полной зависимости от управления, задаваемого системой визуального управления установкой на место стоянки, оборудованное телескопическим трапом. По этой причине точность, с которой система визуального управления установкой на место стоянки, оборудованное телескопическим трапом, может направлять воздушное судно 10 вдоль осевой линии, оказывает решающее влияние на безопасность.
Когда систему 22, 24 визуального управления установкой на место стоянки, оборудованное телескопическим трапом, устанавливают на месте 16 стоянки воздушных судов параметры, определяющие местоположение осевой линии 14 относительно системы 22, 24 визуального управления установкой на место стоянки, оборудованное телескопическим трапом, нужно корректировать или, иными словами, конфигурировать и/или калибровать для этого конкретного места 16 стоянки воздушных судов.
Местоположение осевой линии 14 определяют по углу и расстоянию до так называемых задающих отметок осевой линии, находящихся на осевой линии 14, относительно положения следящей системы. Эти задающие отметки осевой линии определяются оператором системы визуального управления установкой на место стоянки, оборудованное телескопическим трапом, таким образом, чтобы при этом достигалось правильное моделирование схемы расположения, курса и топологии осевой линии.
Когда осевая линия является прямой, то достаточно определить две задающие отметки осевой линии, т.е. хорошо различимые точки на осевой линии 14. В отличие от этого, когда осевая линия 14 искривлена в горизонтальной или вертикальной плоскости, необходимо определять совокупность задающих отметок осевой линии.
На фиг.2 подробнее показан подход к достижению таких функциональных свойств с помощью калибровочной картины с указанием расстояния посредством разных степеней яркости разных цветов для увеличенного расстояния от места стоянки воздушных судов.
Пример, показанный на фиг.2, относится к той системе визуального управления установкой на место стоянки, оборудованное телескопическим трапом, работа которой основана на наличии лазерного дальномера, генерирующего лазерный луч, который направляется по разным направлениям механизмом сканирования в системе визуального управления установкой на место стоянки, оборудованное телескопическим трапом.
В данном случае, положение каждой точки перед системой визуального управления установкой на место стоянки, оборудованное телескопическим трапом, определяется посредством двух углов α и β, причем первый угол α характеризует вертикальный наклон по направлению к горизонтальной эталонной плоскости, а второй угол β определяется относительно вертикальной плоскости, т.е. той плоскости, которая проходит через следящую систему прямо на перрон. Кроме того, третья величина d характеризует расстояние между следящей системой 22 и рассматриваемой точкой.
Из вышеизложенного должно быть ясно, что система визуального управления установкой на место стоянки, оборудованное телескопическим трапом должна быть конфигурирована либо после новой установки, либо после технического обслуживания, если существует вероятность, что это повлияло на опорное направление сканирующего механизма. Кроме того, поскольку функционирование системы 22, 24 визуального управления установкой на место стоянки, оборудованное телескопическим трапом, является решающим фактором безопасности, важно, чтобы конфигурирование осевой линии осуществлялось с достаточной точностью.
Как показано в нижней части фиг.2, при использовании такого представления каждой сканируемой точки на перроне по отношению к следящей системе 22 системы визуального управления может возникнуть эхо-изображение, которое эквивалентно идентификационному изображению осевой линии или калибровочному изображению в следующем: оно отражает положение каждой сканируемой точки относительно следящей системы 22. Это изображение может быть отображено на экране компьютера, например, с использованием разных цветов.
В частности, разные диапазоны 28, 30, 32 расстояния перед местом 16 стоянки воздушных судов терминала изображаются, например, с помощью разных цветов или оттенков на дисплее, используемом во время конфигурирования системы 22, 24 визуального управления. Следовательно, посредством сканирования области перед местом 16 стоянки воздушных судов создается трехмерное эхо-изображение. В этом эхо-изображении представление третьего измерения - т.е. расстояний до ориентиров или сканируемых точек перед системой визуального управления установкой на место стоянки, оборудованное телескопическим трапом, - осуществляется посредством разных оттенков серого цвета или разных цветов, как поясняется ниже.
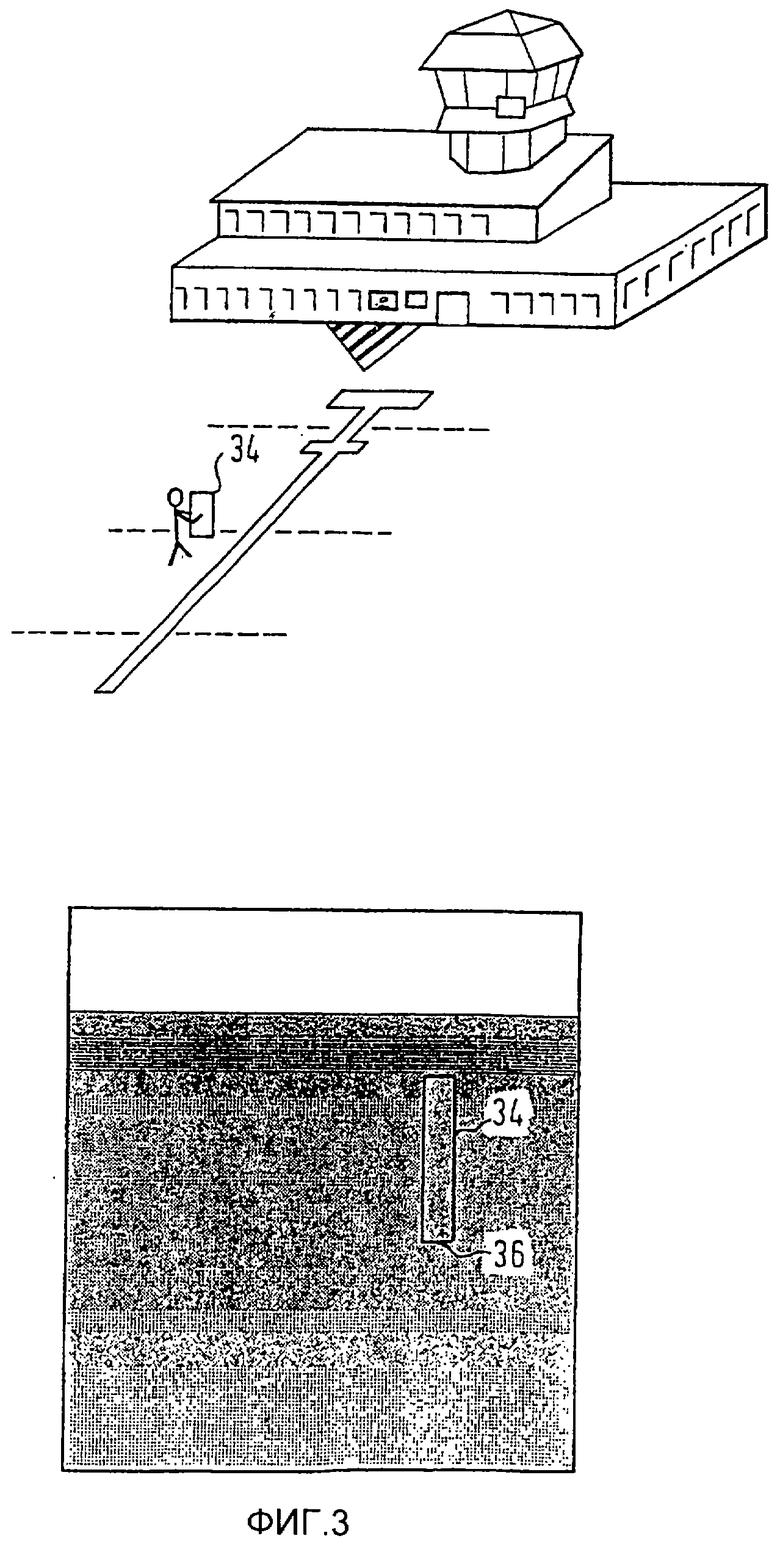
