Й
00
CD СХ)
Изобретение относится к манипулятореробототехнике и может быть использовано в различных областях народного хозяйства для механизации и автоматизации транспортных, погрузо-разгрузочных, монтажных работ в нормальных и экстремальных средах.
Известен манипулятор, содержащий связанные с приводами n + k подвижных звеньев, выполненных каждое в виде цилиндрических корпусов с концентрически расположенными в них трубчатыми валами, на концах которых жестко закреплены зубчатые колеса, причем каждый цилиндрический корпус связан с тройником, в котором расположен дифференциальный механизм, включающий сателлитные конические зубчатые колеса передачи транзитных движений через звенья, пустотелые силовые водила, которые соединены перемычками с зубчатыми колесами, размещенными на торцах тройников, вращательные пары, и цилиндрические ведомые и ведущие зубчатые колеса, передаточные отношения которых равны передаточному отношению зубчатых венцов тройников предыдущего и последующего звеньев 1.
Недостатками известного манипулятора являются малая зона обслуживания, а также сложность перестройки манипулятора при частом изменении размеров зон обслуживания.
Цель изобретения - расширение технологических возможностей путем увеличения зоны обслуживания и снижения массы и энергоемкости конструкции.
Цель достигается тем, что в манипуляторе, содержащем связанные с приводами n-1-k подвижных звеньев, выполненных каждое в виде цилиндрических корпусов с концентрически расположенными в них трубчатыми валами, на концах которых жестко закреплены зубчатые колеса, причем каждый цилиндрический корпус связан с тройником, в котором расположен дифференциальный механизм, включающий сателлитные конические зубчатые колеса передачи транзитных движений через звенья, пустотелые силовые водила, которые соединены перемычками с зубчатыми колесами, размещенными на торцах тройников, вращательные пары и цилиндрические ведомые и ведущие зубчатые колеса, К-часть звеньев связана с одним приводом посредством тросо-роликовой передачи, п-часть звеньев кинематически связана с оставшимися приводами, при этом все ролики тросо-роликовой передачи предыдуплего звена и крайние ролики тросо-роликовой передачи последующего звена жестко установлены на силовых водилах дифференциальных механизмов, а центральные ролики тросо-роликовой передачи последующего звена жестко соединены трубчатыми валами с цилиндрическими
ведущими и ведомыми зубчатыми колесами пустотелых водил.
