Изобретение относится к области радиолокации и может быть использовано в сотовых системах связи для повышения точности определения местоположения мобильной станции.
Постоянное повышение качества и расширение сферы услуг в системах сотовой мобильной связи делает особенно актуальным решение задачи определения местоположения мобильной станции (МС).
Данная задача имеет широкий спектр применения. Определение местоположения мобильной станции (локация) необходимо для нахождения пользователей, нуждающихся в медицинской, милицейской или другой помощи, для осуществления диспетчерских функций парка машин, например, "скорой помощи" или такси, для специальных милицейских или военных целей и др.
Одним из распространенных способов локации является способ с использованием спутниковых навигационных систем, среди которых наиболее распространенной является система Global Positioning System (GPS) (GPS SPS Signal Specification, June 2, 1995, 2-nd Edition) [1]. GPS - это система передатчиков спутниковых сигналов, которые передают информацию, на основе которой можно определить местоположение наблюдателя. Система GPS рассчитана таким образом, что минимум четыре спутника GPS видны из самых удаленных точек на поверхности Земли. Это позволяет использовать GPS систему для определения положения наблюдателя в любом месте Земли. На каждом спутнике находятся цезиевые или рубидиевые атомные часы, обеспечивающие синхронизацию сигналов, переданных спутниками. В GPS системе осуществляется постоянный контроль за ходом часов на спутниках и в случае необходимости осуществляется коррекция часов для каждого спутника.
Каждый спутник GPS непрерывно передает навигационные сигналы. В передаваемых сигналах содержится информация о том, когда этот сигнал был передан, какие координаты спутника были в данный момент и т.д. Расстояние между спутником и GPS приемником может быть определено посредством измерения временной задержки между временем приема сигнала на GPS приемнике и временем, когда этот сигнал был передан спутником. GPS приемник генерирует такой же сигнал как и спутник, благодаря чему GPS приемник может оценить временную задержку между сигналами. Но так как часы GPS приемника не точно синхронизированы с атомными часами на спутнике, то GPS приемник оценивает псевдорасстояния.
Наиболее часто прием сигналов, во время локации, осуществляется в городских условиях, в связи с чем большинство измерений псевдорасстояний содержат ошибки, связанные с непрямым распространением сигналов. Когда число "загрязненных" измерений мало (не более двух), задача повышения точности оценки местоположения может быть решена за счет использования различных методов FDI (Fault detection and isolation) - обнаружения и устранения ошибок измерений, описанных, например, в "Understanding GPS:
Principles and Applications", Elliott D. Kaplan, Artech House, Hardcover, Published February 1996, 570 pages, ISBN 0890067937 [2]. В основе данных методов лежит подход, основанный на определении измерений, подверженных многолучевости, и удалении их из системы навигационных уравнений.
Один из способов FDI описан в патенте US5841399 "Fault detection and exclusion used in a global positioning system GPS receiver" J. Yu, H 04 B 7/185; G 01 S 5/02, Nov. 24, 1998 [3].
В способе, описанном в данном патенте, в процессе локации определяют взвешенную сумму мер ошибок измерений расстояний от всех спутников, причем за меру ошибки принимают квадрат разности между измеренным расстоянием и расстоянием до предполагаемого местоположения мобильной станции (МС). Находят местоположение МС, соответствующее минимуму взвешенной суммы мер ошибок, используя измерения всех базовых станций, и сравнивают значение минимума взвешенной суммы мер ошибок с порогом, по которому принимают решение о наличии ошибочных измерений. Если принято решение о наличии ошибок, то определяют для каждого спутника взвешенную сумму мер ошибок от всех базовых станций (БС), кроме данной. Для каждой суммы находят местоположение МС, соответствующее минимуму для данной суммы. Затем находят минимальную сумму среди множества данных взвешенных сумм и сравнивают ее с порогом. Эти операции повторяют до тех пор, пока взвешенная сумма не окажется меньше порога и тогда полученные координаты МС принимают за окончательные или до принятия решения о том, что локация неуспешна.
Недостатком такого решения является невозможность достоверного обнаружения ошибочных измерений в случае, когда два или более измерений псевдорасстояний содержат аномальные ошибки, что очень характерно при локации в городских условиях. В случае, когда аномальные ошибки содержатся в двух или более измерениях, может сложиться ситуация, когда удаление одного не ошибочного измерения приведет к тому, что значение взвешенной суммы ошибок не превысит порог, и тогда полученная оценка местоположения будет принята за окончательную, что приведет к увеличению ошибки в оценке местоположения.
В литературе известно достаточно много различных методов FDI, однако применение данных методов при наличии многолучевых ошибок у большинства измерений не позволяет повысить точность локации. Таким образом, в случае определения местоположения в городских условиях необходимо использовать альтернативные методы оценки местоположения.
Наиболее эффективным является использование калибровочных таблиц для многолучевых ошибок. Иными словами, для оценки местоположения мобильной станции предлагается использовать статистическую информацию о характере многолучевых ошибок, полученную по предварительным испытаниям. Однако основной проблемой при составлении калибровочных таблиц является неизвестное рассогласование часов мобильной станции и времени GPS.
Один из способов формирования калибровочной таблицы и дальнейшего использования ее для оценки местоположения мобильной станции в городских условиях рассмотрен в патенте US 5926133 "Differentially corrected position location system and method for mobile communication networks", H 01 Q 21/06, Jul. 20, 1999 [4].
