Изобретение относится к машиностроению и предназначено для использования в копирующих герметичных манипуляторах.
Известны различные конструкции манипуляторов, например пат. США N 3481494 НКИ 414-1, 3314552. Они не предназначены для передачи движения через герметичную стенку.
Обычно конструкции гермопроходок для манипуляторов, используемых, например, в электронной промышленности представляют собой вакуумно-герметичные специализированные манипуляторы с небольшим количеством степеней подвижности и малой зоной обслуживания. Ограничения, накладываемые конструкцией гермопроходки на такие манипуляторы, приводят к невозможности использования универсальных манипуляторов. Например, в атомной промышленности применяются универсальные манипуляторы, как правило, имеющие 7 и более степеней подвижности.
За прототип принят манипулятор по патенту США N 3481493, НКИ 414-7. Он содержит задающий и исполнительный органы и блок уплотнения, установленный с возможностью вращения в окне герметичной стенки. Корпуса задающего и исполнительного плечевых шарниров содержат, соответственно, приводную задающую и приводную исполнительную системы, преобразующие движение тросов во вращение валов, расположенных в блоке уплотнения. При этом корпуса жестко закреплены на концах блока уплотнения. Уплотнительные элементы расположены на валах, проходящих через блок уплотнения и на самом блоке. При этом диаметр уплотнения вращающегося блока достигает 150-200 мм.
Недостатком такой конструкции является то, что обеспечение герметизации вращающегося блока в случае уплотнения большого диаметра делает уплотнительный узел ненадежным при работе в условиях, требующих высокой степени герметичности, например в условиях вакуума и невесомости при работах на орбитальной космической станции. Стремление уменьшить диаметр уплотнения вступает в противоречие с требованиями иметь максимальное число степеней подвижности манипулятора, обеспечивающееся тем количеством валов, которым определяется число степеней подвижности, т.е. желаемое количество валов может не пройти через окно гермопроходки малого диаметра.
Существует возможность создания надежного вакуумно-герметичного уплотнения для диаметра большого размера. В силу конструктивных особенностей единственно возможным представляется магнитно-жидкостное уплотнение (МЖУ). Но создание МЖУ такого диаметра с необходимой надежностью требует сложной технологии и длительной отработки. При этом уплотнение будет иметь большие габариты, массу и потребует специальных мер против сильных магнитных полей.
Кроме того, в известной конструкции жесткая связь корпусов с блоком уплотнения исключает рассогласование по углу первой степени подвижности манипулятора. Теоретически можно спроектировать средства, введение которых в манипулятор позволило бы иметь рассогласование первой степени подвижности. Но практически эти дополнительные меры привели бы к резкому увеличению массы, габаритов и повысили бы сложность манипулятора.
Отмеченные недостатки практически исключают возможность использования описанного манипулятора в пилотируемых космических объектах, в частности для выполнения работ на внешней поверхности станции при помощи манипуляторов, управляемых из гермоотсека.
Техническим результатом данного изобретения является устранение указанных недостатков, а именно: создание устройства, позволяющего максимально упростить средства герметизации устройства для передачи движения с сохранением надежности, увеличить количество степеней рассогласования без увеличения массы и габаритов устройства.
Технический результат достигается тем, что устройство для передачи движения через герметичную стенку содержит корпуса приводной задающей и приводной исполнительной систем, взаимодействующие между собой через блок уплотнения окна герметичной стенки. В него вновь введен вал, пропущенный через блок уплотнения окна и связанный с корпусами при помощи элементов передачи вращения. Корпуса установлены в блоке уплотнения с возможностью вращения, а блок уплотнения неподвижно связан с гермостенкой. В результате передача управляющих моментов по всем степеням подвижности манипулятора осуществляется валами малого диаметра, для которых известно большое количество вакуумно-герметичных уплотнений, например сильфонных или магнитно-жидкостных. Связь между корпусами с помощью дополнительно введенного вала позволяет легко выполнить рассогласование корпусов на любой угол и увеличить зону обслуживания исполнительным органом манипулятора в условиях ограниченной зоны для задающего органа.
