Предлагаемое изобретение относится к области радиолокации и может быть использовано в сотовых системах связи для определения местоположения мобильной станции.
Постоянное расширение сферы услуг в системах сотовой мобильной связи делает особенно актуальным решение задачи определения местоположения абонентской мобильной станции (МС). Стандарты на современные системы сотовой связи включают требования к точности локации. Так, например, в 1998 г. для американских стандартов было установлено требование обеспечения точности не хуже 125 м в 67% случаев. В настоящее время эти требования имеют тенденцию к повышению. В связи с этим обстоятельством задача разработки более точных методов локации становится особенно актуальной.
Во многих ситуациях эффективным методом радиолокации объекта является дальнометрический, в котором расстояния между МС и каждой из нескольких базовых станций (БС) оцениваются по времени распространения сигнала. Оценки этих расстояний, а также известные координаты каждой из БС позволяют вычислить координаты МС. Примерами подобных способов локации могут служить методы, описанные в патентах WO # 98/14018: Method and system for mobile location estimation, M. Wylie, 2 April 1998; US # 5732354: Method and apparatus for determining the location of mobile telephone, March 24, 1998; US # 5736964: Method and apparatus for location finding in CDMA system. April 7, 1997.
Серьезной проблемой локации являются ошибки местоположения, которые обусловлены искажениями сигнала типа фединг, шум или многолучевость. Для снижения вероятности ошибок прибегают к повышению мощности, увеличению длительности передаваемого сигнала локации, а также к передаче последовательности сигналов локации вместо одного и применению специальных алгоритмов обработки данных. Примером может служить способ, описанный в патенте US # 5736964: Method and apparatus for location finding in CDMA system. April 7, 1997, направлен на разработку дешевого метода локации мобильного абонента. Способ основан на оценке времени распространения сигнала между МС и каждой из нескольких БС. Эта оценка делается по сигналу, модулированному псевдослучайной последовательностью. При этом определяют время прихода передних фронтов каждого элементарного символа (чипа) из группы предварительно определенных чипов псевдослучайной последовательности.
Данный метод запатентован в нескольких вариантах, которые включают использование сигналов только прямого или обратного каналов системы связи, а также локацию по сигналам, передаваемым в двух направлениях - в прямом и обратном.
В случае локации по обратному каналу все активные БС сразу после получения команды локации начинают прием и накопление информации о номерах опорных чипов сигнала абонента и временах их прихода. Информация о парах чип/время вместе с информацией о задержках в тракте приемника каждой из активных БС направляется в локационное устройство, где вычисляется позиция абонента.
Недостатком данного метода является снижение точности локации в условиях фединга, многолучевости и высокого уровня помех. При этом для обеспечения высокой точности локации требуются высокое отношение мощности сигнала к мощности помехи, значительная длительность передаваемого сигнала локации, а также передача последовательности сигналов локации вместо одного. В условиях сотовой системы связи такие меры приводят к дополнительной загрузке трафика, увеличению уровня внутрисистемных помех и снижению емкости системы.
Наиболее близким к заявляемому решению является способ, описанный в книге "Wireless Location in CDMA Cellular Radio Systems" by James J. Gaffery Jr. /University of Cincinnati/ Cincinnati, OH, USA./ Kluwer Academic Publishers. 2000./ Electronic Services: http://www.wkap.nl, Sections 1.3.1, 2.1.
Этот способ локации заключается в следующем:
- осуществляют прием сигналов локации, распространяющихся между МС и каждой из 3-х БС,
- при этом для каждого сигнала локации формируют метрику, основанную на функции корреляции данного сигнала локации с опорным сигналом, при взаимных временных задержках, соответствующих возможным значениям предполагаемого времени распространения сигнала локации,
- определяют оценку времени распространения каждого из 3-х сигналов локации, как значение времени распространения, при котором соответствующая метрика имеет максимум, и таким образом формируют множество из 3-х оценок времен распространения,
- по множеству из 3-х оценок времен распространения формируют множество оценок расстояний между МС и каждой из 3-х БС,
- на множестве точек предполагаемого местоположения МС строят линии положения, каждая из которых представляет окружность с центром в точке местоположения соответствующей БС и радиусом, равным соответствующей оценке расстояния,
- выбирают все возможные пары линий положения и по каждой паре строят новую линию положения,
- как прямую линию, проходящую через точки пересечения, если линии положения этой пары пересекаются,
- общую касательную, если линии положения этой пары касаются друг друга,
- прямую, равноудаленную от самых близких друг к другу точек линий положения этой пары, если они не имеют общих точек,
- формируют оценку местоположения МС как точку пересечения новых линий положения.
Недостатком данного способа является значительное снижение точности локации в условиях шума, фединга, внутрисистемных помех. При этом функция корреляции сигнала локации серьезно искажается. Результатом таких искажений являются большие ошибки в оценках времени распространения сигнала между МС и БС и локации в целом.
Кроме того, данный алгоритм основан на предположении возможности достичь как угодно высокой потенциальной точности измерений при высоком уровне отношения сигнал - помеха. Однако это предположение, как правило, не выполняется. Например, системные часы, по которым измеряются времена передачи и приема сигналов локации, имеют определенную погрешность, которая может быть весьма значительной. Любые погрешности часов, характерные даже для систем связи с синхронными БС, приведут к дополнительным ошибкам локации.
Задача, которую решает предлагаемое изобретение, - повышение точности определения местоположения МС.
Для решения этой задачи в способ определения местоположения мобильного абонента, заключающийся в том, что осуществляют прием сигналов локации, распространяющихся между МС и каждой из N БС, при этом для каждого сигнала локации формируют корреляционную метрику, основанную на функции корреляции данного сигнала локации с опорным сигналом, при взаимных временных задержках, соответствующих возможным значениям предполагаемого времени распространения сигнала локации, формируют оценку местоположения МС,
дополнительно введены следующие операции: для каждой из N базовых станций
- определяют диапазон возможных значений ошибки в оценке времени распространения сигнала локации и функцию плотности распределения вероятности этих значений ошибки,
- преобразуют метрику, интегрируя ее по области возможных значений ошибки с весом, равным плотности распределения вероятности значений ошибки, формируя таким образом преобразованную метрику,
- определяют весовой коэффициент преобразованной метрики,
- за оценку местоположения МС принимают точку наиболее вероятного местоположения, для которой взвешенная сумма значений преобразованных метрик, соответствующих временам распространения сигнала между данной точкой и соответствующей базовой станцией, имеет максимум.
