Изобретение относится к машиностроению и предназначено для использования в манипуляторах и роботах.
Известны различные конструкции шарнирных узлов манипуляторов, основанные на одноосных и двухосных шарнирах.
Например, в конструкции манипулятора, известного из патента США 3481494, НКИ 414-1 представлен манипулятор, где используются одноосные шарнирные узлы.
В патенте США N 3314552 представлен манипулятор с двухосным шарниром, который позволяет передавать транзитом гибкие тяги без взаимовлияния степеней свободы манипулятора. В этой конструкции двухосный шарнир передает большой крутящий момент за счет зубчатый передачи от шестерни, связанной с роликом приводной системы, к зубчатому вектору, связанному с ведомым эвеном.
Недостатком такой конструкции является тo, что зубчатый сектор ведомого звена выходит за габариты звена, увеличивая габариты шарнирного звена и значительно усложняя установку защитного чехла. Уменьшение радиуса зубчатого сектора ведет к уменьшению передаточного отношения по моменту от ролика приводной системы к ведомому эвену и, соответственно, к увеличению усилий на гибких тягах, что отрицательно сказывается на жесткости манипулятора и увеличивает его массу. Зазоры в зубчатой передаче образуют угловой люфт шарнирного звена, а попадание посторонних пролетов в зацепление зубчатой передачи уменьшает надежность.
За прототип принят манипулятор по а.с. SU 1115898 МКИ B 25 J 3/02.
Манипулятор состоит из приводов, приводной системы на гибких тягах и подвижных звеньев, соединенных шарнирными узлами. Шарнирный узел манипулятора, принятый за прототип, устроен следующим образом. Ролик приводной системы расположен на оси ведущего эвена и жестко связан с водилом, которое установлено на осях ведущего и ведомого звеньев и соединяет их. Ведущее и ведомое звенья взаимодействуют между собой при помощи зубчатых венцов. Ролик ведущего звена взаимодействует через гибкую тягу с приводной системой манипулятора. Гибкая тяга состоит из двух ветвей, соединенных между собой элементом связи (выполнение элемента связи может быть различно, например, в виде стандартной заделки, когда скрепленные концы ветвей тяги спрятаны в шарик, или в виде зубьев звездочки для цепной передачи). Ветви гибкой тяги охватывают ролик по полупериметру и закреплены на нем путем, например, установки шарика в ложементе, выполненном на ролике. Передаточное отношение по углу от ролика к ведомому звену равно 2 (при условии, что передаточное отношение между зубчатыми венцами ведущего и ведомого звеньев равно 1). Соответственно передаточное отношение по моменту (без учета трения) между роликом и ведомым звеном равно 0,5.
К недостаткам известного манипулятора относится то, что малое передаточное отношение (0,5) приводит к возникновению в тросе большого усилия, для компенсации которого приходится увеличивать диаметр троса и (или) диаметр ролика. Из-за этого, а также из-за вторичных проблем (увеличение размеров заделок тросов и натяжных устройств и др.) интенсивно возрастают габариты и масса манипулятора. Кроме того, жесткость манипулятора в значительной степени зависит от жесткости троса, осей, на которых размещены транзитные ролики тросовой передачи нагрузок на них. Увеличение нагрузок на эти и другие элементы приводит к повышенной упругости манипулятора в целом. Это большой недостаток для копирующего манипулятора. В стучав электромеханического манипулятора возникает увеличение опасности автоколебательных процессов и усложнение системы управления. Передача момента через водило приводит к тому, что водило работает на изгиб, что делает его силовым элементом.
Положительной стороной прототипа является отсутствие люфтов в шарнирных узлах.
Указанные недостатки приводят к ограниченным возможностям манипулятора. Например, в условиях космической техники, в частности в условиях орбитального полета, использовать манипулятор данной конструкции нецелесообразно из-за малой жесткости, больших габаритов и массы.
Техническим результатом предлагаемого изобретения является устранение указанных недостатков, а именно: увеличение передаточного отношения и увеличение жесткости шарнирного узла.
