Изобретение относится к цветной металлургии и может быть использовано для управления процессами получения алюминия из глинозема электролитическим методом.
Известно, что для эффективного управления процессом электролиза необходима стабилизация энергетического режима (силы и плотности тока), температуры, межполюсного расстояния, состава электролита, уровня металла и др. параметров. Неточное управление приводит к перерасходу электроэнергии, снижению качества металла и производительности электролизера, росту числа анодных эффектов (см., например, Кадричев В.П., Минцис М.Я., "Измерение и оптимизация параметров алюминиевых электролизеров", Челябинск, Металл, 1995) [1] . Решение указанных проблем возможно с использованием современных вычислительных средств и элементной базы (см., например, Пауш Г., Система автоматизации электролиза алюминия. Концепция "ALUMAT"// "Алюминий Сибири-96": Труды междунар. научного семинара; Краснояр. гос. ун-т. Красноярск, 1997) [2].
Способ управления процессом электролиза существенно отличается для электролизеров, оборудованных системой автоматизированной подачи глинозема (АПГ) и электролизеров без системы АПГ, в которых подача глинозема осуществляется периодическими обработками.
Для электролизеров без систем АПГ известен способ управления, основанный на измерении напряжения на электролизере, тока серии электролизеров и расчете текущих значений сопротивления электролизера, а также определении перед каждой очередной загрузкой минимального значения сопротивления или приведенного напряжения. При этом минимальное значение приведенного напряжения принимают за уставку, а анод перемещают при наличии рассогласования между уставкой и текущим значением приведенного напряжения, фиксируют все перемещения между обработками электролизера. При наличии преимущественных перемещений анода вниз принимают заниженное значение концентрации глинозема, вверх - завышенное значение концентрации, редких перемещений непосредственно после обработки и перед очередной - нормальную концентрацию. При повышенном и пониженном значениях концентрации корректируют режим загрузки глинозема для достижения нормального концентрационного режима (RU 2148108 С1, "Союзцветметавтоматика", С 25 С 3/20, 27.04.2000) [3].
Для электролизеров, оборудованных системой АПГ, известен способ управления, заключающийся в поддержании температурного режима электролизера путем регулирования межполюсного расстояния и концентрации глинозема в заданных пределах чередованием избыточного и недостаточного режимов питания. Способ включает измерение напряжения на электролизере и тока серии, расчет текущего значения приведенного напряжения Unp и скорости его изменения во времени dUnp/dt, сравнении вычисленных значений с заданными и принятие решений о регулировании межполюсного расстояния и переходе к избыточному или недостаточному режимам питания глиноземом по результатам сравнения (SU 1724713 А1, "Союзцветметавтоматика", С 25 С 3/20, 07.04.1992 [4]; RU 2113552 C1, Братский алюминиевый завод, С 25 С 3/20, 20.06.1998 [5] - ближайший аналог первого объекта группы изобретений).
Способы [4, 5] позволяют поддерживать концентрацию глинозема в электролите в технологически оптимальном диапазоне 2-5%, однако при применении этих способов критерии выбора режима питания - заданное время избыточного питания и максимальное напряжение недостаточного питания - не обеспечивают необходимой точности поддержания концентрации, оценка концентрации по регрессивной модели и по максимальному значению dUnp/dt в способе [4] используются как дополнительные. В способе [5] используется лишь грубая оценка dUnp/dt (положительная/отрицательная), что, по-видимому, обусловлено недостаточной мощностью вычислительных средств для их точного и своевременного расчета.
Известен блок управления по меньшей мере одним электролизером, содержащим привод перемещения анода, привод пробойника, привод питателя. Блок управления содержит средства для измерения падения напряжения и тока, подключенные к ошиновкам анода и катода электролизера и к блоку обработки сигналов, снабженному вычислителем и связанному с исполнительными устройствами (US 4035251, Shiver et al. 204/67, C 25 C 3/12, 3/14, 10.06.1975) [6]. Устройство имеет возможность предотвратить последствия возникновения анодного эффекта путем вычисления текущего электрического cопротивления, сравнения его с установленными пороговыми значениями и последующего регулирования зазора "анод - катод" с подачей питания под корку.
Известно также устройство управления электролизерами, содержащее подключенные к анодной и катодной ошиновкам измерители напряжения и силы тока, присоединенные к входам вычислительного блока. Ко входам этого устройства также присоединен датчик количества подаваемого глинозема (сигнал о срабатывании дозатора глинозема с известным объемом дозы). Выходы измерителей соединены с входами вычислительного блока, реализующего математическую модель электролизера. К одному из выходов вычислительного блока подключен блок определения заданного значения глинозема в расплаве с соответствующими задатчиками предельных значений. Выходы вычислительного блока через блоки сравнения с соответствующими задатчиками подключены к регуляторам и приводам перемещения анодного массива и изменения частоты подачи заданных порций глинозема (RU 2023058 С1, Вс. НИиПИ алюминиевой, магниевой и электродной промышленности, С 25 С 3/20, 7/06, 15.11.1994) [7] - ближайший аналог второго объекта группы изобретений. Блок реализует способ управления электролизерами, который включает измерения напряжения и силы тока, количества загружаемого глинозема, измерение приращений этих величин, определение с помощью математической модели межполюсного расстояния, температуры электролита и концентрации глинозема в расплаве в зависимости от отклонения межполюсного расстояния от заданного значения с коррекцией по температуре, а также изменение частоты подачи порций глинозема в зависимости от отклонения концентрации глинозема от заданного значения. Последнее изменяют в зависимости от измеренного значения концентрации, а коэффициенты математической модели корректируют в зависимости от измеренного значения концентрации при анодных эффектах. Изобретение позволяет стабилизировать энергетический и концентрационный режимы работы, повысить выход по току, уменьшить частоту анодных эффектов. Однако, сложная расчетная модель, описанная в способе [7], реализуемая этим блоком, недостаточно адаптируема к реальным колебаниям технологических параметров в реальных промышленных условиях при существующем уровне мощности вычислительных средств.
