Эта заявка является частичным продолжением в настоящее время рассматриваемой заявки на патент США № 09/429609, зарегистрированной 29 октября 1999 г., которая является частичным продолжением заявки на патент США № 08/817368, зарегистрированной 17 июля 1997 г., теперь - патента США № 6023665, который является национальным этапом США международной заявки РСТ № PCT/SE94/00968, зарегистрированной 14 октября 1994 г. и опубликованной 25 апреля 1996 г. под номером WO 96/12265 A1. Описания заявок на патенты, таким образом, включены в данное описание в качестве ссылочного материала во всей их полноте.
Это изобретение относится к системам для определения местонахождения, опознавания и сопровождения объектов. Более конкретно, оно относится к системам определения местоположения, опознавания и наведения при парковке воздушных судов и к способам управления наземным движением для определения местонахождения и опознавания объектов на аэродроме и для безопасной и эффективной парковки воздушного судна на таком аэродроме.
В последние годы значительно увеличился объем пассажирских, грузовых и других воздушных перевозок, включающих взлеты, посадки и другие виды наземного движения воздушных судов. Кроме того, отмечено увеличение количества наземных транспортных средств обеспечения, которые требуются для разгрузки грузов, обслуживания кухни воздушного судна и текущего обслуживания и обеспечения всего самолета. При таком значительном увеличении наземного движения возникла необходимость в усилении мер контроля и безопасности при направлении воздушных судов на парковку и опознавания их на аэродроме.
Типичными системами известного уровня техники, которые были предложены для обнаружения наличия воздушного судна и другого движения на аэродроме, являются системы, описанные в патенте США № 4995102, европейском патенте № 188757 и опубликованных заявках РСТ WO 93/13104 и WO 93/15416.
Однако ни одна из этих систем не была признана удовлетворительной с точки зрения обнаружения наличия воздушного судна на аэродроме, особенно в неблагоприятных климатических условиях, вызывающих ухудшение видимости, которые возникают при тумане, выпадении снега или дождя со снегом. Кроме того, ни одна из систем, раскрытых в ссылках известного уровня техники, не способна опознавать и проверять конкретный тип приближающегося воздушного судна. Кроме того, ни одна из известных систем не обеспечивает получение адекватной техники сопровождения и парковки воздушного судна в назначенном пункте остановки, таком как погрузочный выход аэропорта. Также ни одна из известных систем не обеспечивает получение технического решения, которое позволяет выполнять адекватную калибровку входящей в них аппаратуры.
Система, описанная в указанной выше первоначальной заявке, направлена на преодоление указанных выше проблем посредством сопоставления контуров. Световые импульсы от лазерного дальномера (LRF) проецируются в угловых координатах на самолет. Световые импульсы отражаются от самолета и по ним определяется конфигурация самолета или части самолета, например носовой части. Определенная конфигурация сравнивается с контуром, соответствующим конфигурации известной модели самолета, для определения, соответствует ли определенная конфигурация конфигурации известной модели.
Однако эта система имеет недостаток. Часто две или более моделей самолетов имеют настолько похожие контуры носовой части, что одну модель часто ошибочно принимают за другую. В частности, при неблагоприятных погодных условиях многие отраженные импульсы теряются и, таким образом, распознавание контура становится менее надежным. Поскольку модели подобны, но не идентичны в конфигурации фюзеляжа, правильное положение при парковке одной модели может привести к столкновению двигателя другой с физическим препятствием.
Таким образом, сохранялась проблема создания систем, которые достаточно безопасны и надежны в широком диапазоне погодных условий для обеспечения обнаружения объектов, таких как воздушное судно, и других участников наземного движения на аэродроме.
В дополнение к этому, в течение долгого времени была насущной необходимость в системах, которые не только способны обнаруживать такие объекты, как воздушное судно, но которые также обеспечивают эффективное опознавание обнаруженного объекта и проверку опознавания такого объекта, например обнаруженного воздушного судна, с необходимой степенью достоверности независимо от превалирующих погодных условий и интенсивности наземного движения.
Кроме того, долгое время оставалась неудовлетворенной потребность в системах, которые способны точно и эффективно сопровождать и наводить объекты, такие как прибывающее воздушное судно, к пригодным пунктам остановки, таким как погрузочный выход аэропорта. Кроме того, долговременной, требующей разрешения проблемой оставалось получение точной и эффективной техники калибровки для таких систем.
Из указанного выше можно легко понять, что в данной области техники существует необходимость в более точном опознавании воздушного судна.
Таким образом, главной задачей настоящего изобретения является установление различий среди множества моделей воздушных судов с идентичными или почти идентичными конфигурациями носовой части.
Другой задачей настоящего изобретения является усовершенствование обнаружения воздушного судна таким образом, чтобы избежать происшествий при парковке воздушного судна.
Для решения указанных выше и других задач настоящее изобретение предусматривает опознавание воздушного судна в процессе выполнения двух операций. Сначала сопоставление контуров выполняется способом, известным из указанной выше первоначальной заявки. Затем выполняется сопоставление по меньшей мере одного признака воздушного судна. При сопоставлении признака воздушного судна в качестве основы для распознавания среди самолетов избирают компонент воздушного судна, такой как двигатель. Смещение этого компонента относительно другого компонента, местоположение которого легко обнаруживается, такого как носовая часть, определяется следующим образом. Определяют внутренний объем, в котором ожидается расположение двигателя, и также определяют внешний объем, окружающий внутренний объем. Лазерный дальномер наводят на внутренний и внешний объемы для получения отраженных импульсов из этих объемов. Получают отношение количества отраженных импульсов из внутреннего объема и количества отраженных импульсов из обоих объемов. Если этот показатель превышает заданное пороговое значение, считается, что двигатель находится во внутреннем объеме и воздушное судно считается опознанным. Если опознавание воздушного судна еще допускает двоякое толкование, может обнаруживаться другой признак самолета, такой как хвостовая часть.
Признаками воздушного судна, избранными для второй фазы опознавания, являются физические различия, обнаруживаемые лазерным дальномером. Примером такого признака является местоположение по длине и по ширине двигателя относительно носовой части воздушного судна. Для определения, что воздушное судно опознано, рисунок отраженных импульсов должен не только отражать фюзеляж правильной формы. Он должен также отражать наличие двигателя в положении относительно носовой части, в котором ожидается наличие двигателя воздушного судна. Другими примерами признаков, которые могут использоваться, являются положение основной опоры, положение крыльев и положение хвостовой части.
Сопоставление, предпочтительно, выполняют только относительно признака, характерного для ожидаемого типа воздушного судна. Выполнение сопоставления относительно признаков всех других возможных типов будет отнимать слишком много времени. Такое сопоставление может также выполняться относительно каждого типа воздушного судна, которое может приземляться в конкретном аэропорту.
Для каждого выхода аэропорта определено положение остановки для каждого типа воздушного судна, которое планируется парковать у этого выхода. При приближении к выходу любого другого типа может возникать угроза безопасности. Положение остановки определяют так, что существует достаточный запас безопасности между выходом и воздушным судном для исключения столкновения. Положение остановки для каждого типа воздушного судна часто определяют как положение передней стойки шасси, когда дверь находится в надлежащем положении относительно выхода. В системе существует база данных, в которой хранятся данные о расстоянии от носа до передней стойки шасси для каждого типа воздушного судна. Система парковки наводит воздушное судно относительно положения его носовой части и останавливает самолет так, что его нос находится в положении, в котором у правильно определенного типа самолета передняя стойка шасси находится в правильном положении остановки. Если стыкуется самолет неправильно определенного типа и если его крылья и двигатели расположены ближе к носу, чем у самолета надлежащего типа, существует риск столкновения с выходом.
В ходе фазы определения признаков воздушного судна могут быть проверены все признаки самолета, заданные для ожидаемого типа самолета. Если воздушное судно имеет контур, который может использоваться для его отличия от любого другого типа, что является редким случаем, контур будет единственным признаком воздушного судна. В другом случае проверяют другой признак, такой как положение двигателя, и если опознавание еще допускает двоякое толкование, проверяют еще один признак, такой как положение хвостовой части.
Лазерный дальномер наводят для получения отраженных импульсов из внутреннего и внешнего объемов. Если отношение количества отраженных импульсов из внутреннего объема и количества отраженных импульсов из обоих объемов больше порогового значения, воздушное судно опознается как имеющее двигатель в надлежащем положении, и характерный признак, таким образом, соответствует ожидаемому. Однако отношение количеств отраженных импульсов является лишь примером теста, используемого для оценки наличия двигателя в надлежащем положении или для определения, поступают ли отраженные импульсы от какого-то другого источника, например крыла. В случаях, когда это является единственным признаком, воздушное судно считается опознанным. В другом случае должен проверяться другой заданный признак (например, высота носа самолета, или оценивается другой признак самолета).
Если необходимо, для опознавания одного конкретного типа самолета может использоваться несколько характеристик, таких как хвостовая часть, стойки шасси и т.д. Затем определяют внутренний и внешний объемы для каждой геометрической характеристики, используемой для опознавания. Точная протяженность объемов зависит от типа конкретного воздушного судна и, таким образом, она является пороговым значением.
Другим идентификационным признаком является высота носа. Высоту носа измеряют так, чтобы обеспечивать горизонтальное сканирование по оконечности носа. Измеренная высота носа также сравнивается с высотой ожидаемого воздушного судна. Если два значения отличаются более чем на 0,5 м, воздушное судно рассматривается как самолет ненадлежащего типа и парковка прекращается. Значение, составляющее 0,5 м, задано тем фактом, что высота земной поверхности часто изменяется на линии движения воздушного судна, что затрудняет измерение с более высокой точностью.
Изобретение приспособлено для использования "интеллектуальных" алгоритмов, которые сводят к минимуму потребность в обработке сигналов и одновременно сводят к минимуму влияние неблагоприятной погоды и слабой отражающей способности поверхности самолета. Преимуществом является то, что могут использоваться недорогие микрокомпьютеры и/или ресурс компьютера освобождается для выполнения других задач и парковка возможна почти при всех погодных условиях.
Одним важным в этом отношении алгоритмом является алгоритм обработки эталонных контуров. Информация о контурах хранится как комплект контуров. Каждый контур в комплекте отражает ожидаемый рисунок отраженных импульсов для воздушного судна, находящегося на определенном расстоянии от системы. Положение воздушного судна вычисляется посредством вычисления расстояния между полученным рисунком отраженных импульсов и ближайшим эталонным контуром. Интервал расстояний между контурами в комплекте подобран таким коротким, что последующее вычисление может выполняться с использованием приближений и все же будет сохранять необходимую точность. Вместо использования масштабирования с рядом умножений, что является трудной операцией, может использоваться простое сложение и вычитание.
Другим важным алгоритмом является алгоритм для определения бокового смещения воздушного судна от надлежащей линии движения. Алгоритм предусматривает большей частью операции сложения и вычитания и лишь очень немного операций умножения и деления. Вычисление основано на районах между эталонным контуром и рисунком отраженных импульсов. Поскольку эти районы не так сильно подвержены влиянию изменений положения или отсутствия отдельных отраженных импульсов, алгоритм становится очень нечувствительным к помехам вследствие неблагоприятной погоды.
Процедура калибровки допускает проверку калибровки по объекту, находящемуся сбоку от системы. Преимущество состоит в том, что такая проверка калибровки возможна также, когда перед системой нет доступного неподвижного объекта. В большинстве случаев перед системой нет объектов, которые можно использовать. Очень важно регулярно выполнять проверку калибровки. С системой может что-то происходить, например, так, что направление наведения системы изменяется. Это может происходить вследствие оптической или механической погрешности в системе или вследствие рассогласования, вызванного внешней силой, например от проехавшего автомобильного тягача. Если это происходит, система может приводить к столкновению воздушного судна с объектами, расположенными сбоку от его надлежащей линии движения.
Другим аспектом настоящего изобретения является то, что оно может легко адаптироваться для учета угла рыскания самолета. Угол рыскания полезно знать по двум причинам. Во-первых, знание угла рыскания облегчает точную парковку воздушного судна. Во-вторых, когда угол рыскания определен, контур поворачивается соответственно для более точного сопоставления.