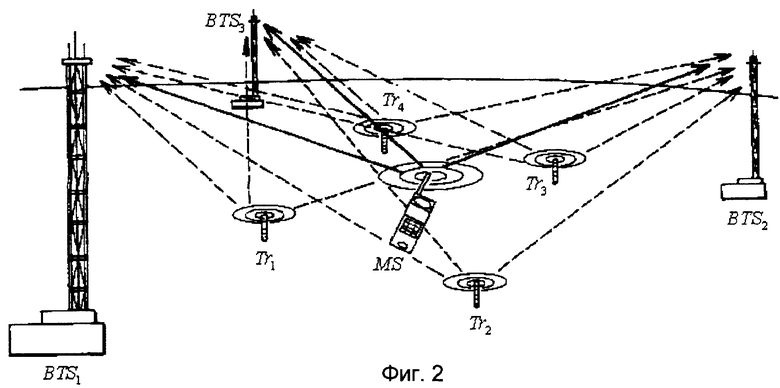
В этом способе предлагается установить в районе локации в известных точках множество излучателей, сформировав сеть из них, как показано на фиг.1 и фиг.2. Затем на базовых станциях сотовой сети (BTS1, BTS2, BTS3 и т.д.) измеряют ошибки от каждого излучателя (Tr1, Tr2, Tr3 и т.д.), связанные с непрямым распространением сигнала, и заносят их в базу данных. Таким образом, когда мобильная станция сделает запрос на определение местоположения, соседние базовые станции измерят задержки от мобильной станции и, используя заранее сформированную базу данных, скорректируют местоположение мобильной станции.
К основному недостатку данного способа формирования калибровочной таблицы можно отнести необходимость изменения аппаратной части базовой станции, а так же необходимость дополнительного оборудования для составления калибровочной таблицы. Необходимо отметить, что точность коррекции местоположения мобильной станции в данном способе зависит от расстояния между точками, которые брались для составления калибровочной таблицы. Для получения удовлетворительной точности необходимо, чтобы тестовые точки отстояли не более чем на 50 м, что с учетом размеров города приведет к огромному числу необходимых испытаний. Также невозможно применить сформированную таблицу в других городах, что существенно снижает общность решения. Хотелось бы отметить, что данный способ не применим при использовании в качестве навигационных сигналов сигналов от спутников.
Наиболее близким к заявляемому решению является способ, описанный в патенте US 5726659 "Multipath calibration in GPS pseudo range measurement", H 04 B 7/185, G 01 S 5/02, G 01 S 3/16, Mar. 10, 1998 [5]. Такой способ заключается в том, что:
- на мобильной станции принимают N сигналов локации, соответствующих каждому из N спутников,
- по принятым сигналам локации оценивают измерения псевдорасстояний и фазу от мобильной станции до каждого из N спутников,
- для каждого спутника определяют ошибку оценки измерения псевдорасстояния,
- удаляют из ошибок оценки измерения псевдорасстояния неизвестное рассогласование часов мобильной станции и глобального времени GPS, используя измерения псевдорасстояния и фазы,
- формируют базу данных многолучевых ошибок измерений псевдорасстояний по углу возвышения и азимуту, при этом все возможные значения углов разбивают на дискретные интервалы,
- значения многолучевых ошибок измерений псевдорасстояний заносят в базу данных,
- значения многолучевых ошибок измерений псевдорасстояний усредняют для каждого интервала угла возвышения и азимута, формируя средние значения многолучевых ошибок измерений псевдорасстояний,
- полученные средние значения многолучевых ошибок измерений псевдорасстояний сглаживают, получая непрерывную функцию многолучевой ошибки измерений псевдорасстояний от угла возвышения спутника и азимута.
Данный способ формирования калибровочной таблицы направлен на улучшение точности оценки местоположения мобильных станций. В этом способе формирования калибровочной таблицы предполагается, что мобильной станции доступны следующие измерения для всех спутников:
ρ1, р2 - измеренные псевдорасстояния на частотах L1 и L2 соответственно,
φ1, φ2 - измерение фазы несущей частоты L1 и L2 соответственно.
Используя данные измерения для j - ого спутника, можно записать следующие уравнения:




где
d - расстояние от приемника до спутника,
i - временная задержка ионосферы для L1 частоты,
t - задержка тропосферы,
m1, m2 - многолучевость в псевдорасстоянии для L1 и L2 частот соответственно,
В - смещение часов спутника,
b - смещение часов мобильной станции,
η1, η2 - шумовая ошибка в измерении псевдорасстояния для L1 и L2 частот соответственно,
N1, N2 - число циклов в измерении фазы несущей,
λ1, λ2 - длина волны L1 и L2 частот соответственно,
Далее определяют многолучевую ошибку в измерении псевдорасстояния для частоты L1 с точностью до неизвестного количества циклов фазы несущей, удаляя неизвестное рассогласование часов мобильной станции и глобального времени GPS следующим образом:
- определяют расхождение (Δlj) в измерениях псевдорасстояния и фазы несущей на частоте L1:

- определяют ионосферную задержку несущей:
Тогда псевдомноголучевую ошибку (многолучевую ошибку с точностью до неизвестного количества циклов в измерении фазы несущей) можно записать в следующем виде:
Как видно из приведенных выше уравнений величина μ1j не содержит неизвестное рассогласование часов. Перепишем приведенное выше выражение в явном виде

Как видно величина μ1j совпадает с величиной m1j с точностью до постоянной N1j·λ1. Шумовая ошибка η1j в данном выражении может быть уменьшена использованием различных методов фильтрации. Производя несложные математические преобразования, можно переписать приведенное выше уравнение с использованием новых переменных:

где  - среднее значение псевдомноголучевого смещения j-ого спутника относительно опорного спутника в точке cross over. Точка cross over характеризуется тем, что в данной точке траектории двух различных спутников пересекаются по азимуту и углу возвышения.
