Предлагаемое изобретение относится к области радиолокации и может быть использовано в сотовых системах связи для определения местоположения мобильной станции.
Постоянное расширение сферы услуг в системах мобильной сотовой связи делает особенно актуальным решение задачи определения местоположения мобильной абонентской станции (МС). В настоящее время определение местоположения объекта выполняется с помощью оценки параметров сигналов, распространяющихся между МС и каждой из нескольких базовых станций (БС). В качестве измеряемых параметров часто используют время прихода сигнала. Измеренные параметры, а также известные координаты каждой из БС позволяют вычислить координаты МС. Примерами подобных способов локации могут служить методы, описанные в работах: "Wireless Location in CDMA Cellular Radio Systems" by James J.Gaffery Jr./University of Cincinnati/ Cincinnati, OH, USA. / Kluwer Academic Publishers. 2000. / Electronic Services: http://www.wkap.nl, Sections 1.3.1, 2.1[1]; "Subscriber location in CDMA cellular networks" by J. Gaffery,/ IEEE transactions on vehicular technology, vol.47, no. 2, may 1998 [2]; в патентах: WO 98/14018 "Method and system for mobile location estimation" by M. Wylie, April 2, 1998 [3]; US 5732354: "Method and apparatus for determining the location of mobile telephone", March 24, 998 [4]; US 5736964 "Method and apparatus for location finding in CDMA system", April 7, 997 [5]; US 6161018. "Method and System for Estimating a Subscriber's Location in a Wireless Communication System Service Area", Motorola, Inc., Dec. 12, 2000 [6].
В сотовых системах связи локация может выполняться как по сигналам, распространяющимся от МС к БС, то есть по прямому каналу, так и по обратному каналу. Серьезной проблемой при этом является проблема видимости. При значительном удалении некоторых БС от объекта локации уровень соответствующего сигнала на входе приемника оказывается низким и недостаточным для оценки времени его распространения. В сотовых системах связи с кодовым разделением каналов (CDMA), таких, как IS-95, 3GPP2, существует режим регулировки мощности, который в предусмотренных системой режимах связи не позволяет увеличить мощность сигнала для выполнения локации.
Один из способов решения этой проблемы состоит в том, что осуществляют локацию по обратному каналу - от МС к БС. При этом на МС команду, инструктирующую ее повысить мощность. Такая процедура предусмотрена, например, в решении [5]. В случаях экстренных вызовов предлагается дополнительно увеличить мощность сигнала МС. Недостатком такого решения является значительное увеличение уровня помех, создаваемых сигналом локации, так как в системах связи с кодовым разделением каналов (CDMA) сигналы разных пользователей представляют помеху друг для друга.
Для ограничения уровня помех во время локации прибегают к специальной процедуре, в процессе которой МС передает последовательность коротких сигналов с нарастающей мощностью. При этом предусматривается возможность начать передачу с низкого уровня и увеличивать ее от сигнала к сигналу до достижения необходимого уровня. В стандарте IS-95 такая процедура называется "функция повышения мощности" (Power Up Function), сокращенно - PUF, a передаваемые сигналы - PUF пробами (см. стандарт IS-95. TIA/EIA IS-95. "Mobile Station-Base Station Compatibility Standard for Dual-Mode Wideband Spread-Spectrum Cellular Systems". Telecommunication Industry Association, July 1993)[7]. Однако при отсутствии соответствующего алгоритма управления уровень помех во время процедуры локации будет сохраняться, а может даже и увеличиться.
Другой серьезной проблемой локации является погрешность измерения времени прихода сигнала, связанная с отсутствием прямого луча распространения сигнала. В этом случае в точке приема имеется только сигнал, отраженный от каких-либо препятствий и прошедший расстояние большее, чем расстояние между станциями. Если погрешность, связанная с шумом или федингом, может быть уменьшена до необходимого значения за счет повышения мощности передаваемого сигнала, то погрешность, связанная с отсутствием прямого луча, сохраняется и при высоком уровне мощности сигнала. Поэтому один из наиболее важных аспектов борьбы с ошибками в определении местоположения МС - это минимизация ошибки локации, связанной с отсутствием прямого луча в канале распространения.
Один из способов повышения точности локации в условиях отсутствия прямого луча распространения сигнала описан в документе [3]. В этом способе предлагается в процессе локации определять наличие или отсутствие прямого луча и в соответствии с принятым решением проводить коррекцию измерений. С этой целью на каждой из БС, принимающих участие в локации, проводится последовательность измерений расстояния до МС. Решающей величиной для определения наличия или отсутствия прямого луча распространения предлагается использовать величину дисперсии оценки этих измерений. Полученная величина дисперсии сравнивается с порогом, которым служит величина дисперсии, обусловленная шумом. Если решающая величина превышает порог, то принимается решение об отсутствии прямого луча. В этом же документе [3] предлагается способ коррекции измерений в случае принятия решения об отсутствии прямого луча.