В процессе проверки определяется, находятся ли в определенном положении, например, относительно носа, определенные геометрические характеристики, такие как двигатель. Если воздушное судно направлено под углом к системе наведения при парковке (DGS), что происходит часто, этот угол должен быть известен для того, чтобы знать, где искать признаки. Процедура выполняется следующим образом:
1. Преобразование полярных координат (угол, расстояние) отраженных импульсов в прямоугольные координаты (х, у).
2. Вычисление угла рыскания.
3. Поворот контура отраженных импульсов для соответствия углу рыскания, вычисленному для воздушного судна.
4. Определение наличия идентификационных характеристик.
Угол рыскания в типичном варианте вычисляется способом, который включает определение углов регрессии по обе стороны от носа воздушного судна. В более широком смысле используется геометрия части воздушного судна, расположенной сразу за носом. До сих пор это считалось невозможным.
Еще один аспект изобретения относится к центральным линиям, нанесенным в районе парковки. Изогнутые парковочные центральные линии наносят в качестве правильной линии движения, которой должно следовать переднее шасси, но которая не является линией движения для носа. Если система наведения при парковке не измеряет непосредственно фактическое положение переднего шасси, знание угла рыскания необходимо для его вычисления на основе данных измерения, таких как положение носа. Затем может вычисляться положение переднего шасси относительно изогнутой центральной линии.
Для этого предусмотрены система и способ для определения, следует ли транспортное средство по центральной линии, причем транспортное средство имеет нос и шасси, а система содержит запоминающее устройство для хранения (I) координат, представляющих траекторию центральной линии, и (II) расстояния между носом и шасси, устройство обнаружения для определения (I) положения носа и (II) угла рыскания транспортного средства и вычисляющее устройство для вычисления (I) положения шасси по положению носа, углу рыскания, определенного устройством обнаружения, и расстоянию, хранящемуся в запоминающем устройстве, и (II) смещения шасси от центральной линии по координатам, хранящимся в запоминающем устройстве, и положению шасси.
Признаки и преимущества изобретения будут понятны при ознакомлении со следующим подробным описанием, данным в сочетании с прилагаемыми чертежами, на которых:
фиг.1 изображает вид, показывающий систему при ее использовании в аэропорту;
фиг.2 изображает схематический вид, показывающий общую компоновку элементов предпочтительной системы, соответствующей настоящему изобретению;
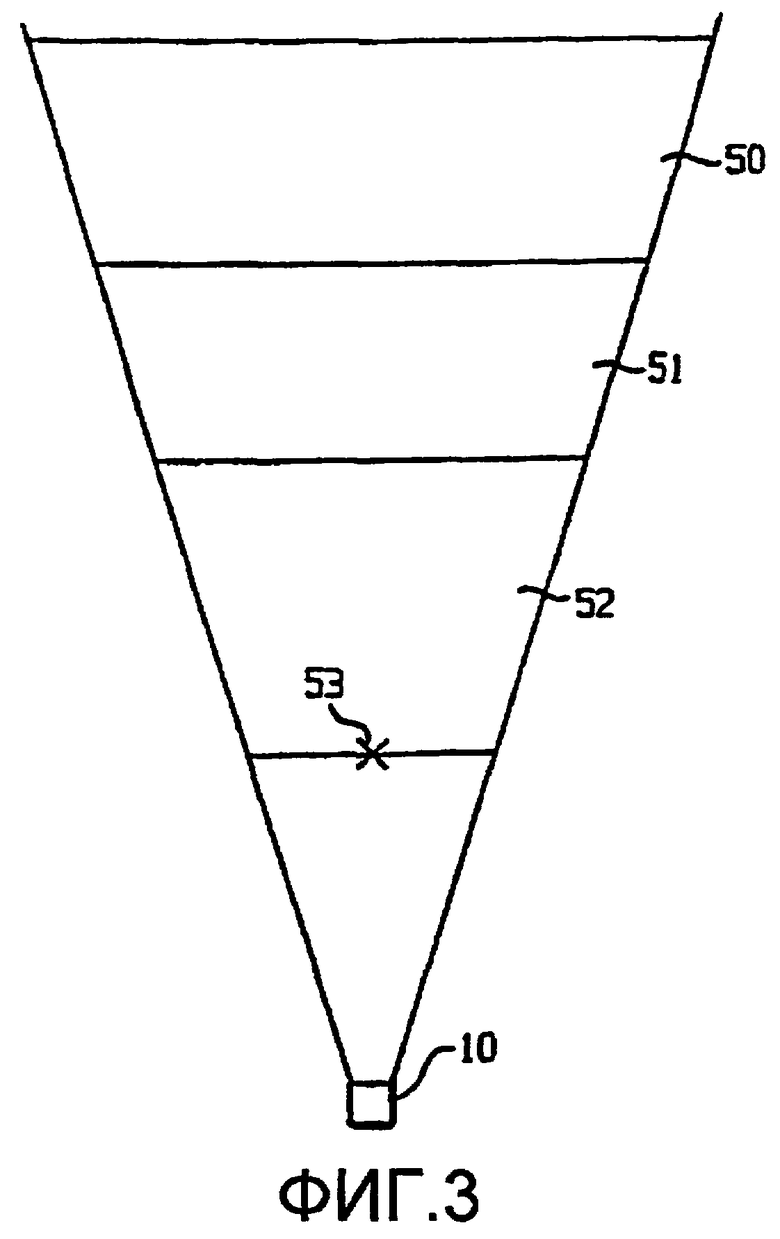
фиг.3 изображает вид сверху в плане, показывающий зону обнаружения перед стыковочным выходом, которая образована для обнаружения и опознавания приближающегося воздушного судна;
фиг.4А и 4В совместно изображают схему последовательности операций, показывающую главную программу и режим парковки работы системы;
фиг.5 изображает схему последовательности операций, показывающую режим калибровки системы;
фиг.6 изображает вид, показывающий компоненты для выполнения режима калибровки;
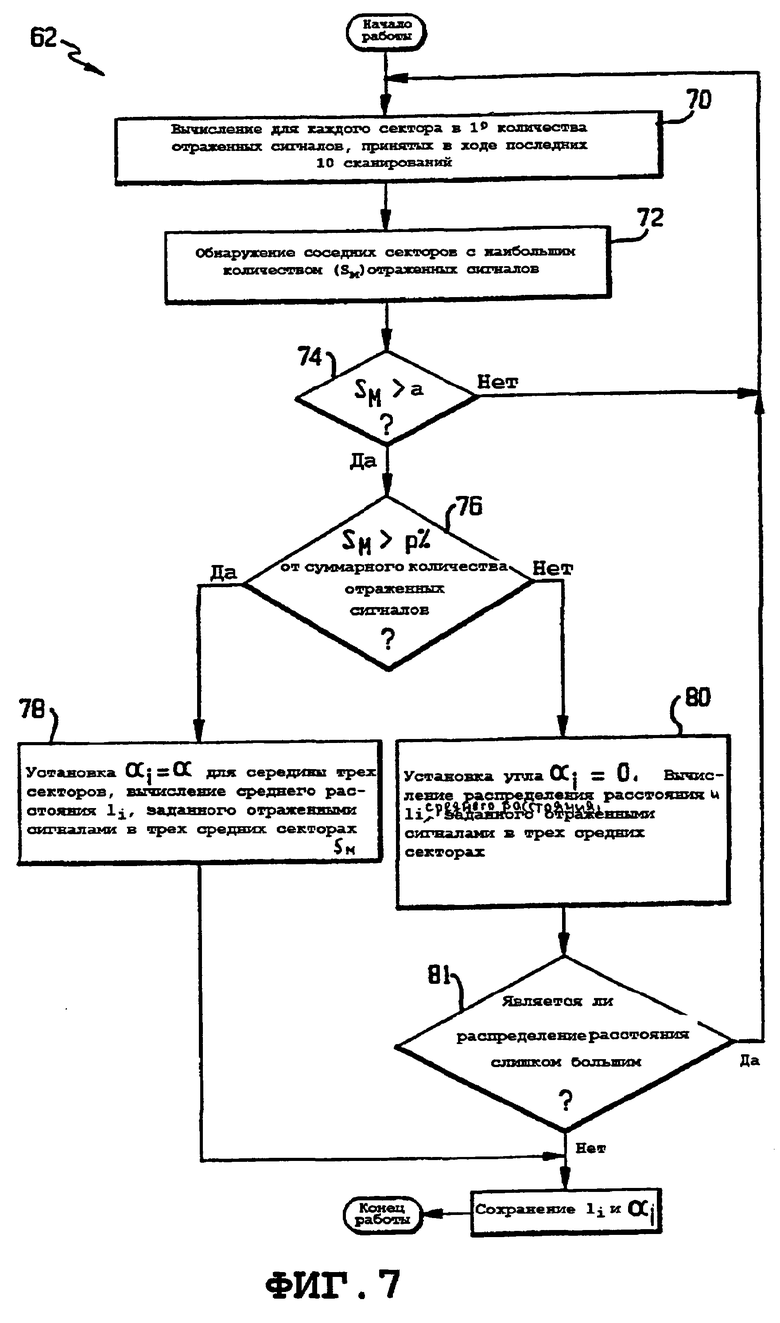
фиг.7 изображает схему последовательности операций, показывающую режим захвата работы системы;
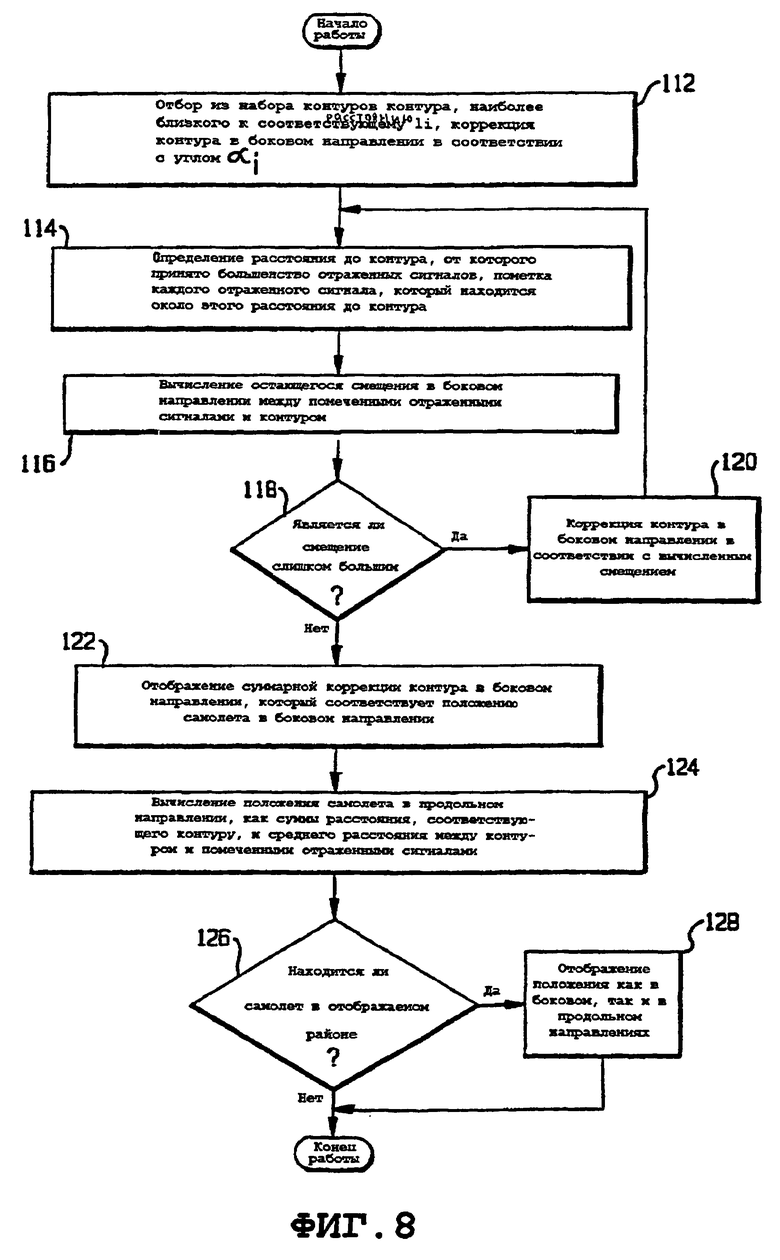
фиг.8 изображает схему последовательности операций, показывающую фазу сопровождения работы системы;
фиг.9 изображает схему последовательности операций, показывающую фазу измерения высоты при работе системы;
фиг.10 изображает схему последовательности операций, показывающую фазу опознавания при работе системы;
фиг.11 изображает схему последовательности операций, показывающую фазу определения признака воздушного судна работы системы;
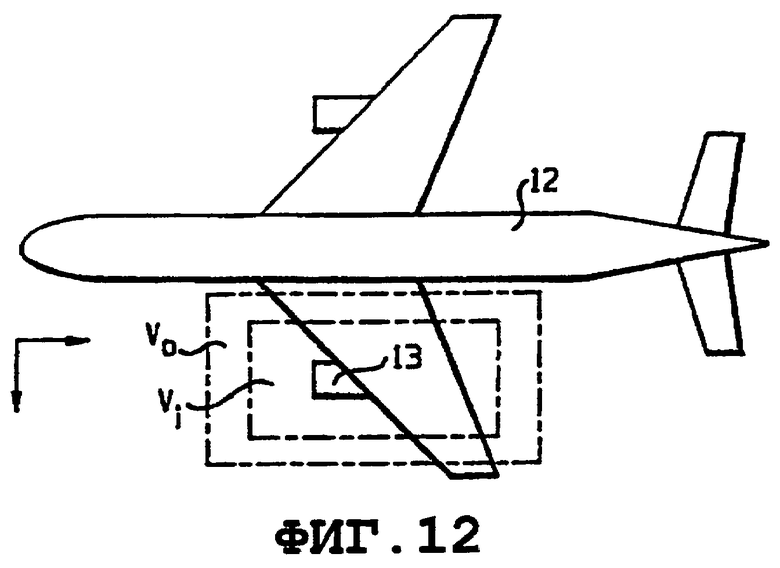
фиг.12 изображает схему, показывающую внутренний и внешний объемы вокруг двигателя воздушного судна, используемые в фазе определения признака воздушного судна;
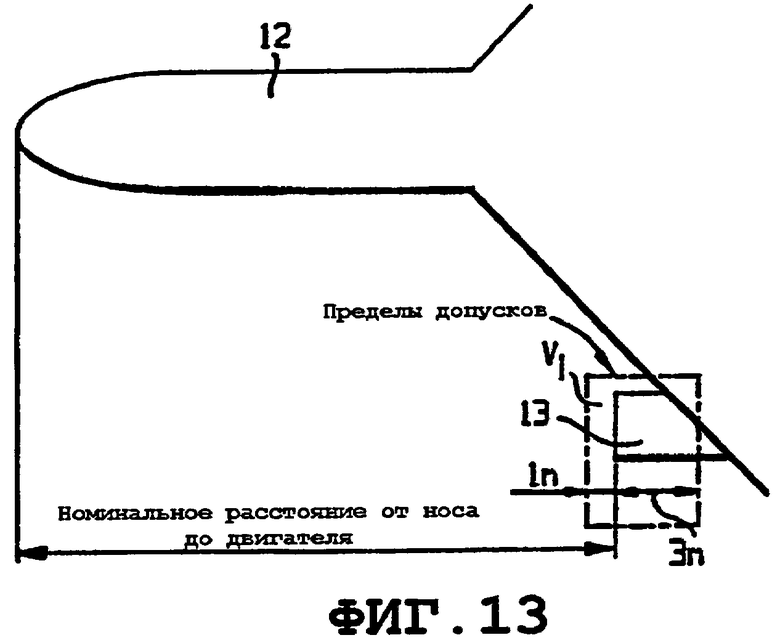
фиг.13 изображает схему, показывающую пределы допусков измеренного расстояния от носа до двигателя для принятия решения о допуске воздушного судна к выходу;
фиг.14 изображает схему, показывающую зависимость запаса безопасности от расстояния между носом и двигателем в ситуации, когда воздушное судно неприемлемого типа паркуется у выхода;
фиг.15 изображает схему последовательности операций, показывающую базовые операции, используемые при опознавании воздушного судна, которое имеет угол рыскания относительно выхода аэропорта;
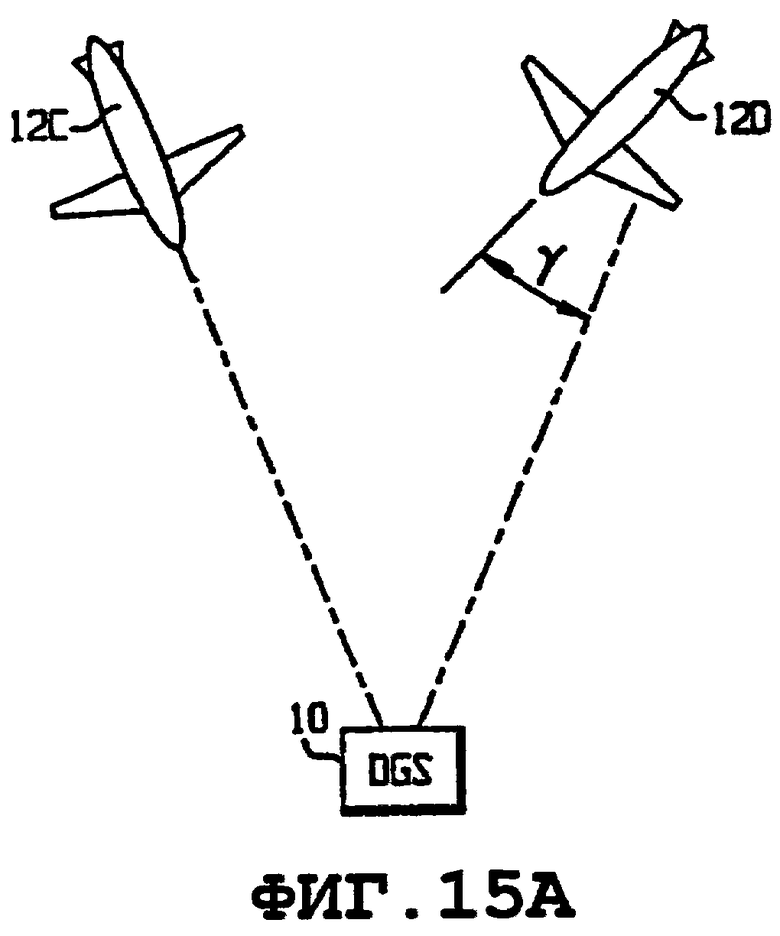
фиг.15А изображает схему, показывающую геометрию угла рыскания;
фиг.16 изображает схему, показывающую геометрию, используемую для определения линий регрессии, которые используются при вычислении угла рыскания;
