Предлагаемое изобретение относится к области радиолокации и может быть использовано в сотовых системах связи CDMA для повышения точности определения местоположения абонентской мобильной станции, используемой в системе железнодорожного, автомобильного, речного транспорта, т.е. транспорта, у которого заранее определен маршрут следования.
Необходимость создания системы высокоточного определения координат движущихся транспортных средств обусловлена возрастающими требованиями к безопасности движения и необходимостью повышения эффективности управления железнодорожным, автомобильным, речным транспортом, для которого задан определенный маршрут следования.
Одним из простейших способов организации системы локации, например, на железнодорожном транспорте является использование отчетов машиниста по радиоканалу о расположении транспортного средства. Этот способ неточен, информация быстро устаревает, а также вынуждает машиниста отвлекаться от непосредственного управления движением.
В ранних работах, направленных на создание автоматических систем определения местоположения абонентской мобильной станции, предлагалось использовать специальное оборудование, расположенное на железнодорожных путях. Примером таких устройств являются всевозможные концевые выключатели, которые позволяют установить участок электрической цепи, к которой подключен электровоз. Поскольку концевые выключатели обычно расположены на расстояниях порядка нескольких километров, то такой способ определения местоположения дает достаточно грубую оценку координат транспортного средства.
Более совершенные системы локации железнодорожного транспорта основаны на использовании данных, поступающих со счетчиков оборотов колеса или тахометра, установленных на локомотиве. Эти данные в сочетании с известным временем движения позволяют вычислить пройденный путь. Основные недостатки такого подхода заключаются в том, что ошибки показаний тахометра или счетчика, вызванные проскальзыванием колес, накапливаются с течением времени и точность определения местоположения падает с увеличением пройденного пути.
В последнее время широко применяются системы спутникового позиционирования движущихся объектов, использующих приемники навигационных сигналов GPS или GLONASS. Такие приемники могут быть установлены на всех видах транспорта, у которого заранее определен маршрут следования. Отрицательными моментами такого подхода является невозможность локации в условии отсутствия радиовидимости достаточного числа спутников (обычно 4-х). Такая ситуация может возникнуть в туннелях, каньонах или в городе с плотной застройкой.
Для устранения основных недостатков описанных подходов к решению задачи локации транспортных средств, для которых заранее определен маршрут следования, в настоящее время известны способы определения местоположения абонентской мобильной станции, основанные на одновременном использовании сразу нескольких источников информации о расположении транспортного средства. В качестве таких источников могут выступать трехмерные оценки местоположения, полученные с использованием GPS приемника, известная траектория движения транспортного средства, показания счетчика оборотов колеса или тахометра и др.
Один из таких способов оценки местоположения транспортного средства описан в патенте US 5129605 "Rail Vehicle Positioning System" R.D.Burns, S.E.Bryan, D.B.Turner 1992, B 61 L 25/02//G 01 S 5/14. В данном способе оценка местоположения транспортного средства осуществляется с использованием спутниковой навигационной системы GPS. Для реализации такого способа необходимо, чтобы на транспортном средстве, например локомотиве, было установлено дополнительное оборудование - GPS приемник. Полученная с использованием GPS приемника трехмерная оценка местоположения передается на диспетчерский пункт. Затем в базе данных находят участок железнодорожного полотна, наиболее близкий к полученной оценке местоположения транспортного средства. Пройденный путь от границы участка вычисляется с использованием интерполяции на основе границ участка и координат транспортного средства, полученных ранее. Используя эти данные, вычисляется скорость и направление движения транспортного средства. Затем производится проверка полученных параметров движения транспортного средства на корректность. Если данные корректны, то вычисленные координаты принимаются за окончательную оценку местоположения транспортного средства в данный момент.
Такой подход обладает двумя основными недостатками. Во-первых, реализация такого способа оценки местоположения транспортного средства потребует установки дополнительного оборудования (GPS приемника) на транспортное средство. Что при достаточно большом количестве транспортных средств потребует значительных финансовых затрат. Во-вторых, в данном способе предложен недостаточно эффективный метод использования дополнительной информации о расположении железнодорожного полотна.
Известен способ определения местоположения абонентской мобильной станции, описанный в заявке WO 02/059635 А2 "Train Location System and Method" T.J.Meyer Aug. 1, 2002, B 61 L 25/02. В данном случае предлагается более сложный алгоритм совместного использования координат железнодорожных путей, оценок координат, полученных с использованием GPS приемника, установленного на транспортном средстве, и счетчика пройденного пути. Здесь для получения решения используется оптимальная фильтрация последовательности оценок координат с учетом профиля участка железной дороги, на котором расположено транспортное средство.
Применение фильтрации при оценке координат предлагается и в патенте US 6,218,961 "Method and System for Proximity Detection and Location Determination", E.Gross Apr. 17, 2001, G 08 C 1/16, B 60 T 7/22, B 61 L 23/34, G 01 S 5/14.
В отличие от предыдущего решения здесь используется фильтр Калмана для оценки мгновенных значений псевдорасстояний, полученных с учетом известного профиля железной дороги.
Основным общим недостатком двух описанных способов является их сложность и дороговизна. Действительно, для реализации описанных подходов необходимо оснастить каждый электровоз устройством, которое включает GPS приемник, а также обеспечивает интерфейс между оборудованием транспортного средства (тахометрами, одометрами и т.п.), GPS приемником и устройствами связи. Кроме того, указанное устройство должно решать задачу определения местоположения. При этом требуется оперативная доставка каждому транспортному средству по радиоканалу параметров траектории его движения.
Упрощение таких систем за счет использования только данных автономных GPS приемников для решения навигационной задачи не позволяет решить проблему радиовидимости достаточного числа спутников в неблагоприятных условиях.
Также к недостатку описанных выше решений можно отнести зависимость системы локации от внешних факторов. А именно, от состояния спутников и от информации, передаваемой с них. Данная проблема может быть решена при интеграции железнодорожной транспортной системы и системы сотовой связи. Наиболее целесообразно при этом использовать систему сотовой связи CDMA.
Наиболее близким к заявляемому решению является способ, описанный в книге "Wireless Location in CDMA Cellular Radio Systems" James J.Caffery, Jr., Kluwer, 1999.
Этот способ заключается в том, что:
- принимают N сигналов локации, соответствующих каждой из N базовых станций,
- оценивают по принятым сигналам локации задержку распространения сигнала от каждой из N базовых станций до абонентской мобильной станции с точностью до неизвестной постоянной,
- для каждой базовой станции определяют меру ошибки по оцененной задержке сигнала локации как разность между суммой оцененной задержки с предполагаемым значением неизвестной постоянной, умноженных на скорость света, и расстоянием до предполагаемого местоположения абонентской мобильной станции,
- для каждой базовой станции определяют весовой коэффициент меры ошибки,
- суммируют взвешенные квадраты мер ошибок,
- за местоположение абонентской мобильной станции принимают то, для которого сумма взвешенных мер ошибок минимальна.