Недостатком такого решения является то, что принятие решения об отсутствии прямого луча основано на степени отклонения от среднего значения измеренных оценок расстояния. Однако возможны ситуации, когда больших отклонений не будет даже при отсутствии прямого луча. Такая ситуация может возникнуть, например, при локации на местности с однородной застройкой в городских условиях. В подобных условиях точность этого метода будет низкой. Другим недостатком такого решения является большое время, необходимое для проведения локации. Это связано с тем, что обнаружение факта отсутствия прямого луча проводится по результатам последовательного измерения расстояния. Таких измерений требуется много. В примерах, приведенных в [3], говорится о последовательности в 100-200 измерений.
Наиболее близким к заявляемому решению является способ локации, описанный в патенте US 5903844 "Method and apparatus for determining remote unit location in a communication system", Motorola, Inc., May 11, 1999 [8], который заключается в следующем:
- выбирают активные БС, которые будут участвовать в определении местоположения МС,
- передают на МС команду начать передачу последовательности сигналов локации, при этом указывают необходимые параметры этой последовательности (например, время начала передачи, мощность первого сигнала последовательности, шаг увеличения мощности),
- передают на активные БС команду начать прием последовательности сигналов локации, при этом указывают соответствующие параметры этой последовательности, и начинают процедуру определения местоположения МС, при этом
- на МС формируют и передают последовательность сигналов локации в соответствии с полученными параметрами;
- на каждой активной БС последовательно принимают каждый из последовательности сигналов локации и формируют оценку времени его прихода,
- определяют местоположение МС,
- после приема и формирования оценки времени прихода каждого сигнала локации на всех БС, принимают решение о завершении или продолжении процедуры определения местоположения МС, при этом
- если принято решение о продолжении процедуры, то возобновляют процедуру определения местоположения,
- если принято решение о завершении процедуры, то определяют местоположение МС и завершают процедуру, передавая на МС команду о прекращении передачи сигналов локации и сформированную оценку местоположения.
Недостатком данного алгоритма является, во-первых, несовершенная организация процедуры. Критерием завершения локации служит критерий достаточности собранных данных, который определяется сразу после оценки времени прихода сигнала локации на каждой из БС.
Принятие на этом этапе решения о достаточности собранных данных может оказаться ошибочным. Это связано с тем, что результирующая ошибка локации зависит от многих факторов: от условий распространения, от способа формирования оценок координат, от положения МС относительно БС. Влияние этих факторов на точность локации лучше всего может быть учтено, если решение о достаточности собранных данных принимается с учетом сформированной оценки местоположения. Это может быть выполнено только после формирования этой оценки.
Пусть, например, решение о достаточности собранных данных принимается по отношению сигнал-помеха, таким образом, что если отношение сигнал-помеха превышает некоторый порог на каждой из базовых станций, то принимается решение, что данных достаточно и процедуру определения местоположения можно завершить. При этом порог для отношения сигнал-помеха необходимо устанавливать для наихудших условий распространения, чтобы получить необходимую точность локации. В более благоприятных условиях придется также ожидать достижения этого высокого порога. При этом будет передана неоправданно высокая энергия PUF проб.
Другим недостатком данного решения является возможность значительных погрешностей локации. Это связано с тем, что местоположение определяется по времени приема сигнала. Однако при отсутствии прямого луча распространения время приема сигнала локации не отражает расстояния между МС и БС, так как непрямой луч проходит большее расстояние.
Задачей, которую решает заявляемое изобретение, является достижение максимальной эффективности, то есть максимальной точности локации при минимальной суммарной мощности сигналов, передаваемых за время процедуры, и коррекция погрешностей, связанных с отсутствием прямого луча распространения сигнала.
Задача решается за счет того, что в способ определения местоположения МС [8], заключающийся в том, что:
- выбирают активные БС, которые будут участвовать в определении местоположения МС,
- передают на МС команду начать передачу последовательности сигналов локации, при этом указывают необходимые параметры этой последовательности,
- передают на активные БС команду начать прием последовательности сигналов локации, при этом указывают соответствующие параметры этой последовательности, и начинают процедуру определения местоположения МС, при этом
- на МС формируют и передают последовательность сигналов локации в соответствии с полученными параметрами,
- на каждой активной БС последовательно принимают каждый из последовательности сигналов локации и формируют оценку времени его прихода,
- определяют местоположение МС,
- принимают решение о завершении или продолжении процедуры определения местоположения МС, при этом
- если принято решение о продолжении процедуры, то возобновляют определение местоположения,
- если принято решение о завершении процедуры, завершают процедуру, передавая на МС команду о прекращении передачи сигналов локации и сформированную оценку местоположения.