На фиг.3 показано калибровочное изображение, соответствующее фиг.2, когда перед местом стоянки воздушных судов на перроне находится отражающий местный ориентир 34.
Как показано на фиг.3, отражающий ориентир 34, в типичном случае - большую пластину, располагают в разных точках на осевой линии 14 для определения соответствующих задающих отметок осевой линии. Каждое положение отражающего ориентира 34 визуально идентифицируется на идентификационном изображении осевой линии, как показано на фиг.3, а среднюю точку 36, зафиксированную на нижнем краю местного ориентира 34, можно учитывать при определении задающих отметок осевой линии. Измеряемые углы и расстояние до этой определяемой точки осевой линии можно запомнить для последующего обращения к ним.
Однако при осуществлении этого способа, известного в данной области техники, возникает проблема, заключающаяся в том, что определение границы между местным ориентиром, т.е. пластиной, и перроном может оказаться затруднительным, например, когда перрон становится мокрым во время плохих погодных условий. Последствия этого заключаются в том, что осуществление рассмотренного способа может затянуться.
Кроме того, поскольку местный ориентир в типичном случае является большим - порядка 1 м на 1 м, чтобы его было видно на калибровочном изображении, - существует риск, что определенная задающая отметка осевой линии, т.е. средняя точка 36 на нижнем краю местного ориентира, не лежит на реальной границе между местным ориентиром и осевой линией 14, а расположена выше на местном ориентире.
Следовательно, в самом начале конфигурирования в запоминаемые углы и расстояние до системы визуального управления установкой на место стоянки, оборудованное телескопическим трапом, для каждой задающей точки осевой линии вносится ошибка. Очевидно, что она оказывает непосредственное негативное влияние на точность управления, достигаемую посредством системы визуального управления установкой на место стоянки, оборудованное телескопическим трапом.
Еще одно затруднение в связи с известным способом заключается в том, что большие местные ориентиры в условиях ветра требуют наличия специальных конструкций или лишнего штата персонала технического обслуживания для удержания местного ориентира в нужном положении во время конфигурирования системы визуального управления установкой на место стоянки, оборудованное телескопическим трапом.
Ввиду вышеизложенного, задача настоящего изобретения заключается в том, чтобы добиться быстрой адекватной идентификации осевой линии в системе управления установкой на место стоянки, оборудованное телескопическим трапом.
Еще одна задача изобретения заключается в том, чтобы добиться быстрого и точного контроля конфигурирования уже идентифицированной осевой линии.
В соответствии с первым аспектом настоящего изобретения эти задачи решаются с помощью способа идентификации осевой линии в системе визуального управления установкой на место стоянки, оборудованное телескопическим трапом, включающего в себя этапы, на которых сканируют перрон перед воздушным судном или местом стоянки, оборудованным телескопическим трапом, посредством дальномера, регистрируют интенсивность отражения и положения для каждой сканированной точки и идентифицируют осевую линию места стоянки, оборудованного телескопическим трапом, путем использования разностей в интенсивности отражения между осевой линией и поверхностью перрона, окружающей центральную линию.
Следовательно, в соответствии с настоящим изобретением предлагается использовать отражательные свойства осевой линии, например, проведенной краской некоторого цвета на перроне, и окружающей поверхности на перроне, помимо измерения углов и расстояния до разных сканированных точек, в частности, задающих отметок центральной линии, выбранных для определения центральной линии в системе визуального управления установкой на место стоянки, оборудованное телескопическим трапом.
Иными словами, в соответствии с настоящим изобретением создается трехмерное изображение перрона перед системой визуального управления установкой на место стоянки, оборудованное телескопическим трапом, и в этом изображении отражательная способность, или, что точнее, амплитуда эхо-сигналов или, что эквивалентно, количество энергии луча, отраженной от сканированных точек или отражающих ориентиров, представляет собой третье измерение, которое может быть отображено, например, в виде оттенков или цветов. Следовательно, на калибровочном изображении любую сканированную точку на перроне или отражающий ориентир можно идентифицировать даже в случае, если разница в расстоянии между сканируемыми ориентирами и покрытием перрона мала или даже равна нулю, при условии, что разница в отражательных способностях между этой точкой или ориентиром и окружающей поверхностью является значительной.
