Изобретение относится к автоматизированным системам управления (АСУ) технологическим процессом (ТП) и может быть использовано для управления электролизом алюминия.
Выбор наиболее приемлемого варианта АСУ ТП является важнейшей задачей, решение которой зачастую представляет собой компромисс между стоимостью, техническим уровнем, надежностью, комфортностью, затратами на сервисное обслуживание, полнотой программного обеспечения (ПО) и т.д.
В настоящее время на мировом рынке АСУ ТП имеется множество предложений, зачастую превышающих спрос.
На семинарах, проводимых на базе Института проблем управления РАН, демонстрируются изделия из многих зарубежных фирм: Honeywell, Elsag, ABB, AEG-Modicon, Foxboro, Dantoss, Valmet-Automation, Ficher-Rosemount, Festo, Vica, Moore Products, Autenco, Omron и д.р., демонстрируются изделия российских (и СНГ) системостроительных фирм. Это НПО "Техноконт", АО "Эмикон", АО "НИИтеплоприбор" с системой Униконт, АО "Импульс" с системой МСКУ, АО "Систематехника" с контроллерами Миконт, АО "ИНЭУМ" с контраллерами Сикон и д.р. ("Приборы и системы управления", 1996, N 3, с. 49 - 52).
Компонентами любой современной АСУ ТП являются дисплейные пульты оператора; микропроцессорные контроллеры (МК); сети, соединяющие входящие в АСУ компоненты; панели для мониторинга и настройки МК по месту их расположения; дополнительные средства пультов операторов (проекторы на экран, щитовые мозаичные мнемосхемы, звуковые речевые сигнализаторы и др.); прикладное ПО (ПО контроллеров, ПО пультов операторов, ПО общего назначения, ПО объектов назначения).
Известно устройство для управления процессом электролиза алюминия (а.с. СССР N1466656, C 25 C 3/20), содержащее электролизер, анод, глиноземную корку, электролит, жидкий алюминий, привод анода, катодную ошиновку, анодную ошиновку, трансформатор постоянного тока, преобразователь тока серии, сеть для последовательной передачи сигнала тока серии, регулятор электролизера, устройство защиты от чрезмерного перемещения анода, линию связи регулятора электролизера с ЭВМ верхнего уровня, механизм продавливания корки, дозатор глинозема.
Сущность изобретения заключается в том, что для управления алюминиевыми электролизерами применяется двухуровневая система. На нижнем уровне используются микропроцессорный регулятор для управления перемещением анода и механизмами питания, автономные блоки защиты системы от недопустимых перемещений анода.
Известна система контроля рабочего напряжения алюминиевого электролизера (а.с. СССР N 1617060, C 25 C 3/20), содержащая электролизер, первый и второй блоки масштабирования измеряемого сигнала, преобразующие рабочее напряжение электролизера в стандартном напряжении входа измерительного преобразователя, измерительный преобразователь стандартного сигнала в стандартный входной сигнал управляющей системы, блок переключения диапазона измерения сигнала, формирующего дискретный сигнал для переключения первого блока масштабирования, блок переключения диапазона измерения сигнала, формирующего дискретный сигнал для переключения второго блока масштабирования, блок защиты входа измерительного преобразователя от высокого напряжения, блок формирования и индикации дискретной информации, управляющую систему, формирующую управляющие воздействия на приводы исполнительных механизмов электролизера. Система контроля рабочего напряжения каждого электролизера серии входит в состав централизованной АСУ ТП "Электролиз" на базе мини-ЭВМ.
Известна автоматизированная система управления производством алюминия ("Современные технологии автоматизации", 1997, N 4, с. 56 - 61, рис. 2 - ПРОТОТИП).
Известная АСУ ТП содержит на верхнем уровне пульт управления технолога, первый и второй пульты управления операторов, объединенные сетью АСУ ТП. Нижний уровень выполнен на базе блоков управления (БУ) электролизерами. Все БУ объединены в единую сеть корпуса электролизера. В эту сеть включены компьютер верхнего уровня пульта управления оператора и контроллер тока/напряжения серии (КТНС). БУ в своем составе содержит контроллер Micro PC фирмы Octagon с модулями оптической развязки, модулия термостатирования, силовые модули управления двигателями привода анодной рамы, клеммные колодки, автоматы-расцепители питания двигателей. БУ объединены в группы. Каждый БУ в группе управляет двумя электролизерами корпуса, кроме БУ, установленных у торцов корпуса. В этом случае БУ управляет одним электролизером корпуса.
КТНС выполнен на контроллере Micro PC фирмы Octagon и аналоговых модулях ввода. КТНС включен в единую локальную вычислительную сеть (ЛВС) с БУ корпуса.
Известные АСУ ТП либо не могут быть использованы при определенных эксплуатационных требованиях, таких как: наличие в аппаратуре не менее двух ступеней гальванической развязки с разделительным напряжением не менее 1500 В постоянного тока каждой ступени от напряжения электролиза (потенциала электролизера); обеспечение непрерывной круглосуточной многолетней работы АСУ ТП при наличии в воздухе мелкодисперсной абразивной и токопроводящей пыли, фтористых и сернистых газов, сезонных колебаний температуры окружающей среды от -40 до +50oC, сильных постоянных магнитных полях и высоких уровней коммутационных электромагнитных помех при работе оборудования цеха, либо неоправданно сложны, избыточны и дорогостоящи.
Технической задачей изобретения является расширение функциональных возможностей и улучшение эксплуатационных характеристик при снижении объема и стоимости аппаратуры; повышение технико-экономических показателей технологического процесса: снижение удельных расходов электроэнергии, сырья, материалов, трудозатрат на технологическое обслуживание электролизеров, увеличение выпуска металла, улучшение условий труда.