Причем точкой приема сигнала локации может быть МС, а точками передачи - множество БС или, наоборот, точкой передачи сигнала локации является МС, а точками приема - множество БС.
Корреляционную метрику формируют, например, как модуль или квадрат модуля функции корреляции между сигналом локации и опорным сигналом, а функцию корреляции можно сформировать как последовательность значений корреляции между входным и опорным сигналами при взаимных временных задержках, соответствующих последовательности возможных значений предполагаемого времени распространения сигнала локации.
Функцию плотности распределения вероятности ошибки в оценке времени распространения сигнала локации определяют на основании априорных данных об источнике этих ошибок, например определяют равномерной в области от минимального до максимального значений взаимной ошибки системных часов МС и БС, или на основании анализа входного сигнала и сформированной метрики.
Весовой коэффициент преобразованной корреляционной метрики определяют в зависимости от отношения мощности соответствующего сигнала локации к мощности помех в соответствующем канале распространения, например, пропорционально отношению сигнала к помехе.
Для отыскания точки наиболее вероятного местоположения МС на множестве точек предполагаемого местоположения МС определяют область наиболее вероятного местоположения МС, из области наиболее вероятного местоположения МС формируют множество проверочных точек, равномерно покрывающих всю область, таким образом, что соседние точки находятся на расстоянии, не превышающем величину допустимой погрешности оценки местоположения, для каждой точки из множества проверочных точек формируют суммарную метрику как взвешенную сумму значений преобразованных метрик, соответствующих временам распространения сигнала между данной точкой и соответствующей базовой станцией, за оценку местоположения принимают проверочную точку с максимальным значением суммарной метрики.
Сопоставительный анализ способа определения местоположения мобильного абонента с прототипом показывает, что предлагаемое изобретение существенно отличается от прототипа, так как позволяет повысить точность локации и определения местоположения мобильного абонента.
Сопоставительный анализ заявляемого способа с другими техническими решениями в данной области техники не позволил выявить признаки, заявленные в отличительной части формулы изобретения. Следовательно, заявляемый способ определения местоположения мобильного абонента отвечает критериям "новизна", "техническое решение задачи", "существенные отличия" и обладает неочевидностью решения.
Графические материалы, поясняющие данное изобретение
Фиг. 1 - пример корреляционных метрик, сформированных для трех базовых станций.
Фиг.2 - примеры распределения плотности вероятности значений ошибок.
Фиг. 3 - пример объединенной корреляционной метрики, сформированной для трех базовых станций.
Фиг.4 - определение максимума суммарной корреляционной метрики.
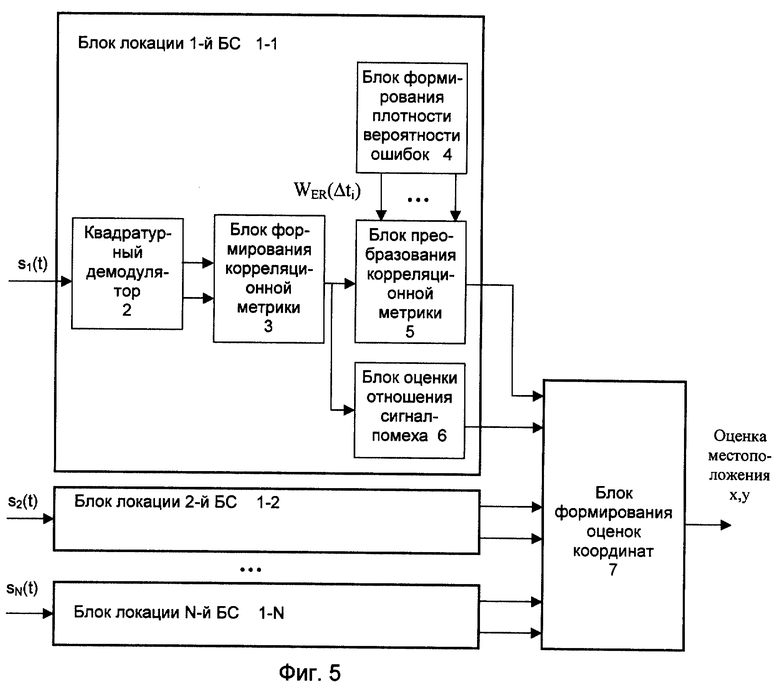
Фиг.5 - блок-схема устройства локации.
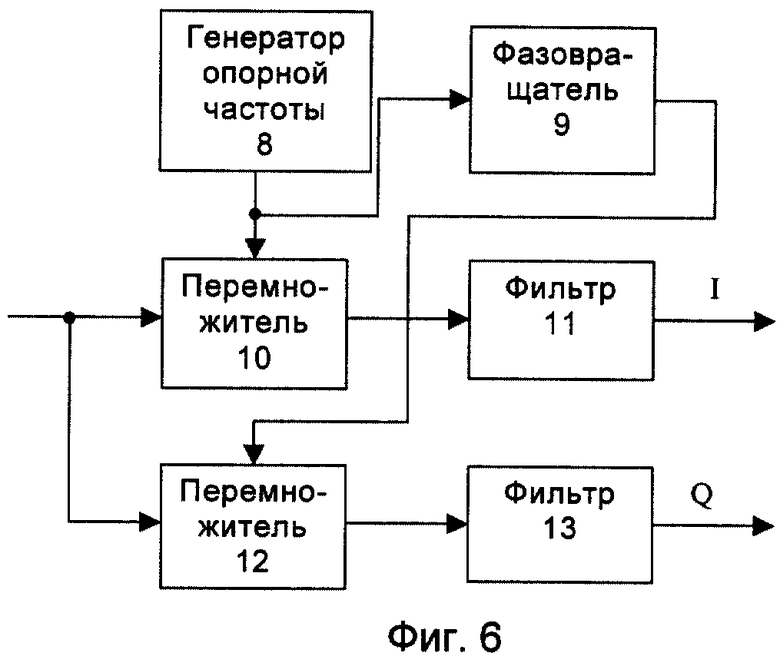
Фиг.6 - пример выполнения квадратурного демодулятора.