Целью патентуемой группы изобретений является устранение отмеченных недостатков, а именно, повышение качества управления электролизерами, снабженными системами АПГ, что и является техническим результатом изобретения.
Технический результат первого объекта группы изобретений обеспечивается тем, что способ управления электролизерами для получения алюминия, заключающийся в поддержании температурного режима электролизера путем регулирования межполюсного расстояния и концентрации глинозема в заданных пределах чередованием режимов избыточного и недостаточного питания, включает измерение напряжения на электролизере и тока серии, расчет текущего значения приведенного напряжения Unp и скорости его изменения во времени dUnp/dt, сравнение вычисленных значений с заданными и принятие решений о регулировании межполюсного расстояния и переходе к режимам избыточного или недостаточного питания глиноземом по результатам сравнения. Переход от режима недостаточного питания к режиму избыточного питания осуществляют при достижении скорости изменения приведенного напряжения во времени величины dUnp/dt>G1, переход от режима избыточного питания к режиму недостаточного питания осуществляют при достижении скорости изменения приведенного напряжения во времени величины dUnp/dt<G2, где G1, G2 - пороговые значения скорости изменения приведенного напряжения, определенные экспериментально. При этом регулирование межполюсного расстояния проводят в момент перехода от режима избыточного питания к режиму недостаточного питания при условии
/Uпр-U0/>ΔU,
где U0 - номинальное значение приведенного напряжения, ΔU - заданная технологическими требованиями зона нечувствительности.
Способ может характеризоваться тем, что в режиме недостаточного питания при скорости изменения приведенного напряжения во времени dUnp/dt<0 подачу глинозема не производят.
Способ может характеризоваться тем, что в момент перехода от режима недостаточного питания к режиму избыточного питания единовременно вводят дополнительное количество глинозема, составляющее преимущественно 3-5 порций, формируемых системой автоматизированной подачи глинозема.
Технический результат второго объекта группы изобретений обеспечивается тем, что устройство управления электролизерами включает блоки измерения тока серии и напряжения, подключенные ко входам вычислительного устройства, выходы которого подключены к блокам регулирования межполюсного расстояния с исполнительными устройствами, и системе автоматизированной подачи глинозема с исполнительными устройствами, блок сравнения, задатчики уровня, электроприводы. Вычислительное устройство содержит соединенные между собой внутренней шиной (230) блок (210) вычисления приведенного напряжения, блок (211) вычисления производной приведенного напряжения, драйвер (212) локальной вычислительной сети, блок (216) анализа нештатных ситуаций, блок (218) поддержания концентрации, блок (220) поддержания межполюсного расстояния, блок (222) сопровождения регламентных операций, блок (224) обнаружения и гашения магнитогидродинамической нестабильности, блок (226) сопровождения обработки, блок (228) сопровождения анодных эффектов и последовательный порт (214), связанный через шину (254) управления с блоком (256) индикации, клавиатурой (258) ввода данных, внешними устройствами и датчиками. Введены блок (288) системы внутреннего питания и блок (286) автоматического включения резерва, один из выходов (287) которого подключен к блоку (288) системы внутреннего питания, а другой - к одному из входов (294) блока (216) анализа нештатных ситуаций. Блок измерения напряжения содержит блок (232) нормирования аналогового сигнала, вход которого подключен к анодной (12) и катодной (14) ошиновкам и параллельно ко входам (302, 304) блока независимой сигнализации анодного эффекта, а его выход - ко входу блока (234) аналого-цифрового преобразования, выход которого связан с блоком (210) вычисления приведенного напряжения. Блок (34) измерения тока серии подключен через адаптер (248) к драйверу (212) локальной вычислительной сети, концевые выключатели (22, 24) анодной рамы подключены ко входу блока (216) анализа нештатных ситуаций, один из выходов (240) которого является клеммой для подключения устройства отключения группового контактора. Выход блока (218) поддержания концентрации, и одни из выходов блоков (222) сопровождения регламентных операций, (224) обнаружения и гашения магнитогидродинамической нестабильности, (226) сопровождения обработки, (228) сопровождения анодных эффектов подключены через гальваническую развязку (262) к исполнительным устройствам системы (18) автоматизированной подачи глинозема. Выход блока (220) поддержания межполюсного расстояния и другие выходы блоков (222) сопровождения регламентных операций, (224) обнаружения и гашения магнитогидродинамической нестабильности, (226) сопровождения обработки, (228) сопровождения анодных эффектов подключены через гальваническую развязку (264) к входу (266) управления блока (268) реверсивных пускателей, силовой вход (270) которого подключен к выходу блока (272) автоматических выключателей, подключенных к силовой трехфазной сети (шиной 3), а силовые выходы (Х15-X18) блока (268) реверсивных пускателей подключены к электроприводам домкратов анода (26, 28) и кожуха (30, 32), а силовой выход (245) блока сопровождения анодных эффектов подключен к шине 7 групповой сигнализации анодного эффекта. Сигнальный выход (274) блока (268) реверсивных пускателей подключен к входу блока 276 контроля токов двигателей электроприводов домкратов анода (26, 28) и кожуха (30, 32), который через последовательный порт (278) связан с шиной (254) управления, при этом блок (276) контроля токов двигателей связан со входом (282) отключения блока (272) автоматических выключателей, к которому также подключен другой выход (284) блока (216) анализа нештатных ситуаций.