Предлагаемая распределенная АСУ электролизом алюминия "ЭЛЕКТРА" предназначена для автоматизации процесса управления серией до 255 электролизеров и позволяет обеспечить:
максимальный учет специфики объекта управления и реальных условий эксплуатации при существенном (в десятки раз) снижении габаритно-массовых характеристик (ГМХ) за счет исключения избыточности и путем обеспечения оптимального распределения необходимых функций между блоками системы, использования разработанных для целей электролиза алюминия специализированных малогабаритных узлов и модулей;
существенное сокращение затрат на установку и монтаж АСУ ТП за счет установки аппаратуры непосредственно на объекте контроля - электролизере или на существенных конструкциях помещения электролизного цеха, что не требует специальных помещений;
повышение срока службы АСУ ТП за счет улучшенной герметизации (исполнение IP65) корпусов блоков, отсутствия нагревательных элементов с недолговечными электромеханическими вентиляторами, обеспечения возможности восстановления аппаратуры при отказах путем обеспечения возможности замены малогабаритных блоков системы, невскрываемых в условиях загрязненного цеха;
существенное снижение стоимости линий связи за счет сокращения их количества общей длины (на десятки километров), использования недорогого парновитого кабеля и обычных электрических проводов;
обеспечение возможности поэтапного подключения в систему электролизеров (с шагом в один электролизер) без остановки действующего технологического процесса электролиза алюминия.
Система обеспечивает выполнение следующих функций:
автоматическая стабилизация теплового режима процесса электролиза за счет стабилизации на заданном уровне напряжения электролизера в нормальном технологическом режиме;
автоматическая стабилизация напряжения при выливке металла;
автоматическая коррекция уставок после анодного эффекта (АЭ), обработка и переключение анодных штырей;
прогноз и обнаружение АЭ, измерение их амплитудных и временных параметров;
периодически вычисление значений внутренней ЭДС электролизеров с использованием естественных флуктуаций тока серии;
измерение напряжения и тока серии, напряжений групп электролизеров по бригадам, уровня шумов напряжений электролизеров, определение места нахождения нулевого потенциала серии относительно "земли";
контроль и диагностика технических и технологических нарушений, блокировка выполнения отдельных функций системы с целью предупреждения развития аварийных ситуаций;
автоматическое оповещение обслуживающего персонала о технологических нарушениях по цеховой и компьютерной громкой связи с помощью селективной системы речевых сообщений, формирование соответствующей световой и звуковой сигнализации в помещениях отдыха или совещаний электролизников;
обеспечение диалога эксплуатационного персонала с АСУ ТП при помощи мнемонической индикации и меню на пультах оператора и технологов, реализация его запросов и команд;
формирование базы данных технологического процесса и системы, вывод накопленной информации в виде оперативных сообщений, видеокарт и печатных документов.
Поставленные задачи решаются следующим образом.
Предлагается распределенная АСУ электролизом алюминия, содержащая многотерминальный пульт управления (ПУ) и специализированные контроллеры, объединенные в ЛВС, причем информационные входы-выходы специализированных контроллеров соединены с ЛВС, а управляющие и аналоговые входы-выходы специализированных контроллеров соединены с управляющими и аналоговыми входами-выходами объекта управления, отличающаяся тем, что многотерминальный ПУ выполнен в виде одного пульта оператора, N пультов технолога, сервера базы данных и усилителя низкой частоты, кроме того, в систему введены концентратор вычислительной сети (КВС), контроллеры группы (КГ), контроллеры управления проводом (КУП), контроллер преобразования тока (КПТ), контроллер преобразования напряжения (КПН), контроллеры отображения сигнализации (КОС), контроллер технологический переносной (КТП), причем первый информационный вход-выход КВС подключен к входу-выходу последовательного порта пульта оператора, а второй информационный вход-выход КВС подключен к сегменту ЛВС верхнего уровня, управляющий вход-выход КВС подключен к групповому выключателю (ГВ), аналоговый вход КВС соединен с входом звуковой карты пульта оператора, аналоговый выход КВС соединен с входом усилителя низкой частоты (УНЧ), входы-входы пульта оператора и N пультов технолога соединены с входом-выходом сервера базы данных, КГ и КУП разделены на восемь групп, к каждому КГ подключено до n КУП (например, 32 КУП) по количеству объектов управления в серии, причем КУП установлен непосредственно на объекте управления (электролизере), первый информационный вход-выход каждого КГ подключен к сегменту ЛВС верхнего уровня, а второй информационный вход-выход каждого КГ подключен к групповому сегменту ЛВС, аналоговый вход Иэ каждого КУП подключен к аноду и катоду электролизера, каждый КУП снабжен технологическим входом-выходом для подключения КТП, КПТ информационным входом-выходом соединен с сегментом ЛВС верхнего уровня, а аналоговый вход (Ic) КПТ соединен с датчиком тока серии, кроме того, КПТ снабжен технологическим входом-выходом для подключения КТП, аналоговым входом (Ик) КПН соединен с анодом и катодом первого электролизера в каждой группе и n электролизера в серии, информационный вход-выход КПН соединен с сегментом ЛВС верхнего уровня, информационные входы-выходы первого второго КОС также подключены к сегменту ЛВС верхнего уровня.
На фиг. 1 изображена структурная схема АСУ электролизом алюминия; на фиг. 2 - блок-схема КПТ; на фиг. 3 - блок-схема КВС; на фиг. 4 - блок-схема КОС; на фиг. 5 - блок-схема КПН; на фиг. 6 - блок-схема КГ; на фиг. 7 - блок-схема КУП; на фиг. 8 - блок-схема КТП.