В соответствии с предпочтительным конкретным вариантом осуществления настоящего изобретения, способ идентификации осевой линии включает в себя дополнительный этап, на котором определяют, по меньшей мере, две задающие отметки осевой линии в соответствии со схемой расположения осевой линии.
В соответствии с этим предпочтительным конкретным вариантом осуществления настоящего изобретения, можно избежать использования больших отражающих ориентиров, например, в виде отражающей пластины, упомянутой выше в связи с фиг.3, когда желтая осевая линия сама хорошо различима на калибровочном изображении. В этом случае задающие отметки осевой линии можно определять путем выбора точек, лежащих на осевой линии. Тогда соответствующие углы в вертикальной и горизонтальной плоскостях можно запоминать для последующего обращения к ним.
В соответствии с другим предпочтительным конкретным вариантом осуществления настоящего изобретения, способ идентификации осевой линии включает в себя этап, на котором сравнивают ранее определенные задающие отметки осевой линии со схемой расположения осевой линии.
В соответствии с этим предпочтительным конкретным вариантом осуществления настоящего изобретения, предлагается генерировать идентификационное изображение осевой линии не только после установки системы управления установкой на место стоянки, оборудованное телескопическим трапом, но и во время последующих периодов ее эксплуатации, например, для проверки конфигурирования уже существующей осевой линии после прохождения предварительно определенного интервала времени эксплуатации, или после технического обслуживания системы визуального управления установкой на место стоянки, оборудованное телескопическим трапом.
Эту проверку проводят просто путем повторного генерирования идентификационного изображения осевой линии, например, на экране дисплея, и последующего наложения задающих отметок осевой линии, генерированной ранее посредством предыдущего конфигурирования осевой линии. То есть, предварительно запомненные задающие точки осевой линии накладывают на вновь генерированное идентификационное изображение осевой линии, и когда они полностью совпадают с вновь генерированной осевой линией, делают вывод, что конфигурация осевой линии является точной.
В противном случае, т.е. когда предварительно запомненные задающие точки осевой линии находятся сбоку от вновь генерированного изображения, или когда расстояние до некоторой точки на изображении, указываемое накладываемой задающей точкой, отличается от запомненного расстояния, становится необходимым новое конфигурирование системы визуального управления установкой на место стоянки, оборудованное телескопическим трапом.
В соответствии с другим предпочтительным конкретным вариантом осуществления настоящего изобретения, предлагается проводить идентификацию осевой линии перед местом стоянки, оборудованном телескопическим трапом, автоматически на базисных расстояниях в пределах интенсивности отражения между осевой линией и поверхностью перрона, окружающей осевую линию.
Этот предпочтительный конкретный вариант осуществления настоящего изобретения подходит, в частности, для случаев, когда осевая линия, находящаяся на перроне, окрашена в очень яркие цвета, например, в желтые цвета, что обычно и бывает. В этом случае, идентификация осевой линии может быть проведена автоматически с использованием хорошо известных способов распознавания изображений применительно к идентификационному изображению осевой линии.
В соответствии с еще одним предпочтительным конкретным вариантом осуществления настоящего изобретения, в случае, когда осевая линия неразличима, предлагается устанавливать, по меньшей мере, два отражающих ориентира с высокой отражательной способностью на осевой линии перед сканированием перрона.
В данном случае, термин «высокая отражательная способность» означает отражательную способность, превышающую отражательную способность поверхности, окружающей осевую линию. Вследствие того, что такие ориентиры с высокой отражательной способностью можно обнаруживать с высокой точностью и более или менее независимо от их размеров, при использовании амплитуды эхо-сигнала эти ориентиры можно сделать значительно меньшими, чем вышеупомянутые ранее использовавшиеся отражающие ориентиры.
Кроме того, поскольку эти малые отражающие ориентиры можно отличить от окружающего перрона благодаря их высокой отражательной способности, их малая поверхность еще и позволяет избежать проблем, упоминавшихся выше в связи с пластинами, использовавшимися при осуществлении известного способа, например, избежать проблем, касающихся точности конфигурирования или обращения с ориентирами в условиях ветра.
В целом, предлагаемый способ обеспечивает более быструю и более точную идентификацию осевых линий, а значит - и ускоренное конфигурирование с повышенной точностью системы визуального управления установкой на место стоянки, оборудованное телескопическим трапом как при наличии, так и при отсутствии местных ориентиров с высокой отражательной способностью. Благодаря тому, что при использовании параметров отражательной способности в качестве дополнительного измерения во время сканирования перрона можно легче определить осевую линию, стало легче определять и автоматически обрабатывать идентификационное изображение осевой линии. По этой причине идентификацию осевой линии и конфигурирование системы визуального управления установкой на место стоянки, оборудованное телескопическим трапом, можно проводить чаще, что также повышает общий уровень безопасности, обеспечиваемый системой визуального управления установкой на место стоянки, оборудованное телескопическим трапом.
В соответствии со вторым аспектом настоящего изобретения, задачи, перечисленные выше, также решаются с помощью системы идентификации осевой линии для системы визуального управления установкой на место стоянки, оборудованное телескопическим трапом, содержащей сканирующий блок, выполненный с возможностью сканирования перрона перед местом стоянки, оборудованным телескопическим трапом, регистрирующий блок, выполненный с возможностью регистрации интенсивности отражения и положения каждой сканированной точки, и обрабатывающий блок, выполненный с возможностью идентификации осевой линии перед местом стоянки, оборудованном телескопическим трапом, путем использования разностей в интенсивности отражения между осевой линией и поверхностью перрона, окружающей осевую линию.
