Изобретение относится к области транспортного машиностроения, в частности к рулевым управлениям транспортных средств с передними и задними управляемыми колесами.
Известна система рулевого управления транспортного средства с передними и задними управляемыми колесами, содержащая распределитель рулевого управления, гидравлически соединенный с гидронасосом, гидробаком и посредством рабочей гидролинии - со штоковой полостью исполнительного гидроцилиндра, кинематически связанного с передними управляемыми колесами, поршневая полость которого соединена с поршневой полостью исполнительного гидроцилиндра, кинематически связанного с задними управляемыми колесами (Колесное шасси 5937 и 5939, Воениздат, 1986, с. 58).
Основными недостатками системы является низкая устойчивость движения транспортного средства на высоких скоростях и наличие системы тяг, соединяющих переднюю и заднюю рулевые трапеции и ухудшающие компоновочные свойства транспортного средства.
Наиболее близкой по технической сущности к заявляемой системе является система рулевого управления транспортного средства с передними и задними управляемыми колесами, содержащая распределитель рулевого управления, гидравлически соединенный с гидронасосом, гидробаком и посредством рабочей гидролинии со штоковой полостью исполнительного гидроцилиндра, кинематически связанного с передними управляемыми колесами, поршневая полость которого гидравлически соединена через пятилинейный двухпозиционный распределитель с поршневой полостью исполнительного гидроцилиндра, кинематически связанного с задними управляемыми колесами. Двухпозиционный распределитель кинематически связан с датчиком скорости, что позволяет на высоких скоростях движения отключать управление задними колесами (SU 943063, кл. B 62 D 5/06, опубл. 19.07.1982).
Недостатком данной системы является недостаточная маневренность транспортного средства на высоких скоростях движения, вызванная отключением задних управляемых колес и управлением транспортным средством только c помощью задних управляемых колес.
Изобретение направлено на повышение устойчивости движения и маневренности транспортных средств с передними и задними управляемыми колесами.
Решение поставленной задачи достигается тем, что рулевое управление транспортного средства содержит основной четырехлинейный трехпозиционный распределитель рулевого управления, двумя линиями гидравлически соединенный с насосом и баком и посредством двух других гидролиний - с полостями исполнительного гидроцилиндра, кинематически связанного c передними управляемыми колесами c одной стороны и полостями исполнительного гидроцилиндра, кинематически связанного с задними управляемыми колесами и со стабилизатором нейтрального положения задних управляемых колес c другой, и снабжено четырехлинейным трехпозиционным вспомогательным распределителем c открытой нейтралью, управляемым датчиком угла поворота рулевого колеса и стабилизатором нейтрального положения задних управляемых колес, причем вспомогательный распределитель первой гидролинией через основной распределитель соединен с насосом, второй - с баком, а третьей и четвертой - со штоковой и поршневой полостями исполнительного гидроцилиндра задних управляемых колес соответственно, при этом вторая гидролиния вспомогательного распределителя через открытую нейтраль соединена с его четвертой гидролинией, а первая - с третьей, а в двух других позициях вспомогательного распределителя полости исполнительного гидроцилиндра задних управляемых колес через основной распределитель соединены с насосом и баком для обеспечения возможности изменения направления поворота задних управляемых колес в противофазе с передними управляемыми колесами.
Заявляемое рулевое управление отличается наличием дополнительно введенного элемента: вспомогательного распределителя с открытой нейтралью, имеющим привод от датчика угла поворота. Вспомогательный распределитель и датчик угла поворота рулевого колеса известны, однако при их введении в указанной связи с остальными элементами, рулевое управление проявляет новые свойства. В частности, в результате того, что вспомогательный распределитель, имеющий открытую нейтраль, первой гидролинией через основной распределитель соединен с насосом, второй - с баком, а третьей и четвертой - со штоковой и поршневой полостями исполнительного гидроцилиндра задних управляемых колес соответственно, поворот задних и передних управляемых колес происходит следующим образом. В диапазоне угла поворота передних управляемых колес до значения 0,1-0,2 рад поворот задних управляемых колес происходит одновременно с передними в том же направлении (синфазно), а при достижении передними колесами угла 0,1-0,2 рад задние колеса меняют направление своего поворота и поворачиваются в противофазе с передними. Это возможно благодаря тому, что датчик угла поворота рулевого колеса выполнен в виде постоянного магнита, установленного на подвижной части рулевого привода и трех магнитоуправляемых контактов, закрепленных на корпусе транспортного средства вдоль траектории перемещения постоянного магнита таким образом, что постоянный магнит расположен против магнитоуправляемого контакта при нейтральном положении передних управляемых колес и против одного из двух крайних магнитоуправляемых контактов при повороте рулевого колеса на угол, соответствующий повороту передних управляемых колес на угол 0,1-0,2 рад. Каждый из двух крайних магнитоуправляемых контактов соединен с S-входами двух D-триггеров, R-входы которых соединены с центральным магнитоуправляемым контактом. Прямые выходы триггеров соединены посредством усилителей тока с электронными ключами, которые, в свою очередь, соединены с электромагнитами управления вспомогательного распределителя. Это позволяет поворачивать задние управляемые колеса в сторону, противоположную повороту передних колес и возвращать их в нейтральное положение. Кроме того, в качестве механизма, возвращающего задние колеса в нейтральное положение, используется стабилизатор, связанный со штоком исполнительного гидроцилиндра задних управляемых колес.