На фиг. 1 показано: многотерминальный пульт 1 управления, включающий в себя пульт 2 оператора, N пультов 31....3n технологов, сервер 4 базы данных, УНЧ 5, КВС 6, линия 7 связи последовательного порта пульта оператора, линия 8 связи выхода звуковой карты пульта оператора со входом УНЧ 5; первый информационный вход-выход КВС 6 подключен к входу-выходу последовательного порта пульта 2 оператора, а второй информационный вход-выход КВС 6 подключен к сегменту ЛВС 13 верхнего уровня, управляющей вход-выход КВС 6 подключен к групповому выключателю (ГВ), аналоговый вход 15 КВС 6 соединен с выходом звуковой карты пульта 2 оператора, аналоговый выход КВС 6 соединен с входом УНЧ 5, входы-выходы пульта 2 оператора и N пультов (31....3n) технолога соединены с входом-выходом сервера 4 базы данных; на фиг. 1 также показано: КГ 8, КУП 91...9n, КПТ 10, КПН 11, КОС 12, сегмент 13 ЛВС верхнего уровня, групповой сегмент 14 ЛВС, аналоговый выход 15 КВС 6, КТП 16. Многотерминальный пульт 1 управления связан со специализированными контроллерами через КВС 6, первый информационный вход которого соединен через линию 7 с пультом 2 оператора, второй информационный вход-выход - с сегментом 13 ЛВС верхнего уровня, управляющий вход-выход КВС 6 подключен в ГВ, группа аналоговых входов 15 КВС 6 соединена с выходом звуковой карты пульта 2 оператора, группа аналоговых выходов 8 КВС 6 соединена с входом УНЧ 5, КГ 8 и КУП 91....9n разделены на восемь групп, к каждому КГ 8 подключено, например, по 32 КУП (по количеству электролизеров в серии), причем КУП 91....9n установлены непосредственно на электролизерах (на чертеже не показаны), первый информационный вход-выход каждого КГ 8 подключен к сегменту 13 ЛВС верхнего уровня, а второй информационный вход-вход каждого КГ 8 подключен к групповому сегменту 14 ЛВС, аналоговый вход (Иэ) каждого КУП 91...9n подключен к аноду и катоду электролизера, каждый КУП 91. . . 9n имеет технологический вход-выход для подключения КТП 16, КПТ 10 информационным входом-выходом соединен с сегментом 13 ЛВС верхнего уровня, а группа аналоговых входов КПТ (Iс) с датчиком тока серии (на чертеже не показан), кроме того, КПТ имеет технологический вход-выход для подключения КТП 16, группа аналоговых входов КПН 11 (Ик) соединена с анодом и катодом первого электролизера в каждой группе и n - электролизера в серии, информационный вход-выход КПН 11 соединен с сегментом 13 ЛВС верхнего уровня, информационные входы-выходы КОС 121 и КОС 122 также подключены к сегменту 13 ЛВС верхнего уровня.
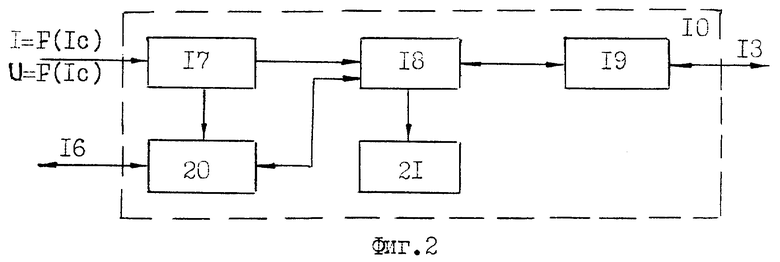
На фиг. 2 показано: блок 17 измерения тока серии (БИТС), микроконтроллер 18 (МК), приемопередающее устройство 19 (ППУ), блок 20 технологический (БТ) для подключения КТП 16, блок 21 индикации (БИ), вход БИТС 17 является информационным входом КПТ 10, вход-выход БТ 20 является первым технологическим входом-выходом ППУ 19 является вторым входом-выходом КПТ 10 для связи с сегментом 13 ЛВС верхнего уровня.
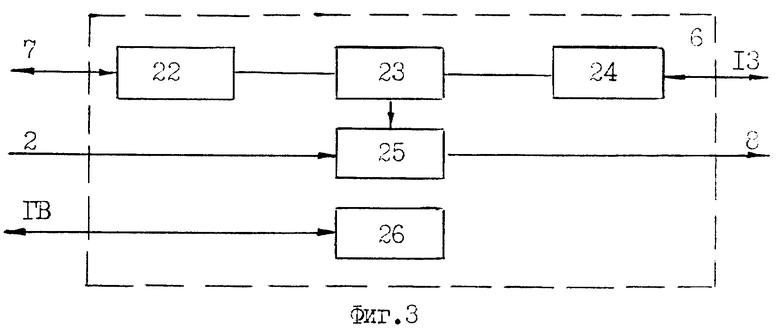
На фиг. 3 показано: ППУ 22, МК 23, ППУ 24, блок 25 управления громко говорящей связью (БУГГС), блок 26 управления группой выключателей (БУГВ) вход-выход ППУ 22 является первым входом-выходом КВС 6 для связи 7 с пультом 2 оператора, вход-выход ППУ 24 является вторым информационным входом-выходом КВС 6 для связи с сегментом 13 ЛВС верхнего уровня, вход БУГГС 25 является управляющим входом КВС 6, а выход БУГГС 25 является аналоговым выходом 8 для связи с УНЧ 5, вход-выход БУГВ 26 является управляющим выходом КВС 6.
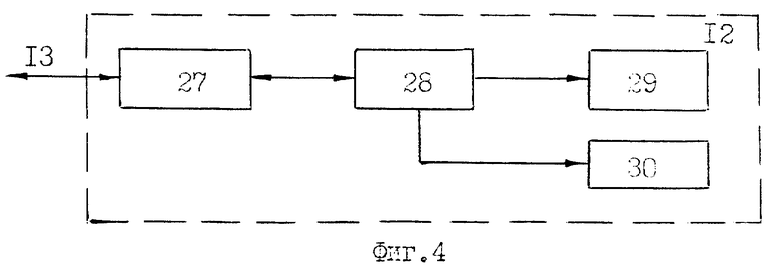
На фиг. 4 показано: ППУ 27, МК 28, БИ 29, блок сигнализации (БС) 30, вход-выход ППУ 27 является информационным входом-выходом КОС 12 для связи с сегментом 13 ЛВС верхнего уровня.