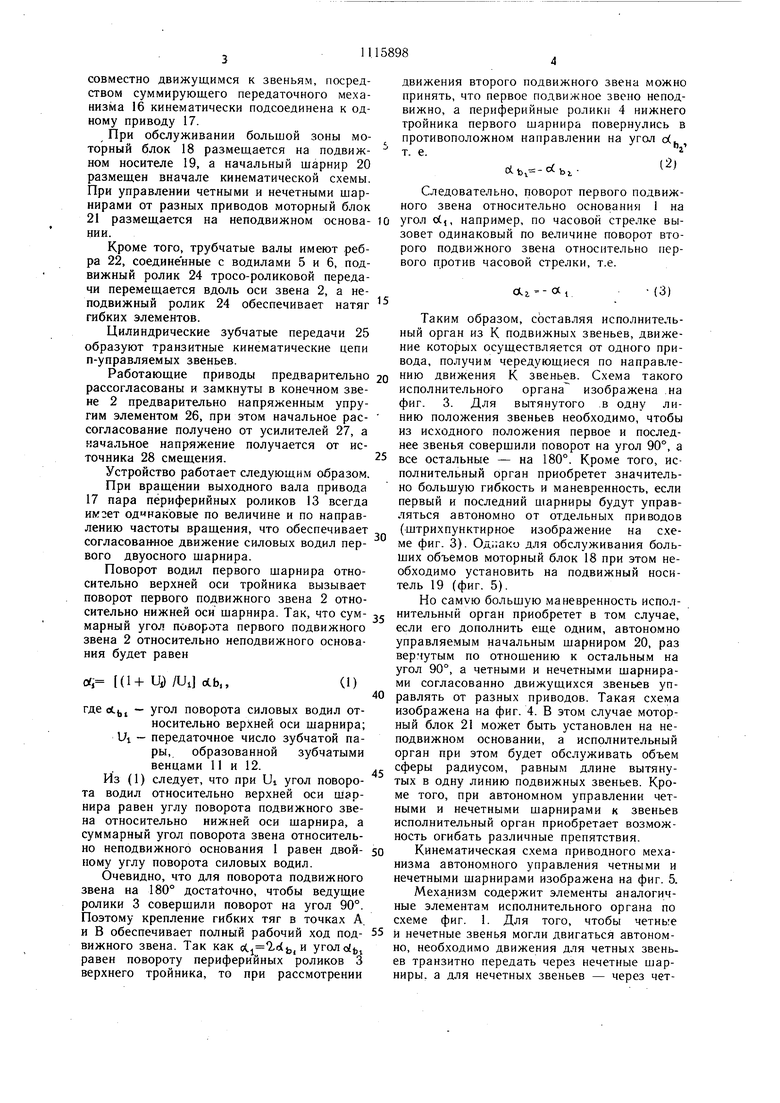
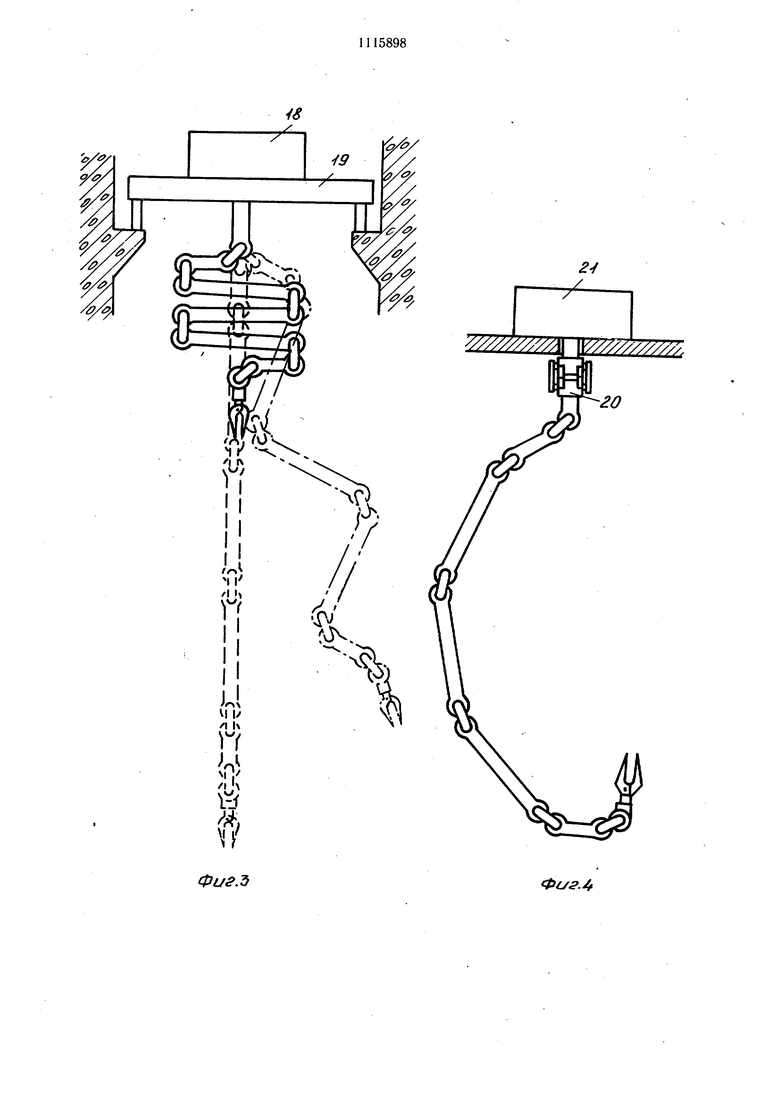
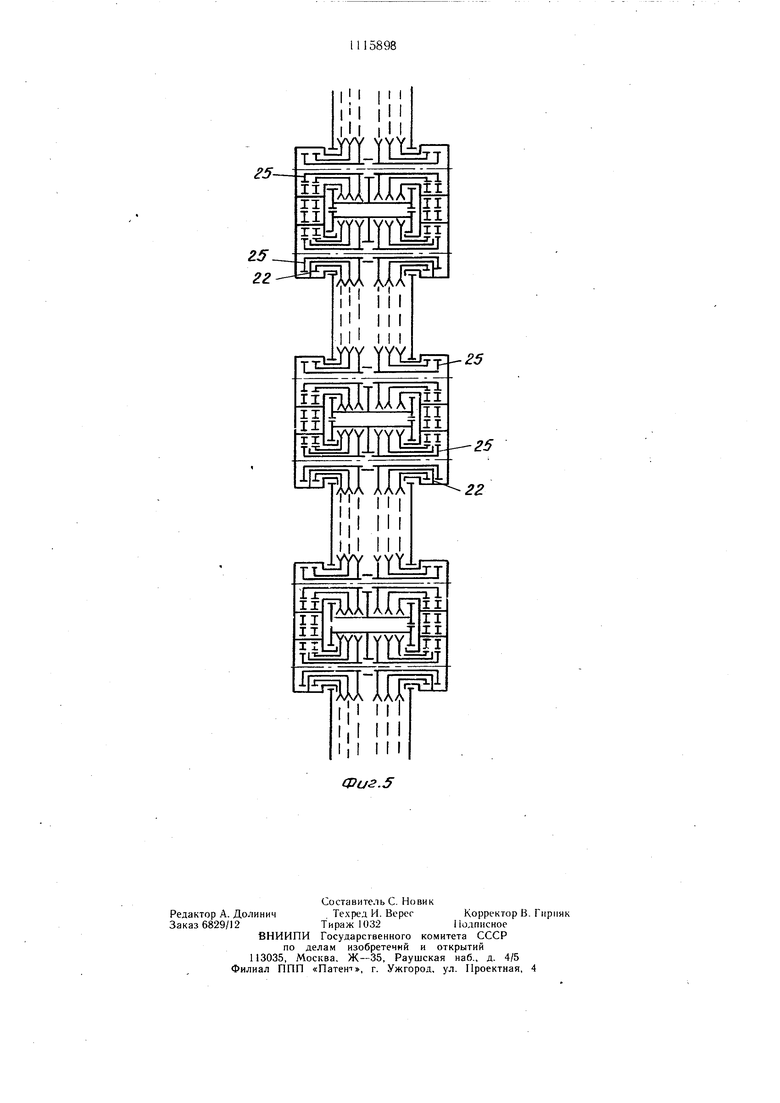
На фиг. 1 показана общая кинематическая схема манипулятора; на фиг. 2 - схема тросо-роликовой передачи; на фиг. 3 - схема управления k-звеньями от одного привода; на фиг. 4 - выполнение схемы управления четными и нечетными щарнирами от разных приводов с расположением моторного блока на основании; на фиг. 5 - схема приводного механизма автономного управления четными и нечетными щарнирами. Устройство содержит п +1 приводов, расположенных на неподвижном основании 1 и n + k подвижных звеньев 2, выполнбн5 ных в виде полых профилей прямоугольного сечения с цилиндрическими тройниками на концах. На осях тройников расположены п-1-2 ведущих и ведомых роликов (звездочек) 3 и 4, соединенных друг с другом гибкими механическими тягами, например,
0 проволочными тросами, стальными лентами, цепями Галя. В первых двух случаях гибкие тяги в точках А и В (фиг. 2) прикреплены к соответствующим ведущим и ведомым роликам 3 и 4; в последнем слу5 чае вместо роликов устанавливаются звездочки (может быть использована комбинация трос-цепь Галя или стальная лентацепь Галя).