Дополнительно введены следующие операции:
- корректируют оценку времени прихода сигнала, при этом
- формируют оценку фактора Райса для данного сигнала локации,
- сравнивают оценку фактора Райса с порогом,
- если оценка фактора Райса не превышает порога, то принимают решение об отсутствии прямого луча на данной БС и корректируют оценку времени прихода сигнала, формируя величину коррекции, пропорциональную среднему радиусу зоны объектов рассеяния около МС, и вычитая величину коррекции из сформированной оценки времени прихода сигнала локации,
- если оценка фактора Райса превышает порог, то в качестве скорректированной оценки используют сформированную оценку времени прихода сигнала локации,
- местоположение МС определяют с учетом скорректированных оценок времени прихода сигнала локации всех активных БС,
- решение о завершении или продолжении процедуры определения местоположения МС принимают, учитывая результаты (точность установленного местоположения).
Причем оценка фактора Райса может быть сформирована, например, как отношение среднего квадрата амплитуды сигнала к среднему квадрату отклонения амплитуды от среднего значения.
При приеме первого сигнала из последовательности сигналов локации решение о завершении процедуры определения местоположения МС принимают по оценкам отношений сигнала к помехе, если эти оценки превышают необходимый порог для всех активных БС, в противном случае принимают решение о продолжении процедуры.
При приеме второго и последующих сигналов из последовательности сигналов локации полученную оценку местоположения МС сравнивают с оценкой, полученной по предыдущему сигналу, если расстояние между сравниваемыми оценками меньше порога, то принимают решение о завершении процедуры, в противном случае принимают решение о продолжении процедуры.
Порог может быть установлен, исходя из максимально возможного перемещения МС за интервал между последовательными сигналами локации.
Сопоставительный анализ способа определения местоположения МС с прототипом показывает, что заявляемое изобретение существенно отличается от прототипа, так как позволяет повысить точность локации МС в условиях отсутствия прямого луча распространения сигнала и скорректировать погрешности определения местоположения МС.
Анализ других технических решений в данной области техники не привел к выявлению признаков, сходных с теми, которые приведены в данном описании и в отличительной части формулы изобретения.
Графические материалы, поясняющие данное изобретение:
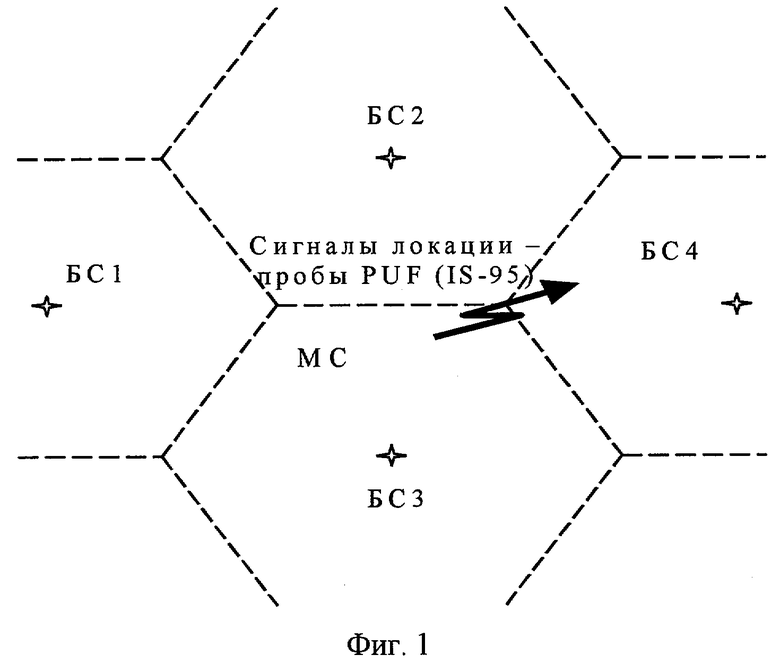
Фиг.1 - пример организации системы мобильной сотовой связи.
Фиг.2 - функциональная схема устройств, выполняющих локацию.
Фиг.3 - алгоритм реализации предлагаемого способа определения
местоположения МС.
Фиг.4 - вариант выполнения устройства локации БС.