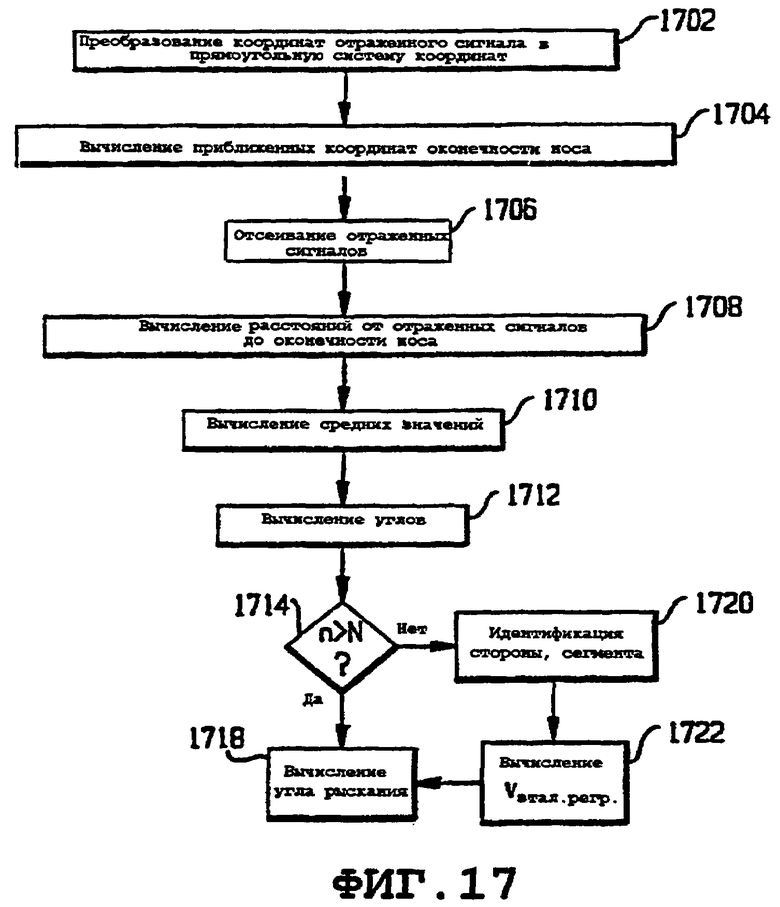
фиг.17 изображает схему последовательности операций, показывающую операции, используемые для вычисления угла рыскания;
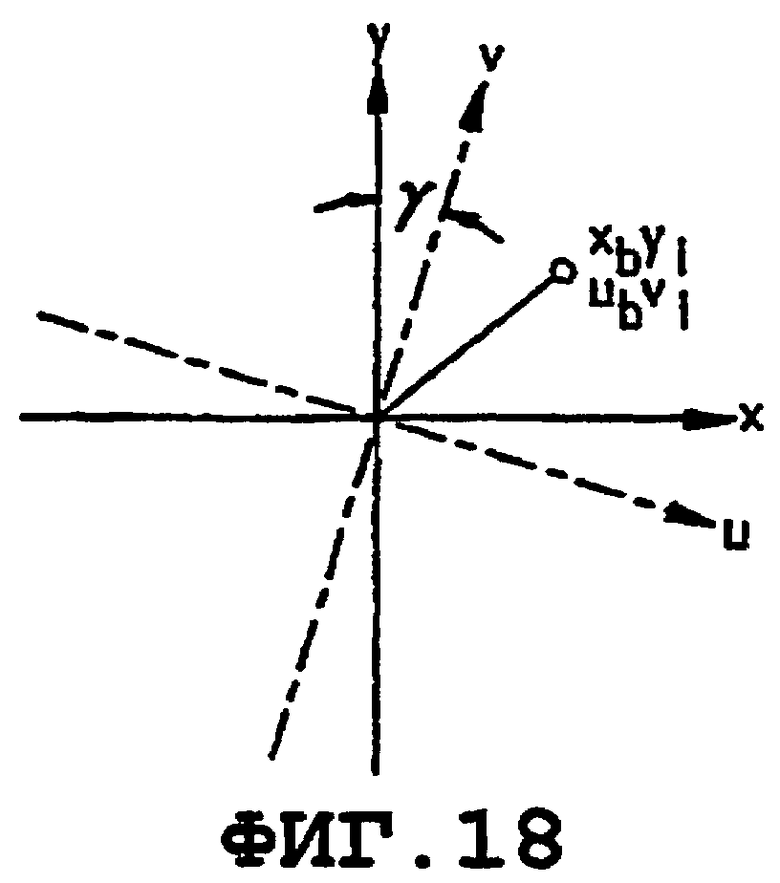
фиг.18 изображает схему, показывающую геометрию, используемую для поворота контура отраженных импульсов;
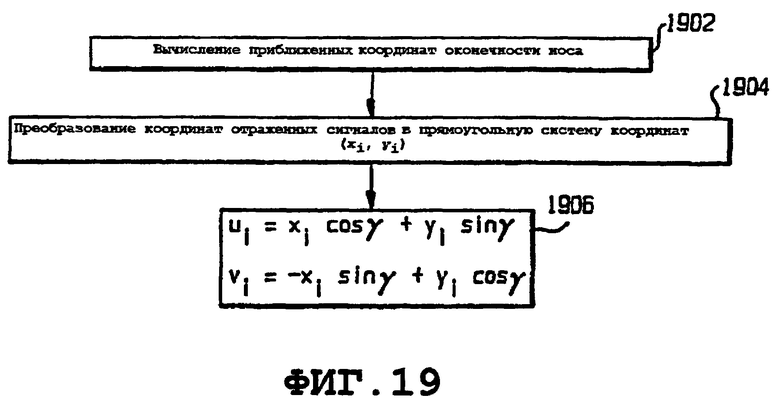
фиг.19 изображает схему последовательности операций, показывающую операции, используемые для поворота контура отраженных импульсов;
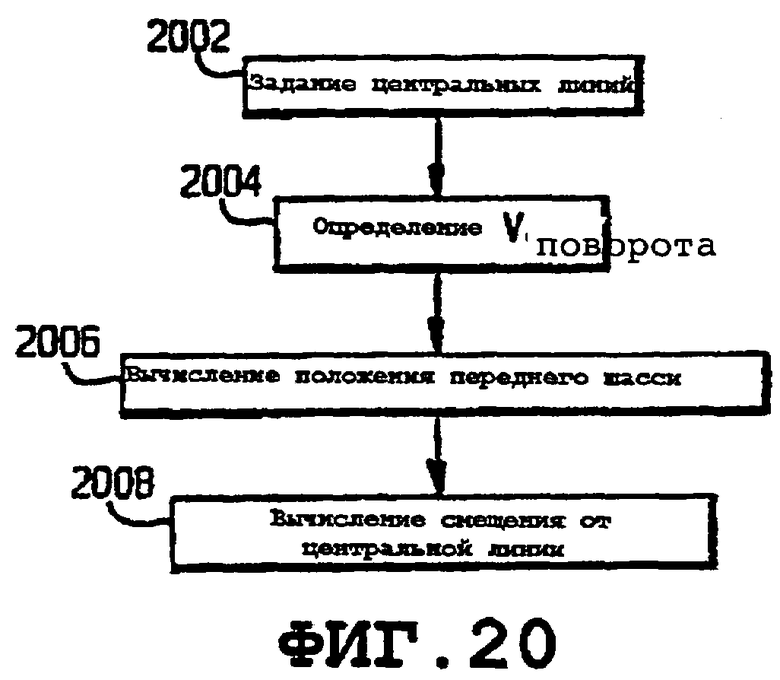
фиг.20 изображает схему последовательности операций, показывающую операции, используемые для вычисления смещения переднего шасси воздушного судна от центральной линии;
фиг.21 изображает схему, показывающую геометрию положения переднего шасси относительно положения носа; и
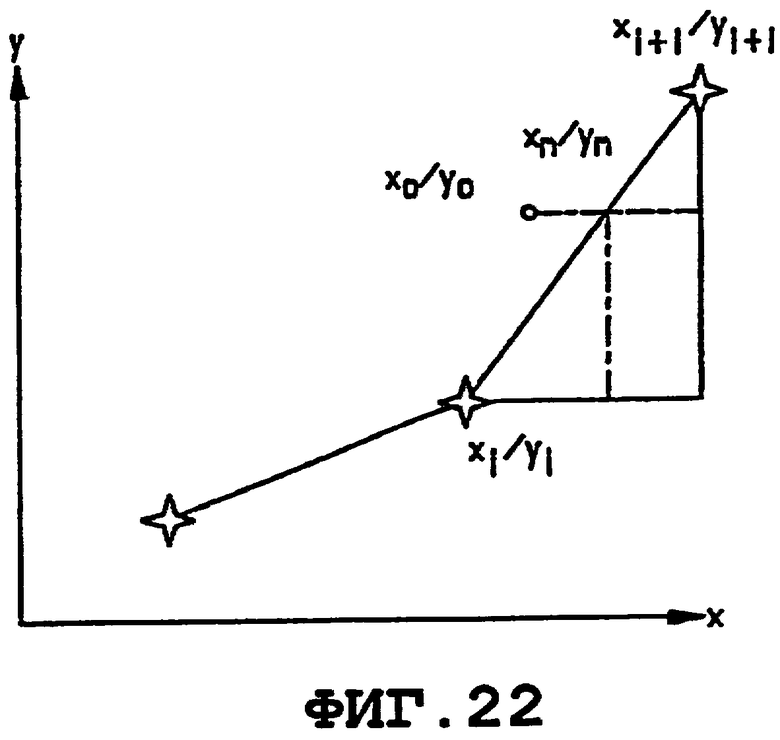
фиг.22 изображает схему, показывающую геометрию положения переднего шасси относительно центральной линии.
Таблица I представляет предпочтительный вариант Таблицы горизонтального эталонного контура, которая используется для установления идентичности воздушного судна данной системой.
Таблица II представляет предпочтительный вариант Таблицы сравнения, которая используется в системах, соответствующих настоящему изобретению, для эффективной и надежной парковки воздушного судна.
Теперь будут сделаны ссылки на фиг.1-22 и Таблицы I-II, на которых одинаковые ссылочные позиции обозначают подобные элементы на разных фигурах. В нижеследующем подробном описании пронумерованные операции, изображенные в схемах последовательности операций, как правило, обозначены номером в круглых скобках, следующим за такими ссылками.
Как показано на фиг.1, системы наведения при парковке, соответствующие настоящему изобретению, в целом обозначенные позицией 10 на фигурах, предусматривают компьютеризированное определение местоположения объекта, проверку идентичности объекта и сопровождение объекта, причем объектом, предпочтительно, является воздушное судно (самолет) 12. При работе, когда диспетчерская башня 14 осуществляет посадку воздушного судна 12, она информирует систему о том, что самолет приближается к выходу 16, и об ожидаемом типе самолета (то есть 747, L-1011 и т.д.). В этом случае система 10 сканирует район перед выходом 16, пока не обнаружит местоположение объекта, который она опознает как самолет 12. Затем система 10 сравнивает измеренный контур воздушного судна 12 с эталонным контуром ожидаемого типа самолета и оценивает другие геометрические признаки ожидаемого типа самолета. Если обнаруженное воздушное судно не соответствует ожидаемому контуру и другим признакам, система информирует диспетчерскую башню 14 или подает ей сигнал и выключается.
Если объектом является ожидаемое воздушное судно 12, система 10 сопровождает его к выходу 16, отображая для пилота в реальном масштабе времени расстояние, оставшееся до надлежащей точки 29 остановки, и положение 31 самолета 12 в боковом направлении. Положение 31 самолета 12 в боковом направлении отображается на дисплее 18, что позволяет пилоту корректировать положение самолета при приближении к выходу 16 под правильным углом. Когда воздушное судно 12 находится в точке 53 его остановки, этот факт отображается на дисплее 18 и пилот останавливает самолет.
Как показано на фиг.2, система 10 включает лазерный дальномер (LRF) 20, два зеркала 21, 22, дисплейный блок 18, два шаговых электродвигателя 24, 25 и микропроцессор 26. Лазерные дальномеры, пригодные для использования согласно настоящему изобретению, поставляет Laser Atlanta Corporation и они способны излучать лазерные импульсы и принимать отражения этих импульсов, отраженные от удаленных объектов, и вычислять расстояние до этих объектов.
Система 10 устроена таким образом, что она имеет соединение 28 между последовательным портом лазерного дальномера 20 и микропроцессором 26. По этому соединению лазерный дальномер 20 посылает данные измерений приблизительно каждую 1/400 долю секунды в микропроцессор 26. Компоненты аппаратного обеспечения системы 20, обозначенные в целом номером 23, управляются программируемым микропроцессором 26. В дополнение к этому микропроцессор 26 подает данные на дисплей 18. В качестве интерфейса для пилота над выходом 16 расположен дисплейный блок 18 для показа пилоту расстояния, на котором находится самолет от точки 29 остановки, типа 30 самолета, который приближается по данным системы, и положения 31 самолета в боковом направлении. Используя этот дисплей, пилот может корректировать подход самолета 12 к выходу 16 для обеспечения того, что самолет будет находиться под правильным углом для достижения выхода. Если дисплей 18 показывает не тот тип 30 самолета, пилот может прервать подход до того, как произойдет какое-либо повреждение. Эта двойная проверка обеспечивает безопасность для пассажиров, самолета и оборудования аэропорта, поскольку, если система пытается парковать больший 747 у выхода, где ожидается 737, это с большой вероятностью может привести к обширным повреждениям.
