Изобретение относится к машиностроению и предназначено для использования в манипуляторах и роботах.
Известны различные конструкции шарнирных узлов манипуляторов, основанные на одноосных и двухосных шарнирах.
На применении двухосного шарнира основан манипулятор, известный из патента США N 3314552. Двухосный шарнир позволяет осуществить передачу транзитных гибких тяг без взаимовлияния степеней свободы манипулятора. Большой крутящий момент в шарнирном звене передается за счет зубчатой передачи от шестерни, взаимодействующей с роликом приводной системы, к зубчатому сектору, связанному с ведомым звеном.
Известная конструкция имеет следующие недостатки: зубчатый сектор ведомого звена выступает за наружный обвод звена, что усложняет установку защитного чехла и увеличивает габариты шарнирного звена. Стремление уменьшить габариты приводит к необходимости уменьшения радиуса зубчатого сектора. Но в этом случае уменьшается передаточное отношение по моменту от ролика приводной системы к ведомому звену и, соответственно, происходит увеличение усилий на гибких тягах. Это отрицательно сказывается на жесткости манипулятора и увеличивает его массу.
За прототип принят манипулятор по а.с. SU 1115890, МКИ B 25 J 3/02. Манипулятор состоит из приводов, приводной системы на гибких тягах и подвижных звеньев, соединенных шарнирными узлами. Шарнирный узел манипулятора, принятого за прототип, содержит ролик приводной системы, расположенный на оси ведущего звена и жестко связанный с водилом, соединяющим оси ведущего и ведомого звеньев. Ведущее и ведомое звенья взаимодействуют между собой при помощи зубчатых венцов. С приводной системой манипулятора ролик ведущего звена взаимодействует через гибкую тягу, которая состоит из двух ветвей, соединенных между собой элементами связи. Элементами связи могут быть различные средства, например стандартная заделка, когда скрепленные концы ветвей тяги спрятаны в шарик, или зубья звездочки цепной передачи. Ветви гибкой тяги охватывают ролик по полупериметру и закреплены на нем, например, путем установки шарика в ложементе, выполненном на ролике. Передаточное отношение в рассматриваемом манипуляторе по углу от ролика к ведомому звену равно 2 (при условии, что передаточное отношение между зубчатыми венцами ведущего и ведомого звеньев равно 1). Соответственно передаточное отношение по моменту (без учета трения) между роликом и ведомым звеном равно 0,5.
К недостаткам известного манипулятора относится то, что малое передаточное отношение (0,5) приводит к возникновению в тросе большого усилия, для компенсации которого приходится увеличивать диаметр троса и (или) диаметр ролика. Из-за этого, а также из-за вторичных проблем (увеличение размеров заделок тросов и натяжных устройств и др.) интенсивно возрастают габариты и масса манипулятора. Кроме того, жесткость манипулятора в значительной степени зависит от жесткости троса, осей, на которых размещены транзитные ролики тросовой передачи, и нагрузок на них. Увеличение нагрузок на эти и другие элементы приводит к потери жесткости (повышенной упругости) манипулятора в целом. Малая жесткость, например, для копирующего манипулятора является большим недостатком - она приводит к недостаточной точности на исполнительном звене и к повышенной утомляемости оператора. В случае манипулятора электромеханического типа при малой жесткости возникает увеличение опасности автоколебательных процессов и усложнение системы управления. Кроме того, передача момента через водило, жестко связанное с приводным роликом, приводит к тому, что водило работает на изгиб и, следовательно, является силовым элементом, который выполняется достаточно массивным, чтобы обеспечить требуемые прочность и жесткость. Это увеличивает размеры и массу самого водила и шарнирного узла в целом. Манипулятор данной конструкции нецелесообразно использовать в космической технике, в частности, в условиях орбитального полета, т.к. он имеет малую жесткость, небольшое передаточное отношение и большие габариты и массу.
Техническим результатом предлагаемого изобретения является устранение указанных недостатков, а именно: увеличение передаточного отношения без увеличения диаметра тросов и роликов, увеличение жесткости шарнирного узла при достаточной величине нагрузок на передающие элементы.
Достижение технического результата осуществляется за счет того, что шарнирный узел манипулятора содержит зубчатые венцы ведущего и ведомого звеньев, водила, установленные на осях ведущего и ведомого звеньев, ролик, который расположен на оси ведущего звена и взаимодействует через гибкую тягу с приводной системой манипулятора, а также элементы связи ветвей гибкой тяги.
В шарнирный узел введен дополнительный ролик, установленный на оси ведомого звена и охваченный ветвями гибкой тяги, и направляющий ролик, установленный на дополнительной оси, расположенной на ведущем звене. Ролик ведущего звена и направляющий ролик охвачены перекрещивающимися ветвями гибкой тяги по секторам, обращенным друг к другу, а элементы связи ветвей гибкой тяги неподвижно закреплены на ведомом звене.