- среднее значение псевдомноголучевого смещения j-ого спутника относительно опорного спутника в точке cross over. Точка cross over характеризуется тем, что в данной точке траектории двух различных спутников пересекаются по азимуту и углу возвышения.
Величины  для различных углов возвышения и азимутов могут быть получены посредством многократных измерений в точках cross over для различных спутников. Далее, усредняя данные величины для одинаковых диапазонов углов возвышения и азимутов, определяют среднее значение псевдомноголучевого смещения
для различных углов возвышения и азимутов могут быть получены посредством многократных измерений в точках cross over для различных спутников. Далее, усредняя данные величины для одинаковых диапазонов углов возвышения и азимутов, определяют среднее значение псевдомноголучевого смещения  Это позволяет определить многолучевую ошибку с точностью до постоянного смещения для опорного спутника:
Это позволяет определить многолучевую ошибку с точностью до постоянного смещения для опорного спутника:
Несмотря на то, что в данные выражения входит постоянная составляющая, это не сказывается на точности определения местоположения приемника, т.к. данная величина постоянна для всех диапазонов углов возвышения и азимутов. Далее средние значения многолучевых ошибок сглаживают, применяя метод сферических гармоник:

где
θ, φ - угол возвышения и азимут соответственно,
Jl, Clm, Slm - калибровочные коэффициенты сферических гармоник,
Рlm(•) - полиномы Лежандра.
Таким образом, данный алгоритм позволяет получить среднее значение многолучевой ошибки измерений псевдорасстояний для фиксированного положения приемника с точностью до постоянной величины для различных углов возвышения и азимутов. Однако данный способ обладает рядом существенных недостатков:
- во первых, данный способ получения калибровочной таблицы позволяет получить только среднее значение многолучевой ошибки измерений псевдорасстояний, что не является точным (полным) описанием модели ошибки, даже в случае гауссовского закона распределения. Поэтому данный способ не позволяет использовать полную статистическую информацию о многолучевых ошибках измерений псевдорасстояний для определения местоположения мобильной станции, особенно в городских условиях;
- во-вторых, значение многолучевой ошибки измерений псевдорасстояний непосредственно зависит от местоположения мобильной станции. Поэтому при изменении местоположения мобильной станции невозможно использовать результаты, полученные с использованием калибровочной таблицы, рассчитанной для предыдущего местоположения мобильной станции, что существенно сужает область применения данного способа.
Задача, которую решает предлагаемое изобретение, заключается в повышении точности определения местоположения мобильной станции за счет использования среднего значения и дисперсии многолучевой ошибки измерений псевдорасстояний в зависимости от местоположения мобильной станции.
Технический результат достигается за счет того, что в способ оценки параметров многолучевых ошибок измерений псевдорасстояний для определения местоположения мобильной станции, заключающийся в том, что на мобильной станции принимают N сигналов локации, соответствующих каждому из N спутников, по принятым сигналам локации оценивают измерения псевдорасстояний от мобильной станции до каждого из N спутников, для каждого спутника определяют ошибку оценки измерений псевдорасстояния, в оцененных ошибках измерений псевдорасстояний удаляют неизвестное временное рассогласование часов мобильной станции, формируют базу данных многолучевых ошибок измерений псевдорасстояний в зависимости от угла возвышения спутника, при этом все возможные значения угла возвышения разбивают на фиксированные дискретные интервалы, сглаживают полученные параметры многолучевых ошибок измерений псевдорасстояний, получая непрерывную функцию параметров многолучевой ошибки измерений псевдорасстояний в зависимости от угла возвышения спутника,
согласно изобретению дополнительно введены следующие операции:
- по принятым сигналам локации оценивают отношение сигнал - шум для каждого сигнала от каждого из N спутников,
- при этом все возможные значения отношения сигнал - шум разбивают на фиксированные дискретные интервалы,
- ошибку оценки измерений псевдорасстояния определяют с точностью до временного рассогласования часов мобильной станции, как разность между оцененным псевдорасстоянием и расстоянием от спутника до истинного положения мобильной станции,
- удаление неизвестного рассогласования часов мобильной станции осуществляют путем формирования разности многолучевых ошибок измерений псевдорасстояний, полученных в один и тот же момент времени,
- при формировании базы данных многолучевых ошибок измерений псевдорасстояний используют разности этих многолучевых ошибок измерений псевдорасстояний, при этом учитывают тип местности и отношение сигнал - шум,
- запоминают в базе данных значения разности многолучевых ошибок измерений псевдорасстояний,
- по занесенным в память значениям разности многолучевых ошибок измерений псевдорасстояний оценивают параметры многолучевых ошибок измерений псевдорасстояний для каждого типа местности, угла возвышения спутника и отношения сигнал - шум на каждом дискретном интервале,
- кроме того, непрерывную функцию параметров многолучевой ошибки измерений псевдорасстояний определяют по типу местности и отношению сигнал - шум.
Оценивать параметры многолучевых ошибок измерений псевдорасстояний можно, например, в соответствии с гауссовским или экспоненциальным или гауссовским и экспоненциальным законами распределения.
Под параметрами многолучевых ошибок измерений псевдорасстояний понимают среднее значение и дисперсию многолучевых ошибок.
Сопоставительный анализ способа оценки параметров многолучевых ошибок измерений псевдорасстояний для определения местоположения мобильной станции с прототипом показывает, что предлагаемое изобретение существенно отличается от прототипа тем, что позволяет значительно повысить точность и надежность определения местоположения мобильной станции.