В дополнение к работе с дисплеем 18 микропроцессор 26 обрабатывает данные, полученные от лазерного дальномера 20 и управляет наведением лазера 20 по соединению 32 с шаговыми электродвигателями 24, 25. Шаговые электродвигатели 24, 25 соединены с зеркалами 21, 22 и приводят их в движение в соответствии с командами микропроцессора 26. Таким образом, посредством управления шаговыми электродвигателями 24, 25, микропроцессор 26 может изменять угловое положение зеркал 21, 22 и наводить лазерные импульсы лазерного дальномера 20.
Зеркала 21, 22 наводят лазерное излучение посредством отражения лазерных импульсов наружу поверх бетонного покрытия аэропорта. В предпочтительном варианте осуществления изобретения лазерный дальномер 20 неподвижен. Сканирование лазером осуществляется зеркалами. Одно зеркало 22 управляет горизонтальным углом наведения лазера, тогда как другое зеркало 21 управляет вертикальным углом наведения. Посредством приведения в действие шаговых электродвигателей 24, 25 микропроцессор 26 управляет угловым положением зеркал и, таким образом, направлением лазерных импульсов.
Система 10 управляет зеркалом 22 горизонтального наведения для выполнения непрерывного горизонтального сканирования в пределах ±10 градусов угловыми шагами приблизительно по 0,1 градуса, которые эквивалентны 16 микрошагам за шаг для шагового электродвигателя Escap EDM-453. Один угловой шаг выполняется при каждом ответном сигнале от считывающего устройства, то есть приблизительно каждые 2,5 мс. Зеркало 21 вертикального наведения может управляться для выполнения вертикального сканирования между +20 и -30 градусами угловыми шагами приблизительно по 0,1 градуса по одному шагу каждые 2,5 мс. Зеркало вертикального наведения используется для вертикального сканирования при определении высоты носа и опознавании воздушного судна 12. В режиме сопровождения зеркало 21 вертикального наведения непрерывно регулируется для поддержания горизонтального сопровождающего сканирования оконечности носовой части самолета 12.
Как показано на фиг.3, система 10 делит расположенное перед нею поле по дальности на три части. Самая дальняя часть на удалении приблизительно от 50 метров является зоной 50 захвата. В этой зоне 50 система обнаруживает носовую часть самолета и делает грубую оценку положения самолета 12 в боковом и продольном направлениях. Внутрь от зоны 50 захвата располагается район 51 опознавания. В этом районе система 10 сверяет контур самолета 12 с хранящимся контуром 51. В этом районе система 10 сверяет контур самолета 12 в части, относящейся к заданной линии на дисплее 18. Наконец, ближайшим к лазерному дальномеру 20 районом является район отображения или район 52 сопровождения. В районе отображения 52 система 10 отображает на дисплее положение самолета 12 в боковом и продольном направлении относительно надлежащего положения остановки с наивысшей для нее степенью точности. В конце района отображения 52 находится точка 53 остановки. В точке 53 остановки самолет будет в правильном положении у выхода 16.
В дополнение к аппаратному обеспечению и программному обеспечению система 10 поддерживает базу данных, содержащую эталонные контуры любого типа самолета, который может здесь появиться. В базе данных система хранит контуры для каждого типа самолета как горизонтальный и вертикальный контуры, представляющие ожидаемый рисунок отраженных сигналов для этого типа самолета.
Обратившись к Таблице I, можно видеть, что система поддерживает горизонтальный контур в форме Таблицы I, в которой ряды 40 представлены угловым шагом и в которой колонки 41 представлены расстоянием до положения остановки для этого типа самолета. В дополнение к этим пронумерованным рядам таблица содержит ряд 42, представляющий вертикальный угол относительно носа самолета на каждом расстоянии до лазерного дальномера, ряд 44, представляющий коэффициент k формы контура, и ряд 45, представляющий количество значений контура для каждого расстояния, соответствующего контуру. Основная часть Таблицы I содержит значения ожидаемых расстояний для данного типа самолета при разных углах сканирования и расстояниях до точки 53 остановки.
Теоретически, 50 угловых шагов и 50 расстояний до точки 53 остановки потребовали бы Таблицы I, содержащей 50×50 или 2500 записей. Однако Таблица I будет фактически содержать значительно меньше записей, поскольку сопоставление профиля не требует ответных результатов при всех углах на всех расстояниях. Представляется, что типичная таблица будет реально содержать от 500 до 1000 значений. Хорошо известная техника программирования дает способы поддержания частично заполненной таблицы без использования памяти, требуемой для полной таблицы.