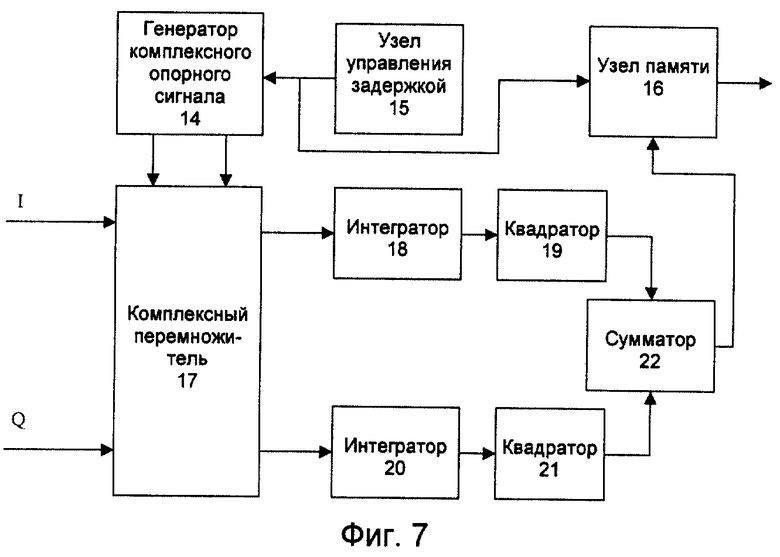
Фиг.7 - пример выполнения блока формирования корреляционной метрики.
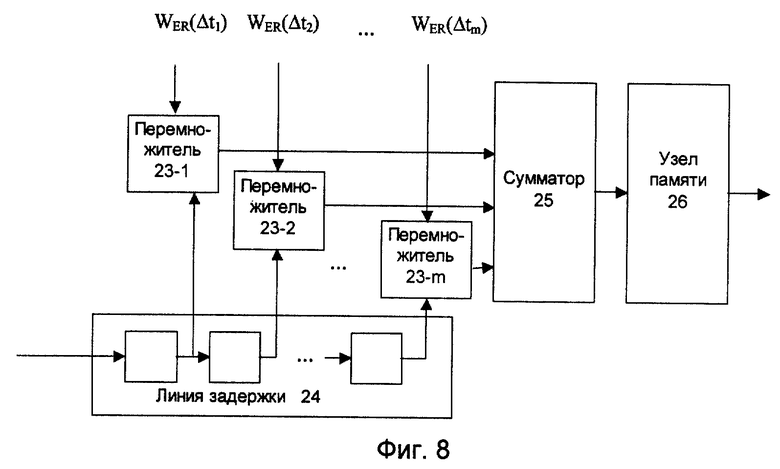
Фиг.8 - пример выполнения блока преобразования корреляционной метрики.
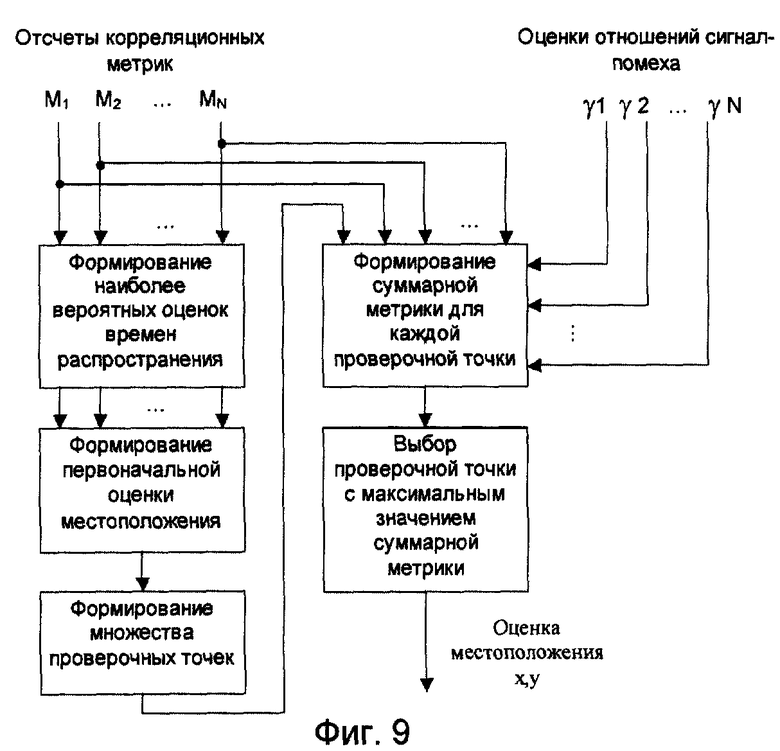
Фиг.9 - алгоритм работы блока формирования оценок координат.
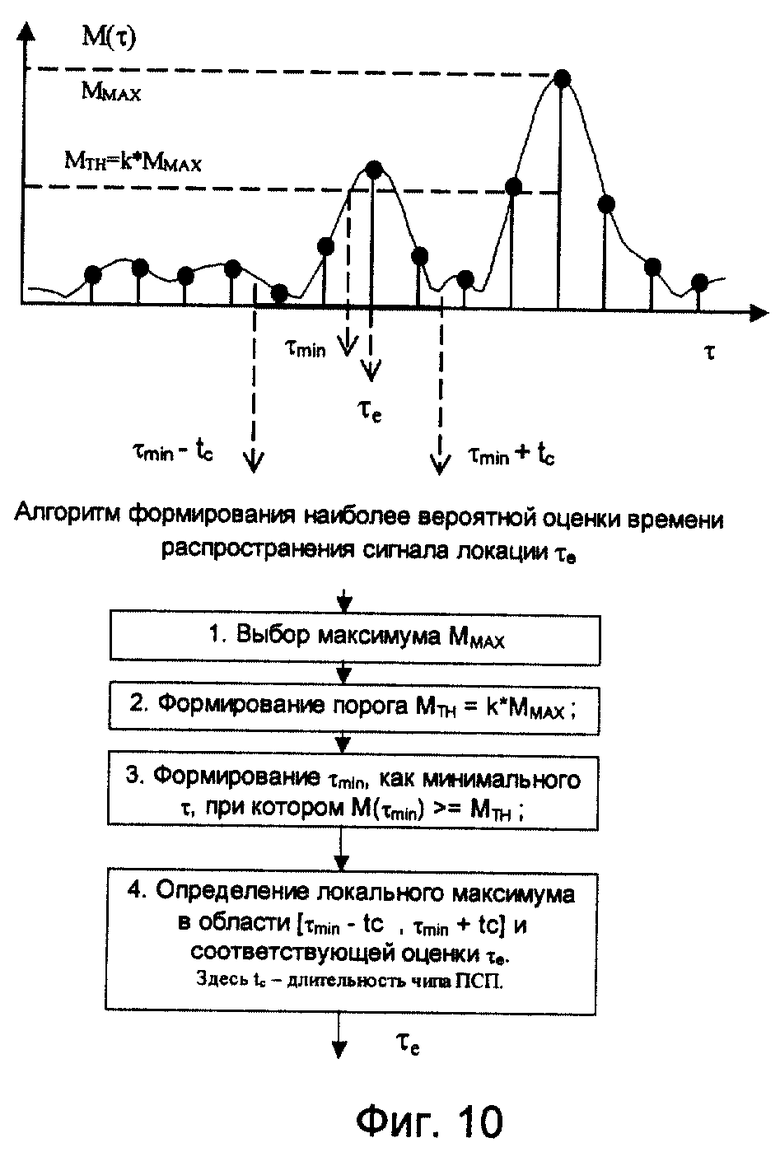
Фиг. 10 - примерный алгоритм формирования наиболее вероятной оценки времени распространения.