Устройство может характеризоваться также тем, что блок (300) независимой сигнализации анодного эффекта включает блок (308) нормирования аналогового сигнала, входы (302, 304) которого являются входами блока, к которым также подключен блок (316) формирования напряжения питания для контура (318) внутреннего питания блока, выход блока (308) нормирования аналогового сигнала подключен к блоку (310) аналого-цифрового преобразования, выход которого подключен к одному из входов блока (312) сравнения, а к другому входу - выход блока 314 задатчика уровня, а выход блока (312) сравнения является выходом блока.
Устройство может, кроме того, характеризоваться тем, что блок (234) аналого-цифрового преобразования, концевые выключатели (22, 24) анодной рамы, выход блока (216) анализа нештатных ситуаций для подключения устройства отключения группового контактора, силовой выход (245) блока (228) сопровождения анодных эффектов подключены к соответствующим блокам через гальванические развязки (236, 238, 244, 246).
Устройство может характеризоваться также тем, что локальная вычислительная сеть организована по стандарту ArcNet, при этом адаптер (248) подключен к упомянутой сети через гальванически развязанный конвертер (252).
Устройство может характеризоваться тем, что шина (254) управления организована по стандарту интерфейса RS-485.
Устройство может характеризоваться также тем, что внешние устройства и датчики подключены к шине (254) управления через гальванически развязанный преобразователь (260) скорости передачи данных интерфейса RS-485. Сущность изобретения поясняется на чертежах, где:
на фиг.1 представлена структурная схема устройства управления двумя электролизерами;
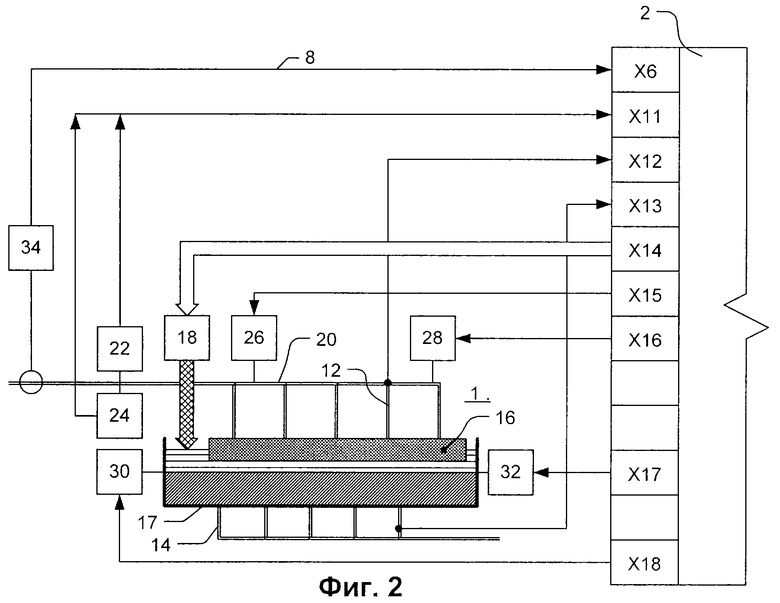
на фиг.2 - структурная схема подключения одного из электролизеров к блоку управления;
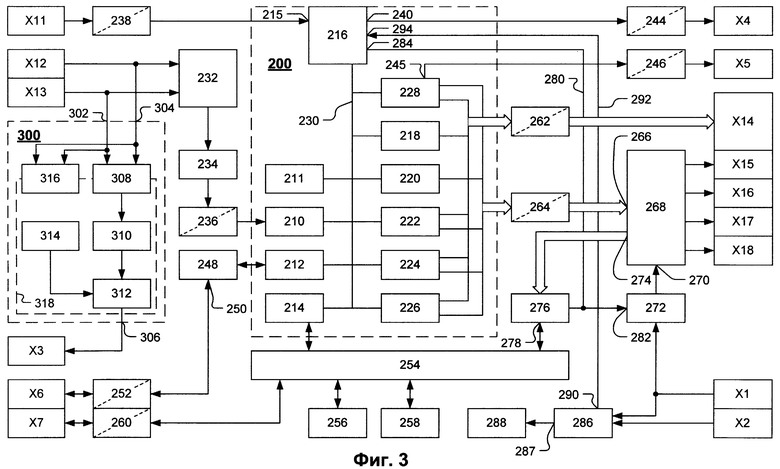
на фиг.3 - функциональная схема блока управления электролизерами;
на фиг.4 - зависимость Unp (С) к пояснению принципа регулирования;
на фиг.5 - графики зависимостей Unp и dUnp/dt от времени;
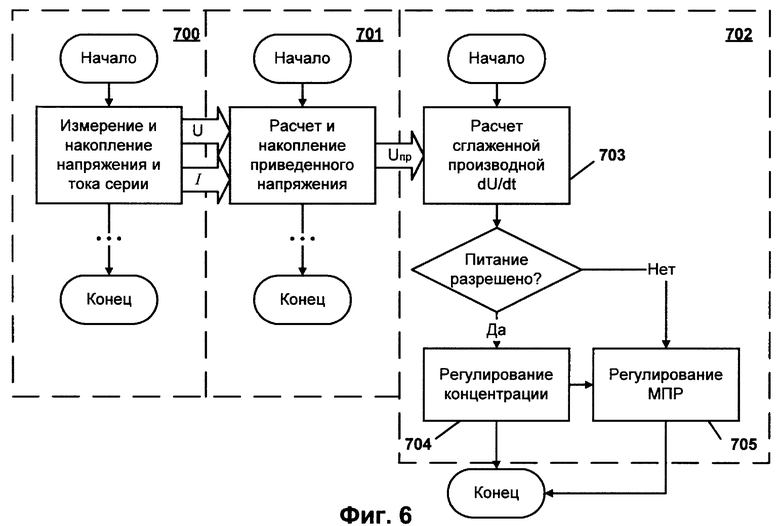
на фиг.6 и 7 - алгоритм реализации способа в устройстве управления.
Два электролизера 1 (см. фиг.1) управляются и обслуживаются блоком 2 управления, который функционально обособлен и выполнен в виде единого конструктивного элемента - приборного шкафа. Блок 2 подключен: к силовой трехфазной сети - шиной 3, к двухфазной сети - шиной 4, к блоку независимой сигнализации анодного эффекта - шиной 5, к устройству отключения группового контактора - шиной 6, к блоку групповой сигнализации анодного эффекта - шиной 7, к локальной вычислительной сети (ЛВС) - шиной 8, к внешним устройствам и датчикам - шиной 9.