Одной из основных особенностей системы сотовой связи CDMA является точная синхронизация передаваемых сигналов. Синхронизация сигналов может быть осуществлена как за счет использования спутниковых навигационных систем, так и за счет внутренних ресурсов сотовой сети.
В качестве сигналов локации в системе связи CDMA наиболее предпочтительно выбирать пилот-сигналы базовых станций, поскольку структура этих сигналов определенна и известна заранее. Точная синхронизация пилот-сигналов, передаваемых базовыми станциями, позволяет оценить расстояния до базовых станций посредством измерения временных задержек между временем передачи сигналов и временем приема данных сигналов абонентской мобильной станцией.
Следует отметить, что даже при отсутствии ошибок в определении расстояния, связанных с шумом, федингом и многолучевостью, в связи с неточной синхронизацией часов мобильной станции и глобальным временем в сотовой системе связи, вычисленные расстояния не будут совпадать с истинными расстояниями от базовых станций до мобильной станции. Они будут отличаться на одинаковое неизвестное значение, равное временному рассогласованию часов мобильной станции и глобального времени сотовой системы связи, умноженному на скорость света. Тогда расстояние от мобильной станции до i-й базовой станции будет представлять сумму измеренной задержки пилот-сигнала (phi) этой базовой станции и неизвестного рассогласования часов (τ), умноженных на скорость света:
rangei=(phi+τ)·с, где i∈[1, N]
Для каждой базовой станции формируется мера ошибки между расстоянием до базовой станции, равным сумме измеренной задержки пилот-сигнала и предполагаемого рассогласования часов τ, умноженных на скорость света, и фактическим расстоянием между базовой станцией и мобильной станцией, расположенной в точке с координатами {x, y, z}:

где - {XBS, YBS, ZBS} координаты i-й базовой станции.
Суммарная мера ошибок измерений всех базовых станций определяется как взвешенная сумма квадратов значений мер ошибок, сформированных для каждой базовой станции:

где Wi - веса, которые устанавливаются, исходя из точности измерения задержки пилот-сигнала каждой базовой станции. Чем выше точность измерения задержки пилот-сигнала, тем с большим весом данное измерение входит в функцию F(х, у, z, τ).
За оценку местоположения мобильной станции и неизвестного рассогласования часов τMC принимаются такие значения {xMC, yMC, zMC, τMC}, при которых функция F(x, y, z, τ) достигает своего абсолютного минимума.
К основным недостаткам данного решения можно отнести следующее.
Для получения решения в предлагаемом способе необходимо минимум четыре измерения задержек пилот-сигналов различных базовых станций. В случае локации железнодорожного транспорта данное требование в ряде случаев не будет выполняться. Это приведет к невозможности определения местоположения подвижных составов. Данный факт резко сужает границы применимости этого решения для определения местоположения транспортных средств.
Также необходимо отметить, что применение данного решения для локации железнодорожного транспорта приведет к тому, что в подавляющем большинстве случаев оценка местоположения транспортного средства будет располагаться на значительном расстоянии от железнодорожного полотна. Это может привести к достаточно большим ошибкам в оценке пройденного пути транспортного средства и его скорости.
Задача, которую решает предлагаемое изобретение, - повышение точности локации за счет использования данных о траектории движения транспортного средства на этапе решения навигационной задачи.
Для решения этой задачи в способ определения местоположения абонентской мобильной станции, установленной на транспортном средстве, заключающийся в том, что принимают N сигналов локации, соответствующих каждой из N базовых станций, по принятым сигналам локации оценивают задержку распространения сигнала локации от каждой из N базовых станций до абонентской мобильной станции, для каждой из N базовых станций определяют меру ошибки по оцененной задержке распространения сигнала локации как разность между суммой оцененной задержки распространения сигнала локации с предполагаемым рассогласованием часов, умноженных на скорость света, и расстоянием до предполагаемого местоположения абонентской мобильной станции, для каждой базовой станции определяют весовой коэффициент меры ошибки, суммируют взвешенные квадраты мер ошибок, за местоположение абонентской мобильной станции принимают то, для которого сумма взвешенных мер ошибок минимальна,
согласно изобретению сведены следующие операции:
- после оценки задержек сигналов локации от каждой из N базовых станций до абонентской мобильной станции формируют оценку расстояния до базовой станции, по сигналам которой абонентская мобильная станция осуществляет синхронизацию своих часов с системным временем сети сотовой связи,
- местоположение абонентской мобильной станции, для которого сумма взвешенных мер ошибок минимальна, принимают за первоначальные оценки координат абонентской мобильной станции, установленной на транспортном средстве,
- формируют траекторию движения транспортного средства в виде функциональной зависимости, на основании данных о расположении определенного маршрута следования транспортного средства и первоначальной оценки координат абонентской мобильной станции, установленной на транспортном средстве,
- оценивают местоположение транспортного средства на основании оценки расстояния до базовой станции, по сигналам которой абонентская мобильная станция осуществляет синхронизацию своих часов с системным временем сети сотовой связи, оценок задержек сигналов локации, координат базовых станций и сформированной функциональной зависимости,
- эту оценку принимают за окончательную оценку координат абонентской мобильной станции, установленной на транспортном средстве.
Функциональная зависимость может быть сформирована, например, способом полиномиальной интерполяции координат точек маршрута следования транспортного средства.
В качестве сигналов локации могут быть использованы, например, пилот-сигналы базовых станций.
Сопоставительный анализ способа определения местоположения абонентской мобильной станции, установленной на транспортном средстве, с прототипом показывает, что предлагаемое изобретение существенно отличается от прототипа, так как позволяет повысить точность и надежность определения местоположения абонентской мобильной станции.
Сопоставительный анализ заявляемого способа с другими техническими решениями в данной области техники не позволил выявить признаки, заявленные в отличительной части формулы изобретения. Следовательно, заявляемый способ определения местоположения абонентской мобильной станции, установленной на транспортном средстве, отвечает критериям "новизна", "техническое решение задачи", "существенные отличия" и обладает неочевидностью решения.
Графические материалы, используемые в описании:
Фиг.1 иллюстрирует способ задания информации о расположении маршрута следования транспортного средства в виде множества точек.
Фиг.2 иллюстрирует способ задания информации о расположении маршрута следования транспортного средства в виде функциональных зависимостей.