Сущность изобретения поясняется чертежами.
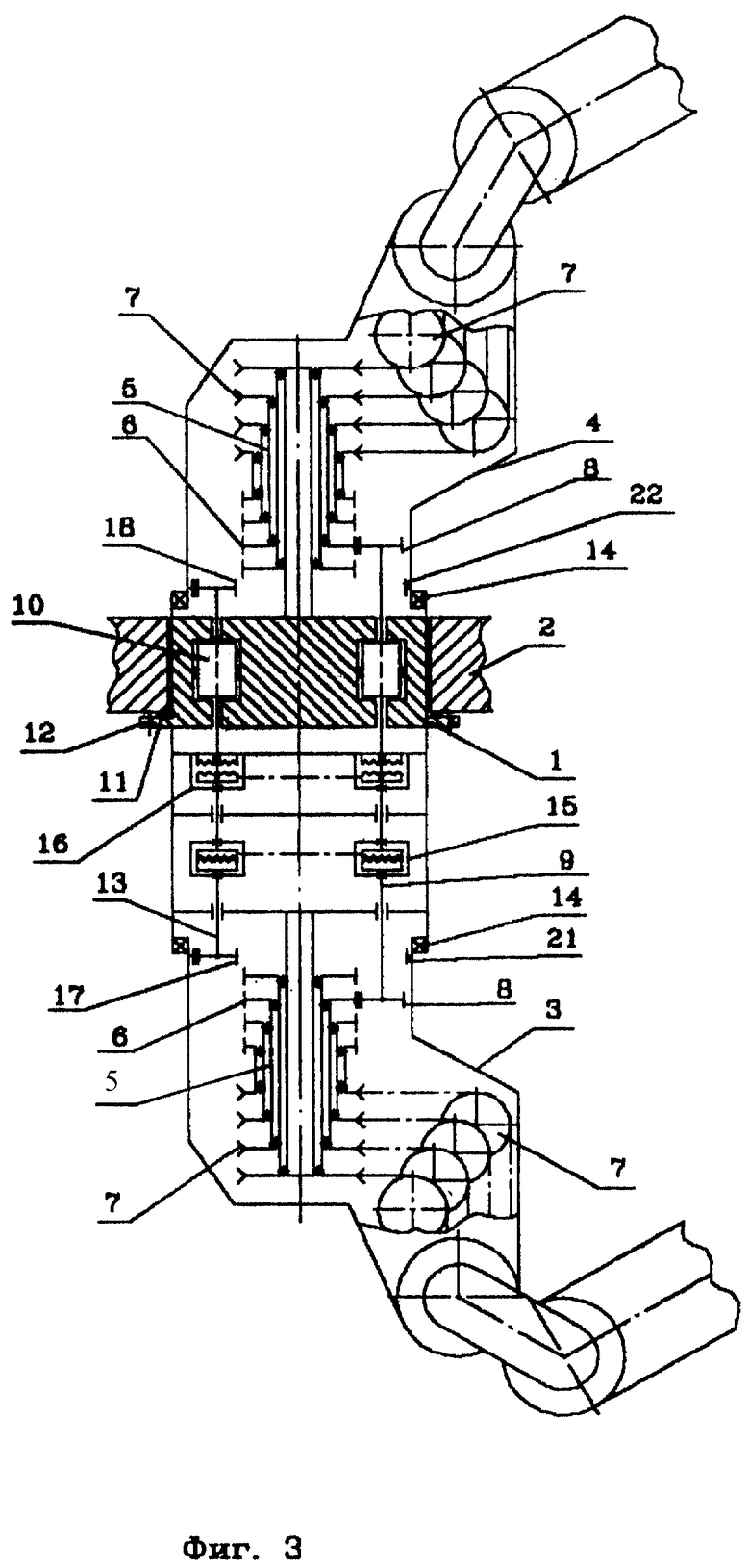
На фиг. 1 - изображено устройство передачи движения через герметичную стенку;
на фиг. 2, 3 - варианты конструктивного исполнения устройства.
