Изобретение относится к машиностроению и предназначено для использования в манипуляторах и роботах.
В патенте США 3481494, НКИ 414 -1 представлен манипулятор с одноосным шарнирным узлом.
Двухосный шарнир используется в манипуляторе, известном из патента США N 3314552. Двухосный шарнир организует передачу транзитных гибких тяг без взаимовлияния степеней свободы манипулятора. В известной конструкции двухосный шарнир передает большой крутящий момент за счет зубчатой передачи от шестерни, связанной с роликом приводной системы, к зубчатому сектору, связанному с ведомым звеном.
Недостатками известной конструкции являются большие габариты, т.к. зубчатый сектор ведомого звена выходит за габариты звена. Выступающий сектор ведомого звена усложняет установку защитного чехла. При уменьшении радиуса зубчатого сектора уменьшается передаточное отношение по моменту от ролика приводной системы к ведомому эвену и соответственно увеличиваются усилия на гибких тягах, что отрицательно сказывается на жесткости манипулятора. Зазоры в зубчатой передаче образуют угловой люфт шарнирного звена, а попадание посторонних предметов в зацепление зубчатой передачи уменьшает надежность.
За прототип принят манипулятор по авт.св. SU 1115898, МКИ B 25 J 3/02. Манипулятор состоит из приводов, приводной системы на гибких тягах и подвижных звеньев, соединенных шарнирными узлами.
Шарнирный узел манипулятора, принятый за прототип, содержит ролик приводной системы, который расположен на оси ведущего звена и жестко связан с водилом, соединяющим оси ведущего и ведомого звеньев. Взаимодействие ведущего и ведомого звеньев между собой осуществлено при помощи зубчатых венцов. Ролик ведущего звена взаимодействует через гибкую тягу с приводной системой манипулятора. Гибкая тяга состоит из двух ветвей, соединенных между собой элементами связи, выполненными в виде зубьев звездочки для цепной передачи или в виде шарика, скрепляющего концы ветвей тяги. Ветви гибкой тяги охватывают ролик по полупериметру и закреплены на нем путем, например, установки шарика в ложементе, выполненном на ролике. Передаточное отношение по углу от ролика к ведомому звену равно 2 (при условии, что передаточное отношение между зубчатыми венцами ведущего и ведомого звеньев равно 1). Соответственно передаточное отношение по моменту (без учета трения) между роликом и ведомым звеном равно 0,5.
Известный манипулятор имеет следующие недостатки. Малое передаточное отношение (0,5) приводит к возникновению в тросе большого усилия, для компенсации которого приводится увеличивать диаметр троса и (или) диаметр ролика. Из-за этого возрастают габариты и масса манипулятора. Кроме того, жесткость манипулятора в значительной степени зависит от жесткости троса, осей, на которых размещены транзитные ролики тросовой передачи, и нагрузок на них. Увеличение нагрузок на эти и другие элементы приводит к потере жесткости манипулятора в целом. Это большой недостаток для копирующего манипулятора. В случав электромеханического манипулятора возникает увеличение опасности автоколебательных процессов и усложнение системы управления. Кроме того, передача момента через водило, жестко связанное с приводным роликом, приводит к тому, что водило работает на изгиб и, следовательно, является силовым элементом, которое должно быть достаточно массивным, чтобы обеспечить требуемые прочность и жесткость. Это увеличивает размеры и массу самого водила и инжирного узла в целом.
Отмеченные недостатки не позволяют использовать манипулятор в условиях космической техники, в частности в условиях орбитального полета, из-за малого передаточного числа, малой жесткости, больших габаритов и массы.
Техническим результатом предлагаемого изобретения является устранение указанных недостатков, а именно увеличение передаточного отношения и жесткости шарнирного узла.
Достижение технического результата осуществляется за счет того, что шарнирный узел манипулятора содержит зубчатые венцы ведущего и ведомого звеньев, водила, установленные на осях ведущего и ведомого звеньев, ролик, который расположен на оси ведущего звена и взаимодействует через гибкую тягу с приводной системой манипулятора, а также элемент связи ветвей гибкой тяги.