Сущность изобретений поясняется чертежами.
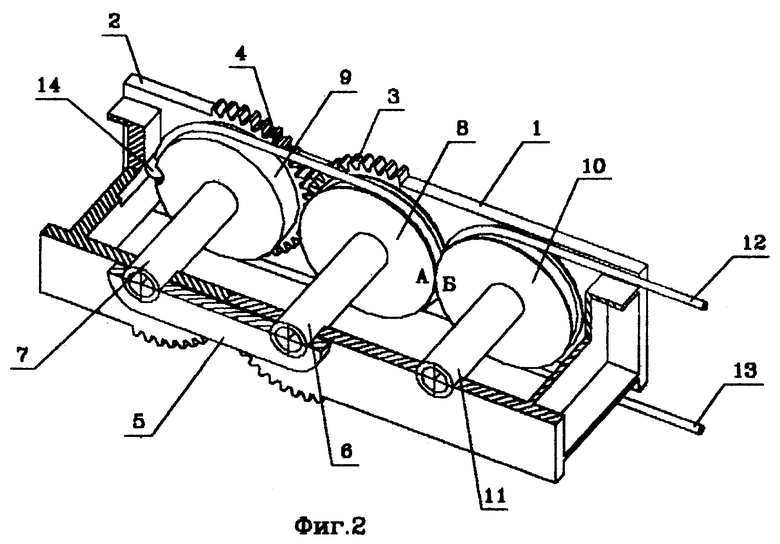
Фиг. 1 - шарнирный узел в сборе.
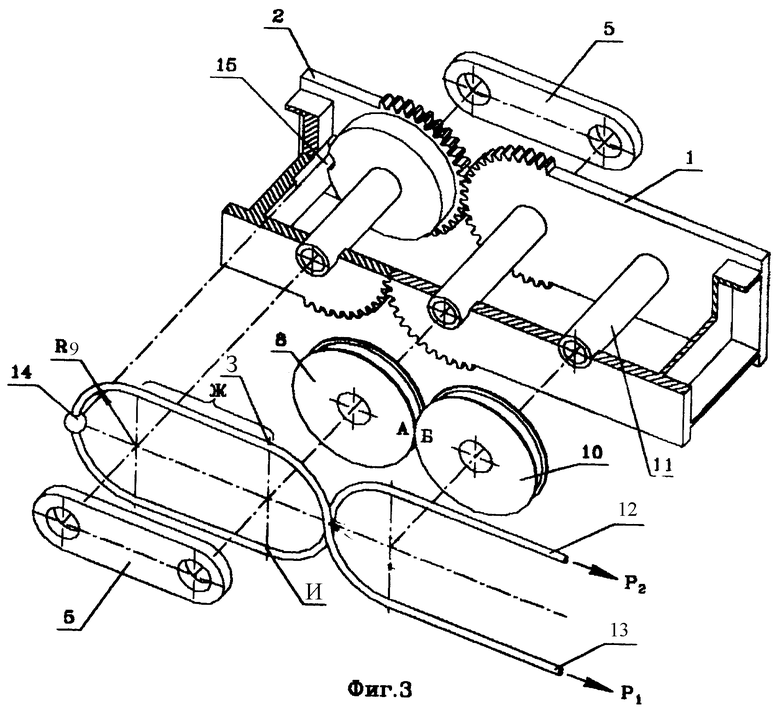
Фиг. 2, 3 - общий и "взорванный" виды шарнирного узла в аксонометрии.
Фиг. 4 - вариант конструктивного исполнения роликов по п. 2 формулы.
Шарнирный узел манипулятора состоит из ведущего звена 1 и ведомого звена 2, взаимодействующих между собой при помощи зубчатых венцов 3 и 4. Звенья связаны между собой двумя водилами 5, расположенными на оси 6 ведущего звена и оси 7 ведомого звена. На оси 6 расположен ролик 8 с возможностью свободного поворота.
В шарнирный узел введены вновь дополнительный ролик 9 и направляющий ролик 10. Дополнительный ролик 9 установлен на оси 7 и выполнен зацело с ведомым звеном 2, а направляющий ролик 10 расположен на дополнительной оси 11, которая установлена на ведущем звене 1. Гибкая тяга представляет собой трос, состоящий из двух ветвей 12 и 13. Соединение ветвей 12 и 13 между собой осуществлено элементами связи, выполненными, например, в виде шарика 14, который неподвижно закреплен на ведомом звене и заделан в ложементах 15, выполненных на ведомом звене 2 и ролике 9, неподвижно связанном с ведомым звеном. Ветви 12 и 13 гибкой тяги перекрещиваются между собой в зоне между роликами 8 и 10 и охватывают их по секторам "А" и "Б", обращенным друг к другу. "Сбегающие" с направляющего ролика 10 ветви 12 и 13 гибкой тяги взаимодействуют с приводной системой манипулятора.