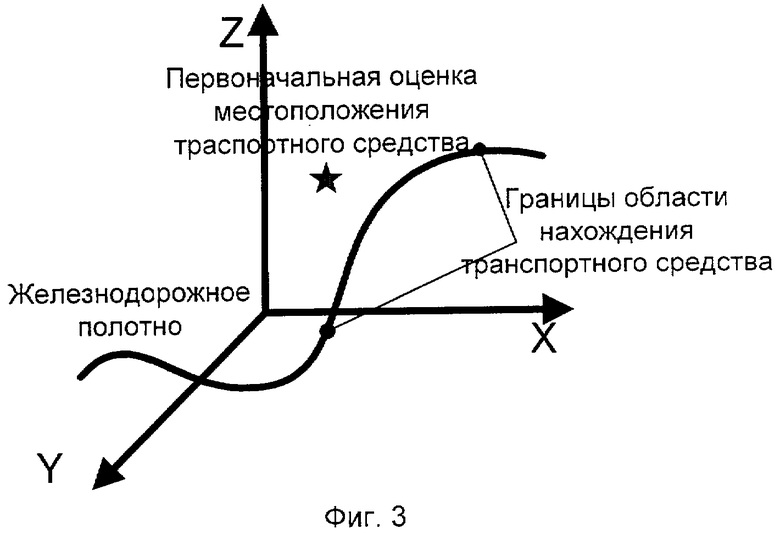
Фиг.3 - иллюстрация взаимного расположения первоначальной оценки местоположения транспортного средства и участка маршрута следования транспортного средства, известное расположение которого используют при решении навигационной задачи.
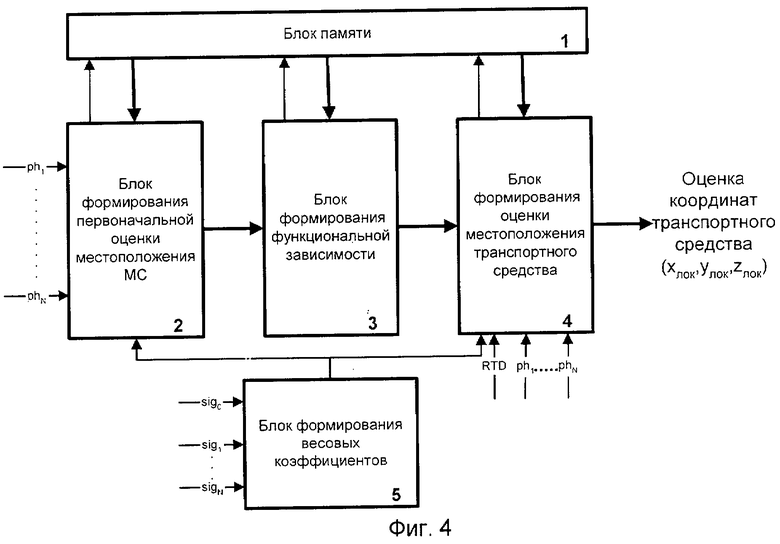
Фиг.4 - пример реализации предлагаемого способа.
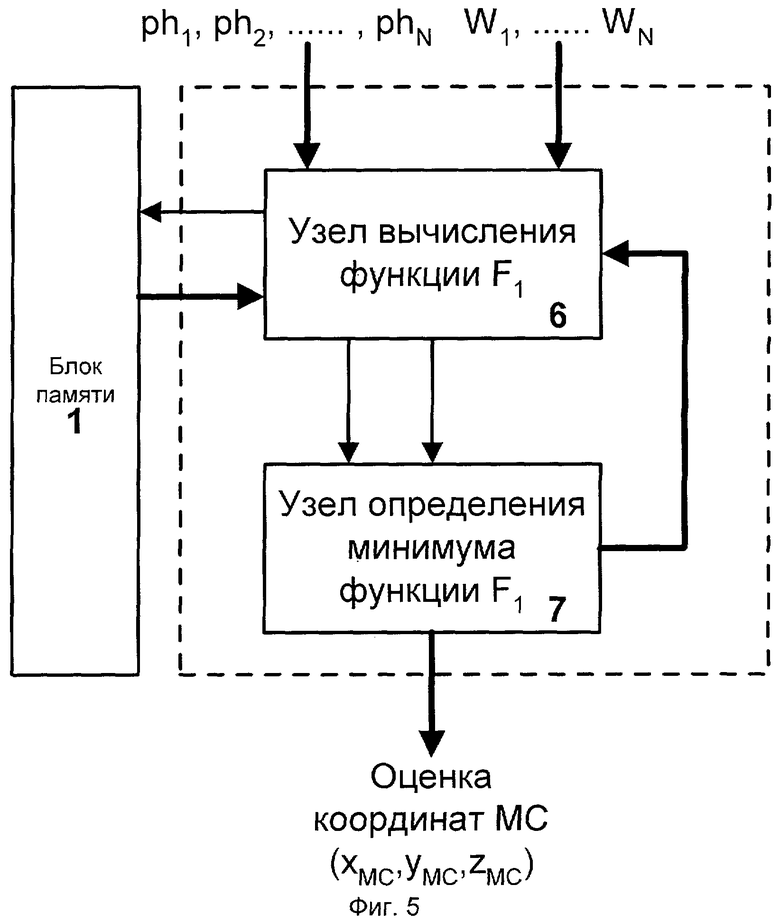
Фиг.5 - вариант выполнения блока формирования первоначальной оценки местоположения мобильной станции.
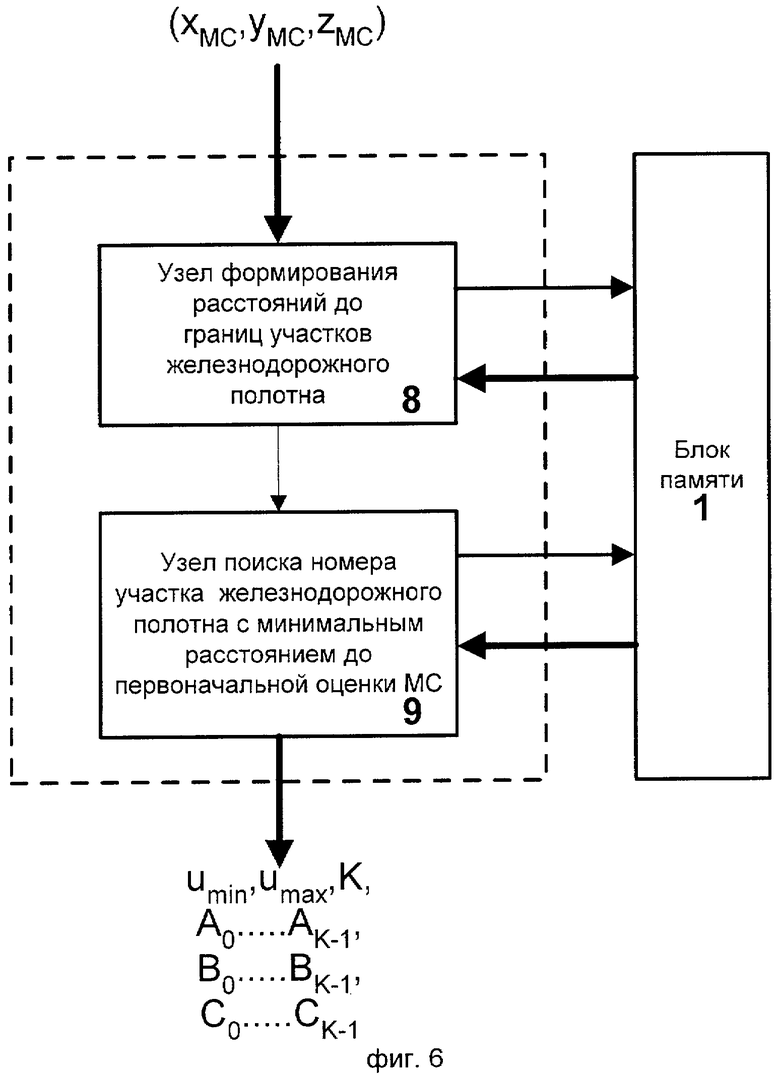
Фиг.6 - вариант выполнения блока формирования функциональной зависимости.