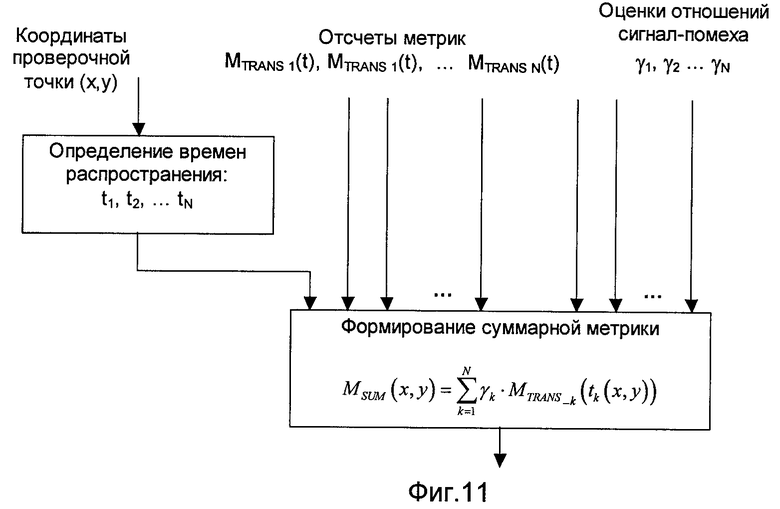
Фиг.11 - примерный алгоритм формирования суммарной метрики.
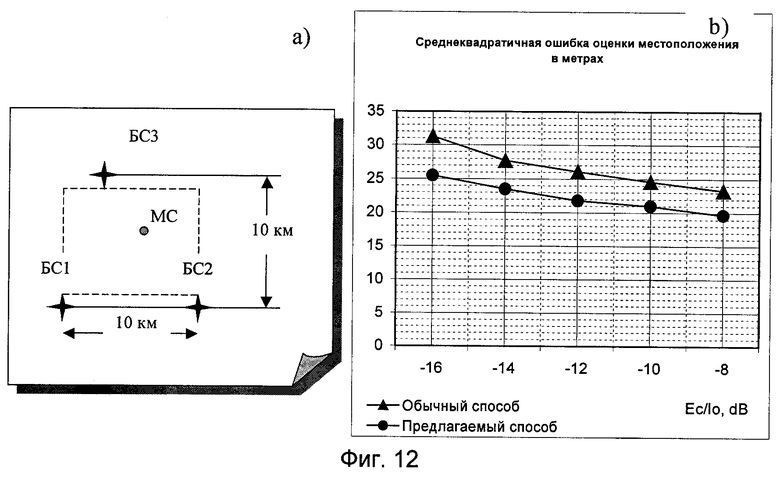
Фиг.12 - сравнительные характеристики заявляемого метода локации и метода прототипа.
Предлагаемый способ заключается в следующем:
- осуществляют прием сигналов локации, распространяющихся между МС и каждой из N БС,
- при этом для каждого сигнала локации формируют корреляционную метрику, основанную на функции корреляции данного сигнала локации с опорным сигналом, при взаимных временных задержках, соответствующих возможным значениям предполагаемого времени распространения сигнала локации,
для каждой из N базовых станций
- определяют диапазон возможных значений ошибки в оценке времени распространения сигнала локации и функцию плотности распределения вероятности этих значений ошибки,
- преобразуют метрику, интегрируя ее по области возможных значений ошибки с весом, равным плотности распределения вероятности значений ошибки; таким образом формируют преобразованную метрику;
- определяют весовой коэффициент преобразованной метрики;
- за оценку местоположения МС принимают точку наиболее вероятного местоположения, для которой взвешенная сумма значений преобразованных метрик, соответствующих временам распространения сигнала между данной точкой и соответствующей базовой станцией, имеет максимум;
- точкой приема сигнала локации является МС, а точками передачи - множество N БС и, наоборот, точкой передачи сигнала локации является МС, а точками приема - множество N БС;
- корреляционную метрику формируют как модуль или квадрат модуля функции корреляции между сигналом локации и опорным сигналом;
- функцию корреляции формируют как последовательность значений корреляции между входным и опорным сигналами при взаимных временных задержках, соответствующих последовательности возможных значений предполагаемого времени распространения сигнала локации;
- функцию плотности распределения вероятности ошибки в оценке времени распространения сигнала локации определяют на основании априорных данных об источнике этих ошибок, например функцию плотности распределения вероятности ошибки в оценке времени распространения сигнала локации определяют равномерной в области от минимального до максимального значений взаимной ошибки системных часов МС и БС, или на основании анализа входного сигнала и сформированной метрики,
- весовой коэффициент преобразованной метрики определяют в зависимости от отношения мощности соответствующего сигнала локации к мощности помех в соответствующем канале распространения, например, пропорционально отношению сигнала к помехе,
- для отыскания точки наиболее вероятного местоположения МС на множестве точек предполагаемого местоположения МС определяют область наиболее вероятного местоположения МС, из области наиболее вероятного местоположения МС формируют множество проверочных точек, равномерно покрывающих всю область, таким образом, что соседние точки находятся на расстоянии, не превышающем величину допустимой погрешности оценки местоположения, для каждой точки из множества проверочных точек формируют суммарную метрику как взвешенную сумму значений преобразованных метрик, соответствующих временам распространения сигнала между данной точкой и соответствующей базовой станцией, за оценку местоположения принимают проверочную точку с максимальным значением суммарной метрики.
Согласно заявляемому методу осуществляют прием сигналов локации, распространяющихся между МС и каждой из N БС. При этом возможны два варианта. Первый, когда сигналы локации передаются несколькими источниками сигналов и принимаются МС. Источниками сигналов могут быть базовые станции современной сотовой системы связи или спутники системы GPS (Global Positioning System). Во втором варианте МС передает сигнал локации, который принимается несколькими БС. Такой способ позволяет избежать усложнения оборудования МС, так как наиболее сложные операции выполняются на БС.