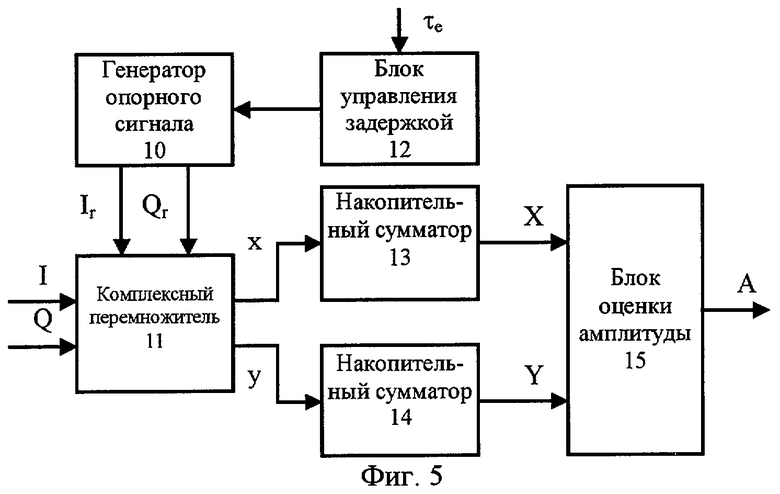
Фиг.5 - вариант выполнения коррелятора.
Фиг.6 - алгоритм работы блока оценки фактора Райса.
Фиг.7 - алгоритм работы блока коррекции.
Фиг.8 - вариант выполнения центрального устройства локации.
Заявляемый способ определения местоположения МС заключается в следующем:
- выбирают активные БС, которые будут участвовать в определении местоположения МС,
- передают на мобильную станцию команду начать передачу последовательности сигналов локации, при этом указывают необходимые параметры этой последовательности (например, время начала передачи, мощность первого сигнала последовательности, шаг наращивания мощности),
- передают на активные базовые станции команду начать прием последовательности сигналов локации, при этом указывают соответствующие параметры этой последовательности, и начинают процедуру определения местоположения мобильного абонента, при этом
- на мобильной станции формируют и передают последовательность сигналов локации в соответствии с полученными параметрами,
- на каждой активной базовой станции последовательно принимают каждый из последовательности сигналов локации и формируют оценку времени его прихода,
- корректируют оценку времени прихода сигнала, при этом
- формируют оценку фактора Райса для данного сигнала локации,
- сравнивают оценку фактора Райса с порогом,
- если оценка фактора Райса не превышает порога, то принимают решение об отсутствии прямого луча на данной базовой станции и корректируют оценку времени прихода сигнала, формируя величину коррекции, пропорциональную среднему радиусу зоны объектов рассеяния около мобильной станции, и вычитая величину коррекции из сформированной оценки времени прихода сигнала локации,
- если оценка фактора Райса превышает порог, то в качестве скорректированной оценки используют сформированную оценку времени прихода сигнала локации,
- местоположение мобильной станции определяют с учетом скорректированных оценок времени прихода сигнала локации всех активных базовых станций,
- учитывая определенное местоположение, принимают решение о завершении или продолжении процедуры определения местоположения мобильного абонента, при этом
- если принято решение о продолжении процедуры, то возобновляют определение местоположения,
- если принято решение о завершении процедуры, завершают процедуру, передавая на мобильную станцию команду о прекращении передачи сигналов локации и сформированную оценку местоположения.
Оценка фактора Райса может быть сформирована, например, как отношение среднего квадрата амплитуды сигнала к среднему квадрату отклонения амплитуды от среднего значения.
При приеме первого сигнала из последовательности сигналов локации решение о завершении процедуры определения местоположения МС принимают по оценкам отношений сигнала к помехе, если эти оценки превышают необходимый порог для всех активных БС, в противном случае принимают решение о продолжении процедуры.
При приеме второго и последующих сигналов из последовательности сигналов локации полученную оценку местоположения МС сравнивают с оценкой, полученной по предыдущему сигналу, если расстояние между сравниваемыми оценками меньше порога, то принимают решение о завершении процедуры, в противном случае принимают решение о продолжении процедуры.
Порог может быть установлен, исходя из максимально возможного перемещения МС за интервал между последовательными сигналами локации.
Предлагаемый способ определения местоположения МС применим в условиях системы мобильной сотовой связи (Фиг.1), в состав которой входят несколько базовых станций (БС1,...БС4) с фиксированным местоположением и мобильные абонентские станции (МС). Между МС и БС возможен обмен сообщениями. Примером такой системы может служить современная система сотовой мобильной радиотелефонной связи, описанная в стандарте IS-95 (TIA/EIA IS-95 "Mobile Station-Base Station Compatibility Standard for Dual-Mode Wideband Spread-Spectrum Cellular Systems". Telecommunication Industry Association, July 1993)[9]. В данном стандарте для определения местоположения МС предусмотрена процедура PUF.