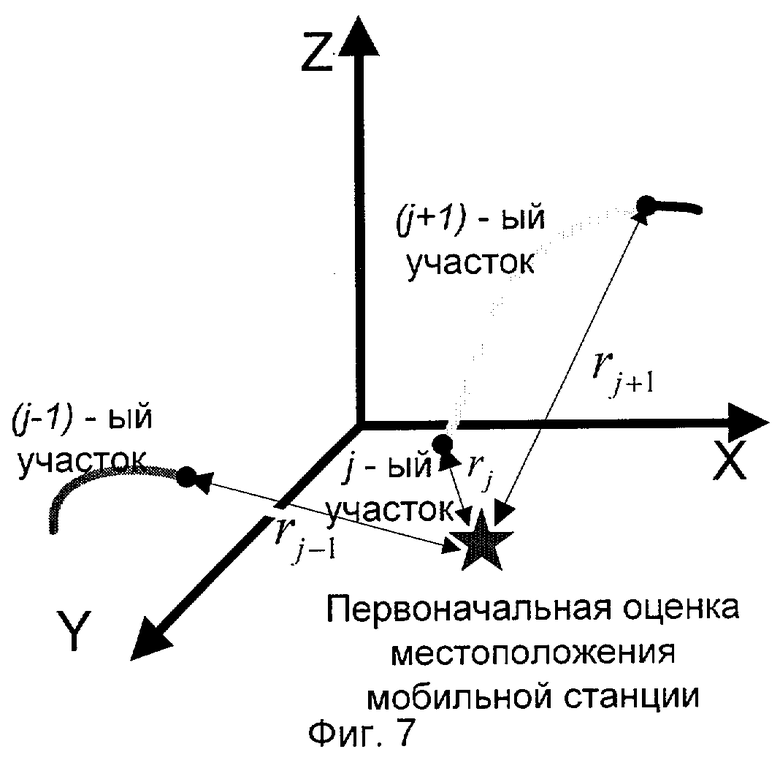
Фиг.7 - иллюстрация способа определения границ участка маршрута следования (в примере железнодорожного полотна).
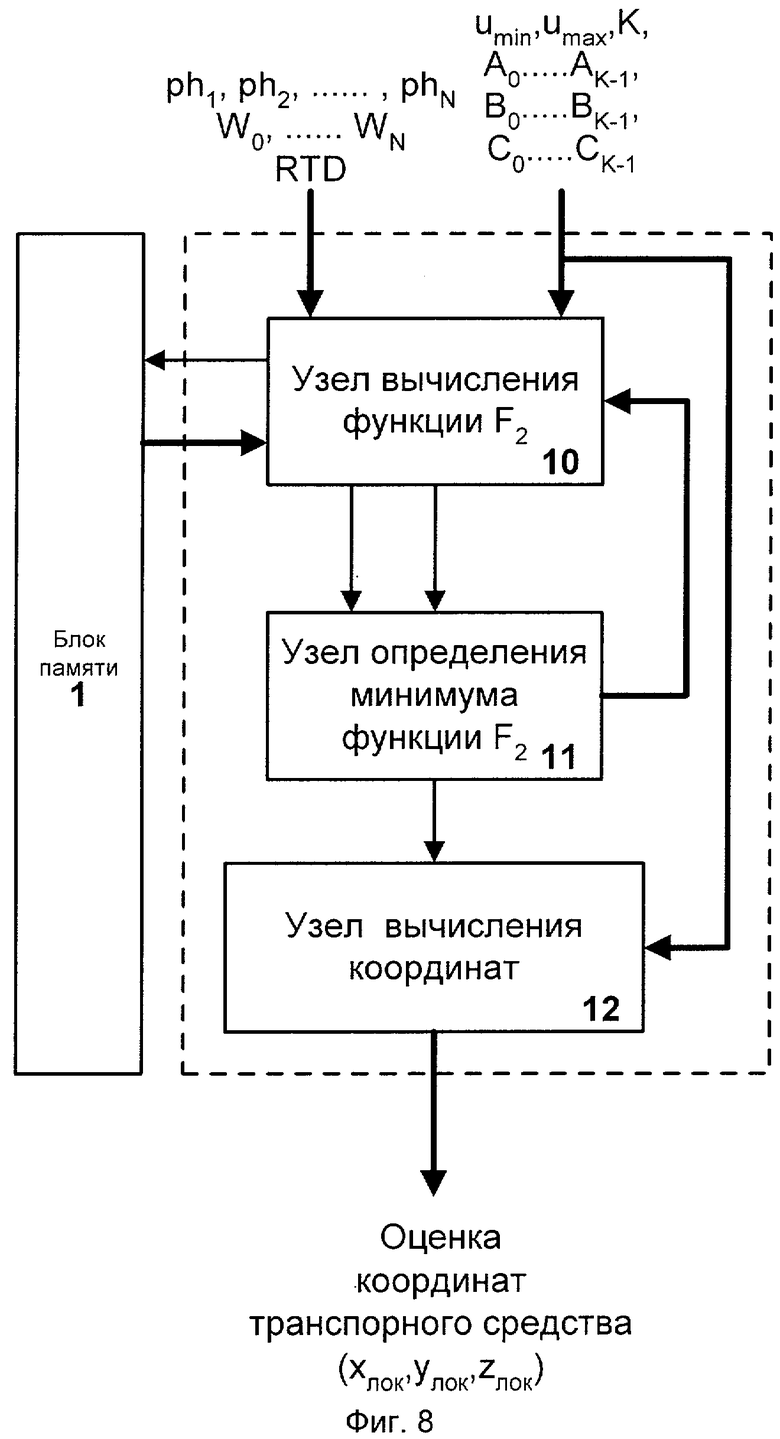
Фиг.8 - вариант выполнения блока формирования оценки местоположения транспортного средства.