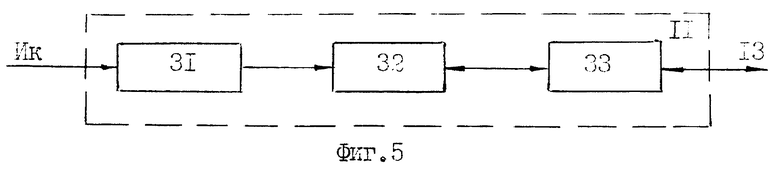
На фиг. 5 показано: блок измерения напряжения (БИН) 31 корпуса, МК 32, ППУ 33, вход БИН 31 является входом Ик КПН 11, вход-выход ППУ 33 является информационным входом-выходом КПН 11 для связи с сегментом 13 ЛВС верхнего уровня.
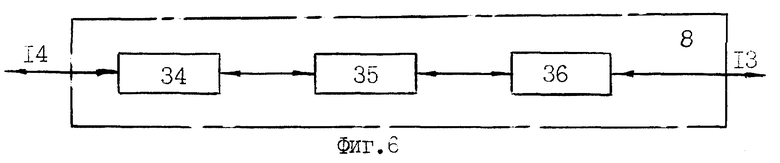
На фиг. 6 показано: ППУ 34, МК 35, ППУ 36, вход-выход ППУ 34 является информационным входом-выходом КГ 8 для связи с групповым сегментом 14 ЛВС, а вход-выход ППУ 36 является информационным входом-выходом КГ 8 для связи с сегментом 13 ЛВС верхнего уровня.
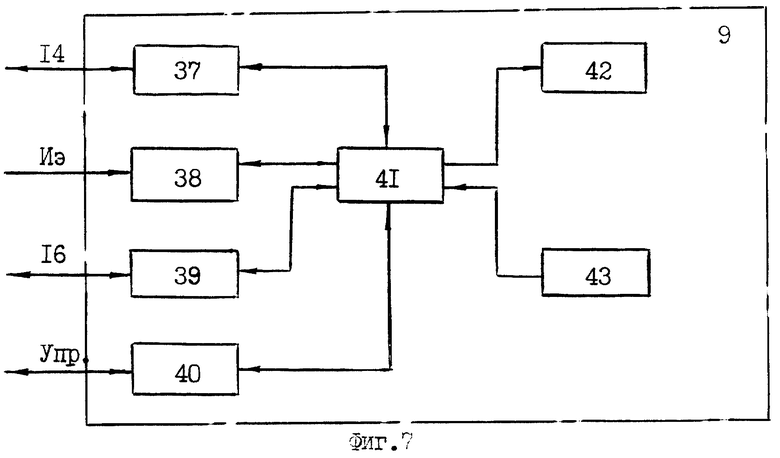
На фиг. 7 показано: ППУ 37, блок 38 измерения рабочего напряжения электролизера (БИРНЭ), блок 39 технологический (БТ) для подключения КТП 16, блок 40 управления приводом (БУП) анода электролизера, МК 41, БИ 42, панель 43 управления, вход-выход ППУ 37 является информационным входом-выходом КУП 9 для связи с групповым сегментом 14 ЛВС, вход БИРНЭ 38 является входом Иэ КУП 9, вход-выход БТ 39 является технологическим входом-выходом КУП 9 для связи КТП 16, вход-выход БУП 40 является управляющим входом-выходом КУП 9 для связи с объектом управления.
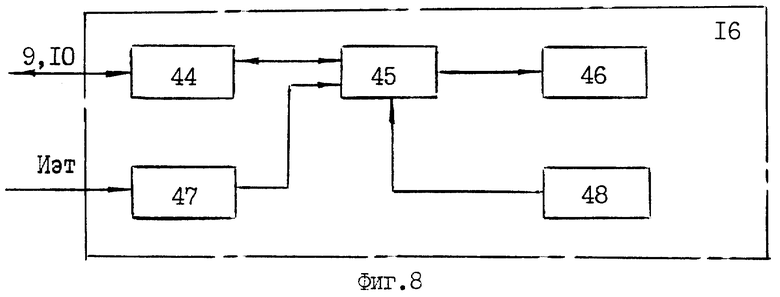
На фиг. 8 показано: ППУ 44, МК 45, жидкокристаллический дисплей 46 (ЖКД), блок 47 измерения эталонного напряжения (БИЭН), клавиатура 48, вход-выход ППУ 44 является входом-выходом RS-232 КТП 16, вход БИЭН 47 является входом Иэт КТП 16. КВС 6 осуществляет подключение выхода звуковой карты пульта 2 оператора ко входу 8 УНЧ 5 при формировании селективных речевых сообщений по цеховой ГТС и формирование команд управления ГВ питания механизма электролизеров при возникновении предаварийных ситуаций.
КГ 8 обеспечивает согласование скоростной передачи данных по линиям 13 связи сегмента ЛВС верхнего уровня, выполненным парно-витым кабелем, и линиям 14 группового сегмента ЛВС, проложенным непосредственно по электролизеру и выполненным недорогим термостойким электротехническим проводом.
КУП 9 является индивидуальным для каждого электролизера и обеспечивает реализацию функций управления электролизером во всех технологических режимах, измерение параметров электролиза, отображение параметров электролиза для технологического персонала на собственном матричном дисплее, независимую от работоспособности контроллера световую индикацию возникшего АЭ, гальваническую развязку цепей первичного питания, управления приводом и ЛВС от потенциала электролиза не менее 1500 В. В КУП 9 предусмотрена автоматическая тарировка измерительного тракта, парирующая технологические, временные и температурные воздействия на точностные характеристики измерительного тракта. Так как КУП 9 устанавливается непосредственно на электролизере, это обеспечивает минимизацию линий связи по трактам измерения и управления, а также обеспечивает удобство работы технологического персонала.
КПТ 10 обеспечивает измерение тока серии с датчика тока серии, имеющего, например, стандартный токовый выход I = F = Ic) или напряжения с шунта U = F(Ic), и передачу текущего значения тока серии в КГ 8, КУП 9, КОС 12, КВС 6 по линии связи сегмента 13 ЛВС верхнего уровня и группового сегмента 14 ЛВС. В КПТ 10 предусмотрена автоматическая тарировка измерительного тракта, парирующая технологические, временные и температурные воздействия на его точностные характеристики. КПТ 10 устанавливается в помещении кремниевой питающей подстанции.