На фиг. 4 изображено возможное конструктивное исполнение роликов шарнирного звена. Ролик 8 ведущего звена 1 выполнен из двух раздвинутых вдоль своей оси 6 дисков 8а и 8б (геометрически диски 8а и 8б представляют собой как бы ролик 8, рассеченный пополам плоскостью, перпендикулярной оси). Толщина дисков 8а и 8б составляет, приблизительно, 1/2 от толщины ролика 8. Аналогично выполнены дополнительный ролик 9 и направляющий ролик 10, также состоящие из двух раздвинутых вдоль соответствующих осей дисков 9а, 9б и дисков 10а, 10б. Диски 9а и 9б установлены на оси 7 ведомого звена 2, а диски 10а и 10б - на дополнительной оси 11, которая размещена на ведущем звене 1. Диски 8а-9б-10а охвачены ветвью 12 гибкой тяги, а диски 8б-9б-10б - ветвью 13. Причем диски 9а и 9б охвачены ветвями тяги приблизительно по четверти окружности диска, а диски 8а-10б и 8б-10б охвачены перекрещивающимися ветвями тяг по секторам "В"-"Г" и "Д"-"Е", обращенным друг к другу. Соединение концов ветвей 12 и 13 гибкой тяги на ведомом звене осуществляется, как описано выше, с помощью шариков 14 и ложементов 15.
Раздвижка дисков на соответствующих им осях определяет компоновку транзитных роликов, которые, в этом случае, могут размещаться между дисками. Такое исполнение роликов 8, дополнительных и направляющих роликов 9 и 10 позволяют уменьшить поперечные габариты шарнирного узла и, следовательно, снизить массу всего манипулятора в целом.
При работе шарнирного узла, когда движение шарнирному узлу передается от приводной системы манипулятора, разница в натяжении ветвей 12 и 13 передается через участки "Ж" троса и ролик 9 на элементы связи ветвей гибкой тяги, т. е. на шарик 14 и ложемент 15. При этом на ведомом звене 2 создается крутящий момент. Охват перекрещивающимися ветвями гибкой тяги ролика 8 и направляющего ролика 10 обеспечивает при повороте шарнира постоянное прилегание тяги к ролику 8 и направляющему ролику 10 в точках "З" и "И"
Работа шарнирного узла, конструктивно исполненного по фиг.4, аналогична действиям конструкции, изображенной на фиг. 1-3. Разность сил натяжения ветвей 12 и 13 передается через диски 9а и 9б на шарики 14 в ложементах 15. На ведомом звене 2 создается крутящий момент. Перекрещивающиеся ветви гибкой тяги вокруг дисков 8а и 10а и 8б и 10б при повороте шарнира обеспечивают постоянное прилегание тяги к дискам 8а и 8б, 10а и 10б.
Момент М2 на ведомом звене выражается формулой:
M2=(P12-P13)•R9,
где P12 - сила натяжения ветви 12 тяги,
P13 - сила натяжения ветви 13 тяги,
R9 - радиус ролика 9.
Из формулы видно, что момент на ведомом звене зависит только от радиуса ролика 9. т.е. во время работы ролик 9 приобретает функции ведущего ролика, что достигается перекрещиванием ветвей гибких тяг на направляющем ролике 10. При увеличении диаметра ролика 9 и соответственном уменьшении диаметра ролика 8 натяжение троса может быть уменьшено. Предложенный шарнирный узел отличается рациональным исполнением взаимосвязи гибкой тяги с роликами, которая позволяет увеличить нагрузочную способность гибкой тяги и, следовательно, увеличить жесткость конструкции. Конструкция шарнирного узла позволяет получить меньшие поперечные размеры, что уменьшает его габариты и массу.
Если сравнить конструкцию шарнирного узла по прототипу с предложенным решением, то очевидно, что при одинаковом радиусе ведущих роликов момент на ведущем звене в манипуляторе по прототипу меньше в два раза, чем в данном решении.
При увеличении диаметра ролика 9 и соответственном уменьшении диаметра ролика 8 натяжение троса также уменьшается, а следовательно, увеличивается жесткость шарнирного узла и манипулятора в целом.
Конструкция предложенного шарнирного узла позволяет исключить воздействие изгибающих моментов на водило, которое работает в данном шарнирном узле только на сжатие от сил натяжения троса и, следовательно, не является силовым элементом. Т. к. передача момента осуществляется парой "трос - водило" зубчатые венцы не участвуют при передаче нагрузки, следовательно, их исполнение может быть с минимальными габаритами. В результате происходит уменьшение габаритов и массы шарнирного узла и всего манипулятора.