На фиг. 2 показана структурная схема подключения электролизера 1 к блоку 2 управления.
Каждый электролизер 1 имеет анодную 12 и катодную 14 ошиновки, подключенные соответственно к угольному аноду 16 и катоду 17. Падение напряжения на электролизере регистрируется между ошиновками 12, 14 и подается на входные клеммники Х12, Х13 блока 2. На электролизере также установлены исполнительные устройства системы 18 АПГ. Управление системой 18 АПГ осуществляется с выходного клеммника Х14 блока 2. На анодной раме 20 размещены концевые выключатели 22, 24, соединенные с входным клеммником XII блока 2 и предназначенные для сигнализации крайних положений анодной рамы при ее перемещениях.
Электролизер также имеет электроприводы 26, 28 домкратов анода, а также электроприводы 30, 32 домкратов кожуха, управление которыми осуществляется с выходных клеммников X15-Х18 блока 2. Серия электролизеров снабжена измерителем 34 тока серии, выход которого через шину 8 ЛВС стандарта ArcNet подключен к клемме Х6 блока 2 управления.
На фиг. 3 показана функциональная схема блока управления электролизерами. Для удобства изложения блоки и связи, одинаковые для двух электролизеров, не показаны.
Основой блока 2 управления является вычислительное устройство 200, состоящее из следующих функциональных блоков: блока 210 вычисления приведенного напряжения Unp, блока 211 вычисления производной приведенного напряжения dUnp/dt, драйвера 212 ЛВС стандарта ArcNet, последовательного порта 214 с интерфейсом RS-485, блока 216 анализа нештатных ситуаций. Кроме того, вычислительное устройство 200 включает блок 218 поддержания концентрации, блок 220 поддержания межполюсного расстояния (МПР), блок 222 сопровождения регламентных операций, блок 224 обнаружения и гашения магнитогидродинамической (МГД) нестабильности, блок 226 сопровождения обработки, блок 228 сопровождения анодных эффектов (АЭ).
Все функциональные блоки 210 - 228, входящие в состав вычислительного устройства 200, объединены между собой внутренней шиной 230.
К входным клеммам X12, Х13 блока управления подключены входы блока 232 нормирования аналогового сигнала; выход блока 232 подключен к блоку 234 аналого-цифрового преобразования. Выход блока 234 через гальваническую развязку 236 подключен к блоку 210 вычисления приведенного напряжения Unp. Блок 211 вычисления производной приведенного напряжения dUnp/dt входит в состав блока 200 и обменивается данными с другими блоками по внутренней шине 230.