Предлагаемое решение заключается в том, что:
- принимают N сигналов локации, соответствующих каждой из N базовых станций,
- по принятым сигналам локации оценивают задержки сигналов локации от каждой из N базовых станций до абонентской мобильной станции,
- формируют оценку расстояния до базовой станции, по сигналам которой абонентская мобильная станция осуществляет синхронизацию своих часов с системным временем сети сотовой связи,
- для каждой базовой станции определяют меру ошибки по оцененной задержке сигнала локации как разность между суммой оцененной задержки сигнала локации с предполагаемым рассогласованием часов, умноженных на скорость света, и расстоянием до предполагаемого местоположения абонентской мобильной станции,
- для каждой базовой станции определяют весовой коэффициент меры ошибки,
- суммируют взвешенные квадраты мер ошибок,
- местоположение абонентской мобильной станции, для которого сумма взвешенных мер ошибок минимальна, принимают за первоначальную оценку координат абонентской мобильной станции, установленной на транспортном средстве,
- формируют траекторию движения транспортного средства в виде функциональной зависимости, на основании данных о расположении определенного маршрута следования транспортного средства и первоначальной оценки координат абонентской мобильной станции, установленной на транспортном средстве,
- оценивают местоположение транспортного средства на основании оценки расстояния до базовой станции, по сигналам которой абонентская мобильная станция осуществляет синхронизацию своих часов с системным временем сети сотовой связи, оценок задержек сигналов локации, координат базовых станций и сформированной функциональной зависимости,
- эту оценку принимают за окончательную оценку координат абонентской мобильной станции, установленной на транспортном средстве.
Функциональная зависимость может быть сформирована, например, способом полиномиальной интерполяции координат точек маршрута следования транспортного средства.
В качестве сигналов локации могут быть использованы, например, пилот-сигналы базовых станций.
Реализацию предлагаемого способа рассмотрим на примере использования транспортного средства в системе железнодорожного транспорта.
В системе сотовой связи CDMA помимо указанных задержек пилот-сигналов также имеется возможность измерить расстояние до базовой станции, по сигналам которой мобильная станция осуществляет синхронизацию своих часов с системным временем сети сотовой связи. Данное расстояние  может быть вычислено на базовой станции на основе разности между началом излучения сигнала базовой станцией и началом приема сигнала от мобильной станции (RTD):
может быть вычислено на базовой станции на основе разности между началом излучения сигнала базовой станцией и началом приема сигнала от мобильной станции (RTD):
где с - скорость света
Для каждой базовой станции формируют меру ошибки между расстоянием до базовой станции, равным сумме задержки пилот-сигнала и предполагаемого рассогласования часов τ, умноженных на скорость света, и фактическим расстоянием между базовой станцией и предполагаемой точкой расположения мобильной станции, координаты которой {x, y, z}:

где - {XBS, YBS, ZBS} координаты i-й базовой станции.
Суммарная мера ошибок измерений для всех базовых станций определяется как взвешенная сумма квадратов значений мер ошибок, сформированных для каждой базовой станции:
где Wi - веса, которые устанавливаются, исходя из точности измерения задержки пилот-сигнала для каждой базовой станции. Чем выше точность измерения задержки пилот-сигнала, тем с большим весом данное измерение входит в функцию F1[x, y, z, τ). Весовые коэффициенты могут быть выбраны, например, следующим образом:

где σi - СКО (среднеквадратичное отклонение) измерения задержки пилот-сигнала. За начальную оценку местоположения мобильной станции и неизвестного рассогласования часов τMC принимаются такие значения {хMC, yMC, zMC, τMC}, при которых функция F1(x, y, z, τ) достигает своего абсолютного минимума. Минимум функции F1(x, y, z, τ) может быть найден известными математическими методами, например градиентным методом, описанным в справочнике Г.Корн, Т.Корн "Справочник по математике". М.: Наука, 1968, 720 с.
В основе предлагаемого решения лежит использование информации о расположении железнодорожного полотна. Данные о расположении железнодорожного полотна могут содержать координаты железнодорожного полотна, расположенные через некоторое расстояние (см.фиг.1), или некоторые функциональные зависимости (см.фиг.2), описывающие кривые в трехмерном пространстве, заданные на определенных участках железнодорожного полотна. Кривая в трехмерном пространстве может быть задана в параметрическом виде (Г.Корн, Т.Корн "Справочник по математике" М.: Наука, 1968, 720 с.):
На основе первоначальной оценки координат транспортного средства по данным о расположении железнодорожных путей определяются границы области нахождения транспортного средства (см. фиг.3).
Границы области нахождения транспортного средства могут быть получены на основе различных критериев. Например, за границы области нахождения транспортного средства могут быть выбраны ближайшие координаты железнодорожного полотна, координаты, располагающиеся на определенном расстоянии от первоначальной оценки и т.д.
Используя данные, которые характеризуют координаты железнодорожного полотна внутри области нахождения транспортного средства, формируют модель траектории движения транспортного средства на выбранном участке в виде функциональной зависимости:
Если данные, характеризующие железнодорожное полотно, содержат координаты железнодорожного полотна, то функциональные зависимости могут быть получены различными способами интерполяции (Крылов В.И., Бобков В.В., Монастырский П.И. "Вычислительные методы высшей математики" Т.1, Мн.: Вышэйш. школа, 1972. 584 с.).
Окончательная оценка координат транспортного средства может быть получена следующим образом. Используя измерения задержек пилот-сигналов, вычисленное расстояние , функциональные зависимости, характеризующие положение железнодорожного полотна, и весовые коэффициенты формируют функцию F2 (u, τ):

где σ0 - СКО измерения RTD,
XBSS, YBSS, ZBSS - координаты базовой станции, по сигналам которой абонентская мобильная станция осуществляет синхронизацию своих часов с системным временем сети сотовой связи.
Значение независимой переменой  и неизвестное рассогласование часов мобильной станции и системного времени сотовой сети
и неизвестное рассогласование часов мобильной станции и системного времени сотовой сети  находят посредством поиска абсолютного минимума функции F2(u, τ):
находят посредством поиска абсолютного минимума функции F2(u, τ):

Тогда окончательные координаты мобильной станции, установленной на транспортном средстве, вычисляются следующим образом:

Способ определения местоположения транспортного средства может быть реализован с помощью устройства, блок-схема которого приведена на фиг.4. Устройство содержит блок памяти 1, блок формирования первоначальной оценки местоположения МС 2, блок формирования функциональной зависимости 3, блок формирования оценки местоположения транспортного средства 4, блок формирования весовых коэффициентов 5.