Достижение технического результата осуществляется за счет того, что шарнирный узел манипулятора содержит зубчатые венцы ведущего и ведомого звеньев, водила, установленные на осях ведущего и ведомого звеньев, ролик, который расположен на оси ведущего звена и взаимодействует через гибкую тягу с приводной системой манипулятора, а также элементы связи ветвей гибкой тяги.
В шарнирный узел введен дополнительный ролик, установленный на оси ведомого звена и охваченный ветвями гибкой тяги. Ролик ведущего эвена охвачен, по крайней мере, один раз по всему периметру каждой ветвью гибкой тяги, а элементы связи ветвей гибкой тяги неподвижно закреплены на ведомом звене.
Сущность изобретений поясняется чертежами.
Фиг. 1 - шарнирный узел в сборе.
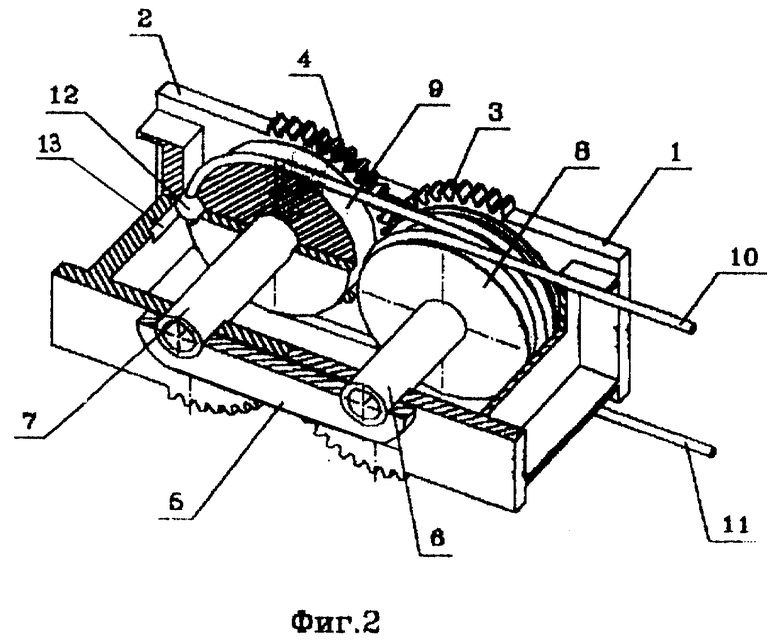
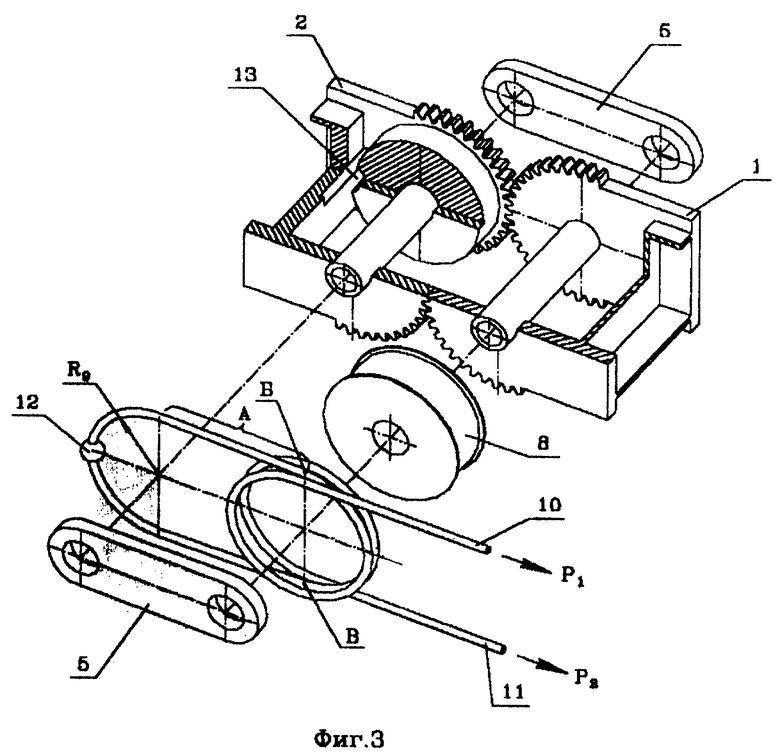
Фиг. 2, 3 - общий и "взорванный" вид шарнирного узла в аксонометрии.