На чертеже представлена схема управления колесного транспортного средства.
Рулевое управление колесного транспортного средства содержит насос 1, гидравлически связанный с гидробаком 2 и с первой гидролинией основного трехпозиционного распределителя 3. Вторая гидролиния трехпозиционного распределителя 3 гидравлически связана с баком 2. Третья гидролиния основного распределителя 3 гидравлически соединена с поршневой полостью исполнительного механизма 4 передних управляемых колес и со второй гидролинией вспомогательного распределителя 5. Вторая гидролиния вспомогательного распределителя 5 через открытую нейтраль гидравлически связана с его четвертой гидролинией и поршневой полостью исполнительного гидроцилиндра 6 задних управляемых колес. Четвертая гидролиния основного распределителя 3 гидравлически связана со штоковой полостью исполнительного механизма 4 передних управляемый колес и с первой гидролинией вспомогательного распределителя 5. Первая гидролиния вспомогательного распределителя 5 через открытую нейтраль гидравлически связана с его третьей гидролинией и штоковой полостью исполнительного гидроцилиндра 6 задних управляемых колес. Основной распределитель 3, кроме того, кинематически связан с рулевым колесом 7, штоком исполнительного механизма 4 передних управляемых колес и передними управляемыми колесами 8. Исполнительный механизм 6 задних управляемых колес кинематически связан со стабилизатором нейтрального положения 9 задних управляемых колес и задними управляемыми колесами 10. Вспомогательный распределитель 5 управляется датчиком угла поворота рулевого колеса 11, который представляет собой постоянный магнит, установленный на подвижной части рулевого привода и три магнитоуправляемых контакта, закрепленных на корпусе транспортного средства вдоль траектории перемещения постоянного магнита таким образом, что постоянный магнит расположен против магнитоуправляемого контакта при нейтральном положении передних управляемых колес и против одного из двух крайних магнитоуправляемых контактов при повороте рулевого колеса на угол, соответствующий повороту передних управляемых колес на угол 0,1-0,2 рад. Каждый из двух крайних магнитоуправляемых контактов соединен с S-входами двух D-триггеров, R-входы которых соединены с центральным магнитоуправляемым контактом. Прямые выходы D-триггеров соединены посредством усилителей тока с электронными ключами, которые, в свою очередь, соединены с электромагнитами управления вспомогательного распределителя.
Рулевое управление транспортного средства работает следующим образом.
При прямолинейном движении и в диапазоне поворота передних управляемых колес до значения 0,1-0,2 рад. центральный магнитоуправляемый контакт датчика 11 угла поворота рулевого колеса замкнут, а крайние магнитоуправляемые контакты разомкнуты. В результате этого R-входы D-триггеров соединены с "землей" и D-триггеры находятся в сброшенном состоянии и на их выходах присутствует сигнал "О". Следовательно, электронные ключи заперты, а электромагниты вспомогательного распределителя 5 обесточены и вспомогательный распределитель 5 находится в нейтральном положении, соединяя штоковую и поршневую полости исполнительного механизма 6 задних управляемых колес со штоковой и поршневой полостями исполнительного механизма 4 передних управляемых колес. Это обеспечивает прямолинейное движение и синфазный c передними поворот задних управляемых колес 10 в диапазоне поворота передних колес до величины 0,1-0,2 рад.
При повороте рулевого колеса 7, управляющее воздействие передается на основной распределитель 3, который в соответствии с направлением поворота соединяет насос 1 и бак 2 с рабочими полостями исполнительного механизма 4 передних управляемых колес. Происходит поворот передних управляемых колес 8, в процессе которого подвижные детали рулевого привода перемещаются относительно корпуса транспортного средства. При этом перемещается и постоянный магнит датчика 11 угла поворота рулевого колеса. При повороте управляемых колес на угол 0,1 рад. постоянный магнит размыкает центральный магнитоуправляемый контакт, и в зависимости от направления поворота передних управляемых колес 8 замыкает один из крайних магнитоуправляемых контактов. В результате на S-входы одного из D-триггеров поступает сигнал, принудительно переключая D-триггер в единичное состояние. Вследствие этого выходной сигнал триггера через усилитель воздействует в зависимости от направления поворота на один из электронных ключей, открывает его и тем самым включает один из электромагнитов управления вспомогательного распределителя 5. Вспомогательный распределитель 5 соединяет рабочие полости исполнительного механизма 6 задних управляемых колес через включенный основной распределитель 3 с насосом 1 и баком 2 таким образом, что задние управляемые колеса меняют направление своего поворота, поворачиваются в противофазе c передними до достижения максимального угла поворота. Такой алгоритм поворота задних колес обеспечивает необходимую по условиям безопасности устойчивость движения и маневренность транспортного средства.