В соответствии с предпочтительным конкретным вариантом осуществления предлагаемой системы идентификации осевой линии, обрабатывающий блок также выполнен с возможностью определения, по меньшей мере, двух задающих отметок осевой линии в соответствии со схемой расположения осевой линии, или сравнения ранее определенных задающих отметок осевой линии со схемой расположения осевой линии.
Следовательно, тех же преимуществ, которые упоминались выше в связи с предлагаемым способом, можно также достичь с помощью предлагаемой системы идентификации осевой линии.
Еще одним, дополнительным преимуществом предлагаемой системы идентификации осевой линии является простота ее реализации с использованием инфраструктур систем визуального управления установкой на стоянки, оборудованные телескопическими трапами, без изменения аппаратного обеспечения этих инфраструктур и лишь путем усовершенствования обрабатывающего блока, например, либо в части его аппаратного обеспечения, либо в части его программного обеспечения, либо и того, и другого.
В соответствии с еще одним предпочтительным конкретным вариантом осуществления настоящего изобретения, предложен компьютерный программный продукт, загружаемый во внутреннее запоминающее устройство обрабатывающего блока в системе управления установкой на место стоянки, оборудованное телескопическим трапом, содержащий части кода программного обеспечения, предназначенные для проведения этапов в соответствии с предлагаемым способом, когда продукт запускают в обрабатывающем блоке в системе управления установкой на место стоянки, оборудованное телескопическим трапом.
Следовательно, настоящее изобретение предложено также для того, чтобы обеспечить осуществление этапов предлагаемого способа в компьютерных или процессорных системах. В заключение отметим, что такое осуществление ведет к разработке компьютерных программных продуктов, предназначенных для использования совместно с компьютерной системой или, что конкретнее, с процессором, входящим в состав, например, системы визуального управления установкой на место стоянки, оборудованное телескопическим трапом.
Программы, определяющие функции настоящего изобретения, могут быть введены в компьютер или процессор во многих формах, включая, но не в ограничительном смысле, информацию, постоянно запомненную на не перезаписываемых носителях информации, например, в постоянных запоминающих устройствах, таких, как ПЗУ, реализованные аппаратно или на компакт-дисках и считываемые процессорами или компьютерными устройствами ввода-вывода, информацию, запомненную на перезаписываемых носителях информации, т.е. флоппи-дисках или накопителях на жестких дисках, или информацию, передаваемую в компьютер или процессор через средства связи, такие как сеть связи и/или телефонные сети, и/или интерсеть, посредством модемов или других устройств сопряжения. Следует понять, что такие носители и средства, когда они несут считываемые процессором команды, воплощающие изобретательский замысел, представляют собой конкретные варианты осуществления настоящего изобретения.