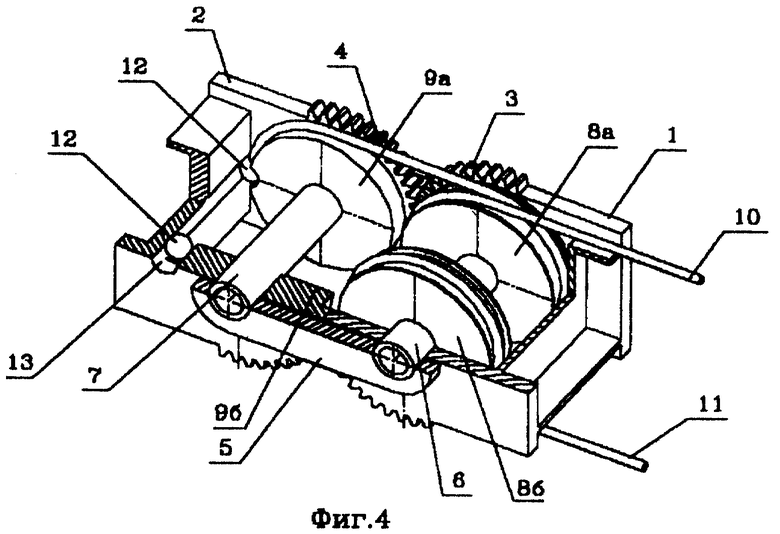
Фиг. 4 - вариант конструктивного исполнения роликов по п.2 формулы изобретения.
Шарнирный узел манипулятора состоит из ведущего звена 1 и ведомого звена 2, взаимодействующих между собой при помощи зубчатых венцов 3 и 4. Звенья связаны между собой двумя водилами 5, расположенными на оси 6 ведущего звена и оси 7 ведомого звена. На оси 6 ведущего звена расположен ролик 8 с возможностью свободного поворота.
Введенный вновь дополнительный ролик 9 установлен на оси 7 и выполнен зацело с ведомым звеном 2. Гибкая тяга представляет собой трос, состоящий из двух ветвей 10 и 11. Соединение ветвей 10 и 11 между собой осуществлено элементами связи, выполненными, например, в виде шарика 12, который неподвижно закреплен на ведомом звене и заделан в ложементах 13, выполненных на ведомом звене 2 и на неподвижно связанном с ним дополнительном ролике 9. Ролик 8 охвачен каждой ветвью 10 и 11 гибкой тяги по всему периметру, совершая, по крайней мере один раз полный оборот вокруг ролика. Обогнув ролик 8, ветви гибкой тяги совершает охват дополнительного ролика 9, взаимодействуя с ним по полупериметру. При этом, как указывалось выше, шарик 12, соединяющий ветви 10 и 11, заведен в ложемент 13, на дополнительном ролике 9. "Сбегающие" с ролика 8 ветви 10 и 11 гибкой тяги взаимодействуют с приводной системой манипулятора.