КПН 11 обеспечивает изменение напряжения Ик электролиза серии, групп электролизеров по бригадам, положение "нуля" серии и передачу преобразованных цифровых значений напряжений в сегмент 13 ЛВС верхнего уровня. КПН 11 устанавливается в помещении электролизного цеха.
Первый и второй КОС 121 и КОС 122 устанавливается в помещениях отдыха электролизников и обеспечивают звуковую сигнализацию о возникновении АЭ, отображение на собственном матричном дисплее номеров электролизеров, на которых зафиксирован АЭ. В КОС 121 и КОС 122 предусмотрен режим "бегущей строки", позволяющей отображать текстовую информацию, передаваемую с пульта 2 оператора. В промежутках, когда нет АЭ, на дисплее отображается текущее значение тока серии и времени суток. Информацию об АЭ, значение тока серии и времени суток, а также сообщения с пульта 2 оператора КОС 121 и КОС 122 получают по линиям связи сегмента 13 ЛВС верхнего уровня. Наличие в составе АСУ электролизом алюминия КОС 121 и КОС 122 обеспечивает экономию электроэнергии за счет оперативного оповещения и принятию мер по гашению АЭ.
КТП 16 при необходимости подключается к технологическим входам КУП 91... 9n и КПТ 10 и обеспечивает поддержание метрологических характеристик измерительных трактов на протяжении всего срока жизнедеятельности системы в условиях цеха без отключения КУП 91. ..9n и КПТ 10 за счет периодического (например, один раз в один-два года) уточнение поправочных коэффициентов во FLASH-памяти указанных контроллеров, КПТ 16 может также использоваться как оперативный переносной пульт технолога, имеющий доступ к базе данных сервера 4 через КУП 91...9n, позволяющий в условиях цеха отображать на собственном графическом дисплее дополнительные технологические параметры в алфавитно-цифровом и графическом виде, изменять при необходимости уставки и настраиваемые параметры технологических алгоритмов. Применение КТП 16 позволяет расширить информационные и сервисные функции КУП 91...9n без значительных затрат на их реализацию по сравнению с реализацией этих функций в каждом КУП 91...9n.
Специализированные коллекторы системы выполнены в виде малогабаритных, легко переносимых одним человеком блоков. Так, например, размеры КУП 9 - 250х160х122 мм вес - 2,5 кг; размеры КГ 8 - 200х120х77 мм, вес - 1 кг. Учитывая условия эксплуатации, все блоки выполнены на базе IP65.
Оборудование системы не требует специальных помещений и устанавливается непосредственно в помещениях электролиза: на стенах, колоннах, корпусах электролизеров.
Кабельная сеть системы имеет ограниченную протяженность и невысокую стоимость за счет прокладки измерительных и управляющих цепей в пределах электролизера электротехническим проводом.
Линии цифровой связи ЛВС выполнены парноперевитым кабелем, а в пределах электролизера - двумя перевитыми электротехническими проводами с термостойкой изоляцией.
Система обеспечивает восстановление работоспособности блоков в условиях цеха путем замены неисправного блока исправным без разгерметизации блока.
Аппаратура системы имеет не менее двух ступеней гальванического разделения цепей первичного питания, измерения и управления от потенциала "земли" с разъединяющим напряжением каждой ступени от 1500 до 7500 В.
В системе предусмотрено сохранение при неисправном КУП 91...9n функций ручного управления приводом анодного массива и независимая световая индикация наличия АЭ.
Сервер базы данных - это многопользовательская система управления данными, которая централизованно осуществляет поиск и обработку данных, запрошенных прикладными программами в узлах вычислительной сети (Першиков В.И., Савинков В. М. Толковый словарь по информатике. - М.: Финансы и статистика, 1995, с. 354).
База данных (БД) - это совокупность данных, организованных по определенным правилам, предусматривающих общие принципы описания, хранения и манипулирования данными. Обращение к БД осуществляется с помощью системы управления базами данных (СУБД).
СУБД - это комплекс программ и языковых средств, предназначенных для создания, ведения и использования БД.
Серверы БД широко используются при построении АСУ ТП. Так, например, при описании функциональной схемы АСУ связью (АСУС) описан сервер БД (журнал "Приборы и системы управления", 1998, N 9, стр. 28, рис. 2). В состав сервера БД входит, например, модуль анализа состояния (МАС), который принимает сигналы об изменении состояния параметров объекта контроля. Параметры состояния объекта контроля хранятся в оперативной памяти МАС.
Таким образом, сервер БД - это ЭВМ, выполняющая определенные функции, параметры состояния объекта управления и контроля (электролизера) хранятся в оперативной памяти.
Объект управления в данной заявке - это электролизер (т.е. ванна, где происходит процесс электролиза алюминия).
Аббревиатурой Иэ обозначен только аналоговый вход (Иэ) каждого контроллера управления приводом (КУП) 91...9n.
КУП 91...9n в каждой группе устанавливается на объекте контроля и управления - электролизере. Это является одним из преимуществ заявленного объекта, так как сокращает затраты на установку и монтаж АСУ ТП. Установка КУП 91. ..9n на самом электролизере или на конструкциях помещения электролизного цеха в зоне высоких температур и агрессивной среды стала возможной благодаря разработке специально для целей электролиза алюминия специализированных модулей - КУП 9, выполненных в виде малогабаритных, легко переносимых одним человеком блоков.
Система сохраняет работоспособность при отключении в случае неисправности или проведении плановых профилактических работ многотерминального пульта 1 и КВС 6.
В АСУ ТП предусмотрены следующие режимы работы: "Автоматизированное управление", "Дистанционное управление", "Ручное управление".