Устройство для передачи движения через герметичную стенку состоит из блока 1 уплотнения окна герметичной стенки 2, корпуса 3 приводной задающей и корпуса 4 приводной исполнительной систем. Приводная задающая и приводная исполнительная системы состоят из коаксиальных валов 5 с зубчатыми колесами 6 и узлами передачи движения - роликами 7. Связь между зубчатыми колесами 6 осуществляется шестернями 8, расположенными на валах 9, проходящих через узлы уплотнения 10. Блок 1 установлен в окне гермостенки 2 с помощью стандартной уплотняющей прокладки 11 и вновь введенных элементов 12 неподвижной связи с гермостенкой (например, болтовое соединение). Вновь введенный вал 13 установлен в блоке 1 так же, как и остальные валы 9, при помощи узлов уплотнений 10 и связан с корпусами 3 и 4 элементами передачи вращения, например эвольвентным или шпоночным зацеплением. Корпуса 3, и 4 установлены на блоке уплотнения 1 через элементы вращения 14 (подшипники). На валах 9 и 13 расположены нормально замкнутые 15 и нормально разомкнутые 16 муфты, при этом муфты 16 имеют неподвижную связь с блоком уплотнения 1.
Варианты конструктивного исполнения элементов передачи вращения представлены на фиг. 2, 3. На фиг. 2 изображена передача вращения вала на корпус с помощью наружного зубчатого зацепления, состоящего из шестерен 17, 18 и зубчатых колес 19, 20. На фиг. 3 изображена передача вращения вала на корпус с помощью внутреннего зубчатого зацепления, состоящего из шестерен 17, 18 и зубчатых колес 21, 22.
Работа устройства происходит следующим образом.
При повороте корпуса 3 приводной задающей системы поворачивается жестко закрепленный на нем вал 13. Через муфту 15 и узел уплотнения 10 вал 13 передает момент на корпус 4. При этом зубчатые колеса 6 задающей и исполнительной приводных систем, связанные между собой валами 9 и шестернями 8, остаются неподвижными относительно собственных корпусов, то есть отсутствует влияние первой степени подвижности на остальные. Работа остальных степеней подвижности происходит обычным образом (зубчатые колеса 6, связанные с соответствующими роликами 7, взаимодействуют через шестерни 8 с валами 9), за исключением того, что угловая скорость валов 9 суммируется из угловой скорости от работы собственной степени подвижности и угловой скорости вала 13, умноженной на некоторую константу, зависящую от передаточного отношения: корпус 3(4) - вал 13 (фиг. 1), колесо 19(20) - шестерня 17(18) (фиг. 2), колесо 21(22) - шестерня 17(18) (фиг. 3).
Рассогласование манипулятора с предложенным устройством передачи движения происходит следующим образом: когда возникает необходимость рассогласования, то есть исполнительный орган необходимо привести в положение, при котором задающий орган выходит из зоны комфортной работы оператора или работа происходит в ограниченном объеме, оператор переключает муфты 16, замыкая все валы 9 и вал 13 на корпус блока уплотнения 1. При этом манипулятор оказывается "замороженным" в данном положении и исключается возможность произвольных движений исполнительного органа. После этого оператор переключает муфты 15, полностью освобождая задающий орган, и переводит его в любое удобное положение. Затем муфты 15 и 16 переключаются в обратном порядке и работа манипулятора продолжается.