Ниже, со ссылками на прилагаемые чертежи, приводится описание наилучшего способа осуществления изобретения и связанных с ним предпочтительных конкретных вариантов осуществления, при этом:
на фиг.1 показан типичный конкретный вариант осуществления применения системы управления установкой на место стоянки, оборудованное телескопическим трапом;
на фиг.2 показано идентификационное изображение осевой линии, на котором различные степени интенсивности серого цвета или других цветов используются для отображения увеличения расстояний от места стоянки воздушных судов, показанного на фиг.1;
на фиг.3 показано идентификационное изображение осевой линии, соответствующее фиг.2, в случае расположения отражающего ориентира перед местом стоянки воздушных судов на перроне;
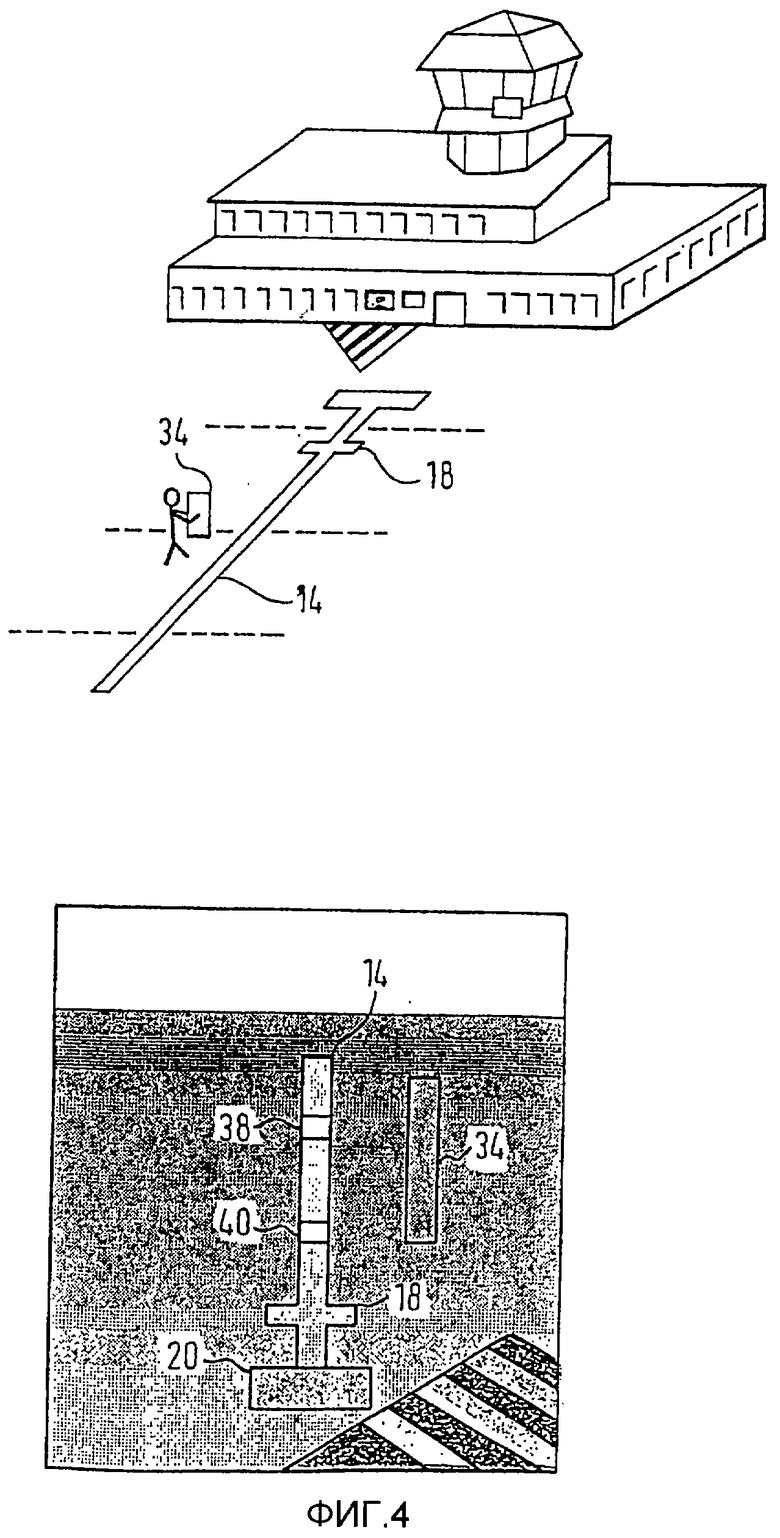
на фиг.4 показано идентификационное изображение осевой центральной линии с отображенной на нем интенсивностью отраженного света в соответствии с настоящим изобретением;
на фиг.5 показан пример определения конфигурации осевой линии и подтверждения конфигурации осевой линии в соответствии с настоящим изобретением;
на фиг.6 показана схема последовательности этапов способа идентификации осевой линии в соответствии с настоящим изобретением;
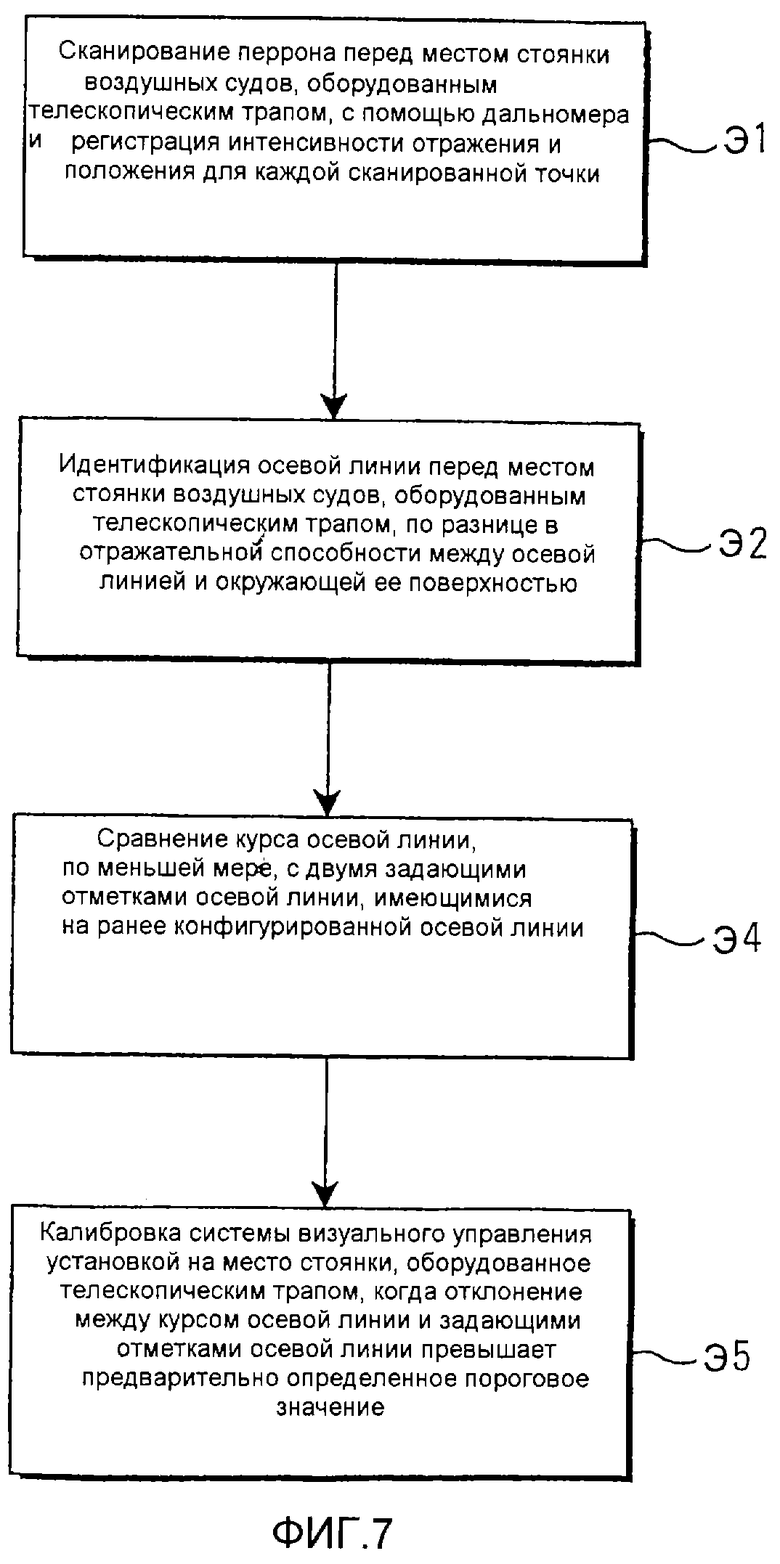
на фиг.7 показана схема последовательности этапов способа проверки конфигурации осевой линии в соответствии с настоящим изобретением;
на фиг.8 показано идентификационное изображение осевой линии с отображенной на нем интенсивностью отраженного света, а также с отображенным на нем размещением отражающих ориентиров в соответствии с настоящим изобретением; и
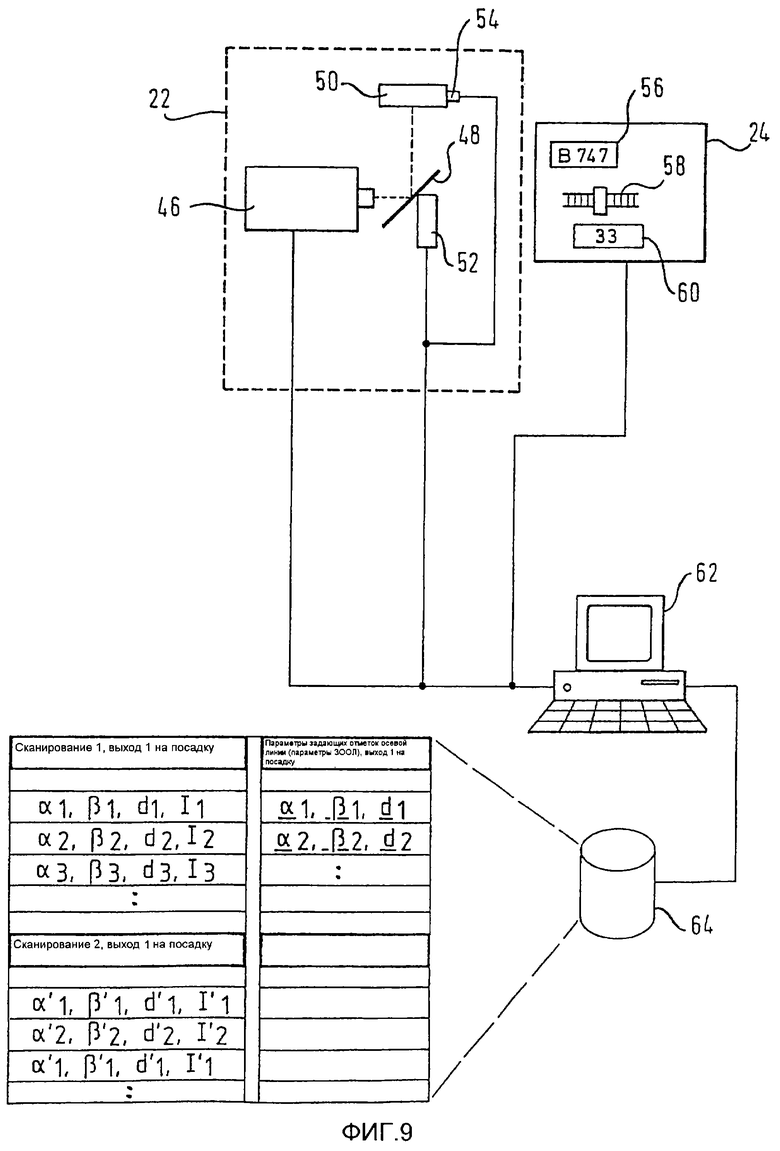
на фиг.9 показана условная схема система конфигурирования осевой линии в соответствии с настоящим изобретением.
Ниже приводится пояснение наилучшего способа осуществления настоящего изобретения и предпочтительных конкретных вариантов его осуществления со ссылками на чертежи. Поскольку будут сделаны ссылки на некоторые части и компоненты, которые уже упоминались выше в связи с фиг.1-3, в дальнейшем будут употребляться те же цифровые обозначения, а их повторное пояснение будет опущено.
На фиг.4 показано идентификационное изображение осевой центральной линии с отображенной на нем интенсивностью отраженного света в соответствии с настоящим изобретением.