В шарнирный узел введены дополнительные ролики, один из которых установлен на оси ведущего звена, а другой расположен на оси ведомого звена. При этом дополнительные ролики охвачены замкнутой кольцевой гибкой тягой, имеющей неподвижную связь с роликом и с ведомым звеном.
Сущность изобретении поясняется чертежами, где
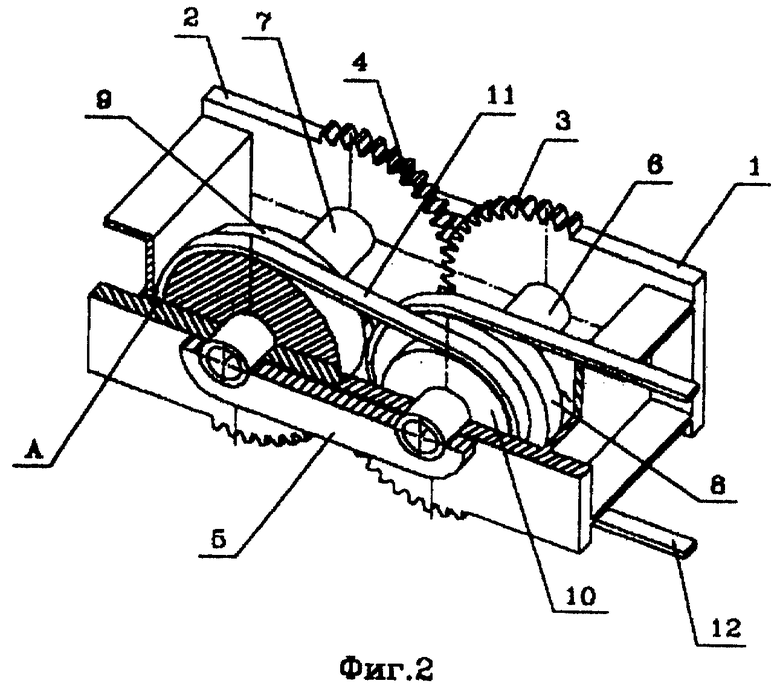
на фиг. 1 - шарнирный узел в сборе;
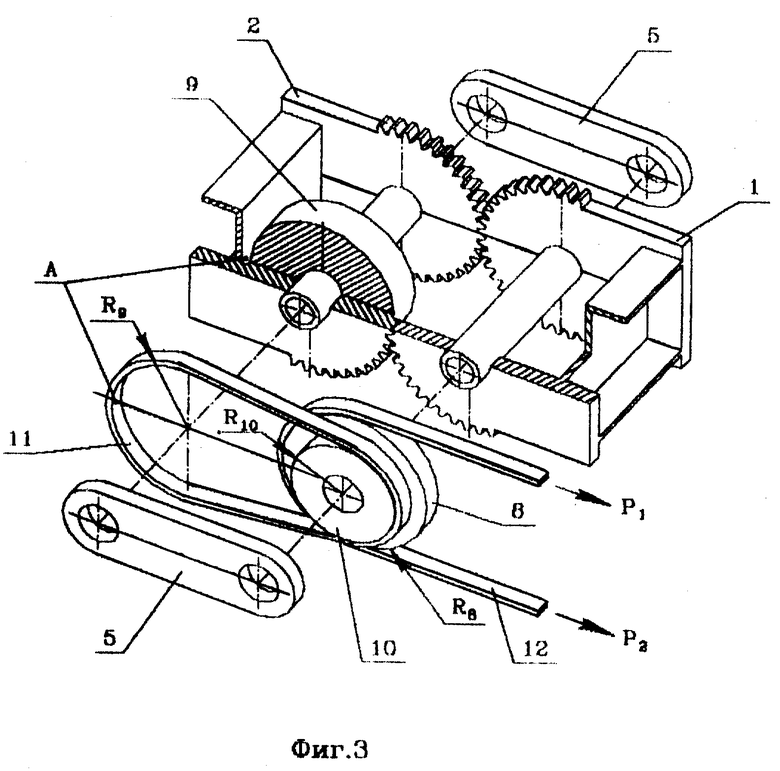
на фиг. 2, 3 - общий и "взорванный" виды шарнирного узла в аксонометрии.