При необходимости снижения нагрузки на вал 13 используются конструктивные варианты устройства, изображенные на фиг. 2 или 3. В предложенных вариантах при повороте корпуса 3 поворачивается жестко закрепленное на нем зубчатое колесо 19 (21) и через шестерню 17 заставляет вращаться нижнюю часть вала 13. Через муфту 15, уплотнительный элемент 10, шестерню 18 и зубчатое колесо 20 (22) вал 13 передает момент на корпус 4. При этом корпуса 3 и 4 поворачиваются в одном направлении и с одинаковой угловой скоростью.
Вариант, изображенный на фиг. 3, предпочтительнее, например, тогда, когда необходимо передавать большой крутящий момент на первой степени подвижности.
Анализируя признаки предложенного изобретения, автор утверждает следующее:
введенный вновь вал малого диаметра позволяет осуществить неподвижную заделку блока уплотнения в окне герметичной стенки, исключая тем самым проблему, связанную с герметизацией всего блока уплотнения по его внешнему диаметру. Неподвижная установка блока уплотнения исключает ограничения по размерам окна при его выполнении в герметичной стенке. Герметизация введенного вала осуществляется так же, как и валов остальных степеней подвижности, что позволяет использовать уплотнения высокой степени герметичности и применять унифицированные уплотнительные элементы. Кроме того, введенный вал существенно улучшил функциональные возможности манипулятора за счет рассогласований по всем степеням подвижности, в отличие от известных манипуляторов, где используется, как правило, рассогласование по 2-3 степеням из-за сложности систем рассогласования.
| название | год | авторы | номер документа |
|---|---|---|---|