В процессе процедуры PUF МС передает последовательность коротких сигналов с нарастающей мощностью. При этом появляется возможность начать процедуру локации на низкой мощности сигнала и увеличивать мощность от сигнала к сигналу до достижения необходимого уровня. Передаваемые сигналы локации называются "PUF пробами". Реализация предлагаемого способа возможна именно на основе такой процедуры PUF. На фиг.2 представлена функциональная схема устройств, выполняющих локацию. При этом в определении местоположения МС участвуют устройства локации 3 каждой из БС, получающие сигналы с выходов соответствующих приемопередатчиков 2, центральное устройство локации 4, а также приемопередатчик 1 МС, формирующий и передающий сигналы локации. Расположение центрального устройства локации 4 зависит от структуры системы. Например, оно может располагаться в центре управления БС. Между центральным устройством 4 и устройствами локации 3 БС предполагается наличие обмена сообщениями с помощью радиосигналов или по кабелю.
Алгоритм реализации заявляемого способа представлен схематически на фиг.3.
При поступлении в центральное устройство 4 запроса на определение местоположения какой-либо МС выбирают активные БС, то есть те, которые будут участвовать в локации. Одной из активных БС служит, как правило, БС, обслуживающая данную МС. Другие БС, наиболее подходящие для участия в локации, можно определить, например, по оценкам мощностей передаваемых ими пилот-сигналов и временам распространения этих пилот-сигналов до МС. Эти измерения выполняются на МС в рамках процедуры перехода МС из зоны обслуживания одной БС в другую. В стандарте IS - 95В такая процедура называется английским термином "Handoff (см. ЕIА/Т1А/IS-95 "Mobile Station-Base Station Compatibility Standard for Dual-Mode Wideband Spread Spectrum Cellular Systems") [10]. Результаты измерений передаются на обслуживающую БС и хранятся в базе данных. При выборе активных БС для участия в локации предпочтение должно быть отдано БС с наибольшим уровнем мощности пилот-сигнала и наименьшей величиной времени его распространения.
После выбора активных БС центральное устройство локации 4 формирует и передает на МС сообщение с командой начать передачу последовательности PUF проб. При этом указываются необходимые параметры этой последовательности: мощность первой пробы, шаг наращивания мощности, количество проб, интервал между пробами. Параметры могут определяться в соответствии с международным стандартом [10].
Одновременно на активные БС передаются сообщения с командами начать прием последовательности PUF проб и также указывают соответствующие параметры этой последовательности. МС, получив команду, формирует и передает последовательность PUF проб. Формирование и передача таких сигналов локации также могут быть выполнены согласно IS-95 [10].
На каждой из БС функции локации выполняются устройством локации 3, вариант выполнения которого показан на фиг.4. В данном варианте реализации устройства локации 3 рассматривается случай, когда обработка выполняется в области нулевой частоты. При этом могут применяться цифровые методы обработки сигналов. В области нулевой частоты сигнал представлен в виде синфазной и квадратурной составляющих I и Q (См. например, Andrew J.Viterbi "CDMA Principles of Spread Spectrum Communication". Addison-Wesley Communication Series. 1995) [11]. Обработка входного сигнала на радиочастоте, перенос в область нулевой частоты и преобразование в цифровую форму выполняется в приемопередатчике 2. Синфазный и квадратурный сигналы I и Q с выхода приемопередатчика 2 поступают на вход устройства локации 3.
На каждой из БС последовательно принимают каждый из сигналов последовательности и оценивают время его задержки. Оценка времени задержки сигнала локации выполняется блоком оценки задержки 6. В блоке оценки задержки 6 может быть реализован любой известный метод, используемый при поиске и синхронизации в системах связи (См. например, В. И. Журавлев. Поиск и синхронизация в широкополосных системах. М.: Радио и связь, 1986) [12].
Оценка времени τе задержки, сформированная на выходе блока оценки задержки 6, поступает на вход блока коррекции 9. Для коррекции оценки задержки в устройстве локации 3 БС (Фиг.4) используются: блок коррекции 9, коррелятор 5 и блок оценки фактора Райса 8.
Принцип коррекции основан на обнаружении факта отсутствия прямого луча, которое выполняется по оценке фактора Райса. Фактором или коэффициентом Райса называют отношение мощности отраженных компонент к мощности рассеянных компонент (См. "Parallel acquisition of Spread-Spectrum Signals with Antenna Diversity" by R.R.Rick and L.B.Milstein IEEE Trans/ on Comm. Vol. 45. NO. 8. August 1997 [12], а также www.deas.harvard.edu/~jones/csciel 29/prop_models/propagation.html [13]). Оценка фактора Райса может служить индикатором отсутствия прямого луча распространения сигнала. Так как в отсутствие прямого луча сигнал, как правило, имеет большую часть рассеянных компонент и, наоборот, при наличии прямого луча увеличивается относительная доля отраженных компонент, что приводит к изменению величины фактора Райса. Таким образом, решение об отсутствии прямого луча может быть принято в случае, если оценка величины К ниже некоторого порога.