В дополнение к горизонтальному контуру система 10 поддерживает вертикальный контур для каждого типа самолета. Этот контур хранится так же, как и горизонтальный профиль, за исключением того, что ряды представлены угловыми шагами в вертикальном направлении и записи в колонках содержат меньшее количество расстояний до положения остановки, чем для горизонтального контура. Вертикальный контур требует меньшего количества колонок, поскольку он используется только для опознавания самолета 12 и для определения высоты положения его носа, что происходит в ограниченном диапазоне расстояний от лазерного дальномера 20 в районе 51 опознавания. Следовательно, для сопоставления вертикального контура хранятся только данные для ожидаемых отраженных сигналов в этом диапазоне без лишнего расходования пространства памяти для не являющихся необходимыми значений.
Система 10 использует описанные выше аппаратное обеспечение и базу данных для определения местоположения, опознавания и сопровождения воздушного судна с использованием следующих процедур:
Как показано на фиг.4А и 4В, работа программного обеспечения микропроцессора выполняет главную программу, содержащую подпрограммы для режима 60 калибровки, режима захвата и режима 400 парковки. Микропроцессор сначала выполняет работу в режиме 60 калибровки, затем в режиме 62 захвата и затем в режиме 400 парковки. Когда самолет 12 припаркован, программа заканчивает работу. Эти режимы описаны более подробно ниже:
Режим калибровки
Для обеспечения точности работы системы микропроцессор 26 запрограммирован для самокалибровки в соответствии с алгоритмом, показанным на фиг.5, до захвата самолета 12 и с разными интервалами в ходе сопровождения. Калибровка системы 10 обеспечивает то, что соотношение между работой шаговых электродвигателей 24, 25 и направлением наведения является известным. Также проверяется способность лазерного дальномера 20 измерять дальность.
Как показано на фиг.6, для калибровки в системе 10 используется квадратная пластина 66, находящаяся в известном положении. Пластина 66 установлена в 6 метрах от лазерного дальномера 20 и на такой же высоте, как и лазерный дальномер 20.
Для выполнения калибровки система устанавливает (α,β) на (0,0), при этом лазер направляется строго вперед. Зеркало 22 вертикального наведения затем наклоняется так, что лазерный луч направляется назад, на заднее или дополнительное зеркало 68, которое переориентирует луч на калибровочную пластину 66. (100) Микропроцессор 26 затем приводит в действие шаговые электродвигатели 24, 25 для приведения в движение зеркал 21, 22, пока он не обнаружит центр калибровочной пластины 66. После обнаружения центра калибровочной пластины 66 микропроцессор 26 сохраняет значения углов (αср, βср) в этой точке и сравнивает их с хранящимися ожидаемыми углами. (102) Система 10 также сравнивает полученное расстояние до центра 66 пластины с хранящимся ожидаемым значением. (102) Если полученные значения не соответствуют хранящимся значениям, микропроцессор 26 изменяет калибровочные постоянные, которые задают ожидаемые значения, пока они не будут соответствовать. (104, 106) Однако, если любое из этих значений отклоняется слишком сильно от значений, сохраненных при инсталляции, подается сигнал предупреждения. (108)
Режим захвата
Первоначально диспетчерская башня 14 оповещает систему об ожидаемом приближении самолета 12 и ожидаемом типе самолета. Сигнал приводит программное обеспечение в режим 62 захвата, как показано на фиг.7. В режиме 62 захвата микропроцессор 26 приводит в действие шаговые электродвигатели 24, 25 для наведения лазера для горизонтального сканирования зоны 50 захвата самолета 12. Это горизонтальное сканирование выполняется под вертикальным углом, соответствующим высоте носа ожидаемого типа воздушного судна в средней части зоны 50 захвата.
Для определения правильной высоты сканирования микропроцессор 26 вычисляет вертикальный угол для лазерных импульсов как:
βf=arctan [(H-h)/lf],
где Н - это высота лазерного дальномера 20 над землей, h - это высота носа ожидаемого самолета и lf - это расстояние от лазерного дальномера 20 до середины зоны 50 захвата. Это уравнение дает значение вертикального угла для зеркала 21, который обеспечивает поиск на правильной высоте в середине зоны 50 захвата для ожидаемого самолета 12.
В альтернативном варианте система 10 может хранить в базе данных значения βf для разных типов самолетов на определенном расстоянии. Однако хранение значений βf ограничивает гибкость системы 10, поскольку она в таком случае может захватывать самолет 12 только на одном расстоянии от лазерного дальномера 20.
С использованием этого вертикального угла для зоны 50 захвата микропроцессор 26 направляет лазер для горизонтального сканирования импульсами, разнесенными приблизительно на 0,1 градуса друг от друга. Микропроцессор выполняет горизонтальное сканирование посредством изменения значения α, то есть горизонтального угла от центральной линии, начинающейся от лазерного дальномера 20 между ±αмакс, значение которого вводится при инсталляции. Как правило, αмакс устанавливают на уровне 50, что при разнесении импульсов на 0,1 градуса эквивалентно 5 градусам и дает сканирование в пределах 10 градусов.
Испускание лазерных импульсов дает отраженные сигналы или отражения от объектов в зоне 50 захвата. Устройство обнаружения лазерного дальномера 20 захватывает отраженные импульсы, вычисляет расстояние до объекта по времени между посылкой импульса и приемом отраженного сигнала и посылает вычисленное значение расстояния для каждого отраженного сигнала в микропроцессор 26. Микропроцессор 26 сохраняет в отдельных регистрах устройства для хранения данных суммарное количество отраженных сигналов или импульсов облучения в каждом секторе величиной в 1 градус в зоне 50 захвата. (70) Поскольку импульсы генерируются с интервалами в 0,1 градуса, в каждом секторе может возникать до десяти отраженных сигналов. Микропроцессор 26 сохраняет эти импульсы облучения как переменные, названные sα, где α изменяется от 1 до 10 для представления каждого сектора величиной в 1 градус зоны 50 захвата величиной в десять градусов.
В дополнение к сохранению количества импульсов облучения на сектор микропроцессор 26 сохраняет также в устройстве для сохранения данных значение расстояния от лазерного дальномера 20 до объекта для каждого импульса облучения или отраженного сигнала. Сохранение значения расстояния для каждого отражения требует достаточно емкой запоминающей среды для сохранения до десяти импульсов облучения в каждом секторе величиной в 1 градус зоны 50 захвата или до 100 возможных значений. Поскольку во многих случаях большинство записей будут пустыми, хорошо известная техника программирования уменьшает потребность в такой емкости до уровня ниже 100 регистров, всегда назначенных для этих значений.
Когда данные сканирования готовы, микропроцессор 26 вычисляет суммарное количество отраженных сигналов ST за одно сканирование посредством суммирования значений sα. Затем микропроцессор 26 вычисляет SM, наибольшую сумму количества отраженных сигналов в трех соседних секторах. (72) Другими словами, SM является наибольшей суммой (Sα-1, Sα, Sα+1).
Когда микропроцессор 26 вычислил SM и ST, он определяет, являются ли отраженные сигналы исходящими от самолета 12. Если SM не больше 24 (74), самолет 12 не обнаружен и микропроцессор 26 возвращается к началу работы в режиме 62 захвата. Если наибольшая сумма SM отраженных сигналов больше 24 (74), местоположение "возможного" самолета 12 обнаружено. Если обнаружен "возможный" самолет 12, микропроцессор проверяет, больше ли SM/ST чем 0,5 (76), или что три соседних сектора с наибольшей суммой содержат, по меньшей мере, половину всех отраженных сигналов, принятых при сканировании.
Если SM/ST больше 0,5, микропроцессор 26 вычисляет местоположение центра отраженных сигналов. (78, 82) Угловое положение центра отраженных сигналов вычисляется как:
α1=αv+(Sα+1-Sα-1)/(Sα-2+Sα+Sα+1),
где Sα - это Sα, которая дала SM, и αv это угловой сектор, который соответствует этой Sα.
Положение центра отраженных сигналов в продольном направлении вычисляется как:


где lavi - это измеренные значения или расстояния до объекта для импульсов, которые возвратились отраженными сигналами из сектора αv, и где n - это суммарное количество измеренных значений в этом секторе. (78, 82) Поскольку наибольшее возможное количество измеренных значений составляет десять, n должно быть меньше или равно десяти.
Однако, если SM/ST<0,5, отраженные сигналы могут исходить от снега или другого самолета, находящегося на небольшом удалении. Если причиной является самолет на небольшом удалении, этот самолет вероятно расположен довольно близко к центральной линии и предполагается, что значение αt должно составлять ноль вместо вычисленного выше значения и что lt должно быть средним расстоянием, данным тремя средними секторами. (80) Если распределение расстояния слишком большое, микропроцессор 26 не обнаружил самолет 12 и он возвращается к началу работы в режиме 62 захвата. (81). После вычисления положения самолета 12 система переключается на работу в режиме 400 парковки.
Режим парковки
Режим парковки, показанный на фиг.4А и 4В, включает четыре фазы: фазу 84 сопровождения, фазу 86 измерения высоты, фазу 404 распознавания контура и фазу 408 распознавания признака самолета. В фазе 84 сопровождения система 10 осуществляет текущий контроль положения приближающегося самолета 12 и снабжает пилота информацией об осевом положении 31 и расстоянии до точки 53 остановки самолета при помощи дисплея 18. Система 10 начинает сопровождать самолет 12 посредством горизонтального сканирования.
Как показано на фиг.8, в ходе первого сканирования в фазе сопровождения микропроцессор 26 управляет лазерным дальномером 20 таким образом, чтобы посылать лазерные импульсы одиночными угловыми шагами α или, предпочтительно, с интервалами 0,1 градуса между (αt-αp-10) и (αt+αp+10), где αt определен при работе в режиме 62 захвата как угловое положение центра отраженных сигналов и αр - это наибольшее значение углового положения в текущей колонке контуров, которая содержит значения расстояний.
После первого сканирования совершаются угловые шаги α вперед и назад по одному шагу на принятое от лазерного дальномера значение между (αs-αp-10) и (αs+αp+10), где as - это угловое положение азимута, определенного в ходе предыдущего сканирования.
В фазе 84 сопровождения вертикальный угол β устанавливается на уровне, требуемом для обнаруженного самолета 12 на текущем расстоянии от лазерного дальномера 20, которое получают из Таблицы I эталонных контуров. Колонка текущих контуров - это колонка, представляющая значение положения, которое меньше lt, но ближе к нему.
Микропроцессор 26 использует расстояние до точки 53 остановки для получения значения вертикального угла для текущего расстояния до самолета по Таблице I контуров. В ходе первого сканирования расстояние lt, вычисленное при работе в режиме 62 захвата, определяет надлежащую колонку Таблицы I контуров и, таким образом, угол в направлении самолета 12. Для каждого последующего сканирования микропроцессор 26 использует β в колонке Таблицы I контуров, отражающей текущее расстояние до точки 53 остановки. (112)
Используя данные сканирований и данные Таблицы I горизонтальных контуров, микропроцессор 26 создает Таблицу II сравнения. Таблица II сравнения является двумерной таблицей с номером импульса или номером углового шага под индексом 91i, присвоенным рядам. Используя этот индекс, можно получить следующую информацию для каждого ряда, представленную в колонках таблицы: li92 - измеренное расстояние до объекта для данного углового шага; lk93 - измеренное значение, компенсированное на скос, вызванный смещением (равное li минус величина sm, суммарное смещение в ходе последнего сканирования минус величина i, умноженное на sp, среднее смещение в ходе каждого шага при последнем сканировании, то есть li-(sm-isp)); di94 - расстояние между генерированным контуром и эталонным контуром (равное rij, значение контура для соответствующего угла на расстоянии j контура минус Iki); ai95 - расстояние между носом самолета и измерительным оборудованием (равное rj50, значение эталонного контура при нуле градусов минус di); ае96 - оценочное расстояние до носа после каждого шага (равное am, расстояние до носа в конце последнего сканирования минус величина i, умноженное на sp); аd - разность между оценочным и измеренным расстоянием до носа (равная абсолютному значению ai минус ae); и Примечание 97, показывающее отраженные сигналы, которые вероятно поступили от самолета.