Шарнирный узел манипулятора состоит из ведущего звена 1 и ведомого звена 2, взаимодействующих между собой при помощи зубчатых венцов 3 и 4. Звенья связаны между собой двумя водилами 5, расположенными на оси 6 ведущего звена и оси 7 ведомого звена. На оси 6 ведущего звена 1 расположен ролик 8 с возможностью свободного поворота.
В шарнирный узел ведены вновь дополнительные ролики 9 и 10. Ролик 9 установлен на оси 7 и выполнен зацело с ведомым эвеном 2. Ролик 10 расположен на оси 6 ведущего звена 1. Диаметр ролика 8 больше, чем диаметр ролика 10. За счет разности диаметров образуется ступенчатое соединение этих двух роликов. Дополнительные ролики 9 и 10 охвачены замкнутой кольцевой гибкой тягой 11, имеющей неподвижную связь с роликом 8 и с ведомым звеном 2. Обеспечение неподвижной связи может быть выполнено конструктивно по-разному. Например, кольцевая гибкая тяга 11 может быть выполнена в виде цепи, а ролик 10 - звездочкой, жестко закрепленной на ролике 8. Ролик 9 при этом может быть как звездочкой, жестко закрепленной на ведомом звене 2, так и цилиндрическим роликом. Во втором случае кольцевая тяга должна иметь фиксацию к ведомому звену в точке "A". Ролик 8 охвачен гибкой тягой 12, "сбегающие" с ролика 8 ветви гибкой тяги взаимодействуют с приводной системой манипулятора.
При работе шарнирного узла, когда движение шарнирному узлу передается от приводной системы манипулятора, разность сил натяжения (P1-P2) гибкой тяги 12 на ролике 8 передается на ролик 10. За счет неподвижной связи между кольцевой тягой 11, роликом 8 и ведомым звеном 2 разность сил натяжения передается на ролик 9, и на ведомом звене 2 создается крутящей момент.
Момент М на ведомом звене выражается формулой
M=(P1-P2)•R8•R9/R10,
где (P1 - P2) - разность сил натяжения ветви 12 тяги,
R8 - радиус ролика 8,
R9 - радиус ролика 9,
R10 - радиус ролика 10.
Из формулы видно, что момент на ведомом звене 2 зависит от радиуса ролика 8 и отношения радиусов дополнительных роликов 9 и 10. При увеличении диаметров рожков 8 и 9 и уменьшении диаметра ролика 10 происходит резкое увеличение передаточного отношения по моменту и уменьшение натяжения троса, а следовательно, увеличивается жесткость шарнирного узла и манипулятора в целом.
| название | год | авторы | номер документа |
|---|---|---|---|
| ШАРНИРНЫЙ УЗЕЛ МАНИПУЛЯТОРА | 1995 |
|
RU2156688C2 |
| ШАРНИРНЫЙ УЗЕЛ МАНИПУЛЯТОРА | 1995 |
|
RU2156689C2 |
| УСТРОЙСТВО ДЛЯ ПЕРЕДАЧИ ДВИЖЕНИЯ ЧЕРЕЗ ГЕРМЕТИЧНУЮ СТЕНКУ | 1995 |
|
RU2156904C2 |
| Многолучевая антенна | 2015 |
|