К входному клеммнику Х11 блока управления через гальваническую развязку 238 подключен вход 215 блока 216 анализа нештатных ситуаций. Выход 240 блока 216 подключен через гальваническую развязку 244 к выходной клемме Х4 блока 2 управления. Выход 245 блока 228 через гальваническую развязку 246 подключен к выходной клемме Х5 блока 2 управления.
Вычислительное устройство 200 через драйвер 212 ЛВС ArcNet связано с адаптером 248 ЛВС ArcNet, подключенным коаксиальным кабелем 250 к конвертеру 252 волоконно-оптической линии связи, который подключен к клемме Х6 блока 2 управления. Использование ЛВС ArcNet позволяет обеспечить гарантированное время доставки текущего значения тока серии электролизеров к вычислительному устройству 200.
Вычислительное устройство 200 через последовательный порт 214 связано с шиной 254 управления, организованной по стандарту интерфейса RS-485. К шине 254 управления подключены блок 256 индикации и клавиатура 258 ввода данных. Кроме того, к шине 254 управления через гальванически развязанный преобразователь 260 скорости передачи данных подключен порт Х7 для внешних устройств (датчиков физико-химических параметров процесса электролиза и других средств контроля). Преобразователь 260 представляет собой буфер памяти с двумя портами. Первый порт связан с шиной 254 управления па скорости 115200 бит/сек. Второй порт связан с внешними устройствами и работает на более низкой скорости. Это обеспечивает функционирование внешних устройств в условиях сильных электромагнитных помех без снижения скорости работы шины 254 управления.
Выходы блоков 218, 222-228 вычислительного устройства 200 подключены через гальваническую развязку 262 к выходному клеммнику X14 блока управления.
Другие выходы блоков 220-228 вычислительного устройства 200 подключены через гальваническую развязку 264 к входу 266 управления блока 268 реверсивных пускателей. Силовой вход 270 блока 268 подключен к выходу блока 272 автоматических выключателей, подключенных к силовому клеммнику X1 блока управления. Силовые выходы блока 268 подключены к выходным клеммам X15-Х18 блока 2 управления.
Сигнальный выход 274 блока 268 реверсивных пускателей подключен к входу блока 276 контроля токов двигателей, который через последовательный порт 278 связан с шиной 254. Кроме того, блок 276 контроля токов двигателей связан по шине 280 со входом 282 отключения блока 272 автоматических выключателей. С входом 282 также связан выход 284 блока 216 анализа нештатных ситуаций.
К клеммам X1, Х2 блока управления подключен блок 286 автоматического включения резерва (АВР), выход 287 которого подключен к блоку 288 системы внутреннего питания блока 2 управления. Выход 290 блока 286 подключен через шину 292 к входу 294 блока 216.
К входным клеммам X12, Х13 блока 2 управления подключены входы 302, 304 блока 300 независимой сигнализации анодного эффекта, выход 306 которого подключен к выходной клемме Х3 блока 2 управления. Входы 302, 304 подключены к блоку 308 нормирования аналогового сигнала, выход которого подключен к входу блока 310 аналого-цифрового преобразования (АЦП). Выход блока 310 АЦП подключен к одному из входов блока 312 устройства сравнения. Другой вход блока 312 подключен к выходу блока 314 задатчика уровня. Выход блока 312 устройства сравнения подключен к выходу 306, являющемуся выходом блока 300.
К входам 302, 304 также подключен блок 316 формирования напряжения питания для контура 318 внутреннего питания блока 300.
Способ реализуют следующим образом (см. фиг.4-7).
Управление электролизером посредством блока управления осуществляют в рабочем режиме его функционирования. Программа управления реализована в виде независимых, асинхронно выполняемых модулей (пп.700, 701, 702). В модуле (п. 700) (см. фиг. 6), выполняемом с частотой 18,2 Гц, проводят измерение напряжения U на электролизере и измерение тока I серии. В модуле (п.701), выполняемом с частотой 1 Гц, проводят расчет среднего за 1 сек значения приведенного напряжения Unp на основании данных модуля (п. 700).
В модуле (п.702), выполняемом с частотой 1/60 Гц, осуществляется расчет величины производной сглаженного приведенного напряжения во времени dUnp/dt (п. 703). Под сглаженным напряжением имеется в виду осреднение приведенного напряжения Unp и его производной dUnp/dt каждую минуту за временной промежуток не менее 10 минут.
Управление электролизером осуществляют по двум каналам: регулированием концентрации глинозема за счет изменения частоты срабатывания механизмов системы АПГ (п. 704) и регулированием межполюсного расстояния перемещением анода вверх/вниз (п. 705).
Регулирование концентрации глинозема (п.704) (фиг.6) ведется в зависимости от режима питания (п.7041) (фиг.7). Принципы, лежащие в основе алгоритма управления, поясняются на графиках (см. фиг.4-5).
При режиме недостаточного питания ("редкий" режим работы АПГ) значение производной dUnp/dt увеличивается (участок "а"). При достижении верхнего порогового значения dUnp/dt>G1 (п.7042), включается режим избыточного питания ("частый" режим работы АПГ) (п.7043) - поз "b". Значение dUnр/dt начинает уменьшаться (участок "с"). При достижении нижнего порогового значения dUnp/dt<G2 (п.7044), включается режим недостаточного питания (п.7045) - поз. "d".