Оценка фактора Райса может быть сформирована на основании следующих положений. Средний квадрат амплитуды сигнала и дисперсия выражаются через величину фактора Райса К следующими формулами из [12]

Здесь а2 и σ2 - параметры распределения, определяющие среднюю амплитуду сигнала дисперсии; Е/Iо - отношение сигнал-помеха; К - фактор Райса. Из этих выражений видно, что приблизительную оценку фактора Райса К при Е/Iо>>1 можно получить как  или
или

где Е(А) и Е(А2) - средние значения амплитуды и квадрата амплитуды сигнала соответственно. Постоянный коэффициент в этой формуле опущен, так как эта оценка сравнивается с порогом и любой коэффициент может быть учтен соответствующим выбором порога. Таким образом, для оценки фактора Райса необходимо получить последовательность оценок амплитуды сигнала А, а затем сформировать отношение (2).
Для формирования последовательности оценок амплитуды сигнала служит коррелятор 5, блок-схема которого показана на фиг.5. Коррелятор 5 состоит из генератора опорного сигнала 10, блока управления задержкой 12, комплексного перемножителя 11, двух накопительных сумматоров 13 и 14, блока оценки амплитуды 15.
Оценка амплитуды сигнала формируется в корреляторе 5 следующим образом. Задержка опорного сигнала генератора 10 устанавливается в соответствии с оценкой τе, полученной в блоке оценки задержки 6. Отсчеты синфазной и квадратурной составляющих сигнала I и Q перемножаются с соответствующими отсчетами синфазной и квадратурной составляющих опорного сигнала Ir и Qr. Перемножение осуществляется по правилам перемножения комплексных чисел таким образом, что на двух выходах комплексного перемножителя 11 формируются действительная и мнимая части комплексного произведения (I+i·Q)·(Ir+i·Qr) соответственно
Последовательность отсчетов каждого из этих сигналов суммируется в соответствующем накопительном сумматоре 13 или 14. Суммирование выполняется на интервале когерентности входного сигнала. Для сигналов PUF проб IS-95 таким интервалом служит период 208,333 мкс. В стандарте IS-95 он соответствует периоду модулирующей функции Уолша. Выходные значения накопительных сумматоров 13 и 14 X, Y поступают на вход блока оценки амплитуды сигнала 15. Алгоритм работы блока оценки амплитуды соответствует формуле

Оценки А, сформированные на последовательных интервалах когерентности, поступают на вход блока оценки фактора Райса 8. Алгоритм работы блока оценки коэффициента Раиса 8 представлен на фиг.6 и может быть реализован программно. Алгоритм состоит в вычислении величин  а затем формировании оценки фактора Райса К в соответствии с формулой (2). В этих выражениях М - количество отсчетов амплитуды, участвующих в формировании оценки фактора Райса.
а затем формировании оценки фактора Райса К в соответствии с формулой (2). В этих выражениях М - количество отсчетов амплитуды, участвующих в формировании оценки фактора Райса.
Сформированная оценка фактора Райса поступает на вход блока коррекции 9. Алгоритм работы блока коррекции 9 представлен на фиг.7. Оценка фактора Райса сравнивается с порогом KTHR. Порог может быть выбран экспериментально (при полевых испытаниях или моделировании) и установлен постоянным. Если оценка фактора Райса не превышает порога, то принимается решение об отсутствии прямого луча и необходимости коррекции сформированной оценки задержки τе.
Известно, что погрешность измерения расстояния, обусловленная отсутствием прямого луча распространения, обусловлена радиусом зоны объектов рассеяния около мобильной станции (см.[2]). Поэтому в качестве величины компенсации можно принять величину, пропорциональную радиусу области объектов рассеяния:
Δt=a·r.
Оценка радиуса объектов рассеяния r около МС может быть проведена на основании известной карты местности сотовой системы и по примерной оценке местоположения МС. Таким образом, формируется скорректированная оценка времени задержки: τc=τe+Δt.
Если оценка фактора Райса превысила порог, то решение об отсутствии прямого луча и необходимости коррекции не принимается и на выход блока коррекции передается оценка, сформированная в блоке оценки задержки τc=τе.
Таким образом, формируются скорректированные оценки времени задержки PUF пробы на каждой из активных базовых станций. Скорректированные оценки задержек передаются в центральное устройство локации 8.