При приеме для каждого сигнала локации формируют решающую функцию, основанную на функции корреляции данного сигнала локации с опорным сигналом, при взаимных временных задержках, соответствующих возможным значениям предполагаемого времени распространения сигнала локации. Ее называют также корреляционной метрикой. Обычно, в качестве корреляционной метрики используют модуль или квадрат модуля функции корреляции между сигналом локации и опорным сигналом. Иногда корреляционную метрику формируют как сумму квадратов модулей значений корреляционной функции, сформированных по последовательным временным интервалам входного сигнала.
В цифровых приемниках функцию корреляции формируют как последовательность цифровых значений корреляции между входным и опорным сигналами при взаимных временных задержках, соответствующих последовательности возможных значений предполагаемого времени распространения сигнала локации. Пример корреляционных метрик, сформированных на каждой из 3-х БС, показан на фиг.1.
Первым направлением повышения точности в заявляемом решении является совместная обработка корреляционных метрик, сформированных по сигналам локации различных БС.
В традиционных методах локации, в том числе и методе прототипа, выполняют независимую оценку времени распространения сигнала на нескольких БС. Время распространения оценивают путем выбора максимального значения метрики. Такая независимая оценка времен распространения сигнала не позволяет достичь наилучшей эффективности локации, поскольку любые отклонения значений корреляционных метрик за счет шума или фединга приводят к ошибкам локации.
В соответствии с первым направлением в заявляемом способе предлагается для каждой точки из области предполагаемого местоположения МС просуммировать независимые корреляционные метрики, соответствующие различным БС.
Такое суммирование позволяет повысить точность за счет компенсации случайных отклонений корреляционных метрик при их суммировании. Таким образом, снижается порог требуемого отношения сигнал-шум, что позволяет понизить мощность сигнала локации и, следовательно, уровень внутрисистемных помех.
Второе направление повышения точности локации, используемое в заявляемом решении, это оптимальное использование информации о возможных ошибках измерений, связанных, например, с возможным рассогласованием системных часов или с отсутствием прямого луча распространения сигнала. При сформированной корреляционной метрике M(t) и имеющейся информации о плотности вероятности ошибки WER(Δt) плотность вероятности того или иного значения времени распространения сигнала пропорциональна метрике, преобразованной следующим образом:
Следовательно, вероятность расположения МС в некоторой точке пропорциональна сумме величин MTRANS(t), сформированных для данной точки относительно каждой из N БС.
В соответствии с этим для каждой из N базовых станций сначала определяют диапазон возможных значений ошибки в оценке времени распространения сигнала локации и функцию плотности распределения вероятности этих значений ошибки. Затем преобразуют метрику, интегрируя ее по области возможных значений ошибки с весом, равным плотности распределения вероятности значений ошибки; таким образом формируют преобразованную метрику.
В цифровом приемнике операция по преобразованию метрики (1) выразится суммой
Здесь M(t) - корреляционная метрика, WER(Δτ0)- дискретная плотность распределения вероятностей ошибки, Δτ0- шаг изменения временных оценок.
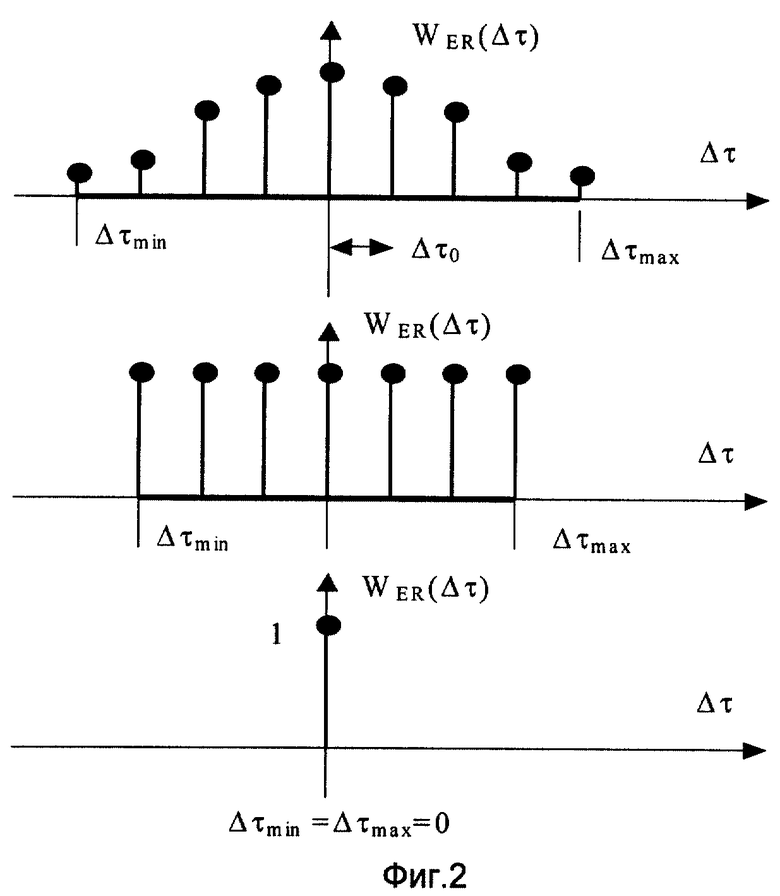
Диапазон возможных значений ошибки (Δτmin, Δτmax) можно определить, например, на основании информации о погрешности системных часов. Примеры функций плотности распределения вероятностей ошибки приведены на фиг.2. Нижний график соответствует случаю отсутствия ошибок измерения, средний - равномерной плотности, которая представлена множеством одинаковых значений вероятности, распределенных в диапазоне от Δτmin до Δτmax, верхний - некоторой произвольной плотности.
Корреляционные метрики MTRANS(t) различных БС имеют различную степень достоверности, которая зависит от отношения сигнал-помеха γ. Поэтому при формировании суммарной метрики это учитывается путем умножения каждого из слагаемых на весовой коэффициент, зависящий от отношения сигнал-помеха γ на соответствующей БС. Весовой коэффициент Ak может быть выбран, например, пропорциональным или равным γk(k=1,... N).