Идентификационное изображение осевой центральной линии отображает интенсивность отраженного света как функцию угла сканирования в горизонтальной и вертикальной плоскости. Чем выше интенсивность, тем светлее оттенок серого цвета. Хотя на самом изображении нет информации о расстоянии, расстояние до некоторой конкретной точки можно найти, например, наведя курсор на эту точку на дисплее компьютера и щелкнув на ней мышью. Тогда расстояние до этой точки будет показано в отдельном диалоговом окне на экране дисплея компьютера.
Как показано на фиг.4, в соответствии с настоящим изобретением предложено не только учитывать углы в вертикальной и горизонтальной плоскостях наряду с расстоянием до сканированной точки при генерировании идентификационного изображения осевой линии, но и измерять - в качестве дополнительно измеряемого размера - амплитуду эхо-сигналов, отраженных к системе 22, 24 визуального управления установкой на место стоянки, оборудованное телескопическим трапом.
Результат применения этого подхода показан в нижней части фиг.4. Можно заметить, что на идентификационном изображении осевой линии представлен не только отражающий ориентир 34, но и осевая линия 14, позиция 18 остановки, указатель 20 места стоянки, а также запретная зона перед местом 16 стоянки воздушных судов.
Изучая нижнюю часть фиг.4, можно заметить, что ввиду использования информации об амплитуде больше не нужно использовать большой отражающий ориентир 34, упоминавшийся выше в связи с известным техническим решением, для конфигурирования системы визуального управления установкой на место стоянки, оборудованное телескопическим трапом.
В отличие от того решения, можно обратиться непосредственно к отображаемой информации, имеющей однозначное соответствие с находящимися на перроне осевой линией, позицией остановки, идентификатором места стоянки, запретной зоной и т.д., что повышает точность измерения.
Один возможный подход заключается в том, чтобы пометить, по меньшей мере, две задающие отметки 38, 40 осевой линии сразу же после отображения идентификационного изображения осевой линии на экране, например, с помощью интерактивного устройства ввода-вывода, в частности, мыши, сенсорного экрана, светового пера, и т.д.
После этого можно запомнить положение этих задающих отметок 38, 40 осевой линии, а потом обращаться к ним при повторном генерировании идентификационного изображения осевой линии, осуществляемом позже в целях проверки. После этого можно считывать задающие отметки 38, 40 осевой линии и накладывать эти отметки на повторно генерируемое идентификационное изображение осевой линии.