В режиме "Автоматизированное управление" решаются следующие задачи:
автоматическое регулирование напряжения электролизера в нормальном режиме;
автоматическое регулирование напряжения электролизера в процессе выливки металла;
автоматическая коррекция установок после АЭ, обработки и переключения анодных штырей;
автоматическое обнаружение и контроль параметров АЭ;
автоматическое определение внутренней ЭДС электролизеров с использованием естественных флуктуаций тока серии;
измерение напряжения и тока серии, напряжений групп электролизеров по бригадам, напряжений электролизеров и уровня шума, определения нулевого потенциала серии относительно "земли";
тарирование измерительных каналов;
проверка достоверности и фильтрации результатов измерения;
контроль перемещения привода анода;
контроль работоспособности отдельных компонентов системы;
автоматизированный учет показателей работы серии электролизеров, обработка данных с целью формирования документов для анализа и решений по управлению технологических режимов производства алюминия.
В режиме "Дистанционное управление" система выполняет все информационные функции, а управление приводами анодов осуществляется технологическим персоналом с помощью директив, задаваемых с ЭВМ пультов 2 оператора.
В режиме "Ручное управление" при возникновении предаварийных и аварийных ситуаций на электролизерах осуществляются неавтоматизированные регламентные работы и операции по обработке электролизеров при сохранении информационных функций системы.
Для решения задач автоматизированного управления электролизом алюминия в системе функционируют следующие программно-аппаратные подсистемы:
сбора первичной информации;
первичной обработки информации;
формирование управляющих воздействий;
регулирование напряжения электролизера;
управление системой;
контроля функционирования системы, диагностики и оповещения;
живучести и резервирования;
базы данных параметров;
базы данных отчетов.
Подсистема сбора первичной информации выполняет следующие функции:
осуществляет измерение при помощи КПТ 10 мгновенных значений аналоговых сигналов с датчика тока серии и передачу их в преобразованном цифровом коде через ППУ 19 в сегмент 13 ЛВС верхнего уровня и КУП 91...9n. Измерение напряжения производится индивидуально для каждого электролизера соответствующим КУП 9 91...9n. Измерение напряжения корпуса, положение "нуля" серии и бригадных напряжений осуществляется КПН 11 и через ППУ 33 и сегмент 13 ЛВС верхнего уровня передается в ЭВМ пульта 2 оператора;
осуществляет опрос органов задания режимов работы системы через КУП 91.. . 9n. С помощью органов задания режимов производится задание режимов работы "Система", "Ручной", команд "Выливка", "Обработка";
производит контроль функционирования исполнительных органов привода анода электролизера.
Подсистема первичной обработки информации выполняет следующие функции:
масштабирование измеренных мгновенных значений аналоговых сигналов тока серии, напряжений корпуса и напряжений электролизера;
тарировка измерительных каналов тока серии и напряжения электролизера с использованием Иэт;
проверка достоверности результатов измерений;
расчет приведенного напряжения электролизера с использованием значения внутренней ЭДС (Eо) и номинального тока серии;
вычисление значений внутренней ЭДС (Eо) с использованием накопленных за определенный интервал времени пары значений напряжения электролизера и тока серии, полученных при достаточном размахе естественных флуктуаций тока серии и стабильном состоянии электролизера;
контроль флуктуации Ипр. При превышении флуктуации порогового значения формирование сообщений о снятии электролизера с регулирования;
обнаружение и контроль АЭ, сравнивание АЭ с регламентным значением (уставкой АЭ), осуществление фильтрации входной информации при обнаружении АЭ;
обработка дискретной информации органов задания режимов работы системы, БУП 40, КУП 91...9n и использование обработанной дискретной информации для анализа работы привода анодного массива и смены режимов регулирования.
Подсистема формирования управляющих воздействий выполняет следующие функции:
выдача управляющих воздействий БУП 40. В режиме "Дистанционное управление" перемещение анодного массива осуществляется с помощью органов ручного управления КУП 91...9n.
Подсистема регулирования напряжения электролизера выполняет следующие функции:
в режиме "Ручное управление" регулирование напряжением электролизера с помощью органов ручного управления;
в режиме "Дистанционное управление" выдача оператором системы команды перемещения анодного массива;
в режиме "Автоматизированное управление" автоматическое регулирование напряжения электролизера в нормальном режиме на основании вычислительного рассогласования между заданным и фактическим значениями приведенного напряжения; прекращение автоматического регулирования;
перевод системы в режим "Ручное управление";
запрет регулирования оператором системы;
запрет регулирования в процессе обработки ванны (электролизера);
запрет регулирования после АЭ;
выявление неэффективного регулирования;
определение недостоверности входной информации;
возникновение неисправностей в приводе анода.
Подсистема управления системой выполняет следующие функции:
задание и снятие запретов регулирования для конкретного электролизера или группы электролизеров;
коррекция уставок контуров регулирования для конкретного электролизера или групп электролизеров;
дистанционное управление приводом анодного массива;
задание режима регулирования после переключения анодных штырей.
Подсистема контроля функционирования системы, диагностика и оповещения выполняет следующие функции:
контроль функционирования при помощи КВС 6 аппаратных средств;
формирование диагностической информации для оператора системы и обслуживающего персонала и выдача информации в мнемоническом и текстовом виде.
Подсистема живучести и резервирования обеспечивает сохранение возможности управления электролизерами в объеме заданных функций при неисправности линий ЛВС и устройств верхнего уровня за счет использования автоматического регулирования последних значений уставок.
База данных параметров ведется на верхнем уровне и позволяет накапливать следующие данные по каждому электролизеру:
уставка контуров регулирования;
значение внутренних ЭДС электролизеров;
динамические характеристики регулирования;
ограничения процесса регулирования.
База данных отчета позволяет накапливать следующие данные по каждому электролизеру:
текущее состояние электролизера;
АЭ: время, длительность, глубина;
средняя уставка напряжения электролизера;
среднее напряжение на электролизере с учетом АЭ и без их учета;
приведенное напряжение электролизера;
ток серии;
напряжение серии и бригадные напряжения;
положение нуля серии;
расход электроэнергии на электролиз;
суммарное время перемещения анода вверх и вниз;
время запретов регулирования, причина запретов;
количество регулирующих воздействий.