Таким образом, предложенная конструкция шарнирного узла манипулятора позволяет увеличить передаточное отношение по крутящему моменту, что увеличивает жесткость конструкции за счет уменьшения натяжения троса. Увеличение жесткости происходит без увеличения габаритов манипулятора и его массы. Предложенная конструкция позволяет получить рациональную схему компоновки элементов манипулятора.
| название | год | авторы | номер документа |
|---|---|---|---|
| ШАРНИРНЫЙ УЗЕЛ МАНИПУЛЯТОРА | 1995 |
|
RU2156688C2 |
| ШАРНИРНЫЙ УЗЕЛ МАНИПУЛЯТОРА | 1995 |
|
RU2156687C2 |
| УСТРОЙСТВО ДЛЯ ПЕРЕДАЧИ ДВИЖЕНИЯ ЧЕРЕЗ ГЕРМЕТИЧНУЮ СТЕНКУ | 1995 |
|
RU2156904C2 |
| Манипулятор | 1983 |
|
SU1115898A1 |
| Многолучевая антенна | 2016 |
|
RU2642512C1 |
| Многолучевая антенна (варианты) | 2016 |
|
RU2623652C1 |
| ПРИВОД ВЕЛОСИПЕДА (ВАРИАНТЫ) | 2013 |
|
RU2539260C1 |
| МОДУЛЬНАЯ КОНСТРУКЦИЯ КОСМИЧЕСКОГО АППАРАТА | 2007 |
|
RU2374148C2 |
| Многолучевая антенна | 2015 |
|
RU2626023C2 |
| Двухколесный велосипед | 1989 |
|
SU1754561A1 |

Изобретение относится к машиностроению и может быть использовано в манипуляторах и роботах. На ведущем и ведомых звеньях манипулятора расположены взаимодействующие между собой зубчатые венцы. На оси ведущего звена установлен ролик, связанный посредством гибкой тяги с приводной системой. На оси ведомого звена размещен дополнительный ролик, охватываемый ветвями гибкой тяги. На ведущем звене смонтирована дополнительная ось, несущая направляющий ролик. Ролик ведущего звена и направляющий ролик охватываются по обращенным один к другому секторам перекрещивающимися ветвями гибкой тяги. На ведомом звене неподвижно закреплены элементы связи ветвей гибкой тяги. Каждый ролик может быть выполнен в виде двух раздвинутых вдоль своей оси дисков. Каждый диск дополнительного ролика охватывается ветвью гибкой тяги. Каждый диск ролика ведущего звена и каждый диск направляющего ролика охватываются по обращенным один к другому секторам перекрещивающимися ветвями гибкой тяги. В результате обеспечивается увеличение передаточного отношения шарнирного узла и повышение его жесткости. 1 з.п.ф-лы, 4 ил.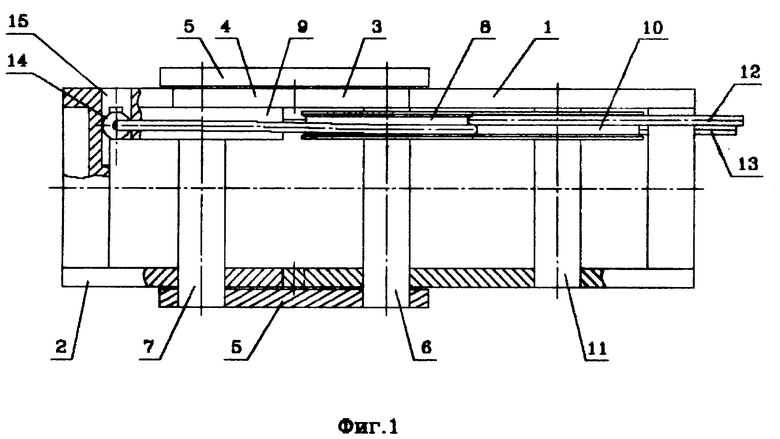
| Манипулятор | 1983 |
|
SU1115898A1 |
| Манипуляционное устройство | 1983 |
|
SU1122500A1 |
| SU 1484676 А1, 07.06.1989 | |||
| Рука манипулятора | 1984 |
|
SU1220781A1 |
| US 5193963 А, 16.03.1993 | |||
| СПОСОБ КОНЦЕНТРИРОВАНИЯ ИНДИЯ ИЗ СУЛЬФАТНЫХ ЦИНКОВЫХ РАСТВОРОВ | 1993 |
|
RU2048563C1 |
| DE 3408933 А1, 20.09.1984 | |||
| US 4984951, 15.01.1991. | |||