На фиг. 4 изображено возможное конструктивное исполнение ролика 8 ведущего звена и дополнительного ролика 9. Ролик 8 ведущего звена 1 выполнен из двух раздвинутых вдоль своей оси 6 дисков: 8а и 8б (геометрически диски 8а и 8б как бы представляют собой ролик 8, рассеченный пополам плоскостью, перпендикулярной оси). Толщина дисков 8а и 8б составляет, приблизительно, 1/2 от толщины ролика 8. Аналогично выполнен и дополнительный ролик 9, также состоящий из двух раздвинутых вдоль своей оси 7 дисков: 9а и 9б. Диски 8а-9а охвачены ветвью 10 гибкой тяги, а диски 8б-9б - ветвью 11. Причем диски 8а и 8б охвачены ветвями тяг по всему периметру, по крайней мере, один раз, а диски 9а и 9б охватываются ветвями тяги по четверти окружности. Соединение концов ветвей 10 и 11 тяги на ведомом звене осуществляется, как описано выше, т. е. шарики 12 ветвей тяг неподвижно установлены в ложементах 13 ведомого звена 2 и роликов 9а и 9б. Раздвижка дисков на соответствующих осях определяет компоновку транзитных роликов манипулятора, которые, в этом случае, могут размещаться между дисками. Такое исполнение роликов 8 и дополнительных роликов 9 в шарнирных узлах манипулятора позволяет получить более компактную конструкцию манипулятора.
При работе шарнирного узла, когда движение шарнирному узлу передается от приводной системы манипулятора, разность сил натяжения ветвей 10 и 11 передается через участки "А" троса и ролик 9 на элементы связи ветвей гибкой тяги, т. е. на шарик 12 в ложементе 13. На ведомом звене 2 создается крутящий момент. Обороты ветвей гибкой тяги вокруг ролика 8 при повороте шарнира на любой угол обеспечивают постоянное прилегание тяги к ролику 8 в точках "Б" и "В".
Работа шарнирного узла, конструктивно исполненного по фиг. 4, аналогична действиям конструкции, изображенной на фиг. 1-3. Разность сил натяжения ветвей 10 и 11 передается через диски 9а и 9б на шарики 12 в ложементах 13. На ведомом звене 2 создается крутящий момент. Обороты ветвей гибкой тяги вокруг дисков 8а и 8б при повороте шарнира обеспечивают постоянное прилегание тяги к дискам 8а и 8б.
Момент М на ведомом звене выражается формулой:
M=(P10-P11)•R9,
где P10 - сила натяжения ветви 10 тяги,
P11 - сила натяжения ветви 11 тяги,
R9 - радиус ролика 9.
Из формулы видно, что момент на ведомом эвене зависит только от радиуса ролика 9. Т.е. во время работы ролик 9 приобретает функции ведущего ролика, что достигается заявленным расположением гибких связей на роликах. Если сравнить конструкцию шарнирного узла по прототипу с предложенным решением, то очевидно, что при одинаковом радиусе ведущих роликов, момент на ведомом звене в манипуляторе по прототипу меньше в два раза, чем в данном решении.
При увеличении диаметра ролика 9 и соответственном уменьшении диаметра ролика 8 натяжение троса также уменьшается, а следовательно увеличивается жесткость шарнирного узла и манипулятора в целом.
Конструкция предложенного шарнирного узла позволяет исключить воздействие изгибающих моментов на водило, которое работает в данном шарнирном узле только на сжатие от сил натяжения троса и, следовательно, не является силовым элементом. Т.к. передача момента осуществляется парой трос - водило, зубчатые венцы не участвуют при передаче нагрузки, следовательно, исполнение может быть с минимальными габаритами. В результате происходит уменьшение габаритов и массы шарнирного узла и всего манипулятора.
Таким образом, предложенная конструкция шарнирного узла манипулятора позволяет увеличить передаточное отношение по крутящему моменту, что увеличивает жесткость конструкции за счет уменьшения натяжения троса. Увеличение жесткости происходит без увеличения габаритов манипулятора и его массы. Предложенная конструкция позволяет получить рациональную схему компоновки элементов манипулятора.