В этот же момент времени "d" может производиться также, при необходимости, регулирование межполюсного расстояния перемещением анода вверх/вниз (п. 705) (фиг. 6). Для этого производится сравнение значения среднего приведенного напряжения Uпр с номинальным значением U0. В том случае, если Uпр>U0+ΔU (п.7051) (фиг.7), то производится уменьшение МПР путем перемещения анода вниз (п. 7052) (поз. "е"). Если Uпр<U0-ΔU (п.7053), то производится увеличение МПР путем перемещения анода вверх (п. 7054) (поз. "f"). Величина ΔU - зона нечувствительности, задается технологическими требованиями.
При больших концентрациях С глинозема в электролите (правая ветвь зависимости Unp(C) (см. график на фиг. 4) в режиме недостаточного питания приведенное напряжение будет уменьшаться, т.е. dUnp/dt<0. При этом целесообразно прекратить подачу глинозема для ускорения снижения концентрации глинозема в электролите.
После режима недостаточного питания необходимо быстро увеличить концентрацию глинозема в электролите, так как при низких концентрациях глинозема вероятно возникновение анодных эффектов. Для этого целесообразно в момент перехода от режима недостаточного питания к режиму избыточного питания осуществить единовременное введение в электролизер дополнительного количества глинозема, составляющего несколько обычных порций, преимущественно 3-5, выдаваемых системой АПГ.
Блок управления электролизерами, реализующий патентуемый способ управления, функционирует следующим образом.
Напряжение между анодной 12 и катодной 14 ошиновками (Uраб) через входные клеммы X12, X14 поступает на вход блока 232.
Блок 232 нормирования аналогового сигнала представляет собой двухканальный делитель-ограничитель, имеющий пассивные каналы с разными коэффициентами передачи. Первый канал имеет коэффициент передачи К=1 в диапазоне входных напряжений 0-10 В. В диапазоне входных напряжений 10-100 В входной сигнал в первом канале ограничивается на уровне 10 В. Второй канал имеет коэффициент передачи К=0,1 в диапазоне входных напряжений 0-100 В.
В том случае, если Upaб<10 В, то оно поступает по первому каналу на выход блока 232 без изменений. Если же Uраб>10 В, то оно ограничивается в первом канале на уровне 10 В, а на выход блока 232 поступает значение, равное 0,1 Upaб, и в этом случае измерение ведется по второму каналу с учетом коэффициента передачи К=0,1.
Далее, нормированное значение Upaб поступает на вход двухканального блока 234 аналого-цифрового преобразования. Первый канал производит измерение входного напряжения в диапазоне 0-10 В, а второй - в диапазоне 10-100 В. Далее, через гальваническую развязку 236 значение рабочего напряжения в цифровой форме поступает на обработку в блок 210 вычисления приведенного напряжения Unp.
В блоке 210 производится усреднение значений рабочего напряжения электролизера на интервале 1 секунда (модуль 700 - см. фиг. 6) и вычисление приведенного напряжения Unp (модуль 701). Для реализации модуля 701 требуется значение тока I серии, измеренное одновременно с Upaб. Значение тока I измеряется в блоке 34 (фиг. 2) и поступает в блок 210 через входную клемму Х6, конвертер 252, адаптер 248, драйвер 212 и через внутреннюю шину 230.
Таким образом, формируется усредненное за 1 сек значение приведенного напряжения Unp, которое используется при вычислениях в модуле 702. Значение Unp через последовательный порт 214 и шину 254 управления поступает в блок 256 индикации для визуального контроля обслуживающим персоналом.
Расчет сглаженной производной приведенного напряжения dUnp/dt (модуль 703) производится в блоке 211 на основе данных блока 210, переданных по шине 230. Значение dUnp/dt поступает по шине 230 на вход блока 218 поддержания концентрации, который реализует модуль 704. Результатом работы модулей 7043 и 7045 является подача управляющих сигналов через гальваническую развязку 262 и выходной клеммник Х14 на исполнительные механизмы системы 18 АПГ (фиг. 2).
Блок 218 в случае необходимости обращается по шине 230 к блоку 220 поддержания МПР, который реализует модуль 705. Результатом работы модулей 7052 и 7054 является подача управляющих сигналов через гальваническую развязку 264 на вход 266 блока 268 реверсивных пускателей, который через выходные клеммники X15-X16 включает подачу двигателей 26, 28 анодной рамы 20 вверх или вниз (фиг.2). Таким образом осуществляется автоматическое управление процессом электролиза на двух электролизерах.
Кроме этого, блок 200 управляет ходом выполнения ряда других операций, необходимых при обслуживании электролизеров.
Для сопровождения регламентных операций на электролизере, таких как: выливка металла, перетяжка анодной рамы, перестановка или переключение анодных штырей или замена анода, выравнивание анодной рамы или кожуха, - предназначен блок 222 сопровождения регламентных операций. Начало регламентной операции определяется оператором в момент нажатия соответствующей клавиши на клавиатуре 258. Сигнал с клавиатуры 258 через шину 254 управления, последовательный порт 214 и внутреннюю шину 230 передается в блок 222. В соответствии с поступившей командой блок 222 выполняет действия по сопровождению той или иной из вышеназванных регламентных операций. Например, отключает автоматическое регулирование концентрации глинозема (п.704) и автоматическое регулирование МПР (п.705).