Измерение напряжения электролизера Иэ осуществляется КУП 91...9n, измерительный тракт которых работает в двух режимах: измерение и тарировка. Выбор режима осуществляется программой. Измерение Иэ производится в двух диапазонах D1 и D2, D1(0 - 10В) при Иэ < 7В, D2(0 - 100В) при Иэ > 7В. Переключение диапазонов осуществляется программно. Преобразование Иэ в цифровой вид осуществляется путем промежуточного преобразования Иэ в частоту следования импульсов F(Иэ) с последующим преобразованием частоты в цифровой эквивалент. Режим тарировки используется для оценки погрешности преобразования тракта измерения и ее учета в виде тарировочных коэффициентов в алгоритмах измерения Иэ. Тарировка тракта измерения производится в D1 и D2 по двум эталонным напряжениям (Ит1 = 3В и Ит2 = 6В). Выбор Иэт осуществляется программно.
Измерение тока серии осуществляется КПТ 10. Тракт измерения тока серии Ic имеет диапазон измерений Ic КА - 0 - 100, погрешность преобразования, % - < 0,35. Измерение Ic осуществляется путем промежуточного преобразования Ic, снимаемого с БИТС 17, в напряжение тока серии И (Ic) и далее в частоту следования импульсов F(Ис) с последующим преобразованием частоты в цифровой эквивалент. Тракт измерения Ic имеет два режима работы: измерений и тарировки. В исходном состоянии работает режим измерений. Установка в режим тарировки осуществляется программно. Режим тарировки используется для оценки погрешности преобразования и ее учета в виде тарировочных коэффициентов в алгоритмах измерения Ic. Тарировка тракта измерения производится по двум эталонным напряжениям (Ит1 = 0,03В и Ит2 = 0,06В). Выбор Иэт осуществляется программно.
Измерение напряжений серии и групп электролизеров осуществляется КПН 11 с помощью семиканального АЦП. Тракт измерения имеет семь каналов входных напряжений, диапазон измерения входного напряжения каждого канала, В - ±800, погрешность каждого канала, % - < 0,5.
Управление приводом анодного массива производится по командам "ZV", "M", "V". Команда "ZV" управляет включением защитного выключателя программным путем. В режиме автоматического регулирования при отсутствии аварийных ситуаций защитный выключатель находится во включенном положении и коммутирует напряжение 220В 50Гц на контакты управления реле "M", "V". При обнаружении аварийной ситуации команда "ZV" снимается либо программным путем, либо аппаратными средствами при срабатывании схемы временной защиты. В случае несрабатывания защитного выключателя срабатывает схема защиты верхнего уровня. При переводе КУП 91...9n в режим "Ручное управление" блокируется управление от контроллера и отключается схема временной защиты, что позволяет управлять приводом анода без временных ограничений. При возникновении аварийных ситуаций в режиме "Ручное управление" снятие напряжения с двигателя привода анода осуществляется либо снятием режима "Ручное управление", либо отключением питания электролизера, либо отключением напряжения с двигателя привода анода с верхнего уровня. Команды "M", "V" управляют перемещением анодного массива. В режиме автоматического управления команды "M", "V" формируются программным путем или с помощью органов управления, расположенных на электролизере. По команде "M" осуществляется перемещение анодного массива вниз, по команде "V" - вверх. В режиме "Ручное управление" команды "M", "V" формируются с помощью органов ручного управления.
Контроль перемещения анодного массива осуществляется программно: постоянный контроль наличия напряжения на обмотках двигателя привода анода при отсутствии команд "M", "V", при обнаружении данной ситуации формируется команда на отключение защитного выключателя и производится регистрации отключения; контроль направления перемещения анодного массива при задании команд "M" или "V"; контроль пропадания одной их фаз питающего напряжения в процессе перемещения анодного массива и регистрация пропадания напряжения; контроль времени перемещения анодного массива, в случае его превышения уставки срабатывает схема временной защиты, которая отключает защитный выключатель.
Обнаружение АЭ осуществляется КУП 91...9n путем сравнения напряжения электролизера с уставкой АЭ. Сообщение об АЭ поступает на верхний уровень оператору системы, обслуживающему персоналу в цехе и в бытовках.