| название | год | авторы | номер документа |
|---|---|---|---|
| ШАРНИРНЫЙ УЗЕЛ МАНИПУЛЯТОРА | 1995 |
|
RU2156689C2 |
| ШАРНИРНЫЙ УЗЕЛ МАНИПУЛЯТОРА | 1995 |
|
RU2156687C2 |
| УСТРОЙСТВО ДЛЯ ПЕРЕДАЧИ ДВИЖЕНИЯ ЧЕРЕЗ ГЕРМЕТИЧНУЮ СТЕНКУ | 1995 |
|
RU2156904C2 |
| ПРИВОД ВЕЛОСИПЕДА (ВАРИАНТЫ) | 2013 |
|
RU2539260C1 |
| Манипулятор | 1983 |
|
SU1115898A1 |
| Многолучевая антенна (варианты) | 2016 |
|
RU2623652C1 |
| Многолучевая антенна | 2016 |
|
RU2642512C1 |
| Многолучевая антенна | 2015 |
|
RU2626023C2 |
| МОДУЛЬНАЯ КОНСТРУКЦИЯ КОСМИЧЕСКОГО АППАРАТА | 2007 |
|
RU2374148C2 |
| АППАРАТ ДЛЯ ПРИГОТОВЛЕНИЯ СТЕРИЛЬНЫХ МАЗЕЙ | 2000 |
|
RU2183952C2 |
Изобретение относится к области машиностроения и может быть использовано в манипуляторах и роботах. На ведущем и ведомых звеньях манипулятора смонтированы зубчатые венцы, взаимодействующие между собой. На осях ведущего и ведомого звеньев установлены водила. На оси ведущего звена с возможностью поворота расположен ролик, связанный гибкой тягой с приводной системой манипулятора. Упомянутый ролик охвачен, по меньшей мере, один раз по периметру каждой ветвью гибкой тяги. На оси ведомого звена установлен дополнительный ролик, охваченный ветвями гибкой тяги. С ведомым звеном неподвижно связаны элементы связи ветвей гибкой тяги. Каждый ролик может быть выполнен в виде двух раздвинутых вдоль оси дисков. Каждый диск ролика ведущего звена при этом охвачен, по меньшей мере, один раз по периметру ветвью гибкой тяги. Каждый диск дополнительного ролика также охвачен ветвью гибкой тяги. В результате обеспечивается повышение жесткости шарнирного узла и увеличение его передаточного отношения. 1 з.п.ф-лы, 4 ил.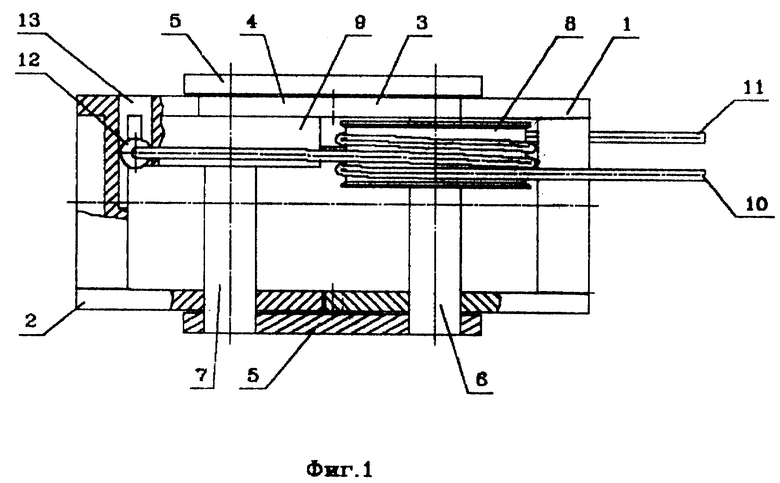
| Манипулятор | 1983 |
|
SU1115898A1 |
| Манипуляционное устройство | 1983 |
|
SU1122500A1 |
| SU 1484676 А1, 07.06.1989 | |||
| Манипулятор | 1986 |
|
SU1457318A1 |
| Рука манипулятора | 1984 |
|
SU1220781A1 |
| US 5193963 А, 16.03.1993 | |||
| СПОСОБ КОНЦЕНТРИРОВАНИЯ ИНДИЯ ИЗ СУЛЬФАТНЫХ ЦИНКОВЫХ РАСТВОРОВ | 1993 |
|
RU2048563C1 |
| DE 3408933 А1, 20.09.1984 | |||
| US 4984951, 15.01.1991. | |||