В состав устройства локации БС 3 входит также блок оценки отношения сигнал-помеха 7. Данная оценка используется в центральном устройстве локации 8 для принятия решения о завершении локации.
Алгоритм работы блока оценки отношения сигнал-помеха 7 может быть следующим. Оценка мощности сигнала может быть получена по амплитуде сигнала А, сформированной на выходе коррелятора 5. Оценка мощности помехи может быть также сформирована с помощью коррелятора 5 (фиг.5). При этом задержку генератора опорного сигнала 10 необходимо последовательно устанавливать на различные значения, отличающиеся от оценки τе более чем на длительность одного элементарного символа. При этом каждый раз необходимо измерять значения А на выходе блока оценки амплитуды 15. Просуммировав квадратичные значения амплитуды и разделив на количество измерений, можно оценить мощность помехи. Отношение сформированных таким образом оценок мощностей сигнала и помехи даст необходимую оценку отношения сигнал-помеха.
Вариант выполнения центрального устройства локации 8 представлен на фиг.8. Оно состоит из блока оценки координат 16, блока принятия решения о завершении локации 17 и блока управления 18.
На вход блока оценки координат 16 МС поступают скорректированные оценки времени задержки PUF пробы, сформированные на каждой из БС, а также координаты БС. В системе связи IS-95 базовые станции работают синхронно. Поэтому время задержки PUF пробы, измеренное на каждой из них, отражает время распространения сигнала от МС до соответствующей базовой станции. Для определения координат может быть использован любой известный метод, например, метод пересечения окружностей или гипербол [1], или метод минимизации среднеквадратической ошибки [2].
После формирования оценок координат МС принимают решение о завершении или о необходимости продолжения процедуры определения местоположения.
Это решение принимается в блоке принятия решения о завершении локации 17. При принятии решения о завершения локации необходимо учитывать два противоположных требования: 1) точность локации, 2) минимизация помех, создаваемых последовательностью сигналов локации. Исходя из этих соображений, передачу PUF проб необходимо остановить, когда дальнейшее увеличение мощности проб не приводит к улучшению точности оценки местоположения МС.
Данный принцип был реализован как один из вариантов в следующем алгоритме принятия решения о завершении локации.
1. Определяют номер сигнала локации.
2. Если сигнал локации первый, то оценивают отношение сигнал-помеха для каждой БС.
Если отношение сигнал-помеха превышает необходимый порог на всех БС, то принимают полученную оценку за истинные координаты МС и передают на МС команду прекратить передачу последовательности сигналов локации. В противном случае продолжают передавать и принимать последовательность сигналов локации.
3. Если сигнал локации не первый, то полученную оценку местоположения сравнивают с оценкой, полученной для предыдущего сигнала из последовательности сигналов локации. Если расстояние между оценками местоположения МС меньше заданного порога, то принимают полученную оценку за истинные координаты МС и передают на МС команду прекратить передачу последовательности сигналов локации, порог может быть задан, исходя из максимально возможного перемещения МС за интервал между пробами.
В противном случае, то есть если расстояние между оценками местоположения МС выше порога, продолжают передавать и принимать последовательность сигналов локации. Данный алгоритм учитывает сформированные оценки местоположения МС и позволяет сократить общую энергию сигналов, излучаемых за время локации, независимо от условий распространения сигнала или способа формирования оценок координат.
Управляет работой блока оценки координат 16 и блока принятия решения о завершении локации 17 блок управления 18. Блок управления 18, как правило, представляет собой контроллер с произвольным числом входов и выходов, которое зависит от решаемой задачи. Выполнять такие блоки можно на современных процессорах любого типа TMS 320Схх, Motorolla 56 ххх, Intel и т.д.