В состав КОС 121 и КОС 122 входит БС 29 и БС 30, на которых отображается служебная информация о состоянии технологического процесса электролиза.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УПРАВЛЕНИЯ ЭЛЕКТРОЛИЗЕРАМИ ДЛЯ ПОЛУЧЕНИЯ АЛЮМИНИЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2000 |
|
RU2189403C2 |
| ТЕЛЕВИЗИОННОЕ СРЕДСТВО НАБЛЮДЕНИЯ | 1993 |
|
RU2094956C1 |
| Система защиты территориальных и внутренних морских вод | 2020 |
|
RU2742903C1 |
| РАСПРЕДЕЛЕННАЯ ИНТЕГРИРОВАННАЯ МНОГОФУНКЦИОНАЛЬНАЯ СИСТЕМА КОНТРОЛЯ И УПРАВЛЕНИЯ КОМПЛЕКСОМ ЗДАНИЙ | 2004 |
|
RU2282229C1 |
| АВТОМАТИЧЕСКАЯ НРЛС С УВЕЛИЧЕННЫМ НЕОБСЛУЖИВАЕМЫМ ПЕРИОДОМ АВТОНОМНОЙ РАБОТЫ | 2012 |
|
RU2522910C2 |
| СТАНЦИЯ ОПЕРАТИВНОЙ ТЕЛЕФОННОЙ И ДОКУМЕНТАЛЬНОЙ СВЯЗИ | 2011 |
|
RU2474068C1 |
| МОБИЛЬНАЯ РАДИОЛОКАЦИОННО-ОПТИЧЕСКАЯ СИСТЕМА | 2023 |
|
RU2817396C1 |
| ПОДВИЖНАЯ АППАРАТНАЯ СВЯЗИ, КОНТРОЛЯ И УПРАВЛЕНИЯ ДЛЯ ТРАНСПОРТНОЙ СЕТИ ПОЛЕВОЙ СИСТЕМЫ СВЯЗИ | 2017 |
|
RU2645285C1 |
| ПОДВИЖНАЯ АППАРАТНАЯ КВ-УКВ РАДИОСВЯЗИ | 2019 |
|
RU2711025C1 |
| ПЕРЕНОСНАЯ РАДИОЛОКАЦИОННАЯ СТАНЦИЯ РАЗВЕДКИ НАЗЕМНЫХ ДВИЖУЩИХСЯ ЦЕЛЕЙ С ЦИФРОВОЙ ФАЗИРОВАННОЙ АНТЕННОЙ РЕШЕТКОЙ | 2023 |
|
RU2832238C1 |
Изобретение относится к АСУ ТП и может быть использовано для управления электролизом алюминия. Технический результат: расширение функциональных возможностей и улучшение эксплуатационных характеристик при снижении объема и стоимости аппаратуры, повышение технико-экономических показателей, снижение габаритно-массовых характеристик за счет исключения избыточности, сокращение затрат на установку и монтаж, повышение срока службы. Существо изобретения: предложена распределенная автоматизированная система управления электролизом алюминия, содержащая многотерминальный пульт управления и специализированные контроллеры, объединенные локальной вычислительной сетью. Многотерминальный пульт управления содержит один пульт оператора, N пультов технологов, сервер базы данных и усилитель низкой частоты. Кроме того, АСУ содержит концентратор вычислительной системы, контроллеры группы, контроллеры управления приводом, контроллер преобразования тока, контроллер преобразования напряжения, контроллеры отображения и сигнализации, контроллер технологический переносной. 1 с. и 7 з.п. ф-лы, 8 ил.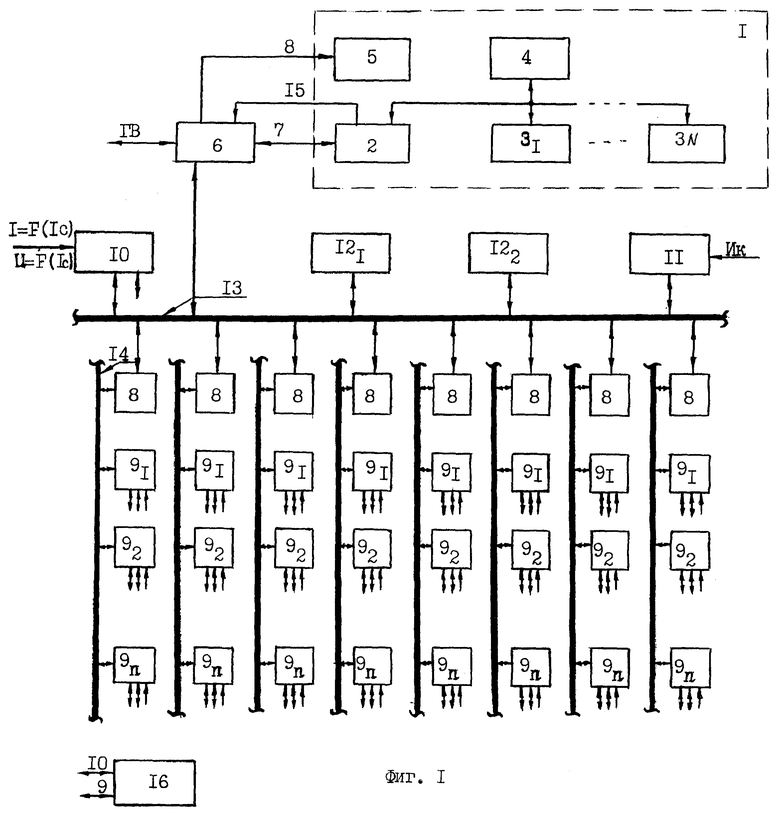
контроллеров управления приводом в каждой группе, причем каждый контроллер управления приводом установлен непосредственно на электролизере, первый информационный вход-выход с каждого контроллера группы подключен к сегменту локальной вычислительной сети верхнего уровня, а второй, информационный вход-выход - к групповому сегменту локальной вычислительной сети, аналоговый вход каждого контроллера управления приводом подключен к аноду и катоду электролизера, каждый контроллер управления приводом снабжен технологическим входом-выходом для подключения контроллера технологического переносного, контроллер преобразования тока информационным входом-выходом соединен с сегментом локальной вычислительной сети верхнего уровня, а аналоговым входом - с датчиком тока серии, кроме того, контроллер преобразования тока снабжен технологическим входом-выходом для подключения к контроллеру технологическому переносному, аналоговый вход контроллера преобразования напряжения соединен с анодом и катодом первого электролизера в каждой группе и анодом и катодом n-электролизера в серии, информационный вход-выход контроллера преобразования напряжения соединен с сегментом локальной вычислительной сети верхнего уровня, информационные входы-выходы первого и второго контроллеров отображения и сигнализации также подключены к сегменту локальной вычислительной сети верхнего уровня.
| ХАЗАРАДЗЕ Т | |||
| Система автоматизации процесса производства алюминия | |||
| Современные технологии автоматизации | |||
| Электрическое сопротивление для нагревательных приборов и нагревательный элемент для этих приборов | 1922 |
|
SU1997A1 |
| Приспособление для разматывания лент с семенами при укладке их в почву | 1922 |
|
SU56A1 |
| СПОСОБ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ АЛЮМИНИЕВОГО ЭЛЕКТРОЛИЗЕРА | 1994 |
|
RU2062822C1 |
| ФУРМЕННОЕ УСТРОЙСТВО ДЛЯ ПОДАЧИ ГАЗОВ В ТЕПЛОВОЙ АГРЕГАТ И СПОСОБ ЕГО МОНТАЖА | 2003 |
|
RU2244019C1 |
| US 4638441, 20.06.1987 | |||
| Способ получения полимеров винилацетилена | 1982 |
|
SU1065427A1 |