Но торцам тройников справа и спева от продольной оси звена 2 расположены
пустотелые силовые водила 5 и 6, трубчатые отростки которых образуют с тройниками подвижных звеньев 2 вращательные пары, оси которых являются осями шарнира. На трубчатые отростки силовых водил жестко посажены периферийные ролики 3
i и 4. Центральные ролики с концентриче. ски расположенными трубчатыми валиками
жестко сочленены с ведущими и ведомыми
цилиндрическими зубчатыми колесами 7
и 8 транзитных кинематических цепей. Зуб- чатые колеса 7 и 8 размещены внутри силовых водил 5 и 6 по осям щарнира. Ведущие и ведомые зубчатые колеса 7 и 8 входят друг с другом в зубчатые зацепления либо непосредственно, либо через паразитные зубчатые пары 9 и 10.
5 На цилиндрической части тройников справа и слева от продольной оси звена закрепленызубчатые венцы 11 и 12, входящие друг с другом в зацепление.
На неподвижном основании 1 установлены входные ведущие ролики 13, соеди ненные гибкими механическими тягами с соответствующими роликами тройника первого двуосного шарнира. Крепление гибких тяг к роликам осуществляется аналогично. Ролики 13, передающие движения к автос номно движущим подвижным звеньям, кинематически сочленены через согласующие редукторы 14 с соответствующими исполнительными элементами 15. Пара периферийных роликов 13, подводящих движения к совместно движущимся к звеньям, посредством суммирующего передаточного механизма 16 кинематически подсоединена к одному приводу 17. При обслуживании большой зоны моторный блок 18 размещается на подвижном носителе 19, а начальный шарнир 20 размещен вначале кинематической схемы. При управлении четными и нечетными шарнирами от разных приводов моторный блок 21 размещается на неподвижном основаКроме того, трубчатые валы имеют ребра 22, соединенные с водилами 5 и 6, подвижный ролик 24 тросо-роликовой передачи перемещается вдоль оси звена 2, а неподвижный ролик 24 обеспечивает натяг гибких элементов. Цилиндрические зубчатые передачи 25 образуют транзитные кинематические цепи п-управляемых звеньев. Работающие приводы предварительно рассогласованы и замкнуты в конечном звене 2 предварительно напряженным упругим элементом 26, при этом начальное рассогласование получено от усилителей 27, а начальное напряжение получается от источника 28 смещения. Устройство работает следующим образом. При вращении выходного вала привода 17 пара периферийных роликов 13 всегда имзет одинаковые по величине и по направлению частоты вращения, что обеспечивает согласован-ное движение силовых водил первого двуосного шарнира. Поворот водил первого шарнира относительно верхней оси тройника вызывает поворот первого подвижного звена 2 относительно нижней оси шарнира. Так, что суммарный угол поворота первого подвижного звена 2 относительно неподвижного основания будет равен rfi (1+ otb,, где oCj,, - угол поворота силовых водил относительно верхней оси шарнира; Ui - передаточное число зубчатой пары, образованной зубчатыми венцами 11 и 12. Из (1) следует, что при Ui угол поворота водил относительно верхней оси Шарнира равен углу поворота подвижного звена относительно нижней оси шарнира, а суммарный угол поворота звена относительно неподвижного основания 1 равен двоиному углу поворота силовых водил. Очевидно, что для поворота подвижного звена на 180° дocтatoчнo, чтобы ведущие ролики 3 совершили поворот на угол 90°. Поэтому крепление гибких тяг в точках А, и В обеспечивает полный рабочий ход подвижного звена. Так как x.iiit,, и уголо), равен повороту периферийных роликов 3 верхнего тройника, то при рассмотрении движения второго подвижного звена можно принять, что первое подвижное звено неподвижно, а периферийные ролики 4 нижнего тройника первого шарнира повернулись в противоположном направлении на угол с(,, т. е. . -с(ь.. Следовательно, поворот первого подвижного звена относительно основания 1 на угол ot,, например, по часовой стрелке вызовет одинаковый по величине поворот второго подвижного звена относительно первого против часовой стрелки, т.