Таким образом, заявляемое решение позволяет достичь максимальной эффективности, то есть максимальной точности локации при минимальной суммарной мощности сигналов, передаваемых за время процедуры. Это достигается за счет того, что, во-первых, вводится этап коррекции измерений времен прихода сигнала локации на каждую из БС. Коррекция основана на обнаружении факта отсутствия прямого луча распространения и вычитании из полученной оценки величины компенсации, пропорциональной среднему радиусу r зоны объектов рассеяния около МС. Во-вторых, решение о завершении локации принимается после формирования оценки координат МС. При этом используются как данные, имеющиеся сразу после приема сигнала локации на каждой из БС, так и сформированные оценки координат.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ МОБИЛЬНОГО АБОНЕНТА | 1999 |
|
RU2157548C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ МОБИЛЬНОГО АБОНЕНТА | 2000 |
|
RU2183021C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ АБОНЕНТСКОЙ МОБИЛЬНОЙ СТАНЦИИ | 2002 |
|
RU2248669C2 |
| СПОСОБ ОЦЕНКИ ПАРАМЕТРОВ МНОГОЛУЧЕВЫХ ОШИБОК ИЗМЕРЕНИЙ ПСЕВДОРАССТОЯНИЙ ДЛЯ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ МОБИЛЬНОЙ СТАНЦИИ | 2004 |
|
RU2267796C2 |
| СИСТЕМА И СПОСОБ ОБЕСПЕЧЕНИЯ СИНХРОНИЗАЦИИ БАЗОВЫХ СТАНЦИЙ В АСИНХРОННОЙ СИСТЕМЕ МОБИЛЬНОЙ СВЯЗИ МНОЖЕСТВЕННОГО ДОСТУПА С КОДОВЫМ РАЗДЕЛЕНИЕМ КАНАЛОВ | 1999 |
|
RU2241312C2 |
| УСТРОЙСТВО И СПОСОБ ДЛЯ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ МОБИЛЬНОЙ СТАНЦИИ В СИСТЕМЕ МОБИЛЬНОЙ СВЯЗИ | 1999 |
|
RU2179371C1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ПРОВЕРКИ УСТРОЙСТВ, ПОЗВОЛЯЮЩИХ ОПРЕДЕЛЯТЬ МЕСТОПОЛОЖЕНИЕ С ИСПОЛЬЗОВАНИЕМ ВСПОМОГАТЕЛЬНЫХ ДАННЫХ | 2003 |
|
RU2328016C2 |
| СПОСОБ ОЦЕНКИ ПАРАМЕТРОВ МНОГОЛУЧЕВЫХ ОШИБОК ИЗМЕРЕНИЙ ПСЕВДОРАССТОЯНИЙ ДЛЯ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ МОБИЛЬНОЙ СТАНЦИИ | 2004 |
|
RU2278394C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ МОБИЛЬНЫХ СТАНЦИЙ | 2005 |
|
RU2297718C1 |
| СПОСОБ ПРИЕМА-ПЕРЕДАЧИ МНОГОЛУЧЕВЫХ СИГНАЛОВ (ВАРИАНТЫ) И УСТРОЙСТВО ПРИЕМА-ПЕРЕДАЧИ СИГНАЛОВ С КОДОВЫМ РАЗДЕЛЕНИЕМ КАНАЛОВ (ВАРИАНТЫ) | 1998 |
|
RU2153776C2 |






Изобретение относится к области радиолокации и может быть использовано в сотовых системах связи для определения местоположения мобильной станции (МС), что является весьма актуальным при постоянном расширении сферы услуг в системах сотовой мобильной связи. Решается задача достижения максимальной точности локации при минимальной суммарной мощности сигналов, передаваемых за время процедуры локации, обеспечивается коррекция погрешностей, связанных с отсутствием прямого луча распространения сигнала. Результат достигается благодаря тому, что, во-первых, решение о завершении локации принимается после формирования оценки координат МС. При этом используются как данные, имеющиеся сразу после приема сигнала локации на каждой базовой станции (БС), так и сформированные оценки координат. Во-вторых, за счет введения этапа коррекции измеренных времен прихода сигнала локации. Коррекция основана на обнаружении факта отсутствия прямого луча распространения и вычитании из полученной оценки величины компенсации, пропорциональной среднему радиусу r зоны объектов рассеяния около МС. 4 з.п.ф-лы, 8 ил.
| US 5903844 A, 11.05.1999 | |||
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ МОБИЛЬНОГО АБОНЕНТА | 1999 |
|
RU2157548C1 |
| СПОСОБ ОБНАРУЖЕНИЯ МЕСТОПОЛОЖЕНИЯ МОБИЛЬНОГО ТЕРМИНАЛА В СОТОВОЙ ТЕЛЕКОММУНИКАЦИОННОЙ СИСТЕМЕ И ЛОКАТОР МОБИЛЬНОГО ТЕРМИНАЛА | 1996 |
|
RU2150793C1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ОЦЕНКИ КОВАРИАЦИОННОЙ МАТРИЦЫ ПРИ РЕШЕНИИ МЕСТОПОЛОЖЕНИЯ МЕТОДОМ ВЗВЕШЕННЫХ НАИМЕНЬШИХ КВАДРАТОВ | 1997 |
|
RU2154282C2 |
| Дорожная спиртовая кухня | 1918 |
|
SU98A1 |
| US 5732354 A, 24.03.1998 | |||
| US 5736964 A, 07.04.1998 | |||
| US 6161018 A, 12.12.2000. | |||