RU2626023C2 |
| Многолучевая антенна (варианты) | 2016 |
|
RU2623652C1 |
| Многолучевая антенна | 2016 |
|
RU2642512C1 |
| Манипулятор | 1983 |
|
SU1115898A1 |
| МОДУЛЬНАЯ КОНСТРУКЦИЯ КОСМИЧЕСКОГО АППАРАТА | 2007 |
|
RU2374148C2 |
| УСТРОЙСТВО БЕССТУПЕНЧАТОГО ВАРИАТОРА С ПРИВОДОМ ВЕДУЩЕГО ЗВЕНА ЧЕРЕЗ РЫЧАГИ И ИЗМЕНЯЕМУЮ ТОЧКУ ПРИЛОЖЕНИЯ ВНЕШНИХ СИЛ ВРАЩЕНИЯ | 2013 |
|
RU2578797C2 |
| Коробка двигательных агрегатов (КДА) турбореактивного двигателя, узел КДА турбореактивного двигателя (варианты) | 2016 |
|
RU2635227C1 |
Изобретение относится к машиностроению и предназначено для использования в манипуляторах и роботах. На ведущем и ведомом звеньях манипулятора расположены взаимодействующие между собой зубчатые венцы. На осях ведущего и ведомого звеньев установлены водила. На оси ведущего звена с возможностью свободного поворота размещен ролик, связанный с приводной системой манипулятора гибкой тягой. Кроме того, на осях ведущего м ведомого звеньев смонтированы дополнительные ролики, охватываемые замкнутой кольцевой гибкой тягой. Последняя неподвижно соединена с ведомым звеном и роликом, связанным с приводной системой манипулятора. В результате обеспечивается повышение жесткости шарнирного узла и увеличение передаточного отношения. 3 ил.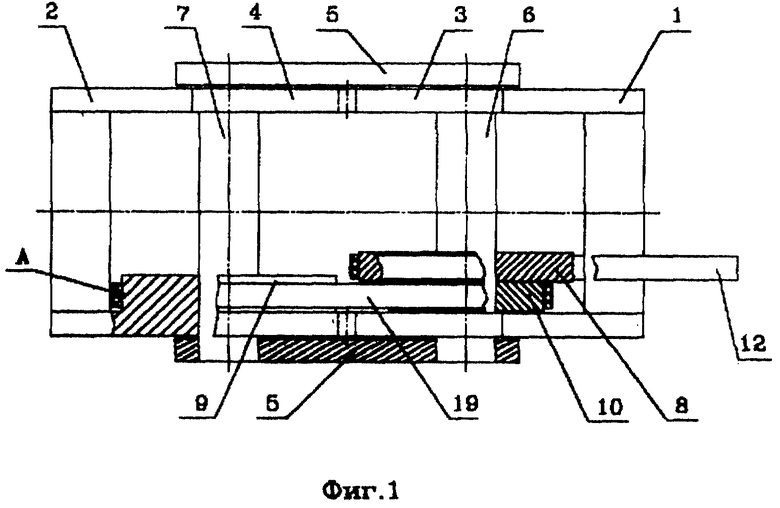
Шарнирный узел манипулятора, имеющего приводную систему и ведущее и ведомое звенья с осями, содержащее зубчатые венцы, выполненные на ведущем и ведомом звеньях и расположенные с возможностью взаимодействия, водила, установленные на осях ведущего и ведомого звеньев, ролик, размещенный на оси ведущего звена и связанный посредством гибкой тяги с приводной системой манипулятора, и элементы связи гибкой тяги, отличающийся тем, что он снабжен двумя дополнительными роликами и охватывающей их замкнутой кольцевой гибкой тягой, при этом один из дополнительных роликов установлен на оси ведомого звена, второй дополнительный ролик размещен на оси ведущего звена, ролик, связанный с приводной системой манипулятора, установлен на оси ведущего звена с возможностью свободного поворота, а замкнутая кольцевая гибкая тяга неподвижно соединена с ведомым звеном и роликом, связанным с приводной системой манипулятора.
| Манипулятор | 1983 |
|
SU1115898A1 |
| Манипуляционное устройство | 1983 |
|
SU1122500A1 |
| SU 1484676 А1, 07.06.1989 | |||
| US 5193963 А, 16.03.1993 | |||
| СПОСОБ КОНЦЕНТРИРОВАНИЯ ИНДИЯ ИЗ СУЛЬФАТНЫХ ЦИНКОВЫХ РАСТВОРОВ | 1993 |
|
RU2048563C1 |
| DE 3408933 А1, 20.09.1984 | |||
| US 4984951, 15.01.1991. | |||