Сопоставительный анализ заявляемого способа с другими техническими решениями в данной области техники не позволил выявить признаков, заявленных в отличительной части формулы изобретения. На основании этого можно сделать вывод о том, что заявляемый способ оценки параметров многолучевых ошибок измерений псевдорасстояний для определения местоположения мобильной станции отвечает критериям "новизна", "техническое решение задачи", "существенные отличия" и обладает неочевидностью решения.
Графические материалы, используемые в описании:
Фиг.1 - пример расположения излучателей в сети сотовой связи.
Фиг.2 - пример распространения сигнала локации мобильной станции.
Фиг.3 - вариант реализации предлагаемого способа.
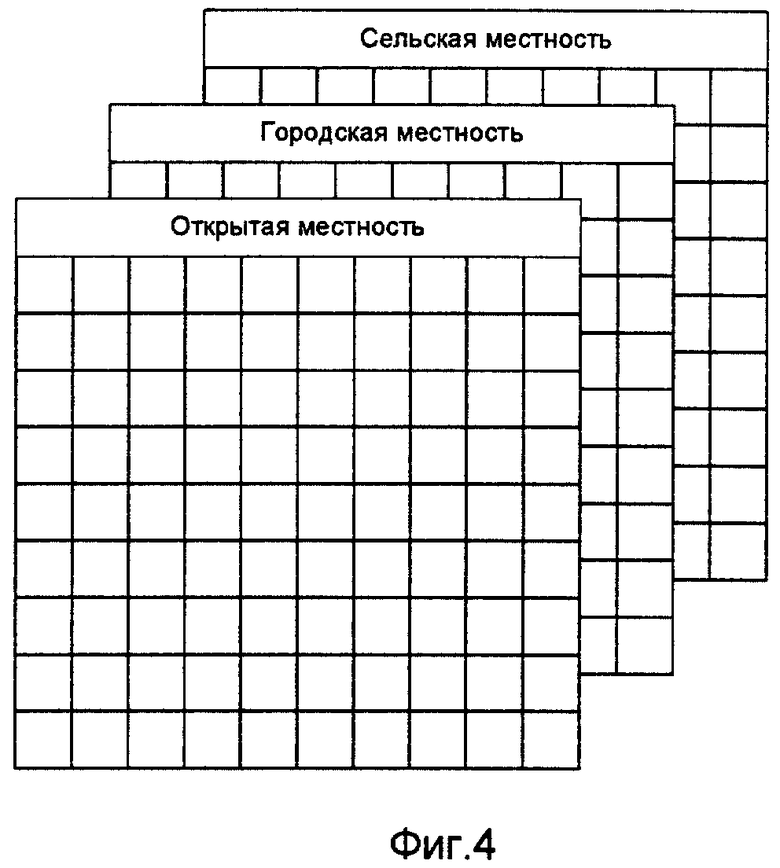
Фиг.4 - пример базы данных многолучевых ошибок измерений псевдорасстояний, соответствующих различным типам местности.
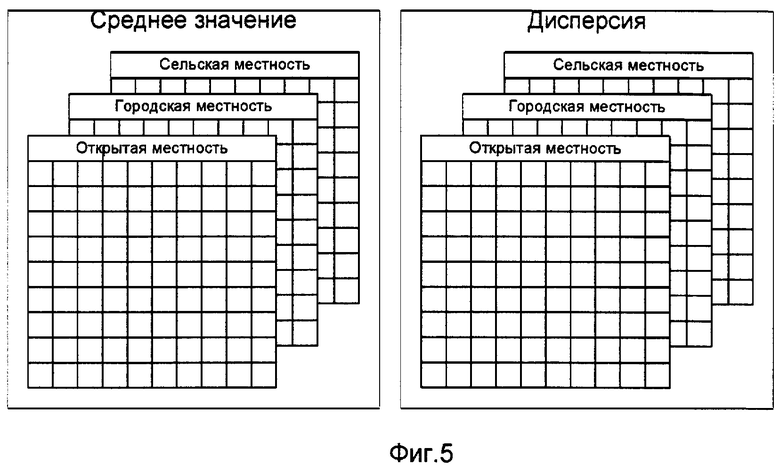
Фиг.5 - пример базы данных параметров многолучевых ошибок измерений псевдорасстояний, соответствующих различным типам местности.
Предлагаемый способ заключается в следующем:
- на мобильной станции принимают N сигналов локации, соответствующих каждому из N спутников,
- по принятым сигналам локации оценивают измерения псевдорасстояний от мобильной станции до каждого из N спутников,
- по принятым сигналам локации оценивают отношение сигнал - шум для каждого сигнала от N спутников,
- для каждого спутника определяют многолучевую ошибку оценки измерений псевдорасстояния с точностью до рассогласования часов мобильной станции, как разность между оцененным псевдорасстоянием и расстоянием до истинного местоположения мобильной станции,
- в оцененных ошибках измерений псевдорасстояний удаляют неизвестное рассогласование часов мобильной станции, формируя разности многолучевых ошибок измерений псевдорасстояний, полученных в один и тот же момент времени,
- формируют базу данных разности многолучевых ошибок измерений псевдорасстояний с учетом типа местности, угла возвышения спутника и отношения сигнал - шум, при этом все возможные значения угла возвышения и отношения сигнал - шум разбивают на фиксированные дискретные интервалы,
- значения разности многолучевых ошибок измерений псевдорасстояний запоминают,
- по занесенным в базу данных значениям разности многолучевых ошибок измерений псевдорасстояний оценивают параметры многолучевых ошибок измерений псевдорасстояний для каждого типа местности, угла возвышения спутника и отношения сигнал - шум на каждом дискретном интервале,
- полученные параметры многолучевых ошибок измерений псевдорасстояний сглаживают, получая непрерывную функцию параметров многолучевой ошибки измерений псевдорасстояний от угла возвышения спутника, отношения сигнал - шум и типа местности.