Выходы блока памяти 1 соединены соответственно с первыми входами блока формирования первоначальной оценки местоположения МС 2, первыми входами блока формирования функциональной зависимости 3, первыми входами блока формирования оценки местоположения транспортного средства 4. На вторые N входов блока формирования первоначальной оценки местоположения МС 2 поступают задержки пилот-сигналов ph1,...,phN. Первый выход блока формирования первоначальной оценки местоположения МС 2 является управляющим и соединен с соответствующим входом блока памяти 1. Второй выход блока формирования первоначальной оценки местоположения МС 2 соединен со вторым входом блока формирования функциональной зависимости 3, на который поступает первоначальная оценка местоположения МС. Первый выход блока формирования функциональной зависимости 3 является управляющим и соединен с соответствующим входом блока памяти 1. Второй выход блока формирования функциональной зависимости 3 соединен с вторым входом блока формирования оценки местоположения транспортного средства 4, на который поступают параметры сформированной функциональной зависимости. Третий вход блока формирования первоначальной оценки местоположения МС 2 и третий вход блока формирования оценки местоположения транспортного средства 4 соединены с выходом блока формирования весовых коэффициентов 5. На четвертый вход блока формирования оценки местоположения транспортного средства 4 поступает оценка расстояния до базовой станции, по сигналам которой МС синхронизируется, на пятые входы вход блока формирования оценки местоположения транспортного средства 4 поступают задержки пилот-сигналов ph1,...,phN. На входы блока формирования весовых коэффициентов 5 поступает среднеквадратичное отклонение оценок измерения задержек пилот-сигналов. Первый выход блока формирования оценки местоположения транспортного средства 4 является управляющим и соединен с соответствующим входом блока памяти 1. Второй выход блока формирования оценки местоположения транспортного средства 4 является выходом устройства.
Такое устройство с описанными функциональными связями является типичным и может быть реализовано на современных микропроцессорах цифровой обработки сигналов (DSP), например TMS 320Схх, Motorola 56xxx, Intel и т.п.
Блок памяти 1 предназначен для хранения данных, необходимых для решения навигационной задачи. К таким данным относятся идентификационные номера и трехмерные координаты базовых станций, а также параметры, характеризующие расположение железнодорожных путей.
Координаты базовых станций могут быть заданы в любой известной системе координат, например в прямоугольной ECEF или во всемирной геодезической системе WGS84. Определение и характеристики указанных координатных систем можно найти, например, в документе "WGS 84 Implementation Manual" Version 2.4, 1998, EUROCONTROL: European Organization for the Safety of Air Navigation, Brussels, Belgium and IfEN: Institute of Geodesy and Navigation University FAF Munich, Germany.
Как указывалось ранее, данные, характеризующие расположение железнодорожных путей, могут быть заданы различными способами. Например, эти данные могут представлять собой координаты множества точек, расположенных на железнодорожных путях, или параметры функциональной зависимости, описывающей кривую в трехмерном пространстве (см.фиг.1, 2).
Рассмотрим один из возможных вариантов функционального описания железнодорожных путей. Предположим, что путь условно разбит на участки, на каждом из которых задано параметрическое описание координат {x, y, z} точек, расположенных на путях
Здесь u - независимая переменная, значения  и
и  которой соответствуют границам участка с номером i. Функции fz(u), fy(u), fz(u) на каждом участке могут быть заданы в виде полиномов порядка Кi, т.е.
которой соответствуют границам участка с номером i. Функции fz(u), fy(u), fz(u) на каждом участке могут быть заданы в виде полиномов порядка Кi, т.е.



где  - известные коэффициенты.
- известные коэффициенты.
При использовании такого описания расположения железнодорожных путей в блоке памяти 1 должны храниться следующие данные:
i - номер участка
 - значения независимой переменной, соответствующие границам участка с номером i
- значения независимой переменной, соответствующие границам участка с номером i
 - координаты границ i-го участка, Кi - максимальная степень полинома,
- координаты границ i-го участка, Кi - максимальная степень полинома,
- коэффициенты полиномов.
Задержки пилот-сигналов базовых станций, а также точности, с которыми они оценены, могут быть получены различными известными способами (Дж.Прокис "Цифровая связь", М.: Радио и связь. 2000. - 800 с.).
Рассмотрим основные операции, осуществляемые в блоке формирования весовых коэффициентов 5. На этот блок 5 поступают оценки точности измерения задержек пилот-сигналов различных базовых станций и оценка точности измерения RTD. На основе полученной информации о точности различных измерений выбираются значения весовых коэффициентов Wi. Чем выше точность измерения задержки, тем с большим весом данное измерение входит в суммарную меру ошибок измерения.
Весовые коэффициенты Wi могут быть сформированы, например, следующим способом
где  , i=1,...,N - дисперсии оценок измерения задержек различных пилот-сигналов базовых станций, а
, i=1,...,N - дисперсии оценок измерения задержек различных пилот-сигналов базовых станций, а  - дисперсия измерения RTD. Не исключаются и другие способы формирования весовых коэффициентов, которые позволят повысить точность оценки координат.
- дисперсия измерения RTD. Не исключаются и другие способы формирования весовых коэффициентов, которые позволят повысить точность оценки координат.
Вариант реализации блока формирования первоначальной оценки местоположения абонентской мобильной станции (МС) 2 представлен на фиг.5. Блок формирования первоначальной оценки местоположения МС 2 содержит узел вычисления функции F1 6 и узел определения минимума функции F1 7. Блок формирования первоначальной оценки местоположения МС 2 работает следующим образом.
На второй вход узла вычисления функции F1 6 поступают задержки пилот сигналов, на третий вход - весовые коэффициенты с выхода блока формирования весовых коэффициентов 5. Узел вычисления функции F1 6 посылает управляющий сигнал на блок памяти 1, по которому из блока памяти 1 на первый вход узла вычисления функции F1 6 поступают координаты базовых станций.
Поступившие данные используются для формирования функции F1, имеющей следующий вид:

где N - количество базовых станций,
 - координаты базовых станций,
- координаты базовых станций,
phi - измерения задержек пилот-сигналов базовых станций,
Wi - весовые коэффициенты.