В ходе первого сканирования в фазе 84 сопровождения система 10 использует колонку горизонтального контура, представляющую положение самолета j, которое меньше, но наиболее близко к значению lt. Для каждого нового сканирования выбрана колонка контура, чье значение меньше, но наиболее близко к (аm-sm), где am - это последнее измеренное расстояние до самолета 12 и sm - это смещение самолета в ходе последнего сканирования. Кроме того, значения контура сдвигаются в боковом направлении на αs для компенсации на положение самолета в боковом направлении. (112)
В ходе каждого сканирования микропроцессор 26 также генерирует Таблицу распределения расстояния (DDT). Эта таблица содержит распределение значения si при их появлении в Таблице II сравнения. Таким образом, Таблица распределения расстояния имеет запись, представляющую количество появлений каждого значения ai в Таблице II сравнения с приращениями на 1 метр от 10 до 100 метров.
После каждого сканирования система 10 использует Таблицу распределения расстояния для вычисления среднего расстояния am до надлежащей точки 53 остановки. Микропроцессор 26 просматривает данные в Таблице распределения расстояния для обнаружения двух соседних записей в Таблице распределения расстояния, сумма значений которых является наибольшей. Микропроцессор 26 затем помечает колонку Примечание 97 в Таблице II сравнения в каждом ряду, содержащем запись для ai, соответствующую любому из двух рядов Таблицы распределения расстояния, имеющих наибольшую сумму. (114)
Система 10 затем определяет боковое отклонение при смещении. Сначала микропроцессор 26 устанавливает:
2d=αмакс-αмин,
где αмакс и αмин являются наивысшим и наименьшим значениями α для непрерывного помеченного блока значений dj в таблице II сравнения. Кроме того, микропроцессор 26 вычисляет:

для верхней половины помеченного dj в блоке и:

для нижней половины блока. С использованием Y1 и Y2 вычисляется "а" (116):
a=kx(Y1-Y2)/d2,
где k задан эталонным контуром. Если "а" превышает заданное значение, предпочтительно, установлено как единица, предполагается, что существует боковое отклонение, приблизительно равное "а". Затем колонка li Таблицы II сравнения сдвигается на "а" шагов и Таблица II сравнения пересчитывается. Процесс продолжается, пока "а" не будет меньше эмпирически установленного значения, предпочтительно единицы. Суммарный сдвиг αs колонки li считается равным боковому отклонению или смещению. (116) Если боковое смещение больше заданного значения, предпочтительно установленного как единица, контур корректируется в боковом направлении до следующего сканирования. (118, 120)
После проверки бокового смещения микропроцессор 26 выполняет суммарную коррекцию контура в боковом направлении, который соответствует положению 31 самолета 12 в боковом направлении на дисплее 18. (122)
Микропроцессор 26 затем вычисляет расстояние am до носа самолета
аm=∑ (помеченные ai)/N,
где N - это суммарное количество помеченных ai. По am микропроцессор 26 может вычислить расстояние от самолета 12 до точки 53 остановки посредством вычитания расстояния от лазерного дальномера 20 до точки 53 остановки из расстояния до носа самолета. (124)
После вычисления расстояния до точки 53 остановки микропроцессор 26 вычисляет среднее смещение sm в ходе последнего сканирования. Смещение в ходе последнего сканирования вычисляется как:
Sm=am-1-am,
где аm-1 и аm относятся к последним двум сканированиям. Для первого сканирования в фазе 84 сопровождения Sm установлено как 0.
Среднее смещение в ходе каждого шага вычисляется как:
Sр=Sm/P,
где Р - это суммарное количество шагов за цикл последнего сканирования.
Микропроцессор 26 будет информировать пилота о расстоянии до точки 53 остановки путем ее отображения на дисплейном блоке 18, 29. Благодаря отображению расстояния до точки 29, 53 остановки после каждого сканирования пилот принимает постоянно обновляемую информацию в реальном масштабе времени о том, на каком удалении самолет 12 находится от остановки.
Если самолет 12 находится в отображаемом районе 52, его положение в боковом 31 и продольном 29 направлениях отображается на дисплее 18. (126, 128) Когда микропроцессор 26 отображает положение самолета 12, фаза сопровождения заканчивается.
Когда микропроцессор 26 завершил фазу сопровождения, он подтверждает, что сопровождение не было потеряно посредством проверки того, что суммарное количество помеченных рядов, деленное на суммарное количество измеренных значений или отраженных сигналов в ходе последнего сканирования больше 0,5. (83) Другими словами, если более 50% отраженных сигналов не соответствует эталонному контуру, сопровождение потеряно. Если сопровождение потеряно и самолет 12 находится более чем в 12 метрах от точки остановки, система 10 возвращается к работе в режиме 62 захвата. (85) Если сопровождение потеряно и самолет 12 находится в 12 метрах или менее от точки 53 остановки, система 10 включает сигнал остановки для информирования пилота о потере сопровождения. (85, 87).
Если сопровождение не потеряно, микропроцессор 26 определяет, была ли определена высота носа. (13) Если высота еще не была определена, микропроцессор 26 вступает в фазу 86 измерения высоты. Если высота уже была определена, микропроцессор 26 проверяет, был ли определен (402) контур.
В фазе измерения высоты, показанной на фиг.9, микропроцессор 26 определяет высоту носа, направляя лазерный дальномер 20 для вертикального сканирования. Значение высоты носа используется системой для обеспечения того, чтобы горизонтальное сканирование осуществлялось через оконечность носа.
Для определения высоты носа микропроцессор 26 устанавливает β на заданное значение βмакс и затем шагами понижает его с интервалами в 0,1 градуса по одному на принятый/отраженный импульс, пока оно не достигнет βмин, то есть другого заданного значения. βмин и Рмакс заданы при инсталляции и в типичном варианте составляют -20 и 30 градусов соответственно. После того как β достигло значения βмин, микропроцессор 26 управляет шаговыми электродвигателями 24, 25, пока оно не достигнет значения βмакс. Это вертикальное сканирование выполняется при α, установленном на значение αs, то есть азимутальное положение при предшествовавшем сканировании.
Используя измеренное расстояние до самолета, микропроцессор 26 выбирает колонку в таблице вертикального контура, которая наиболее близка к измеренному расстоянию. (140) Используя данные сканирования и данные из таблицы вертикального контура, микропроцессор 26 создает таблицу сравнения, показанную здесь как Таблица II. Таблица II также является двумерной таблицей с номером импульса или номером углового шага под индексом 91 i, присвоенным рядам. Используя этот индекс, может быть получена следующая информация для каждого ряда, представленная как колонки в таблице: li92 - это измеренное расстояние до объекта в ходе этого углового шага, lki93 - это измеренное значение, компенсированное на скос, вызванный смещением (равное li минус величина Sm, то есть суммарное смещение в ходе последнего сканирования, минус величина 1, умноженная на sp, то есть среднее смещение в ходе каждого шага при последнем сканировании), di94 - это расстояние между генерированным контуром и эталонным контуром (равное rij, то есть значение контура для соответствующего угла на расстоянии j для этого контура минус lki), ai95 - это расстояние между носом самолета и измерительным оборудованием, равное rj50, то есть значению эталонного контура при нуле градусов минус di), ае96 - это оценочное расстояние до носа после каждого шага (равное am, то есть расстоянию до носа в конце последнего сканирования, минус величина i, умноженное на sp), аd - это разность между оценочным и измеренным расстоянием до носа (равная абсолютному значению ai минус ae), и Примечание 97, показывающее отраженные сигналы, которые вероятно вызваны самолетом 12.
В ходе каждого сканирования микропроцессор 26 также генерирует Таблицу распределения расстояния (DDT). Эта таблица содержит распределение значений ai, когда они появляются в Таблице II. Таким образом, Таблица распределения расстояния имеет запись, представляющую количество появлений каждого значения ai в Таблице II с приращениями в 1 метр от 10 до 100 метров.
После каждого сканирования система 10 использует Таблицу распределения расстояния для вычисления среднего расстояния am до надлежащей точки 53 остановки. Микропроцессор 26 просматривает данные в Таблице распределения расстояния для обнаружения двух соседних записей в Таблице распределения расстояния, сумма значений которых является наибольшей. Микропроцессор 26 затем делает отметку в колонке Примечание 97 в Таблице II для каждого ряда, содержащего запись для ai, соответствующую любому из двух рядов в Таблице распределения расстояния, имеющих наибольшую сумму. (142)
После завершения вычисления среднего расстояния до надлежащей точки 53 остановки микропроцессор 26 вычисляет среднее смещение в ходе последнего сканирования, то есть sm. Смещение в ходе последнего сканирования вычисляется как:
sm=am-1-am,
где аm-1 и am относятся к последним двум сканированиям. Для первого сканирования в фазе 84 сопровождения sm устанавливается на 0. Среднее смещение sp в ходе каждого шага вычисляется как:
sp=sm/Р,
где Р - это суммарное количество шагов в цикле последнего сканирования.
Вычисление фактической высоты носа выполняется сложением номинальной высоты носа, то есть заданной высоты носа ожидаемого незагруженного самолета, и вертикального отклонения или отклонения по высоте. Следовательно, для определения высоты носа система 10 сначала определяет вертикальное отклонение или отклонение по высоте. (144) Вертикальное отклонение вычисляется установкой:
2d=βмакс-βмин
где βмакс и βмин - это наивысшее и наименьшее значения β для непрерывного помеченного блока значений di в Таблице II сравнения. Кроме того, микропроцессор 26 вычисляет:

для верхней половины помеченного di в блоке и

для нижней половины блока. С использованием Y1 и Y2 вычисляется "а":
a=kx(Y1-Y2)/d2,
где k задан эталонным контуром. Если "а" превышает заданное значение, предпочтительно единицу, считается, что существует вертикальное отклонение, приблизительно равное "а". Колонка li затем сдвигается на "а" шагов. Таблица II сравнения отображается заново и "а" пересчитывается. Этот процесс продолжается, пока "а" не станет меньше заданного значения, предпочтительно единицы. Суммарный сдвиг βs колонки li считается равным отклонению по высоте. (144) Значения βj в Таблице II сравнения затем корректируются как βj+Δβj, где отклонение Δβj по высоте равно:
Δβj=βs×(amβ+as)/(aj+as)
и где amβ - это действительное значение аm, когда было вычислено значение βs.
Когда отклонение по высоте определено, микропроцессор 26 проверяет, больше ли оно, чем заданное значение, предпочтительно единица. (146) Если отклонение больше, чем это значение, микропроцессор 26 корректирует контур по вертикали в соответствии со смещением. (148) Микропроцессор 26 сохраняет корректировку по вертикали как отклонение от номинальной высоты носа. (150) Фактической высотой носа самолета является номинальная высота носа плюс отклонение.
Если высота носа определена или когда отработана фаза 86 измерения высоты, микропроцессор 26 вступает в фазу опознавания, показанную на фиг.10. (133, 88) В фазе 88 опознавания микропроцессор 26 создает Таблицу II сравнения для отражения результатов еще одного вертикального сканирования и содержания таблицы контуров. (152, 154) Еще одно вертикальное сканирование выполняется в фазе 88 опознавания, поскольку предшествующее сканирование могло дать достаточно данных для определения высоты, но не достаточно для опознавания. Фактически может потребоваться выполнение нескольких сканирований до того, как может быть получено уверенное опознавание. После вычисления (156) вертикального смещения, проверки (158) того, что оно не слишком велико, и коррекции (160) контура по вертикали в соответствии со смещением, пока смещение не уменьшится до уровня, который ниже заданного значения, предпочтительно единицы, микропроцессор 26 вычисляет среднее расстояние между помеченными отраженными сигналами и контуром и среднее расстояние между помеченными отраженными сигналами и этим средним расстоянием. (162)
Среднее расстояние dm между измеренным и скорректированным контуром и отклонение Т от среднего расстояния вычисляются после выполнения вертикального и горизонтального сканирований следующим образом:
dm=∑di/N
T=∑|di-dm|/N
Если Т меньше заданного значения, предпочтительно - 5 для обоих контуров, самолет 12 считается самолетом надлежащего типа при условии, что принято достаточное количество отраженных сигналов. (164) Определение, получено ли достаточное количество отраженных сигналов, основано на:
N/размер>0,75,
где N - это количество "признанных действительными" отраженных сигналов и "размер" - это максимальное возможное количество значений. Если самолет 12 не является самолетом надлежащего типа, микропроцессор включает 136 сигнал остановки и приостанавливает работу в режиме 400 парковки.