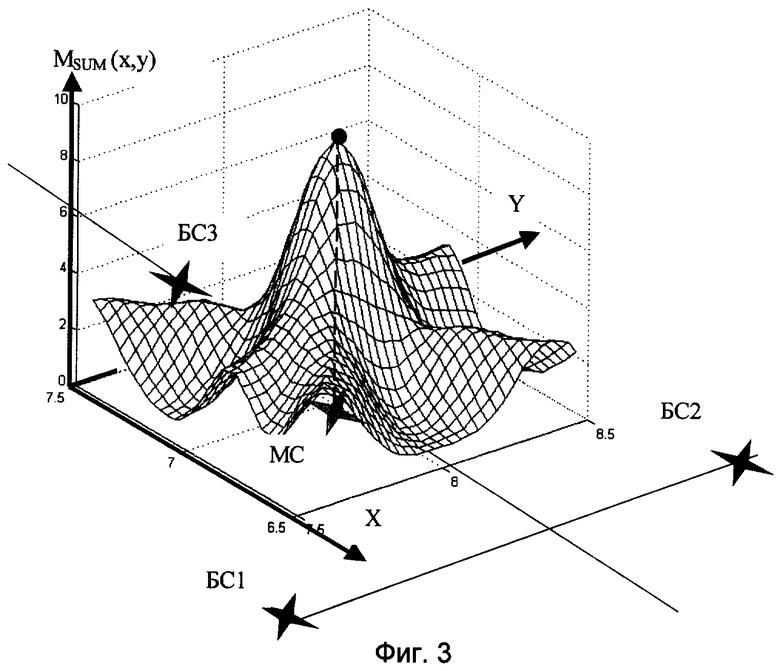
Таким образом, для каждой точки в области предполагаемой локации МС может быть определена суммарная метрика:
Пример сформированной таким образом метрики МSUM(х, у) приведен на фиг. 3. Для определения местоположения необходимо найти точку с максимальным значением метрики МSUM (х, y).
Такая суммарная метрика, сформированная для каждой точки предполагаемого местоположения, позволяет использовать информацию о канале распространения, содержащуюся во входной реализации и корреляционной метрике, а также информацию о возможных ошибках измерений и, следовательно, повысить эффективность локации.
После этого задача оценки местоположения МС сводится к определению максимума функции МSUM (х, у). Очевидно, что существует множество способов определения максимального значения функции двух переменных МSUM (х, у).
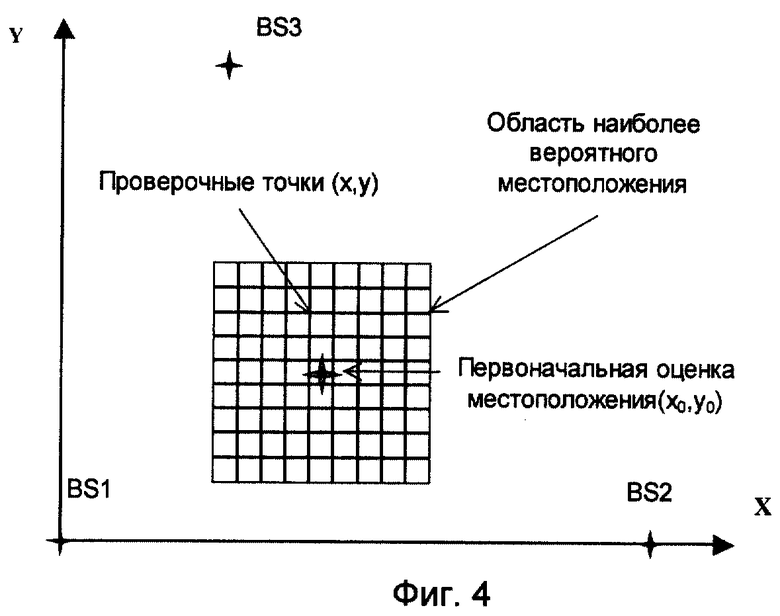
Одно из возможных решений, предлагаемое в заявляемом способе, проиллюстрировано на фиг.4. На множестве точек предполагаемого местоположения МС определяют область наиболее вероятного местоположения МС.
Для этого сначала для каждой БС определяют наиболее вероятное значение оценки времени распространения Т, например, как минимальное значение времени, при котором величина метрики имеет локальный максимум, превышающий некоторый порог. На основании этой оценки формируют точку первоначальной оценки местоположения. Первоначальную оценку местоположения определяют, например, методом, предложенным в прототипе "Wireless Location in CDMA Cellular Radio Systems" by James J. Gaffery Jr./University of Cincinnati/ Cincinnati, OH, USA. / Kluwer Academic Publishers. 2000./ Electronic Services: http: //www.wkap.nl, Sections 1.3.1, 2.1.
To есть, по множеству наиболее вероятных значений оценок времен распространения T1, T2,... Tn сигнала до каждой из N БС формируют множество соответствующих оценок расстояний;
на множестве точек предполагаемого местоположения МС строят N линий положения, каждая из которых представляет окружность с центром в точке местоположения соответствующей БС и радиусом, равным соответствующей оценке расстояния,
выбирают всевозможные пары линий положения и по каждой паре строят новую линию положения как прямую линию,
a) проходящую через точки пересечения, если линии положения этой пары пересекаются,
b) общую касательную, если линии положения этой пары касаются друг друга,
c) прямую, равноудаленную от самых близких друг к другу точек линий положения этой пары, если они не имеют общих точек;
из всех точек пересечения новых линий положения формируют точку с координатами, равными средним арифметическим значениям координат, ее и принимают за точку первоначальной оценки местоположения.
Затем определяют область наиболее вероятного местоположения МС как некоторую окрестность точки первоначальной оценки местоположения, причем размеры окрестности определяются априорными данными о возможных ошибках измерений.
Из области наиболее вероятного местоположения МС формируют множество проверочных точек, равномерно покрывающих всю область, таким образом, что соседние точки находятся на расстоянии, не превышающем величину допустимой погрешности оценки времени распространения сигнала. Например, точки могут располагаться в узлах квадратной сетки (см. фиг.4).
Для каждой точки из сформированного множества определяют времена tk(x, y) (k=1... N) распространения сигнала между данной точкой и соответствующей базовой станцией, а затем формируют величину суммарной метрики MSUM(tk(x, y)) (3). За оценку местоположения принимают точку с максимальным значением суммарной метрики.
Заявляемый способ локации может быть реализован на основе устройства, изображенного на фиг.5, где обозначено:
1 - блоки локации базовых станций,
2 - квадратурный демодулятор,
3 - блок формирования корреляционной метрики,
4 - блок формирования плотности вероятности ошибок,
5 - блок преобразования корреляционной метрики,
6 - блок оценки отношения сигнал-помеха,
7 - блок формирования оценок координат.