Оценку параметров многолучевых ошибок измерений псевдорасстояний можно осуществлять, например, в соответствии с гауссовским или экспоненциальным или гауссовским и экспоненциальным законами распределения.
Под параметрами многолучевых ошибок измерений псевдорасстояний понимают, например, среднее значение и дисперсию многолучевых ошибок измерений псевдорасстояний.
Способ прототип основан на построении калибровочной таблицы в зависимости от угла возвышения и азимута спутника. В предлагаемом решении формируют базу данных многолучевых ошибок измерений псевдорасстояний по типу местности, углу возвышения спутника и отношению сигнал - шум для принятого сигнала спутника. Использование при формировании базы данных многолучевых ошибок измерений псевдорасстояний значений угла возвышения спутника и отношения сигнал - шум для принятого сигнала спутника для различных типов местности позволит наиболее эффективно учесть среду распространения сигналов спутников. Такой принцип построения базы данных многолучевых ошибок измерений псевдорасстояний позволяет учесть параметры не только многолучевой, но и шумовой ошибок в измерениях псевдорасстояний. Для уменьшения объема данных, необходимого для статистического анализа, необходимо разбить весь диапазон возможных значений угла возвышения спутника и отношения сигнал - шум на интервалы. Однако эти интервалы должны быть относительно малыми, чтобы данные были однородными.
В предлагаемом изобретении предполагается, что при построении базы данных многолучевых ошибок измерений псевдорасстояний информация о точном местоположении мобильной станции доступна. Тогда ошибки в измерениях псевдорасстояний могут быть записаны следующим образом:
где prj i - измерение псевдорасстояния до i-ого спутника в j-ом тесте,
τj - рассогласование часов мобильной станции и глобального времени GPS в j-ом тесте,
 - координаты i-ого спутника в j-ом тесте.
- координаты i-ого спутника в j-ом тесте.
Под тестом понимаются измерения псевдорасстояний, проводимые в один и тот же момент времени.
Для построения базы данных многолучевых ошибок измерений псевдорасстояний необходимо провести множество измерений на мобильной станции и сформировать базу данных, которая содержит количество спутников в тесте, координаты этих спутников, псевдорасстояния до этих спутников, отношение сигнал - шум и угол возвышения для каждого спутника.
Далее, проанализировав данные, выбрать опорные диапазоны значений для угла возвышения спутника (αA) и отношения сигнал - шум (СN0A) по максимальному количеству спутников, отношения сигнал - шум и углы возвышения которых попадают в данный диапазон, для заданного типа местности. Затем выбрать тесты, в которых имеется хотя бы одно измерение спутников со значениями отношения сигнал - шум и углом возвышения, попадающие в опорные диапазоны значений. В выбранных тестах сформировать ошибки следующего вида:
где

 - измерение псевдорасстояния и координаты спутника с углов возвышения αk и отношением сигнал - шум CN0l в j-ом тесте,
- измерение псевдорасстояния и координаты спутника с углов возвышения αk и отношением сигнал - шум CN0l в j-ом тесте,

 - измерение псевдорасстояния и координаты спутника из опорного диапазона значений угла возвышения спутника и отношения сигнал - шум в j-ом тесте.
- измерение псевдорасстояния и координаты спутника из опорного диапазона значений угла возвышения спутника и отношения сигнал - шум в j-ом тесте.
Полученные таким образом многолучевые ошибки будут являться разностью многолучевых ошибок в измерениях псевдорасстояний. Так же необходимо отметить, что в данных многолучевых ошибках измерений псевдорасстояний не содержится неизвестное рассогласование часов мобильной станции и глобального времени GPS. Поэтому имеется возможность параллельного анализа ошибок из различных тестов. Для этого формируют новую базу данных, объединив ошибки, параметры которых попадают в одинаковые интервалы, по углу возвышения спутника и отношению сигнал - шум. Тогда для каждого типа местности и сочетания диапазонов значений по углу возвышения и отношению сигнал - шум появляется возможность сформировать среднее значение и дисперсию ошибки 
 Затем оценивают дисперсию и среднее значение для опорной группы, измерения которой вычитали
Затем оценивают дисперсию и среднее значение для опорной группы, измерения которой вычитали  Традиционно многолучевые ошибки в измерениях псевдорасстояний описывают гауссовским законом распределения. Поэтому многолучевые ошибки измерений псевдорасстояний для сформированных групп можно полностью описать математическим ожиданием и дисперсией, которые вычисляются следующим образом:
Традиционно многолучевые ошибки в измерениях псевдорасстояний описывают гауссовским законом распределения. Поэтому многолучевые ошибки измерений псевдорасстояний для сформированных групп можно полностью описать математическим ожиданием и дисперсией, которые вычисляются следующим образом:

так как ошибки в сформированных группах представляли собой разности многолучевых ошибок измерений псевдорасстояний:

где  и
и  истинные ошибки.
истинные ошибки.
Необходимо отметить, что математическое ожидание для всех групп вычисляют с точностью до математического ожидания вычитаемой группы. Однако этот факт не влияет на точность оценки местоположения мобильной станции, так как данная величина войдет в неизвестное рассогласование часов мобильной станции.