Если контур определен (402) или когда отработана фаза (404) определения контура, микропроцессор 26 определяет, опознан ли (406) признак самолета. Если нет, начинается фаза (408) определения признака самолета, показанная на фиг.11 и 12.
Для проверки соответствия признака отраженные сигналы должны возвратиться от района, где расположен двигатель ожидаемого самолета. Когда существует некоторая неопределенность в измерении, могут возникать отраженные сигналы, которые фактически приходят от двигателя, но воспринимаются как приходящие снаружи от двигателя. Таким образом должно быть ограничено пространство Vi, названное внутренним объемом или активным объемом вокруг двигателя, чтобы отраженные сигналы, поступающие из Vi, рассматривались как исходящие от двигателя. На фиг.12 показан образец Vi вокруг двигателя 13 самолета 12.
Двигатель отличается тем, что при горизонтальном сканировании существует отражающая поверхность, окруженная свободным пространством. Для того чтобы иметь возможность видеть различия между двигателем и, например, крылом, должно быть ограничено еще одно пространство Vo вокруг двигателя, откуда не должно поступать (или поступать очень мало) отраженных сигналов. Пространство Vo названо внешним объемом или пассивным объемом. На фиг.12 также показан образец Vo вокруг Vi.
Двигатель задан его координатами (dx, dy, dz) центра передней стороны относительно носа и его диаметром D. Эти параметры хранятся в базе данных для всех типов воздушных судов.
Vi и Vo заданы распространением в боковом направлении (направление х) и в продольном направлении (направление z) от этого центра двигателя. Вертикальное положение двигателя задано как (высота носа + dy).
Для двигателя на крыле Vi и Vo заданы следующими диапазонами координат:
Vi:
направление х: ±(D/2+1 м)
направление z: +3 м, -1 м
Vo:
направление х: ±2 м от Vi
направление z: ±1,5 м от Vi
Для двигателей в хвостовой части определение аналогичное за исключением Vo в направлении х, которое задано как +2 м от Vi. В противном случае, отраженные сигналы от фюзеляжа могли бы поступать из Vo и признак бы не удовлетворял требованиям.
В конечном итоге, признаком является:
Vi/(Vi+Vo)>0,7
Пороговое значение 0,7 признака определено эмпирическим путем. Таким образом, выше даны пределы для Vi и Vo. В данный момент эти значения подобраны так, что нежелательные ошибки опознавания исключены и они отличаются только в зависимости от того, находится ли двигатель на крыле или на хвостовой части. По мере накопления данных они будут корректироваться, вероятно, по-разному для разных типов воздушных судов для достижения все лучшего и лучшего опознавания.
В фазе 408 опознавания признака самолета применяются указанные выше принципы, как показано в схеме последовательности операций на фиг.11. Когда начинается фаза опознавания признака самолета, лазерный дальномер наводится на двигатель или другой избранный признак самолета в ходе операции 1102. В ходе операции 1104 обнаруживается ряд отраженных сигналов из Vi и в ходе операции 1106 обнаруживается ряд отраженных сигналов из Vo. В ходе операции 1108 определяют, превышает ли Vi/(Vi+Vo) пороговое значение. Если да, то обозначается, что признак самолета соответствует ожидаемому (ОК) в ходе операции 1110. В противном случае обозначается, что признак самолета не соответствует ожидаемому (не ОК) в ходе операции 1112.
Если признак самолета определен (406) или когда фаза опознавания признака завершена (408), микропроцессор 26 определяет (410), опознан ли самолет 12. Если самолет 12 был опознан, микропроцессор 26 проверяет, достиг ли самолет 12 положения остановки. (412) Если положение остановки достигнуто, микропроцессор 26 включает сигнал остановки, при котором система 10 завершает работу в режиме 400 парковки. (414) Если самолет 12 не достиг положения остановки, микропроцессор 26 возвращается к фазе 84 сопровождения.
Если самолет 12 не опознан, микропроцессор 26 проверяет, находится ли самолет на расстоянии, меньшем или равном 12 метрам от положения 53 остановки. (416) Если самолет 12 находится на расстоянии не более 12 метров от положения 53 остановки, система 10 включает сигнал остановки для информирования пилота о том, что опознавание не удалось. (418) После отображения сигнала остановки система 10 выключается.
Если самолет 12 находится более чем в 12 метрах от положения 53 остановки, микропроцессор 26 возвращается к фазе 84 сопровождения.
В одном возможном варианте осуществления изобретения в качестве признака самолета используется номинальное расстояние (в продольном и боковом направлениях) от носа до двигателя. В этом варианте парковка прекращается, если расстояние от носа до двигателя, измеренное в ходе операции 408, более чем на два метра короче, чем это расстояние у ожидаемого самолета. Если разность находится в пределах двух метров, то все же можно безопасно принять самолет неожидаемого типа. В этом случае, если запас безопасности между двигателем и конструкциями выхода аэропорта составляет три метра для ожидаемого типа самолета, запас безопасности для другого типа самолета все же составляет, по меньшей мере, один метр. Испытания показали, что местоположение двигателя может определяться с точностью ±1 метр и что высота носа может определяться с точностью ±0,5 метра.
На фиг.13 показано номинальное расстояние от носа до двигателя самолета 12. Расстояние от носа самолета до его двигателя 13 представляет особый интерес, поскольку двигатель 13 находится в таком положении, что неправильное опознавание может привести к столкновению между двигателем 13 и компонентом выхода аэропорта. Также показаны передний и задний пределы допусков для расположения двигателя 13, которые определяют протяженность вперед и назад объема Vi.
На фиг.14 показано применение описанной выше процедуры опознавания и, в частности, показано, что может происходить, если система настроена для ожидаемого самолета 12А, но к выходу аэропорта пытаются парковать другой самолет 12В. Если к выходу аэропорта допущен самолет 12В типа, отличающегося от типа ожидаемого самолета 12А, самолет 12В будет остановлен так, что его нос будет находиться в том же положении, в котором бы находился нос остановленного ожидаемого самолета 12А. В результате запас безопасности, которым является расстояние от двигателя до ближайшего компонента выхода аэропорта, такого как телескопический трап 15 для пассажиров, является разным для самолетов 12А и 12В, если расстояния от носа до двигателя для этих самолетов разные. Как можно видеть на фиг.14, запас безопасности для самолета 12В равен запасу безопасности для самолета 12А минус разность расстояний от носа до двигателя. Например, если запас безопасности для самолета 12А составляет 3 метра и расстояние от носа до двигателя у самолета 12В на 3,5 метра короче, чем у самолета 12А, двигатель 13В самолета 12В столкнется с телескопическим трапом 15. Таким образом, если самолеты всех типов, у которых расстояние от носа до двигателя слишком мало по сравнению с этим расстоянием у ожидаемого самолета 12А, будут остановлены, то есть не допущены к выходу аэропорта, запас безопасности может всегда поддерживаться на допустимом уровне.
Теперь будет рассмотрена ситуация, когда самолет находится под углом относительно системы 10 наведения при парковке. Как показано на фиг.15А, первый самолет 12С может быть правильно выровненным относительно системы 10 наведения при парковке, тогда как второй самолет 12D может отклоняться от линии правильного выравнивания на угол γ рыскания. В общих чертах описание технического решения, используемого в такой ситуации, сводится к тому, что определяют угол рыскания самолета и контур поворачивают так, чтобы он соответствовал углу рыскания.
На фиг.15 показана схема последовательности операций при таком техническом решении. В ходе операции 1502 полярные координаты отраженных сигналов, возвратившихся от самолета, преобразуются в прямоугольную систему координат. В ходе операции 1504 вычисляется угол рыскания. В ходе операции 1506 контур отраженных сигналов поворачивается. В ходе операции 1508 уже описанным способом обнаруживаются идентификационные характеристики.
Операция 1502 выполняется следующим образом. Координаты отраженного сигнала, принятого от самолета, преобразуются из полярных координат (αj, rj) в прямоугольную систему координат (xj, yj) с началом координат на оконечности носа (αноса, αноса) и с осью у вдоль линии от лазерного блока через оконечность носа:
xj=rjsinαj
yj=rjcosj-rноса.
Операция 1504 выполняется способом, который будет изложен со ссылками на фиг.16 и 17. Фиг.16 изображает схему, показывающую геометрию линий регрессии по обе стороны от оконечности носа. На фиг.17 показана схема последовательности операций в алгоритме. Алгоритм основан на линиях регрессии, вычисленных для отраженных сигналов в ограниченном районе позади оконечности носа. Если существует достаточное количество отраженных сигналов по обе стороны от носа, то угол рыскания вычисляется по разности углов между линиями регрессии. Если может быть вычислена только одна линия регрессии для одной стороны носа, например, вследствие наличия угла рыскания, то угол рыскания вычисляется по разности углов между этой линией регрессии и соответствующей частью эталонного контура.
В ходе операции 1702 координаты отраженного сигнала преобразуются в прямоугольную систему координат (xj, yj) описанным выше образом. В ходе операции 1704 вычисляются приближенные координаты оконечности носа.
В ходе операции 1706 отраженные сигналы просеиваются следующим образом. Отраженные сигналы, не являющиеся представительными для общей конфигурации рисунка отраженных сигналов, удаляются до вычисления угла рисунка отраженных сигналов. Просеивание отраженных сигналов начинается от начала координат (указанной оконечности носа) и при этом удаляются оба отраженных сигнала, если отраженный сигнал при следующем угловом шаге под большим углом соответствует такому же или меньшему расстоянию.
В ходе операции 1708 для каждого отраженного сигнала расстояние Rnj до оконечности носа вычисляется следующим образом:
В ходе операции 1710 для каждой стороны от оконечности носа отбираются отраженные сигналы, которым соответствуют Rnj, которые больше Rмин, которая является постоянной (в пределах 1-2 м), определенной особо для каждого типа самолета. В ходе операции 1712 вычисляются следующие средние значения:
xлев.средн=1/nлев×∑xjлев хправ.средн=1/nправ×∑xjправ
улев.средн=1/nлев×∑уjлев управ.средн=1/nправ×∑уjправ
x2 лев.средн=1/nлев×∑х2 jлев х2 прав.средн=1/nправ×∑2 jправ
хулев.средн=1/nлев×∑(xjлевхуjлев) ×управ.средн=1/nправ×∑(xправ×управ),
где n=количеству отраженных сигналов, которое ≥ Rмин на соответствующей стороне, и нижний индекс прав. или лев. обозначает соответствующую сторону, на которую направляется конкретное количество импульсов,.
В ходе операции 1712 вычисляется каждый угол Vрег линии регрессии относительно оси у:
Нижний индекс сред. следует читать как левый средний или правый средний в соответствии с тем, вычисляется ли угол на левой или на правой стороне носа.
Угол γ рыскания вычисляется следующим образом. В ходе операции 1714 определяют, превышает ли количество n отраженных сигналов на обеих сторонах носа заданное значение N, например 5. Если да, то в ходе операции 1718 γ вычисляется следующим образом:
γ=(vрег.лев+vрег.прав)/2,
где vрег.лев и vрег.прав - это углы, вычисленные для левой и правой сторон носа с использованием процедуры операции 1712. С другой стороны, если n<N на одной стороне носа, для вычисления используется эталонный контур. В ходе операции 1720 опознают сторону и сегмент контура, которые соответствуют стороне, где n>N. В ходе операции 1722 вычисляют угол vэтал.рег для этого сегмента с использованием процедуры операции 1712. Затем в ходе операции 1718 вычисляют γ как γ=(vэтал.рег-vрег).
Когда угол рыскания вычислен, в ходе операции 1506 соответственно поворачивается контур отраженных сигналов. Более конкретно, контур отраженных сигналов преобразуют из прямоугольной системы координат (х, у) в другую (u, v), которая имеет то же начало координат, но повернута на угол, равный углу γ рыскания, как показано на фиг.18. Теперь со ссылками на фиг.18 и 19 будет описано вращение контура отраженных сигналов.