Блок 224 обнаружения и гашения МГД-нестабильности получает значение Unp по шине 230 от блока 210. В блоке 224 происходит выделение колебаний напряжения Unp заданной частоты и анализируется амплитуда этих колебаний в течение заданного промежутка времени. Если она превышает минимальное заданное значение, то алгоритм гашения МГД-нестабильности отключает регулирование концентрации (п.704) и увеличивает U0 на заданную величину δU. Эта величина δU может задаваться либо фиксированно, либо быть равна текущему значению амплитуды МГД-нестабильности. Поскольку регулирование МПР (п.705) продолжает работать, то в связи с увеличением уставки U0 увеличивается и МПР, вследствие чего МГД-нестабильность устраняется. После исчезновения вышеописанных колебаний блок 224 включает регулирование концентрации глинозема и возвращает значение уставки U0 на прежний уровень.
В том случае, когда на электролизере проводятся технологические операции обработки (см. Справочник металлурга по цветным металлам. Производство алюминия, Изд-во "Металлургия", М., 1971, гл. 1У, с. 266-301) [8], то по команде оператора с клавиатуры 258 через шину 254, последовательный порт 214 и шину 230 сигнал передается в блок 226 сопровождения обработки. Блок 226 отключает регулирование концентрации (п.704) и увеличивает значение U0 на заданную величину, что приводит к увеличению значения МПР на электролизере. Последнее способствует увеличению температуры, которое компенсирует охлаждение электролита, произошедшее вследствие введения холодного глинозема при обработке. По окончании процесса сопровождения обработки блок 226 уменьшает значение U0 до прежнего уровня и восстанавливает регулирование концентрации глинозема.
Блок 228 сопровождения АЭ определяет прогноз возникновения АЭ по значению dUnp/dt, полученному из блока 211 по шине 230. Также блок 228 определяет наступление АЭ по значению Uпр, полученному из блока 210 по шине 230, при этом сигнал о возникновении АЭ через гальваническую развязку 246 и выходную клемму Х5 поступает на шину 7 групповой сигнализации анодного эффекта.
В режиме прогноза АЭ или собственно в процессе действия АЭ блок 228 запрещает работу блоков 218 и 220 и сам управляет механизмами АПГ через гальваническую развязку 262 и клеммник X14, а также двигателями электроприводов 26, 28 анодной рамы через гальваническую развязку 264 и блок 268 пускателей.
Аналоговые сигналы, соответствующие наличию токов в фазах двигателей, поступают с сигнального выхода 274 блока 268 пускателей на вход блока 276 контроля токов двигателей. В блоке 276 производится анализ величин токов. Через последовательный порт 278, шину 254 и последовательный порт 214 значения токов двигателей поступают в блок 216 анализа нештатных ситуаций. В случае, если величины токов двигателей находятся в недопустимых пределах, или отсутствует хотя бы одна фаза, или при отсутствии управляющих сигналов на входе 266 показано наличие тока в двигателях, блок 216 по шине 280 направляет сигнал на вход 282 отключения блока 272 автоматических выключателей. В результате этого обеспечивается отключение блока 2 управления от шины 3, чем исключается возникновение аварийной ситуации - несанкционированного срабатывания электроприводов 26, 28, 30, 32 домкратов анодной рамы или кожуха. В том случае, если блок 2 не отключился от шины 3, блок 216 анализа нештатных ситуаций через гальваническую развязку 244 и выходную клемму Х4 формирует сигнал для устройства отключения группового контактора.
В процессе работы электролизера возможно возникновение нештатных ситуаций различного рода, которые также обрабатывает блок 216. Положение анодной рамы 20 в заданных пределах проверяется посредством сигналов с концевых выключателей 22, 24. В том случае, если анодная рама достигает крайнего верхнего положения, замыкается концевой выключатель 22, а если она достигает крайнего нижнего положения, замыкается концевой выключатель 24. Сигнал о срабатывании соответствующего концевого выключателя поступает через входной клеммник X11 и гальваническую развязку 238 в блок 216 анализа нештатных ситуаций.
Если анодная рама 20 находится в крайнем верхнем положении, блок 216 выдает запрет на ее подачу вверх, если же анодная рама находится в крайнем нижнем положении - на подачу анодной рамы вниз.
В случае отсутствия напряжения питания в шине 4, блок 286 АВР автоматически подключает две фазы из шины 3 к блоку 288 системы внутреннего питания блока 2 управления. При этом сигнал о переходе на резервное питание по шине 292 передается в блок 216, который передает соответствующее сообщение оператору через шину 230, адаптер 212, блок 248 адаптера ЛВС ArcNet, конвертер 252 волоконно-оптической линии связи и выходную клемму Х6.