Полученные таким образом параметры позволяют сформировать базу данных многолучевых ошибок измерений псевдорасстояний. Для того чтобы получить значение параметров многолучевых ошибок измерений псевдорасстояний от непрерывных значений отношения сигнал - шум и угла возвышения, каждый из параметров в базе данных многолучевых ошибок измерений псевдорасстояний можно интерполировать методами сглаживания поверхности. Повторяя данную операцию для различных типов местности (открытое пространство, городские условия и т.д.), можно получить статистическое описание многолучевых ошибок измерений псевдорасстояний для каждого типа местности. Сформированная таким образом база данных многолучевых ошибок измерений псевдорасстояний позволит оценить параметры многолучевых ошибок измерений псевдорасстояний в зависимости от типа местности, угла возвышения спутника и отношения сигнал - шум для принятого сигнала спутника, что в свою очередь приведет к значительному улучшению точности оценки местоположения мобильной станции.
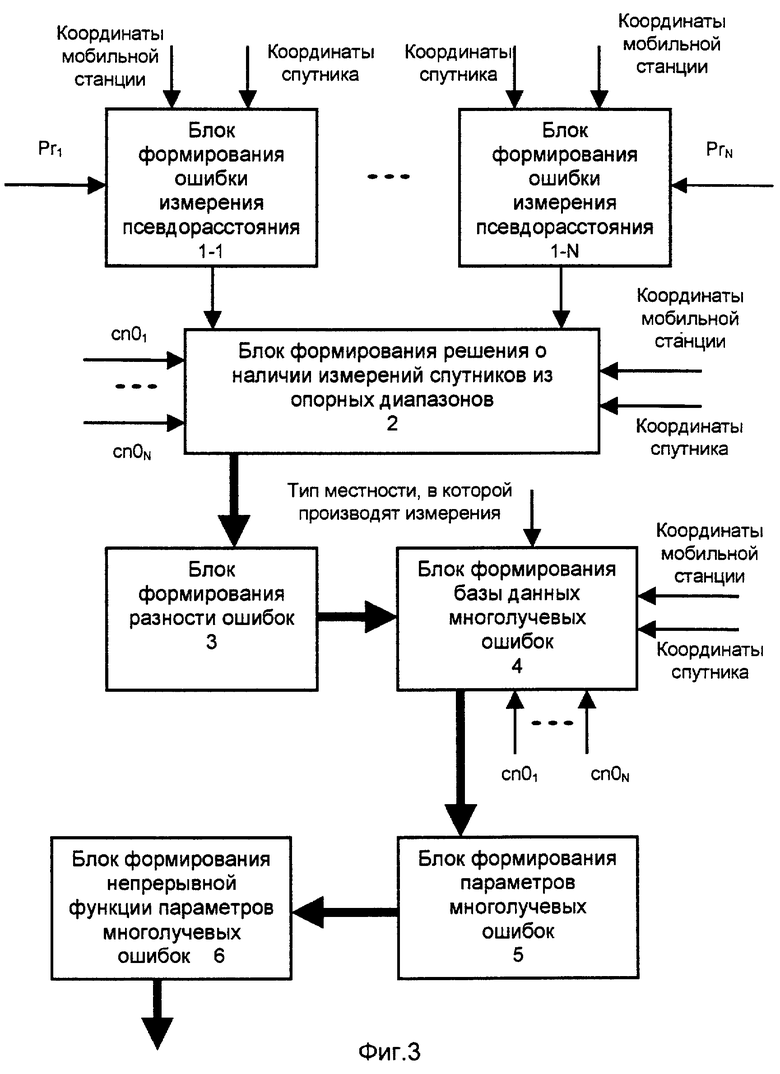
Вариант устройства, реализующего предлагаемый способ, представлен на фиг.3.
Устройство содержит N блоков формирования ошибки измерения псевдорасстояния 1-1 - 1-N, блок формирования решения о наличии измерений спутников из опорных диапазонов 2, блок формирования разности ошибок 3, блок формирования базы данных многолучевых ошибок 4, блок формирования параметров многолучевых ошибок 5 и блок формирования непрерывной функции параметров многолучевых ошибок 6.
N блоков формирования ошибки измерения псевдорасстояния 1-1 - 1-N предназначены для вычисления ошибки в измерении псевдорасстояния с точностью до неизвестного рассогласования часов мобильной станции и глобального времени GSP. На первые входы каждого из блоков формирования ошибки измерения псевдорасстояния 1-1 - 1-N поступают значения измеренных псевдорасстояний Pr1 - PrN, на вторые входы - координаты мобильной станции, на третьи входы - координаты спутника. На выходе блока формирования ошибки измерения псевдорасстояния 1-1 - 1-N формируется величина, которая вычисляется в соответствии со следующим правилом:

где
pr - измерение псевдорасстояния,
 - координаты спутника,
- координаты спутника,
 - координаты мобильной станции.
- координаты мобильной станции.
С выхода каждого блока формирования ошибки измерения псевдорасстояния 1-1 - 1-N сформированные ошибки измерения псевдорасстояний поступают на соответствующие первые входы блока формирования решения о наличии измерений спутников из опорных диапазонов 2.
На вторые входы блока формирования решения о наличии измерений спутников из опорных диапазонов 2 поступают координаты мобильной станции, на третьи входы - координаты спутника, на четвертые входы поступают значения отношений сигнал - шум.
Блок формирования решения о наличии измерений спутников из опорных диапазонов 2 предназначен для анализа поступающих на вход отношений сигнал - шум и координат спутников. Для каждого спутника вычисляется угол возвышения спутника следующим образом:

где
 - координаты мобильной станции,
- координаты мобильной станции,
 - координаты спутника.
- координаты спутника.
Если среди спутников содержится спутник, отношение сигнал - шум и угол возвышения которого лежат в диапазонах [сn0A, сn0A+Δcn0A] и [αA,αA+ΔαA], то значения ошибок подаются на выход блока формирования решения о наличии измерений спутников из опорных диапазонов 2. В противном случае данные измерения далее не обрабатываются.