После формирования функции F1 узел вычисления функции F1 6 посылает управляющий сигнал на узел определения минимума функции f1 7, по которому узел определения минимума функции F1 7 вычисляет минимум функции F1. Узел определения минимума функции F1 7 может быть выполнен различными способами, например на основе градиентного метода, описанного в справочнике Г. Корн, Т. Корн «Справочник по математике». М.: Наука, Главная редакция физ.-мат. литературы, 1968 г. Для этого узел определение минимума функции F1 7 посылает на вход узла вычисления функции F1 6 значения {х, у, z, τ}, в которых необходимо вычислить значение функции F1. Узел вычисления функции F1 6 вычисляет значение функции F1(x, y, z, τ) в точке {х, у, z, τ} и передает вычисленное значение на вход узла определения минимума функции F1 7. Узел определения минимума функции F1 7 повторяет данную процедуру до тех пор, пока не вычислит минимум функции F1. Значения координат {xMC, yMC, zMC}, при которых функция F1 достигает абсолютного минимума, поступают на выход блока формирования первоначальной оценки местоположения МС 2.
Сформированная первоначальная оценка местоположения абонентской мобильной станции {xMC, yMC, zMC} с выхода блока формирования первоначальной оценки местоположения МС 2 поступает на вход блока формирования функциональной зависимости 3.
Один из возможных вариантов реализации блока формирования функциональной зависимости 3 представлен на фиг.6. Блок формирования функциональной зависимости 3 содержит узел формирования расстояний до границ участков железнодорожного полотна 8 и узел поиска номера участка железнодорожного полотна с минимальным расстоянием до первоначальной оценки МС 9. Блок формирования функциональной зависимости 3 работает следующим образом.
На вход узла формирования расстояний до границ участков железнодорожного полотна 8 поступает первоначальная оценка местоположения МС {xMC, yMC, zMC} с выхода блока формирования первоначальной оценки местоположения МС 2. Узел формирования расстояний до границ участков железнодорожного полотна 8 посылает управляющий сигнал на блок памяти 1. После приема управляющего сигнала блок памяти 1 посылает на вход узла формирования расстояний до границ участков железнодорожного полотна 8 данные о границах участков железнодорожного полотна  . Для каждого участка вычисляется расстояние от первоначальной оценки до одной из границы в соответствии с выражением:
. Для каждого участка вычисляется расстояние от первоначальной оценки до одной из границы в соответствии с выражением:

где Муч - количество участков железнодорожного полотна.
Полученные значения ri поступают на вход узла поиска номера участка железнодорожного полотна с минимальным расстоянием до первоначальной оценки МС 9. В узле поиска номера участка железнодорожного полотна с минимальным расстоянием до первоначальной оценки МС 9 среди всех ri определяют минимальное значение:
rj=minrj
Если граница с индексом j принадлежит двум участкам железнодорожного полотна (см.фиг.7), то номер участка железнодорожного полотна выбирается следующим образом. Если rj+1>rj-1, то выбирается участок, порядковый номер которого равен n=j, в противном случае n=j+1. Узел поиска номера участка железнодорожного полотна с минимальным расстоянием до первоначальной оценки МС 9 посылает управляющий сигнал на блок памяти 1 и считывает из блока памяти 1 данные, соответствующие n-му участку железнодорожного полотна:
umin, umax, K, A0, A1,..., AK, B0, B1,..., BK, С0, С1,..., СK
Эти данные поступают на выход блока формирования функциональной зависимости 3.
Вариант реализации блока формирования оценки местоположения транспортного средства 4 представлен на фиг.8. Блок формирования оценки местоположения транспортного средства 4 содержит узел вычисления функции F2 10, узел определения минимума функции F2 11 и узел вычисления координат 12. Блок формирования оценки местоположения локомотива 12 работает следующим образом. На соответствующие входы узла вычисления функции F2 10 поступают задержки пилот-сигналов, весовые коэффициенты с выхода блока формирования весовых коэффициентов 5, RTD и данные с блока формирования функциональной зависимости 3. Узел вычисления функции F2 10 посылает управляющий сигнал на блок памяти 1, по которому из блока памяти 1 на вход узла вычисления функции F2 10 поступают координаты базовых станций. Поступившие данные используются для формирования функции F2, имеющей следующий вид:
После формирования функции F2 узел вычисления функции F2 10 посылает управляющий сигнал на узел определения минимума функции F2 11, по которому узел определения минимума функции F2 11 вычисляет минимум функции F2. Узел определения минимума функции F2 11 может быть выполнен различными способами, например на основе градиентного метода, описанного в справочнике Г.Корн, Т.Корн «Справочник по математике». М., Наука, 1968 г., 700 с. Для реализации различных способов вычисления минимума функции узел определение минимума функции F2 11 посылает на вход узла вычисления функции F2 10 значения {u, τ}, для которых необходимо вычислить значение функции F2. Узел вычисления функции F2 10 вычисляет значение функции F2(u, τ) в точке {u, τ} и передает вычисленное значение на вход узла определения минимума функции F2 11. Узел определения минимума функции F2 11 повторяет данную процедуру до тех пор, пока не вычислит минимум функции F2. Значения параметра uлок, при которых функция F2 достигает абсолютного минимума, поступают на вход узла вычисления координат 12. Также на вход узла вычисления координат 12 поступают данные с блока формирования функциональной зависимости 3. Узел вычисления координат 12 вычисляет координаты транспортного средства следующим образом:

Вычисленные координаты транспортного средства поступают на выход блока формирования оценки местоположения транспортного средства 4.
Одними из основных преимуществ предложенного способа организации системы определения местоположения транспортного средства является его сравнительные простота и надежность. Действительно, для реализации описанного подхода не требуется установка специального оборудования на транспортное средство, поскольку решение навигационной задачи основано на измерениях, производимых абонентской мобильной станцией. При этом все основные вычисления, связанные с оценкой координат, производятся в стационарном блоке оценки местоположения, который должен быть включен в состав сотовой сети связи. При использовании такого решения нет необходимости создавать дополнительные вычислительные ресурсы на транспортных средствах и обеспечивать хранение больших объемов данных, содержащих информацию о расположении определенного маршрута следования транспортного средства. Эти данные могут храниться в базе данных блока определения местоположения.