е. сХг.-- ос Таким образом, составляя исполнительный орган из К подвижных звеньев, движение которых осуществляется от одного привода, получим чередующиеся по направлению движения К звеньев. Схема такого исполнительного органа изображена на фиг. 3. Для вытянутого в одну линию положения звеньев необходимо, чтобы из исходного положения первое и последнее звенья совершили поворот на угол 90°, а все остальные - на 180°. Кроме того, исполнительный орган приобретет значительно больщую гибкость и маневренность, если первый и последний шарниры будут управляться автономно от отдельных приводов (щтрихпунктирное изображение на схеме фиг. 3). Од;;ако для обслуживания больших объемов моторный блок 18 при этом необходимо установить на подвижный носитель 19 (фиг. 5). Но самУю больщую маневренность исполнительный орган приобретет в том случае, если его дополнить еще одним, автономно управляемым начальным шарниром 20, раз верчутым по отношению к остальным на угол 90°, а четными и нечетными шарнирами согласованно движущихся звеньев управлять от разных приводов. Такая схема изображена на фиг. 4. В этом случае моторный блок 21 может быть установлен на неподвижном основании, а исполнительный орган при этом будет обслуживать объем сферы радиусом, равным длине вытянутых в одну линию подвижных звеньев. Кроме того, при автономном управлении четными и нечетными шарнирами к звеньев исполнительный орган приобретает возможность огибать различные препятствия. Кинематическая схема приводного механизма автономного управления четными и нечетными шарнирами изображена на фиг. 5. Механизм содержит элементы аналогичные элементам исполнительного органа по схеме фиг. 1. Для того, чтобы четные И нечетные звенья могли двигаться автономно, необходимо движения для четных звеньев транзитно передать через нечетные шарниры, а для нечетных звеньев - через четные шарниры. Причем нижние трубчатые отростки силовых водил 5 и 6 высвобождаются от роликов 4, образуют с нижними тройниками лишь отдельные враш,ательные пары, ось которых является нижней осью шарнира.
Периферийные ролики 4, приводящие в движение следуюш,ее нодвижное звено 2, в данном случае трубчатыми валами жестко соединены с ведомыми цилиндрическими зубчатыми колесами первых транзитных кинетических цепей. Ролики 4, передающие движения подвижному звену 2, жестко носажены на трубчатые валы, которые ребрами 22 соединены с водилами 5 и 6. Этим достигается попеременная смена мест положения ведомых роликов 4, приводящих в движение четные и нечетные звенья.
Однако согласованное вращение роликов 3 и 4, расположенных на верхней и нижней осях одного подвижного звена (см. фиг. 2), вызывает разнополярные повороты чередующихся звеньев. Для того чтобы движущие одним приводом четные или нечетные звенья имели одинаковый знак поворота, необходимо обеспечить разнополярные повороты роликам 3 и 4. Такое движение может быть реализовано, если в схеме разводки гибкого элемента (фиг. 2) поменять местами ролики 3 и 23, не снимая с них гибкого элемента. Ролик 23 (перемещаемый вдоль оси звена) и ролик 24 (с неподвижной ось ) обеспечивают принудительный натяг гибких элементов и компенсацию вытяжки этих элементов во времени.
Цилиндрические зубчатые передачи 25 транзитных кинематических цепей, передающие движения автономно управляемым последующим подвижностям исполнительного органа, располагаются в силовых водилах справа и слева от ребер 22 (пунктир на схеме фиг. 5).
Для того чтобы при изгибе совместно движущихся подвижных звеньев сохранялось неизменным относительное положение ведомых роликов 4, передающих движения последующим автономно управляемым звеньям, необходимо обеспечить равенство по величине и по знаку передаточных чисел цилиндрических зубчатых пар, расположенных в пустотелых водилах, передаточному числу зубчатой пары, образованной ,зубчатыми венцами 11 и 12, т. е. выполнить условие
Ui и
(4) 50
lu
где передаточные числа зубчатых передач транзитных кинематических цепей.