Выходные сигналы с блока формирования решения о наличии измерений спутников из опорных диапазонов 2, т.е. значения многолучевых ошибок, поступают на входы блока формирования разности ошибок 3.
Блок формирования разности ошибок 3 предназначен для удаления временного рассогласования из ошибок оценки псевдорасстояния. Временное рассогласование удаляется посредством вычитания из всех ошибок оценки псевдорасстояния ошибки спутника из опорного диапазона:
Таким образом, на выходе данного блока формируются разностные ошибки измерения псевдорасстояний.
Сформированные разности ошибок измерений псевдорасстояний с выходов блока формирования разности ошибок 3 поступают на первые входы блока формирования базы данных многолучевых ошибок 4. На вторые входы блока формирования базы данных многолучевых ошибок 4 поступает информация о типе местности, в которой проводятся измерения. На третьи входы блока формирования базы данных многолучевых ошибок 4 поступают координаты мобильной станции, на четвертые входы - координаты спутников, а на пятые входы - значения отношений сигнал - шум.
Блок формирования базы данных многолучевых ошибок 4 предназначен для формирования базы данных разностных ошибок измерений псевдорасстояний в зависимости от типа местности, угла возвышения спутника и отношения сигнал - шум для сигналов спутников. База данных многолучевых ошибок измерений псевдорасстояний представляет собой набор матриц, каждая из которых соответствует различным типам местности, например открытой местности, сельской местности, городской местности (см. фиг.4).
Каждая ячейка данной базы данных характеризуется диапазоном значений угла возвышения спутника и отношений сигнал - шум, т.е. в ячейку k заносится ошибка i-ого спутника, если угол возвышения спутника и отношение сигнал - шум для спутника попадают в диапазоны αi∈[αk, αk+1] и сn0i∈[сn0k, сn0k+1], которыми характеризуется данная ячейка. Таким образом, блок формирования базы данных 4 распределяет и запоминает поступающие значения разностных ошибок измерений псевдорасстояний по различным ячейкам в соответствии со значением сигнал - шум и углом возвышения спутника, для которого эти ошибки получены. Угол возвышения i-ого спутника рассчитывается следующим образом:

Значения в базе данных накапливаются до тех пор, пока минимальное количество данных в какой-либо ячейке не станет больше заранее заданного числа (например, 1000). Как только накапливается достаточное количество данных в какой-либо ячейке, то данные из этой ячейки сразу с выхода блока формирования базы данных 4 поступают в блок формирования параметров многолучевых ошибок 5.
Блок формирования параметров многолучевой ошибки 5 предназначен, например, для вычисления среднего значения и дисперсии многолучевой ошибки измерений псевдорасстояний для значений каждой ячейки, поступающих с блока формирования базы данных 4. Для значений каждой ячейки базы данных многолучевой ошибки измерений псевдорасстояний вычисляется среднее значение и дисперсия следующим образом:

где
ζ - значения ошибок в ячейке (l,k) для заданного типа местности,
Nl,k - количество значений ошибок в ячейке (l,k) для заданного типа местности.
Далее значения дисперсий пересчитываются в соответствии со следующим правилом:
где DA - дисперсия ошибок в ячейке, соответствующей опорному диапазону.
Таким образом, на выходе блока вычисления параметров многолучевой ошибки 5 формируется база данных, которую можно представить так, как показано на фиг.5. Эта база данных параметров многолучевой ошибки измерений псевдорасстояний представляет собой, например, матрицу среднего значения для открытой местности, городской местности и сельской местности и матрицу дисперсии для открытой местности, городской местности и сельской местности. Значения матриц среднего значения и дисперсии, например, построчно поступают на входы блока формирования непрерывной функции параметров многолучевых ошибок 6.
Блок формирования непрерывной функции параметров многолучевых ошибок 6 предназначен для формирования непрерывной функции параметров многолучевых ошибок измерений псевдорасстояний от угла возвышения спутника и отношения сигнал - шум для заданного типа местности. Этот блок формирует коэффициенты сглаживания. Данные коэффициенты существенно уменьшают объем данных, необходимых для построения непрерывной функции параметров многолучевых ошибок измерений псевдорасстояний в зависимости от угла возвышения спутника, отношения сигнал - шум и типа местности. Коэффициенты сглаживания могут быть получены различными известными из литературы способами, см., например, Бахвалов Н.С., Жидков Н.П., Кобельков Г.М. "Численные методы", - М., Лаборатория Базовых Знаний, 2000 г., раздел 2 [6]. Значения коэффициентов будут зависеть от способа, который будет применяться при сглаживании дискретных значений параметров многолучевых ошибок измерений псевдорасстояний. Рассмотрим более подробно один из способов получения коэффициентов сглаживания на примере среднего значения для открытой местности. Полученная матрица представляет собой набор дискретных значений среднего значения многолучевой ошибки измерений псевдорасстояний для различных интервалов значений угла возвышения и отношения сигнал - шум. В качестве опорных точек, например, возьмем середины интервалов. Таким образом, заданы средние значения многолучевой ошибки измерений псевдорасстояний при дискретных значениях угла возвышения и отношения сигнал - шум:
В качестве функциональной зависимости среднего значения многолучевой ошибки измерений псевдорасстояний от угла возвышения и отношения сигнал - шум может быть принята зависимость следующего вида:

Количество коэффициентов wm1,m2 должно быть меньше количества ячеек в матрице. Коэффициенты wm1,m2 могут быть найдены различными методами, например методом наименьших квадратов, см., например, [6] стр.203-206.