| ШАРНИРНЫЙ УЗЕЛ МАНИПУЛЯТОРА | 1995 |
|
RU2156689C2 |
| ШАРНИРНЫЙ УЗЕЛ МАНИПУЛЯТОРА | 1995 |
|
RU2156687C2 |
| ШАРНИРНЫЙ УЗЕЛ МАНИПУЛЯТОРА | 1995 |
|
RU2156688C2 |
| Многолучевая антенна (варианты) | 2016 |
|
RU2623652C1 |
| Многолучевая антенна | 2016 |
|
RU2642512C1 |
| Многолучевая антенна | 2015 |
|
RU2626023C2 |
| МОДУЛЬНАЯ КОНСТРУКЦИЯ КОСМИЧЕСКОГО АППАРАТА | 2007 |
|
RU2374148C2 |
| РОТОРНАЯ ОБЪЁМНАЯ МАШИНА | 2018 |
|
RU2701306C1 |
| Манипулятор внутрикамерный | 2021 |
|
RU2785920C1 |
| Манипулятор модульного типа | 1990 |
|
SU1775289A1 |

Изобретение относится к машиностроению и может быть использовано в копирующих герметичных манипуляторах. Приводная задающая и исполнительная системы, имеющие корпуса, связаны между собой через блок уплотнения окна герметичной стенки, неподвижно соединенный со стенкой. Через блок уплотнения пропущен вал, связанный с корпусами приводных систем посредством элементов передачи вращения. Упомянутые корпуса подвижно соединены с блоком уплотнения. Элементы передачи вращения могут быть выполнены в виде зубчатых зацеплений. В результате обеспечивается возможность упрощения средства герметизации устройства с сохранением надежности, а также увеличения количества степеней рассогласования без увеличения массы и габаритов устройства. 1 з.п. ф-лы, 3 ил.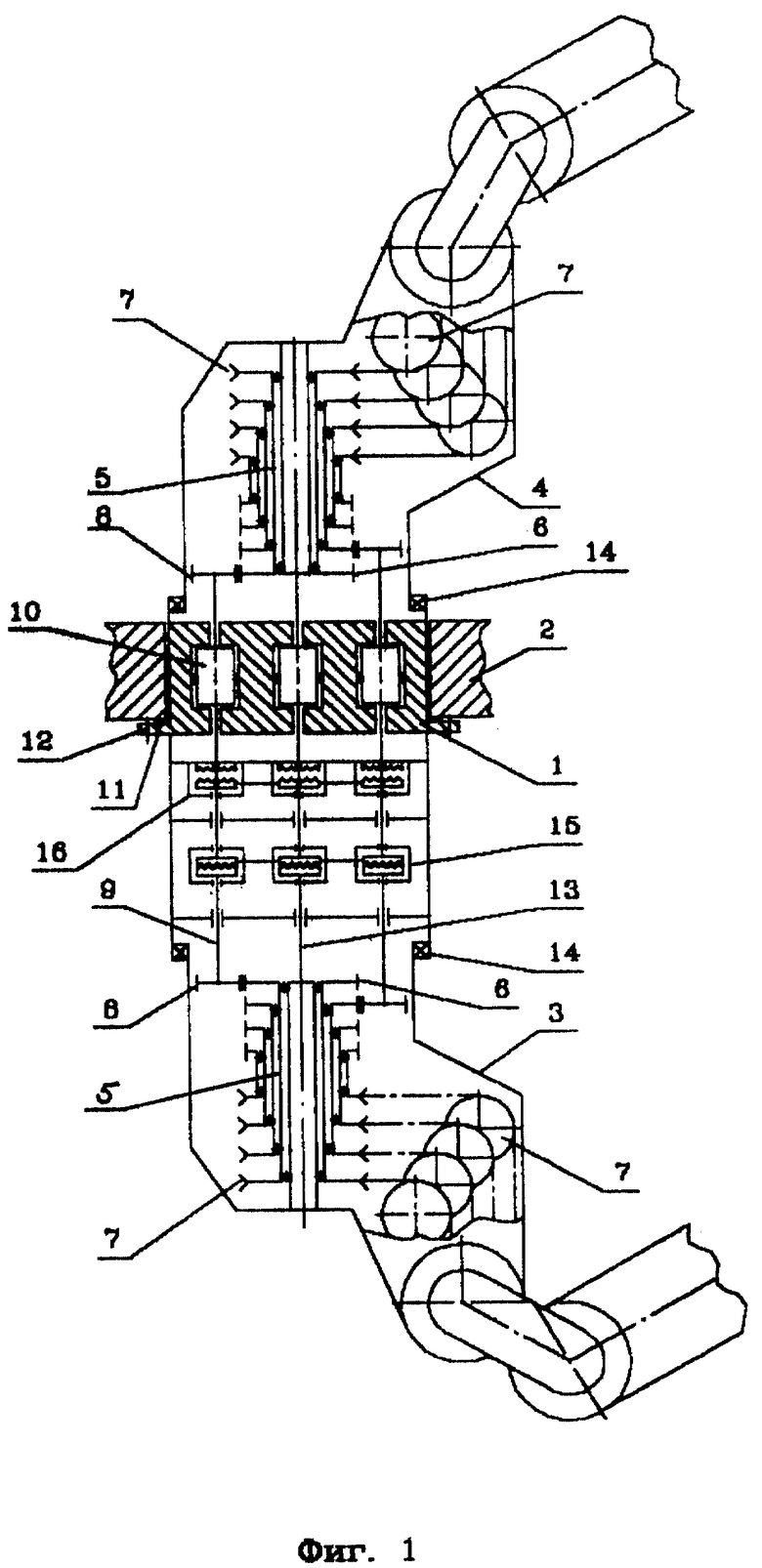
| US 3481493, 02.12.1969 | |||
| Герметичный манипулятор | 1979 |
|
SU1100080A1 |
| Манипулятор | 1988 |
|
SU1517253A1 |
| Копирующий манипулятор | 1990 |
|
SU1696297A1 |
| US 3481494, 02.12.1969 | |||
| US 5141378 A, 25.08.1992 | |||
| СПОСОБ ПОЛУЧЕНИЯ ДЕТАЛЕЙ ГИБКОЙ ИЗ ЗАГОТОВОК, ПОЛУЧЕННЫХ ЧИСТОВОЙ ВЫРУБКОЙ | 2009 |
|
RU2437735C2 |