При выполнении условия (4) поворот силовых водил 5 и 6 будет вызывать обкатку ведомых зубчатых колес 8 относительно неподвижных ведущих колес 7, обеспечивая
синфазность поворота нижнего тройника и ведомых роликов 4 транзитных движений относительно нижней оси шарнира. Шарнирно-рычажные конструкции манипуляторов характеризуются наличием больщих зазоров в сочленениях кинематических элементов.
В предлагаемом устройстве зазоры в кинематических сочленениях выбираются за счет предварительного принудительного натяга параллельных участков, замкнутых силовыми водилами кинематических цепей. Относительный поворот каждого последующего звена осуществляется двумя кинематическими ветвями, ведущие 3 и ведомые 4 ролики которых расположеные по обе стороны от продольной оси звена и замкнуты силовыми водилами 5 и 6. Водила всегда работают совместно и могут совершать поворот только в одинаковых направлениях. Поэтому, используя естественную упругость гибких механических тяг, можно произвести замыкание параллельных ветвей после их предварительного натяга. Этим будет обеспечен выбор зазоров во всех кинематических цепях, размещенных в подвижных звеньях исполнительного органа. Такую же предварительную натяжку можно осуществить и в параллельных участках кинематических ветвей, расположенных на неподвижном основании 1..Для этой цели необходимо перед замыканием двух параллельных ветвей общим зубчатым колесом суммирующего передаточного механизма 16 повернуть в одном направлении на некоторый угол оба входных зубчатых колеса этого механизма.
Аналогично осуществляется выбор зазоров в кинематических цепях автономно движущихся звеньев, если каждая их степень подвижности содержит две параллельных ветви, замкнутые одним приводом.
При иной схеме подвода движений к автономно управляемым звеньям, например, для случая, когда две параллельные ветви имеют индивидуальные приводы и в конечном звене работают на спаренные дифференциальные механизмы, обеспечивая подвижному звену 2 две степени подвижности (вращение относительно продольной оси и изгиб относительно оси шарнира), выбор зазоров осуществляется по принципу введения рассогласования в параллельно работающие приводы, замкнутые в конечном звене предварительно напряженным упругим элементом 26. Введение начального рас согласования осуществляется подачей на входы усилителей 27 этих приводов начального напряжения, которое снимается с выхода источника смещения 28. Экономический эффект может быть получен и за счет расщирения зоны обслуживания, снижения массы и энергоемкости конструкции.