Отмеченная высокая надежность описанной системы локации объясняется тем, что в ней частично или полностью может быть решена проблема "видимости" источников навигационных сигналов, которая наиболее характерна для спутниковых навигационных систем. Это следует из того, что сотовая сеть, обеспечивающая радиосвязь транспорта, маршрут которого заранее определен, должна быть спроектирована таким образом, чтобы обеспечить гарантированное покрытие всех участков маршрута следования транспортного средства, включая туннели, ущелья и т.п. Однако следует сказать, что в описанных условиях обычные сетевые методы локации также могут быть неработоспособны по причине отсутствия достаточного числа измерений. В большинстве случаев предлагаемый подход позволяет решить эту проблему путем использования данных о расположении маршрута следования транспортного средства и осуществления дополнительного измерения расстояния от мобильной до одной из базовых станций. При использовании указанных дополнительных данных снижается число неизвестных в навигационной задаче. Поэтому для оценки координат достаточно меньшего числа измерений, чем это необходимо в обычных системах сетевой локации
Автономность локационной системы является также немаловажным фактором, который позволяет обеспечить ее надежность. Описанная система локации не имеет зависимостей вне сети сотовой связи и при условии наличия внутренней синхронизации сигналов базовых станций является полностью автономной. Это выгодно отличает предложенную систему от систем спутниковой навигации, где надежность определения местоположения транспортных средств напрямую зависит от состояния спутников и качества передаваемого ими навигационного сигнала.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ АБОНЕНТСКОЙ МОБИЛЬНОЙ СТАНЦИИ | 2002 |
|
RU2248669C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ МОБИЛЬНОГО АБОНЕНТА | 2000 |
|
RU2183021C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ МОБИЛЬНОГО АБОНЕНТА | 1999 |
|
RU2157548C1 |
| СПОСОБ ОЦЕНКИ ПАРАМЕТРОВ МНОГОЛУЧЕВЫХ ОШИБОК ИЗМЕРЕНИЙ ПСЕВДОРАССТОЯНИЙ ДЛЯ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ МОБИЛЬНОЙ СТАНЦИИ | 2004 |
|
RU2267796C2 |
| СПОСОБ ОЦЕНКИ ПАРАМЕТРОВ МНОГОЛУЧЕВЫХ ОШИБОК ИЗМЕРЕНИЙ ПСЕВДОРАССТОЯНИЙ ДЛЯ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ МОБИЛЬНОЙ СТАНЦИИ | 2004 |
|
RU2278394C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ МОБИЛЬНОЙ СТАНЦИИ | 2001 |
|
RU2252429C2 |
| МЕЖЧАСТОТНАЯ ЭСТАФЕТНАЯ ПЕРЕДАЧА ОБСЛУЖИВАНИЯ | 2006 |
|
RU2384977C2 |
| СПОСОБ СЛЕЖЕНИЯ ЗА ОПЕРАТИВНОЙ ОБСТАНОВКОЙ НА ЖЕЛЕЗНОЙ ДОРОГЕ, АВТОМАТИЗИРОВАННАЯ СИСТЕМА СЛЕЖЕНИЯ ЗА ОПЕРАТИВНОЙ ОБСТАНОВКОЙ НА ЖЕЛЕЗНОЙ ДОРОГЕ И СИСТЕМА ПЕРЕДАЧИ И ОБРАБОТКИ ИНФОРМАЦИИ ДЛЯ АВТОМАТИЗИРОВАННОЙ СИСТЕМЫ СЛЕЖЕНИЯ НА ЖЕЛЕЗНОЙ ДОРОГЕ | 2005 |
|
RU2294298C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ МОБИЛЬНОГО АБОНЕНТА ВНУТРИ ПОМЕЩЕНИЙ | 2003 |
|
RU2312461C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ЧАСТОТЫ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ (ВАРИАНТЫ) | 1999 |
|
RU2157050C1 |
Изобретение относится к области радиолокации и может быть использовано в сотовых системах связи CDMA для повышения точности определения местоположения абонентской мобильной станции, используемой в системе железнодорожного, автомобильного, речного транспорта, т.е. транспорта, у которого заранее определен маршрут следования. Достигаемым техническим результатом является повышение точности локации за счет использования данных о траектории движения транспортного средства на этапе решения навигационной задачи. Решение навигационной задачи основано на измерениях, производимых абонентской мобильной станцией. При этом все основные вычисления, связанные с оценкой координат, производятся в стационарном блоке оценки местоположения, который должен быть включен в состав сотовой сети связи. Описанная система локации не имеет зависимостей вне сети сотовой связи и при условии наличия внутренней синхронизации сигналов базовых станций является полностью автономной. Это отличает данную систему от систем спутниковой навигации, где надежность определения местоположения транспортного средства напрямую зависит от состояния спутников и качества передаваемого ими навигационного сигнала. 2 з.п. ф-лы, 8 ил.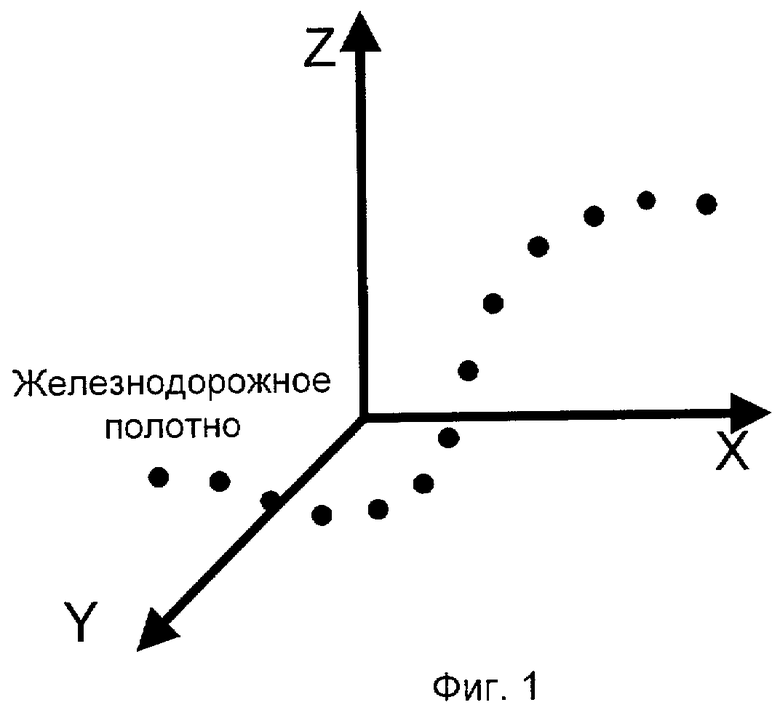
| СИСТЕМА И СПОСОБ ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ БЕСПРОВОДНОГО ПРИЕМОПЕРЕДАТЧИКА СИСТЕМЫ МНОЖЕСТВЕННОГО ДОСТУПА С КОДОВЫМ РАЗДЕЛЕНИЕМ КАНАЛОВ | 1999 |
|
RU2235341C2 |
| СОТОВАЯ СИСТЕМА ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ, КОМПЕНСИРУЮЩАЯ ЗАДЕРЖКИ ПРИНИМАЕМЫХ СИГНАЛОВ В РАДИОПРИЕМНИКАХ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ | 1998 |
|
RU2221257C2 |
| US 5129605 A, 14.07.1992 | |||
| US 5058200 A, 15.10.2004. | |||