В ходе операции 1902 вычисляют приближенные координаты оконечности носа. В ходе операции 1904 координаты отраженных сигналов преобразуются из полярных в прямоугольные координаты (х, у) с началом координат системы координат в оконечности носа. Техника выполнения этой операции была описана выше. В ходе операции 1906 координаты отраженных сигналов преобразуются из системы координат (х, у) в систему координат (u, v), показанную на фиг.18, согласно следующим формулам:
ui=xicosγ+уisinγ;
vi=-xisinγ+yicosγ.
Координаты отраженного сигнала, будучи таким образом повернутыми, используются для опознавания самолета описанным выше способом.
Теперь со ссылками на фиг.20-22 будет описано, как устанавливают параметры, определяющие центральные линии (CL), как изогнутые, так и прямые. Одна система парковки может оперировать несколькими центральными линиями с применением техники, которая будет описана.
Центральная линия задана как кусочно-линейная кривая, где α, l - это координаты (α - в боковом направлении, l - в продольном направлении) для точек разрыва непрерывности, и они используются как определяющие параметры. Количество используемых координат избирают с учетом требуемой точности позиционирования. Таким образом, центральная линия определяется координатами двух точек (например, на расстоянии захвата и в точке остановки). Количество координат, требуемое для изогнутой центральной линии, зависит от ее радиуса.
Микропроцессор 26 используется в режиме установки центральной линии в ходе операции 2002, когда центральные линии отображаются в микропроцессоре. Задаваемую центральную линию выбирают из меню. Одну или более калибровочных вех с известной высотой и вершиной, которая легко распознается на калибровочной картинке, помещают в разных местоположениях на центральной линии. Для каждой вехи вписывают высоту вехи и вершину вехи отмечают при ее появлении на калибровочной картинке. Координаты α и l вехи автоматически вводятся в таблицу для данной центральной линии. Процедура повторяется для каждой вехи. Координаты для разных вех распределяются по порядку в таблице по их значениям l. Количество необходимых вех зависит от типа центральной линии, при этом прямая центральная линия требует только двух и изогнутая центральная линия требует большего количества вех.
Теперь будет описано вычисление смещения носа от переднего шасси. Центральная линия в нормальном виде дана как идеальная линия движения переднего шасси, но наведение самолета обычно основано на положении носа. Это означает в случае с изогнутой центральной линией, что либо координаты центральной линии должны быть преобразованы в координаты носа, либо положение носа должно быть преобразовано в положение переднего шасси. Выбрано последнее, что означает, что угол рыскания (vповорота) самолета определяется в ходе операции 2004, как описано выше.
Положение (αw, lw) переднего шасси вычисляется в ходе операции 2006 следующим образом:
αw≫αn+lnw×sinvrot/(ln×cosvrot) (в радах)
lw≫ln+lnw×cosvrot,
где
αn, ln: измеренное положение носа;
lnw: расстояние до переднего шасси;
vrot: оценочный угол рыскания самолета.
Смещение переднего шасси от центральной линии вычисляется в ходе операции 2008 следующим образом:
Смещение=αi-αw+(lw-li)(αi+i-αi)/(li+i-li),
где
ai, li - это пара координат центральной линии, в которой значение li является ближайшим меньшим, чем значение lw; и
αi+1, li+1 - это пара координат центральной линии, в которой значение li является ближайшим большим, чем значение lw.
Теперь со ссылками на фиг.21 будут показаны вычисления в ходе операции 2006, где:
lnw: расстояние до переднего шасси
v: оценочный угол рыскания самолета
х: оценочное положение переднего шасси в боковом направлении
αw≫αn+x/(ln+lnw×cosv) (в радах)
lw≫ln+lnw×cosv
x=lnw×sinv
Теперь со ссылками на фиг.22 будут показаны вычисления в ходе операции 2008, где х0/у0 представляет положение переднего шасси и хi/уi представляет точки разрыва непрерывности кусочно-линейной модели изогнутой центральной линии. "Реальным" смещением от центральной линии является расстояние, измеренное под прямым углом к центральной линии. Приближенным значением этого расстояния является расстояние, измеренное под прямым углом к лазерному лучу, исходящему от системы парковки. Это расстояние соответствует значению (xm-х0) на фиг.22. Поскольку абсолютное значение смещения не играет важной роли, используют приближенное значение. Из показанного на фиг.22 следует, что:
Смещение=(хm-х0)=xi-x0+(у0-уi)(xi+1-xi)/(уi+1-уi).
Хотя выше был подробно описан предпочтительный вариант осуществления настоящего изобретения, специалист в данной области техники легко поймет, что в рамках настоящего изобретения могут быть выполнены другие варианты. Например, хотя фаза 408 опознавания признака самолета описана с использованием отношения Vi/(Vi+Vo), вместо этого может использоваться разность Vi-Vo. Кроме того, приведенные выше конкретные числовые диапазоны следует рассматривать как иллюстративные, а не вносящие ограничение. Специалист в данной области техники сможет вывести другие числовые диапазоны при необходимости адаптации изобретения к другим моделям воздушных судов или к конкретным потребностям разных аэропортов. Кроме того, хотя использование линий регрессии является применимым техническим решением для определения угла рыскания, для этой цели может использоваться любое другое техническое решение. Таким образом, настоящее изобретение следует рассматривать в объеме прилагаемой формулы изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| ИДЕНТИФИКАЦИЯ САМОЛЕТА И СИСТЕМЫ УПРАВЛЕНИЯ ШВАРТОВКОЙ | 1994 |
|
RU2155384C2 |
| СПОСОБ И СИСТЕМА НАБЛЮДЕНИЯ ЗА НАЗЕМНЫМ ДВИЖЕНИЕМ ПОДВИЖНЫХ ОБЪЕКТОВ В ПРЕДЕЛАХ УСТАНОВЛЕННОЙ ЗОНЫ АЭРОДРОМА | 2012 |
|
RU2521450C2 |
| СПОСОБ ИДЕНТИФИКАЦИИ ВОЗДУШНОГО СУДНА ПРИ ПАРКОВКЕ У ВЫХОДА ДЛЯ ПАССАЖИРОВ ИЛИ НА МЕСТЕ СТОЯНКИ | 2013 |
|
RU2625399C2 |
| СПОСОБ ВНЕШНЕГО РАДИОЛОКАЦИОННОГО ВЫЯВЛЕНИЯ ФАКТА НАЛИЧИЯ ТРАЕКТОРНЫХ НЕСТАБИЛЬНОСТЕЙ ПОЛЕТА ВОЗДУШНОГО ОБЪЕКТА С МАЛЫМ КУРСОВЫМ УГЛОМ ПЕРЕМЕЩЕНИЯ | 2009 |
|
RU2410717C2 |
| СПОСОБ И УСТРОЙСТВО АВТОМАТИЗИРОВАННОГО ОПРЕДЕЛЕНИЯ КООРДИНАТ И ПОДАВЛЕНИЯ ОПТИКО-ЭЛЕКТРОННЫХ СРЕДСТВ МАЛЫХ БЕСПИЛОТНЫХ ВОЗДУШНЫХ СУДОВ | 2018 |
|
RU2680605C1 |
| СПОСОБ И СИСТЕМА ЗАЩИТЫ ВОЗДУШНЫХ СУДОВ ОТ РАКЕТ ПЕРЕНОСНЫХ ЗЕНИТНЫХ РАКЕТНЫХ КОМПЛЕКСОВ | 2012 |
|
RU2511513C2 |
| Система парковки воздушного судна | 2017 |
|
RU2684885C1 |
| СПОСОБ ВНЕШНЕГО РАДИОЛОКАЦИОННОГО ВЫЯВЛЕНИЯ ФАКТА НАЛИЧИЯ ТРАЕКТОРНЫХ НЕСТАБИЛЬНОСТЕЙ ПОЛЕТА У ВОЗДУШНОГО ОБЪЕКТА ПО СТРУКТУРЕ ЕГО ИМПУЛЬСНОЙ ХАРАКТЕРИСТИКИ | 2014 |
|
RU2562060C1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ИДЕНТИФИКАЦИИ ВОЗДУШНОГО СУДНА И УКАЗАНИЯ ТИПА ВОЗДУШНОГО СУДНА ПРИ ПАРКОВКЕ У ВЫХОДА ДЛЯ ПАССАЖИРОВ ИЛИ НА МЕСТЕ СТОЯНКИ | 2013 |
|
RU2624642C2 |
| АЭРОДРОМНЫЙ АВТОМАТИЗИРОВАННЫЙ КОМПЛЕКС МОНИТОРИНГА, УПРАВЛЕНИЯ И ДЕМОНСТРАЦИИ ПОЛЕТОВ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2010 |
|
RU2426074C1 |












Изобретение относится к системам опознавания и сопровождения при парковке воздушных судов. Технический результат заключается в повышении безопасности и эффективности парковки. Для опознавания воздушного судна используют лазерный дальномер, который наводят на воздушное судно и по отраженным сигналам получают контур и сравнивают с известными контурами. Для отличия от самолетов с подобными контурами лазерный дальномер наводят на объем, в котором ожидается наличие признака, такого как двигатель, и на другой объем, в котором не ожидается наличие признака. Сигналы, отраженные из двух объемов, используют для определения, находится ли двигатель в ожидаемом местоположении. Если да, то воздушное судно опознается как самолет ожидаемого типа и его допускают к парковке. В противном случае самолет останавливают. В качестве дополнительного идентификационного признака может использоваться высота носа. 6 н. и 26 з.п. ф-лы, 24 ил., 2 табл.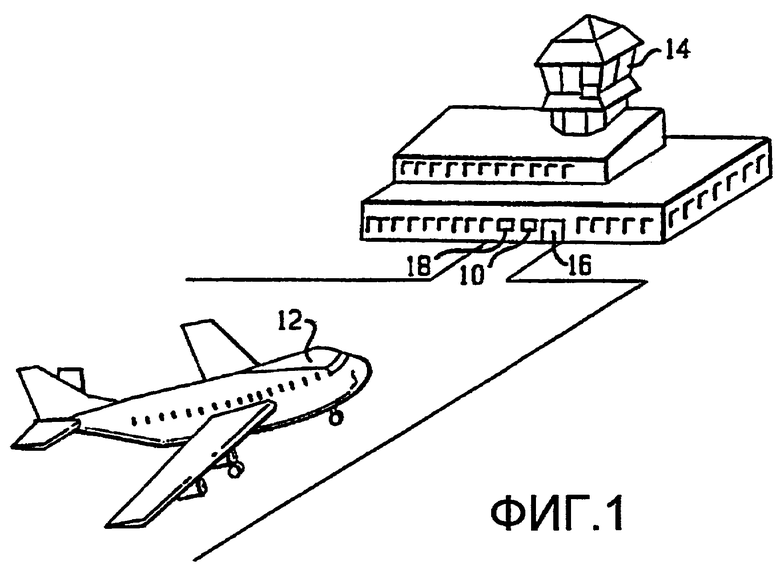
Vi/(Vi+Vo)>T,
где Vi - количество световых импульсов, отраженных из внутреннего объема;
Vo - количество световых импульсов, отраженных из внешнего объема;
Т - заданное пороговое значение.
Vi/(Vi+Vo)>T,
где Vi - количество световых импульсов, отраженных из внутреннего объема;
Vo - количество световых импульсов, отраженных из внешнего объема;
Т - заданное пороговое значение.
| Приспособление в пере для письма с целью увеличения на нем запаса чернил и уменьшения скорости их высыхания | 1917 |
|
SU96A1 |
| Домовый номерной фонарь, служащий одновременно для указания названия улицы и номера дома и для освещения прилежащего участка улицы | 1917 |
|
SU93A1 |
| СПОСОБ УПРАВЛЕНИЯ НАЗЕМНЫМ ДВИЖЕНИЕМ ВОЗДУШНЫХ СУДОВ И СРЕДСТВ МЕХАНИЗАЦИИ | 1994 |
|
RU2080033C1 |
| US 5675661 А, 07.10.1997 | |||
| DE 4301637 A1, 11.08.1994. | |||