Фи$,Ъ
Фс/.4
|i| |i
||l I |l I I I
25унджштош
25
II
щилрщ
I III I I III
таМ-ТШ;
4III№
25
2г
I III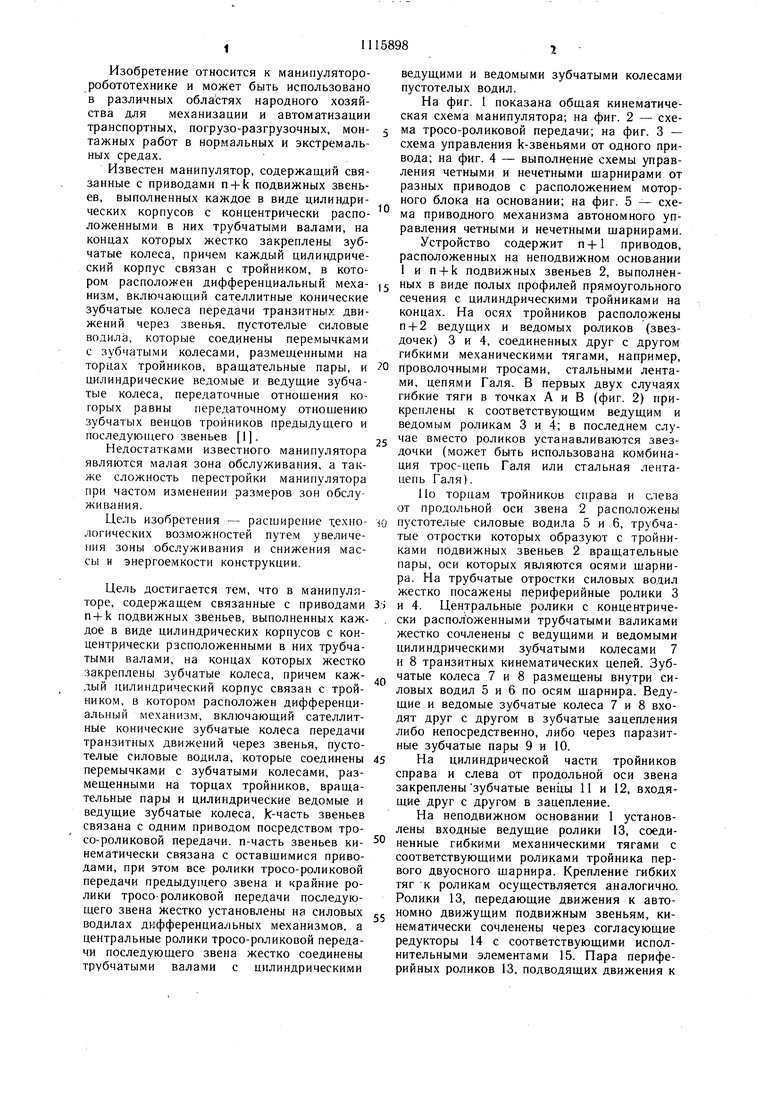
| название | год | авторы | номер документа |
|---|---|---|---|
| Рука манипулятора | 1982 |
|
SU1042989A1 |
| Манипулятор | 1983 |
|
SU1151453A1 |
| Механическая рука | 1983 |
|
SU1090545A1 |
| Рука манипулятора | 1984 |
|
SU1220781A1 |
| Манипуляционное устройство | 1983 |
|
SU1122500A1 |
| ШАРНИРНЫЙ УЗЕЛ МАНИПУЛЯТОРА | 1995 |
|
RU2156687C2 |
| Планетарная прецессионая передача | 1988 |
|
SU1753101A1 |
| ШАРНИРНЫЙ УЗЕЛ МАНИПУЛЯТОРА | 1995 |
|
RU2156688C2 |
| ШАРНИРНЫЙ УЗЕЛ МАНИПУЛЯТОРА | 1995 |
|
RU2156689C2 |
| Шарнир манипулятора | 1984 |
|
SU1189678A1 |
МАНИПУЛЯТОР, содержащий связанные с приводами n-i-k подвижных звеньев, выполненных каждое в виде цилиндрических корпусов с концентрически расположенными в них трубчатыми валами, на концах которых жестко закреплены зубчатые колеса, причем каждый цилиндрический корпус связан с тршником, в котором расположен дифференциальный механизм, включающий сателлитные конические зубчатые колеса передачи транзитных движений через звенья, пустотелые силовые водила, которые соединены перемычками с зубчатыми колесами, размещенными на торцах тройников, вращательные пары и цилиндрические ведомые и ведущие зубчатые колеса, передаточные отношения которых равны передаточному отношению зубчатых венцов тройников предыдущего и последующего звеньев, отличающийся тем, что, с целью расширения технологических возможностей путем расширения зоны обслуживания и снижения массы и энергоемкости конструкции, К часть звеньев связана с одним приводом посредством тросо-роликовой передачи, а п часть звеньев кинематически связана с оставшимися приводами, при этом все ролики тросо-роликовой передачи предыдущего звена и крайние ролики тросороликовой передачи последующего звена жестко установлены на силовых водилах е дифференциальных механизмов, а центральные ролики тросо-роликовой передачи последующего звена жестко соединены трубчатыми валами с цилиндрическими ведущими и ведомыми зубчатыми колесами пустотелых водил.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Авторское свидетельство СССР по заявке № 3451450/25-08, кл | |||
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