Как показано в левой части фиг.5, когда положение предварительно запомненных задающих отметок 38, 40 осевой линии совпадает с осевой линией 14, т.е. когда изображение осевой линии проходит через предварительно запомненные задающие отметки 38, 40 осевой линии, а измеренное расстояние на этих отметках совпадает с предварительно запомненными значениями, ясно, что система визуального управления установкой на место стоянки, оборудованное телескопическим трапом, по-прежнему является конфигурированной или калиброванной.
В противном случае, как показано в правой части фиг.5, когда возникает несовпадение предварительно запомненных задающих отметок 38, 40 осевой линии с осевой линией 14, ясно, что система визуального управления установкой на место стоянки, оборудованное телескопическим трапом, больше не является конфигурированной или калиброванной, например, из-за проведения технического обслуживания или осуществленного каким-либо иным образом внесения изменения содержащихся в ней компонентов аппаратного и/или программного обеспечения.
Примеры, приведенные со ссылками на фиг.4 и 5, сведены на фиг.6 в схему последовательности этапов способа идентификации осевой линии с соответствии с настоящим изобретением. В частности, на этой схеме последовательности этапов показаны первые этапы, проводимые с целью быстрой и адекватной настройки системы визуального управления установкой на место стоянки, оборудованное телескопическим трапом.
Как показано на фиг.6, сначала проводят этап Э1, на котором сканируют перрон перед местом 16 стоянки воздушных судов, оборудованным телескопическим трапом, с помощью дальномера 22 и регистрируют интенсивность отражения и положение для каждой сканированной точки. После этого проводят этап Э2, на котором идентифицируют осевую линию 14 перед местом стоянки воздушных судов, оборудованным телескопическим трапом, по разнице в отражательной способности между осевой линией 14 и окружающей ее поверхностью на перроне. После этого проводят (по выбору) этап Э3, на котором конфигурируют осевую линию посредством определения, по меньшей мере, двух задающих отметок 38, 40 осевой линии, принадлежащих осевой линии 14.
На фиг.7 показана схема последовательности этапов способа проверки конфигурации осевой линии в соответствии с настоящим изобретением, проиллюстрированной на фиг.4 и 5. Поскольку этапы Э1 и Э2 идентичны тем, которые проводились при первоначальном конфигурировании системы визуального управления установкой на место стоянки, оборудованное телескопическим трапом, то повторное пояснение этих этапов приведено не будет.
Как показано на фиг.7, во время проверки конфигурации проводят дополнительный этап Э4, на котором сравнивают курс осевой линии, отображенное на экране, по меньшей мере, с двумя задающими отметками 38, 40 осевой линии, имеющимися на ранее конфигурированной осевой линии 14, т.е. осуществляют рассмотрение изображений задающих отметок 38, 40 осевой линии, наложенных на осевую линию 14, как показано на фиг.5.
По выбору, когда отклонение между схемой расположения осевой линии или ее курсом и задающими отметками осевой линии превышает предварительно определенное пороговое значение, на этапе Э5 осуществляют повторное конфигурирование или калибровку системы визуального управления установкой на место стоянки, оборудованное телескопическим трапом, чтобы возвратить систему визуального управления установкой на место стоянки, оборудованное телескопическим трапом, в состояние, пригодное для надлежащей работы.
Процедуру, описанную выше в связи с фиг.7, можно проводить и вручную, например после получения сигнала аварийного состояния от системы, или автоматически в соответствии с вышеуказанными критериями.
Кроме того, следует отметить, что упомянутое предварительно определенное пороговое значение является произвольно выбираемым параметром для конфигурирования центральной линии в соответствии с настоящим изобретением. Помимо этого, чтобы осуществить новое конфигурирование системы визуального управления установкой на место стоянки, оборудованное телескопическим трапом, можно просто определить новые задающие отметки осевой линии в соответствии с новым идентификационным изображением осевой линии для последующей работы системы визуального управления установкой на место стоянки, оборудованное телескопическим трапом. Еще один - второй - способ заключается в определении преобразования, отображающего положение ранее определенных задающих отметок осевой линии на вновь определенные задающие отметки осевой линии для последующего вычисления преобразования координат во время работы системы визуального управления установкой на место стоянки, оборудованное телескопическим трапом.
На фиг.8 показана другая модификация настоящего изобретения, в соответствии с которой идентификационное изображение осевой линии генерируется с помощью отражающих ориентиров, размещаемых на осевой линии.
Как показано на фиг.8, в соответствии с предпочтительным конкретным вариантом осуществления настоящего изобретения, предлагается размещать отражающие ориентиры 42, 44 с повышенной отражательной способностью на осевой линии 14 перед сканированием перрона. Типичные размеры таких отражающих ориентиров могут доходить до 0,5 м в ширину и до 0,5 м в высоту. Этот подход облегчает конфигурирование осевой линии в неблагоприятных условиях измерения, например, в случаях истертой осевой линии или осевой линии, покрытой следами резины шин колес воздушных судов. В любом случае, наличие отражающих ориентиров с повышенной отражательной способностью обеспечивает проведение правильного и надежного определения задающих отметок осевой линии, которые должны находиться на осевой линии 14.
На фиг.9 показана условная схема системы конфигурирования осевой линии в соответствии с настоящим изобретением.
Как показано на фиг.9, система конфигурирования осевой линии подразделяется на систему визуального управления установкой на место стоянки, оборудованное телескопическим трапом, в состав которой входят следящая система 22 и видеодисплей 24, и на обрабатывающий и управляющий блок 62. Следящая система 22 содержит лазерный дальномер 46, генерирующий, например, лазерный луч, отражаемый первым зеркалом 48 и вторым зеркалом 50, для последующего сканирования перрона. Каждое из первого и второго зеркал 48 и 50 приводится в движение первым и вторым шаговыми электродвигателями 52 и 54 соответственно.
Кроме того, система визуального управления установкой на место стоянки, оборудованное телескопическим трапом, содержит блок 24 дисплея, который отображает тип 56 воздушного судна, боковое отклонение 58 и расстояние 60 до позиции остановки.