Устройство содержит N блоков локации 1, соответствующих каждой из N базовых станций (БС), на вход каждого из которых поступает сигнал локации, прошедший обработку в антенном и радиочастотном трактах приемника соответствующей БС. Сигнал локации представляет собой сигнал с прямым расширением спектра псевдослучайной последовательностью (ПСП), например такой, как в современных системах связи cdma2000. Блок локации 1 каждой БС содержит последовательно соединенные квадратурный демодулятор 2, вход которого является входом блока локации 1, блок формирования корреляционной метрики 3, блок преобразования корреляционной метрики 5, второй вход которого соединен с выходом блока формирования плотности ошибок 4, а выход является первым выходом каждого блока локации 1. Выход блока формирования корреляционной метрики 3 соединен также со входом блока оценки отношения сигнал-помеха 6, выход которого является вторым выходом каждого блока локации 1. Первый и второй выходы блока локации 1 (выход блока преобразования корреляционной метрики 5 и выход блока оценки отношения сигнал-помеха 6) каждой базовой станции соединены со входами блока формирования оценок координат 7, выход которого является выходом устройства.
Сигналы локации s1(t), s2(t),... sN(t) поступают в блоки локации 1-1... 1-N соответственно каждой из N базовых станций. В каждом блоке локации 1 пришедший сигнал поступает в квадратурный демодулятор 2, который осуществляет преобразование сигнала, приводящее к переносу его спектра в область видеочастот, вариант выполнения которого представлен на фиг.6, где обозначено:
8 - генератор опорной частоты,
9 - фазовращатель,
10 - первый перемножитель,
11 - первый фильтр,
12 - второй перемножитель,
13 - второй фильтр.
Квадратурный демодулятор работает следующим образом. Входной сигнал поступает на два перемножителя 10 и 12. В перемножителе 10 отсчеты сигнала умножаются на гармонический сигнал с частотой, равной частоте входного сигнала, сформированный в генераторе опорной частоты 8, а в перемножителе 12 - на тот же опорный сигнал, смещенный по фазе на 90 градусов. С перемножителей сигнал поступает на фильтры, которые отфильтровывают область нулевой частоты спектра. Таким образом формируются синфазная I и квадратурная Q компоненты демодулированного сигнала.
Обе компоненты сигнала поступают в блок формирования корреляционной метрики.
На фиг. 7 представлен вариант выполнения блока формирования корреляционной метрики 3, где обозначено:
14 - генератор комплексного опорного сигнала,
15 - узел управления задержкой,
16 - узел памяти,
17 - комплексный перемножитель,
18 - первый интегратор,
19 - первый квадратор,
20 - второй интегратор,
21 - второй квадратор,
22 - сумматор.
Блок формирования корреляционной метрики работает следующим образом. Узел 15 управления задержкой устанавливает определенную величину задержки опорного сигнала относительно пришедшего демодулированного сигнала. Величины возможных задержек устанавливаются исходя из априорных знаний о возможном времени прихода сигнала. Генератор 14 генерирует два опорных сигнала, являющихся видеокопиями синфазной (I) и квадратурной (Q) компонент полезного сигнала. В комплексном перемножителе 17 происходит перемножение синфазной и квадратурной компонент входного сигнала с аналогичными компонентами опорного сигнала по правилам перемножения комплексных чисел. При этом I и Q компоненты каждого из сигналов представляются как действительная и мнимая компоненты соответствующих комплексных значений. Интеграторы 18 и 20 производят суммирование отсчетов действительной и мнимой частей получившегося произведения, а квадраторы 19 и 21 формируют их квадратичные значения. Данные значения суммируются сумматором 22. Таким образом на выходе сумматора 22 формируется квадратичное значение корреляции между входным и опорным сигналами. Данное значение при соответствующем значении задержки опорного сигнала представляет отсчет метрики и записывается узлом памяти 16, параллельно в узел 16 поступает значение задержки, которое ставится в соответствие данному отсчету метрики. Далее узел управления задержкой 15 устанавливает новое значение задержки и производится вычисление следующего отсчета метрики. Операция продолжатся для всех возможных задержек во времени прихода сигнала.
Сформированная в блоке 3 метрика поступает в блок 6 оценки отношения сигнал-помеха, в котором оценивается отношение мощностей сигнала к мощности помехи по сформированной корреляционной метрике, блок выполняется по стандартным схемам. Сформированная метрика из блока 3 поступает также в блок 5 преобразования корреляционной метрики, туда же поступают отсчеты плотности вероятности ошибок из блока 4, который в общем случае представляет собой блок памяти, в который заносятся дискретные значения плотности вероятности ошибок на основании данных о возможном источнике этих ошибок, как в приведенных выше примерах (см. фиг.2). В блоке 5 отсчеты корреляционной метрики преобразуются в соответствии с формулой (2).
На фиг. 8 представлен вариант выполнения блока преобразования корреляционной метрики 5, где обозначено:
23-1 - 23-m - перемножители,
24 - линия задержки,
25 - сумматор,
26 - узел памяти.
Блок преобразования корреляционной метрики работает следующим образом. Каждый пришедший отсчет сформированной метрики проходит линию задержки 24 с отводами. Задержанные сигналы с отводов линии задержки поступают на перемножители 23-1 - 23-m, где умножаются на значения плотности вероятностей ошибок, соответствующие времени задержки данного отвода линии задержки. Сформированные таким образом произведения складываются сумматором 25, а затем записываются в узел памяти 26. Таким образом формируются все отсчеты преобразованной метрики согласно формуле (2).
Наборы отсчетов преобразованных корреляционных метрик и оценки отношения сигнал-помеха от всех БС поступают в блок формирования оценок координат, который формирует оценку местоположения МС, алгоритм его работы показан схематически на фиг.9.
Сначала по наборам отсчетов преобразованных корреляционных метрик M1, M2, ... Мn, полученных от каждой из N базовых станций, производится формирование наиболее вероятных оценок времен распространения соответствующих сигналов локации. Пример выполнения этой операции, показан схематически на фиг. 10.
При этом сначала определяется глобальный максимум метрики Мmах и по его величине определяется порог k•Mmax, где k - некоторый коэффициент. Затем определяется наиболее раннее τmin значение времени задержки, при котором уровень метрики превышает порог. В окрестности τmin±tc(tc - длительность элементарного символа-чипа - ПСП) определяется локальный максимум. Соответствующее время τe е принимается за наиболее вероятную оценку времени распространения сигнала локации.
По сформированным оценкам времен распространения производится формирование первоначальной оценки местоположения. Это может быть сделано любым известным методом, например описанным выше способом прототипа.