В случае возникновения короткого замыкания (КЗ) на силовых выходах блока 268 реверсивных пускателей, сигнал об этом через сигнальный выход 274 попадает на вход блока 276 контроля токов двигателей, а он, в свою очередь, через шину 280 посылает сигнал отключения на вход 282 блока 272 автоматических выключателей, что приводит к отключению шины 3, подключенной к клемме X1 от блока 268.
Отсутствие связи через ЛВС ArcNet приводит к отсутствию значений тока серии I при расчете значения Uпр в блоке 210. Отсутствие связи фиксируется в блоке 216, и для всех блоков вычислительного устройства 200 по шине 230 рассылается соответствующее оповещение. В этом случае все действия вычислительного устройства 200 ведутся по значениям измеренного напряжения Upaб вместо Unp.
Все действия блока 216 сопровождаются звуковыми сообщениями, сгенерированными речевым автоматом и предназначенными для извещения персонала о наступлении нештатной ситуации на электролизере.
Блок 300 независимой сигнализации АЭ (см. фиг.3) функционирует следующим образом.
Блок 316 формирования напряжения питания - ограничитель-стабилизатор, формирующий питание для всех элементов блока 300 из поступающего на входы 302, 304 напряжения электролизера. Со входов 302, 304 напряжение электролизера поступает на блок 308 нормирования аналогового сигнала, который выполнен по схеме делителя-ограничителя и ограничивает сигнал на входе блока 310 АЦП на уровне опорного напряжения АЦП. Блок 310 преобразует входной сигнал в цифровую форму и подает это значение на вход блока 312 устройства сравнения. Если это значение становится равным или большим, чем установленное в блоке 314 задатчика уровня, то блок 312 вырабатывает сигнал о наступлении АЭ и передает его на выход 306.
Промышленная применимость. Вычислительное устройство блока управления может быть реализовано на базе процессора Intel 386 SX и выше с использованием стандартных средств программирования для IBM PC. Использован адаптер сети ArcNet в виде платы с шиной ISA; АЦП - 12-разрядное, выполненное в модульном исполнении. Остальные элементы блока управления представляют собой стандартные элементы автоматики.



Изобретение относится к цветной металлургии и может быть использовано для управления процессами получения алюминия из глинозема электролитическим методом. Технический результат: повышение качества управления электролизерами, снабженными системами АПГ. Способ управления электролизерами для получения алюминия заключается в поддержании температурного режима электролизера путем регулирования межполюсного расстояния и концентрации глинозема в заданных пределах чередованием режимов избыточного и недостаточного питания и включает измерение напряжения на электролизере и тока серии, расчет текущего значения приведенного напряжения Uпр и скорости его изменения во времени dUпр/dt, сравнение вычисленных значений с заданными и принятие решений о регулировании межполюсного расстояния и переходе к режимам избыточного или недостаточного питания глиноземом по результатам сравнения. Переход от режима недостаточного питания к режиму избыточного питания осуществляют при достижении скорости изменения приведенного напряжения во времени величины dUпр/dt > G1, переход от режима избыточного питания к режиму недостаточного питания осуществляют при достижении скорости изменения приведенного напряжения во времени величины dUпр/dt <G2, где G1, G2 - пороговые значения скорости изменения приведенного напряжения, определенные экспериментально. При этом регулирование межполюсного расстояния проводят в момент перехода от режима избыточного питания к режиму недостаточного питания при условии /Uпр-U0/>ΔU, где U0 - номинальное значение приведенного напряжения, ΔU - заданная технологическими требованиями зона нечувствительности. Приводится функциональная схема устройства. 2 с. и 7 з.п. ф-лы, 7 ил.
/Uпр-U0/>ΔU,
где U0 - номинальное значение приведенного напряжения, ΔU - заданная технологическими требованиями зона нечувствительности.
| СПОСОБ УПРАВЛЕНИЯ ТЕХНОЛОГИЧЕСКИМ ПРОЦЕССОМ В АЛЮМИНИЕВОМ ЭЛЕКТРОЛИЗЕРЕ | 1997 |
|
RU2113552C1 |
| СПОСОБ УПРАВЛЕНИЯ ПРОЦЕССОМ ЭЛЕКТРОЛИТИЧЕСКОГО ПОЛУЧЕНИЯ АЛЮМИНИЯ В ЭЛЕКТРОЛИЗЕРЕ | 1990 |
|
RU2023058C1 |
| РАСПРЕДЕЛЕННАЯ АВТОМАТИЗИРОВАННАЯ СИСТЕМА УПРАВЛЕНИЯ ЭЛЕКТРОЛИЗОМ АЛЮМИНИЯ | 1999 |
|
RU2156834C1 |
| Устройство для укрепления рамы саней на лыжах | 1934 |
|
SU44794A1 |
| СПОСОБ ПРЕОБРАЗОВАНИЯ СЕЙСМОГРАММ В РАЗРЕЗЫ | 0 |
|
SU195142A1 |
| СПОСОБ МОДЕЛИРОВАНИЯ ПРОЦЕССОВ ЦЕНТРАЛИЗОВАННОГО УПРАВЛЕНИЯ ТЕХНИЧЕСКИМИ СРЕДСТВАМИ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ (ВАРИАНТЫ) | 2011 |
|
RU2487386C2 |