Как показано на фиг.9, и следящая система 22, и блок 24 дисплея системы визуального управления установкой на место стоянки, оборудованное телескопическим трапом, работают под управлением компьютера или специализированного процессора 62, имеющего доступ к носителю 64 информации, предусмотренному внутри или снаружи блока 62.
Как показано на фиг.9, обрабатывающий и управляющий блок 62 выполнен с возможностью управления следящим блоком 22 таким образом, что в процессе первого сканирования перрона генерируются данные 1 сканирования, содержащие углы αi, βi и соответствующие им расстояния di наряду с соответствующими им измеренными значениями Ii интенсивности. Кроме того, носитель информации также хранит αi, βi и di задающих отметок. Эти данные генерируются после отображения идентифицирующего изображения осевой линии на экране дисплея обрабатывающего и управляющего блока 62, например, с помощью устройства ввода-вывода, такого, как мышь, сенсорный экран, сенсорный карандаш, и т.д., приводимого в действие оператором системы визуального управления установкой на место стоянки, оборудованное телескопическим трапом.
Как тоже показано на фиг.9, проводимая после первого сканирования перрона и определения соответствующих задающих отметок осевой линии проверка такого конфигурирования осевой линии требует второго или последующего сканирования перрона для генерирования нового набора данных α'i, β'i, d'i, I'i, соответствующих идентификационному изображению осевой линии.
Однако после второго сканирования перрона повторное определение задающих отметок линии сканирования не проводится, а данные, касающиеся задающих отметок осевой линии и генерированные во время первого сканирования, используются, например, для получения наложенного отображения на экране управляющего и обрабатывающего блока 62 для оценки совпадения задающих отметок осевой линии или несовпадения задающих отметок осевой линии, как описано в связи с фиг.5.
Хотя выше приведено пояснение настоящего изобретения в связи с тем, что в настоящее время считается наилучшим способом и предпочтительными конкретными вариантами его осуществления, для специалистов в данной области техники должно быть ясно, что можно рассмотреть уже имеющиеся многочисленные модификации и изменения.
Например, хотя выше упоминались две задающие отметки осевой линии, должно быть ясно, что можно использовать произвольное количество задающих отметок осевой линии для конфигурирования и/или калибровки осевой линии, подходящее для определения курса осевой линии в трех измерениях.
Кроме того, настоящее изобретение можно реализовать либо аппаратно, либо программно, либо в виде комбинации аппаратных и программных средств, но в любом случае - на основе промышленно поставляемых компонентов общего назначения или специализированного аппаратного обеспечения.
Помимо этого, хотя сделаны ссылки на лазерный дальномер, должно быть ясно, что настоящее изобретение также охватывает любой подходящий способ сканирования, хорошо известный в данной области техники, например, микроволновое, ультразвуковое сканирование, инфракрасное сканирование и т.д.
В дополнение к этому отметим, что, хотя выше было приведено пояснение настоящего изобретения применительно к одной осевой линии, должно быть ясно, что те же методы и признаки, которые охарактеризованы выше, можно с равным успехом применить к конфигурированию и/или калибровке совокупности осевых линий, расположенных перед местом стоянки воздушных судов.




Группа изобретений относится к технике управления воздушным транспортом, находящимся на земле. Предполагается наличие места стоянки, оборудованного телескопическим трапом. В процессе осуществления идентификации осевой линии в системе управления установкой на место стоянки сканируют перрон перед местом стоянки с помощью лазерного дальномера и регистрируют интенсивность отражения и положение для каждой сканированной точки посредством регистрирующего блока. После этого в обрабатывающем блоке идентифицируют осевую линию перед местом стоянки с использованием разностей в интенсивности отражения между осевой линией и поверхностью перрона, окружающей осевую линию. Затем определяют, по меньшей мере, две задающие отметки осевой линии в соответствии со схемой расположения осевой линии. Группа изобретений обеспечивает точную и быструю идентификацию осевой линии в системе управления установкой на место стоянки, оборудованное телескопическим трапом, и последующую проверку конфигурирования осевой линии. 2 н. и 12 з.п. ф-лы, 9 ил.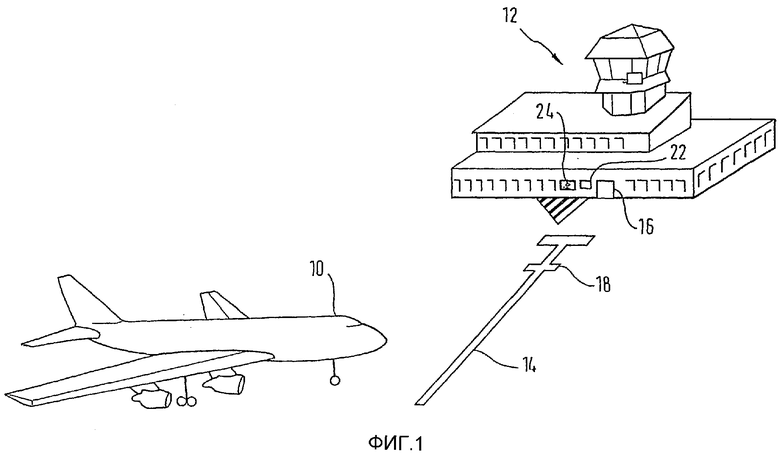
| ИДЕНТИФИКАЦИЯ САМОЛЕТА И СИСТЕМЫ УПРАВЛЕНИЯ ШВАРТОВКОЙ | 1994 |
|
RU2155384C2 |
| СИСТЕМА ДЛЯ УСТАНОВКИ САМОЛЕТА НА МЕСТО СТОЯНКИ И ИНФОРМАЦИОННОГО ОБЕСПЕЧЕНИЯ НАЗЕМНЫХ СЛУЖБ | 1990 |
|
RU2093899C1 |
| Оптическое устройство для наведения самолетов на место стоянки | 1972 |
|
SU524507A3 |
| Устройство для определения положения объекта | 1986 |
|
SU1384952A1 |