По первоначальной оценке местоположения производится формирование множества проверочных точек, как это описано выше и проиллюстрировано на фиг.4. Затем выбирается проверочная точка, для которой суммарная метрика имеет максимум, которая и принимается за оценку местоположения МС.
Для оценки характеристик предлагаемого алгоритма локации было проведено компьютерное моделирование. Результаты проиллюстрированы на фиг.12. На фиг. 12-а показано расположение базовых станций, используемое при моделировании. На фиг. 12-b - зависимость среднеквадратичной ошибки от отношения сигнал-помеха. Параметры моделирования: длительность сигнала локации 1,25 мс; канал распространения: Гауссовский шум, Релеевский фединг; Ec/lo - отношение энергии чипа сигнала к спектральной мощности шума для максимально удаленной БС; количество экспериментов 500; положение МС выбиралось случайным образом внутри пунктирного прямоугольника. Результаты демонстрируют, что предлагаемый способ имеет преимущество по эффективности примерно 4 дБ.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ МОБИЛЬНОГО АБОНЕНТА | 1999 |
|
RU2157548C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ МОБИЛЬНОЙ СТАНЦИИ | 2001 |
|
RU2252429C2 |
| СПОСОБ ОЦЕНКИ ПАРАМЕТРОВ МНОГОЛУЧЕВЫХ ОШИБОК ИЗМЕРЕНИЙ ПСЕВДОРАССТОЯНИЙ ДЛЯ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ МОБИЛЬНОЙ СТАНЦИИ | 2004 |
|
RU2267796C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ АБОНЕНТСКОЙ МОБИЛЬНОЙ СТАНЦИИ | 2002 |
|
RU2248669C2 |
| СПОСОБ ОЦЕНКИ ПАРАМЕТРОВ МНОГОЛУЧЕВЫХ ОШИБОК ИЗМЕРЕНИЙ ПСЕВДОРАССТОЯНИЙ ДЛЯ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ МОБИЛЬНОЙ СТАНЦИИ | 2004 |
|
RU2278394C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ВЗАИМНОГО ВРЕМЕННОГО РАССОГЛАСОВАНИЯ СИГНАЛОВ БАЗОВЫХ СТАНЦИЙ В СИСТЕМЕ СОТОВОЙ РАДИОСВЯЗИ | 2002 |
|
RU2248668C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ АБОНЕНТСКОЙ МОБИЛЬНОЙ СТАНЦИИ, УСТАНОВЛЕННОЙ НА ТРАНСПОРТНОМ СРЕДСТВЕ | 2004 |
|
RU2272356C1 |
| СПОСОБ РАЗНЕСЕННОЙ ПЕРЕДАЧИ СИГНАЛА И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2001 |
|
RU2208911C2 |
| СПОСОБ НАПРАВЛЕННОЙ ПЕРЕДАЧИ С ОБРАТНОЙ СВЯЗЬЮ | 2004 |
|
RU2278471C2 |
| СПОСОБ ПЕРЕДАЧИ СИГНАЛА И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2004 |
|
RU2262198C1 |
Изобретение относится к радиолокации и может быть использовано в сотовых системах связи для определения местоположения мобильной станции (МС). Достигаемым техническим результатом изобретения является повышение точности определения местоположения МС для каждой из N базовых станций. Отличительной особенностью предлагаемого способа является то, что определяют диапазон возможных значений ошибки в оценке времени распространения сигнала локации и функции плотности распределения вероятности этих значений ошибки, преобразуют корреляционную метрику, интегрируя ее по области возможных значений ошибки с весом, равным плотности распределения вероятности значений ошибки, и, формируя преобразованную корреляционную метрику, определяют весовой коэффициент преобразованной корреляционной метрики, а за оценку местоположения МС принимают точку наиболее вероятного местоположения, для которой взвешенная сумма значений преобразованных корреляционных метрик, соответствующих временам распространения сигнала между данной точкой и соответствующей базовой станцией, имеет максимум. Результаты моделирования показывают, что предлагаемый способ имеет преимущество по эффективности примерно 4 дБ. 9 з.п. ф-лы, 12 ил.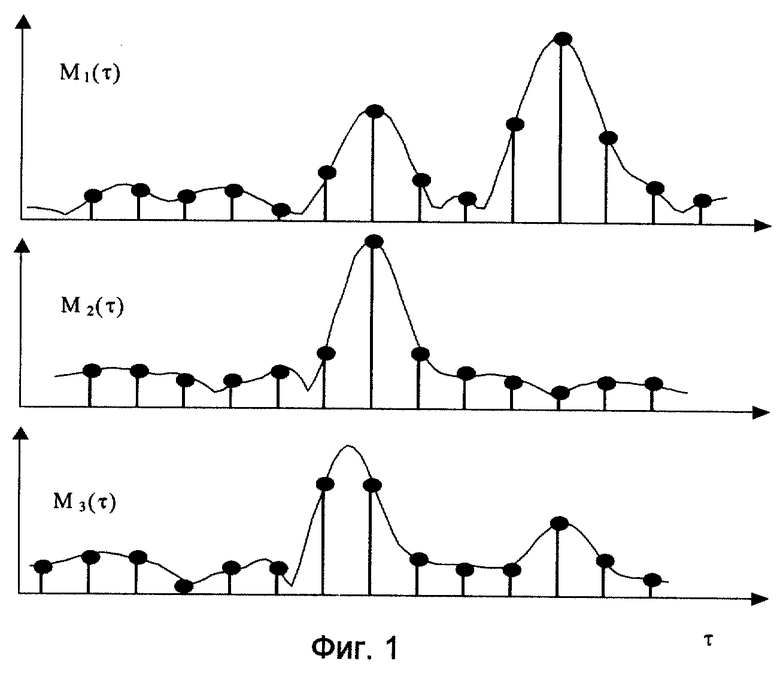
| "Wireless Location in CDMA Cellular Radio Systems" by JAMES J GAFFERY Jr./University of Cincinnati / Cincinnati, OH, USA | |||
| / Klumer Academic Publishers, 2000 / Electronic Service, Sections 1.3.1, 2.1 | |||
| US 5412389 A, 02.05.1995 | |||
| US 5500648 A, 19.03.1996 | |||
| Устройство для дуговой сварки плавящимся электродом с увеличенным вылетом электрода | 1975 |
|
SU582073A1 |
| СПУТНИКОВАЯ РАДИОНАВИГАЦИОННАЯ СИСТЕМА ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ОБЪЕКТА | 1999 |
|
RU2152050C1 |