За счет применения подобной процедуры для различных матриц на выходе блока формирования непрерывной функции параметров многолучевых ошибок 6 могут быть получены наборы коэффициентов для среднего значения и дисперсии многолучевой ошибки измерений псевдорасстояний для различных типов местности. В дальнейшем, используя выбранную функциональную зависимость и данные коэффициенты, можно получить значения параметров многолучевых ошибок для различных углов возвышения спутника и отношений сигнал - шум в зависимости от типов местности.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОЦЕНКИ ПАРАМЕТРОВ МНОГОЛУЧЕВЫХ ОШИБОК ИЗМЕРЕНИЙ ПСЕВДОРАССТОЯНИЙ ДЛЯ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ МОБИЛЬНОЙ СТАНЦИИ | 2004 |
|
RU2267796C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ АБОНЕНТСКОЙ МОБИЛЬНОЙ СТАНЦИИ | 2002 |
|
RU2248669C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ АБОНЕНТСКОЙ МОБИЛЬНОЙ СТАНЦИИ, УСТАНОВЛЕННОЙ НА ТРАНСПОРТНОМ СРЕДСТВЕ | 2004 |
|
RU2272356C1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ПОВЫШЕНИЯ С ПОМОЩЬЮ ИЗМЕРЕНИЙ ТОЧНОСТИ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ РАДИОТЕХНИЧЕСКИМ СПОСОБОМ | 2003 |
|
RU2381520C2 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ПОВЫШЕНИЯ С ПОМОЩЬЮ ИЗМЕРЕНИЙ ТОЧНОСТИ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ РАДИОТЕХНИЧЕСКИМ МЕТОДОМ | 2009 |
|
RU2494411C2 |
| ЗАВИСЯЩЕЕ ОТ РАССТОЯНИЯ УМЕНЬШЕНИЕ ОШИБКИ ПРИ ОПРЕДЕЛЕНИИ МЕСТОПОЛОЖЕНИЯ В РЕЖИМЕ КИНЕМАТИКИ РЕАЛЬНОГО ВРЕМЕНИ | 2008 |
|
RU2479855C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ПОДВИЖНОГО ОБЪЕКТА ПОСРЕДСТВОМ ГИБРИДНОЙ НАВИГАЦИОННОЙ СИСТЕМЫ (ВАРИАНТЫ) | 2008 |
|
RU2399065C2 |
| СПОСОБ ПОСАДКИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ С ИСПОЛЬЗОВАНИЕМ СПУТНИКОВОЙ НАВИГАЦИОННОЙ СИСТЕМЫ | 2008 |
|
RU2385469C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ МОБИЛЬНОГО АБОНЕНТА | 2000 |
|
RU2183021C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ МОБИЛЬНОГО АБОНЕНТА ВНУТРИ ПОМЕЩЕНИЙ | 2003 |
|
RU2312461C2 |
Изобретение относится к области радиолокации и может быть использовано в сотовых системах связи для увеличения точности и надежности определения местоположения мобильной станции. Технический результат состоит в повышении точности и надежности определения местоположения мобильной станции за счет использования среднего значения и дисперсии многолучевой ошибки измерений псевдорасстояний в зависимости от местоположения мобильной станции. Повышение точности определения местоположения мобильной станции достигается за счет использования базы данных многолучевых ошибок измерений псевдорасстояний, т.е. для оценки местоположения мобильной станции предлагается использовать статистическую информацию о характере многолучевых ошибок измерений псевдорасстояний, полученную по предварительным испытаниям. Сформированная база данных позволит оценить параметры многолучевых ошибок измерений псевдорасстояний в зависимости от типа местности, угла возвышения спутника и отношения сигнал - шум для принятого сигнала спутника, что, в свою очередь, приведет к значительному улучшению точности оценки местоположения мобильной станции. 3 з.п. ф-лы, 5 ил.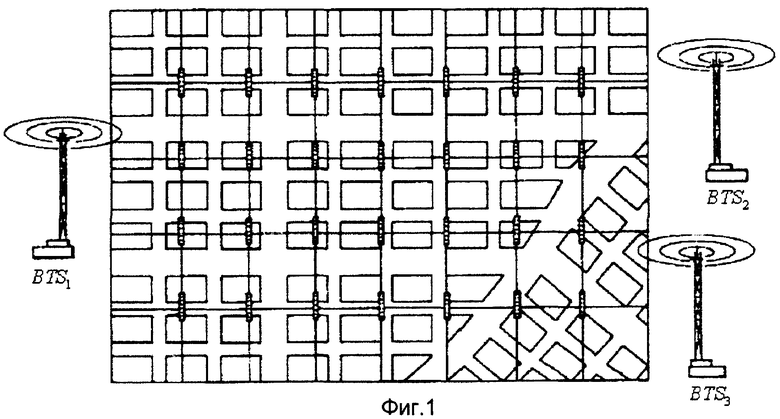
| US 5726659, 10.03.1998 | |||
| RU 2001104812 A, 20.05.2003 | |||
| СПОСОБ ИСКЛЮЧЕНИЯ ВЛИЯНИЯ МНОГОЛУЧЕВОГО РАСПРОСТРАНЕНИЯ В ПРИЕМНИКЕ ДЛЯ ПРИЕМА СИГНАЛОВ МЕСТОПОЛОЖЕНИЯ ОТ СПУТНИКА И ПРИЕМНИК ДЛЯ ПРИЕМА СИГНАЛОВ МЕСТОПОЛОЖЕНИЯ ОТ СПУТНИКА | 1996 |
|
RU2178953C2 |
| US 5841399, 24.11.1998. | |||