Возврат передних 8 и задних 10 управляемых колес в нейтральное положение вызывает перемещение постоянного магнита датчика угла поворота рулевого колеса в сторону центрального магнитоуправляемого контакта. При замыкании центрального магнитоуправляемого контакта произойдет сброс D-триггера, и следовательно, отключение электромагнита вспомогательного распределителя 5. В результате этого вспомогательный распределитель 5 под воздействием пружинного стабилизатора 9 занимает нейтральное положение.
Заявляемое изобретение направлено на повышение устойчивости движения и маневренности транспортного средства с передними и задними управляемыми колесами.
Изобретение относится к рулевым управлениям транспортных средств с передними и задними управляемыми колесами и гидроприводом. Рулевое управление колесного транспортного средства содержит трехпозиционный распределитель, гидравлически связанный с насосом, гидробаком и с рабочими полостями исполнительных гидроцилиндров передних и задних управляемых колес. Основной распределитель, кроме того, кинематически связан с рулевым колесом и штоком исполнительного механизма передних управляемых колес. Исполнительный механизм задних управляемых колес кинематически связан со стабилизатором нейтрального положения задних управляемых колес. Вспомогательный распределитель с открытой нейтралью установлен в гидролинии между основным распределителем и исполнительным гидроцилиндром задних управляемых колес и управляется датчиком угла поворота рулевого колеса. Это позволяет повысить устойчивость движения и маневренность транспортного средства с передними и задними управляемыми колесами. 1 ил.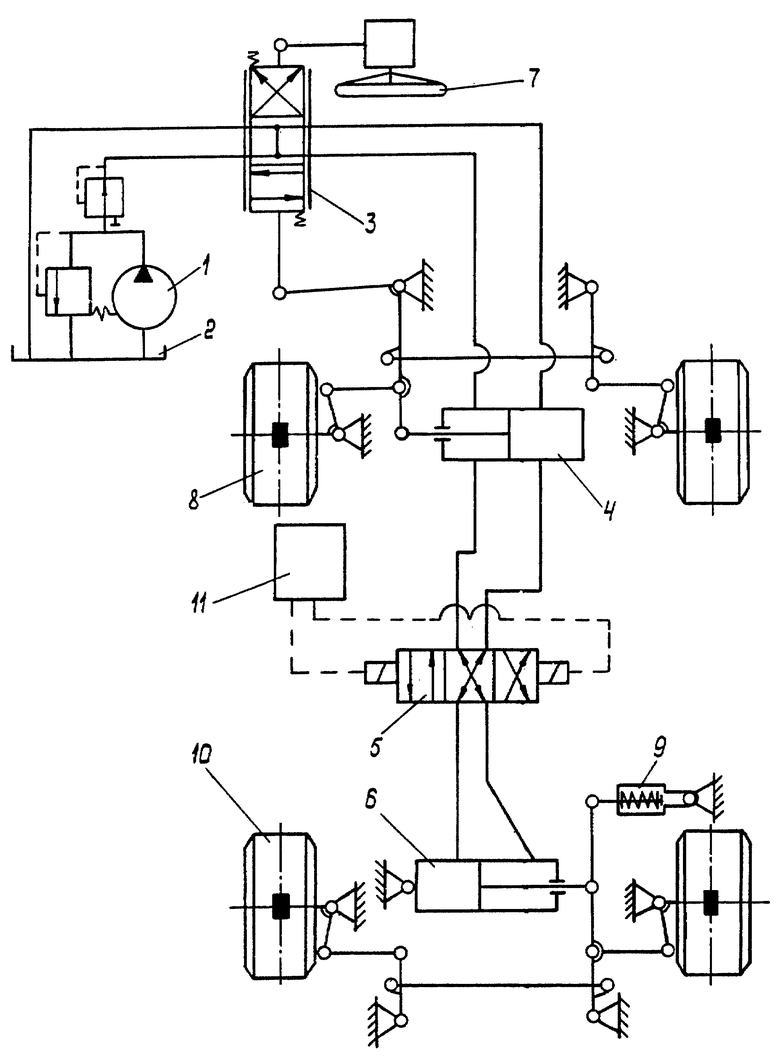
Рулевое управление колесного транспортного средства, содержащее основной четырехлинейный трехпозиционный распределитель рулевого управления, двумя линиями гидравлически соединенный с насосом и баком и посредством двух других гидролиний - с полостями исполнительного гидроцилиндра, кинематически связанного с передними управляемыми колесами с одной стороны и полостями исполнительного гидроцилиндра, кинематически связанного с задними управляемыми колесами и со стабилизатором нейтрального положения задних управляемых колес с другой, отличающееся тем, что оно снабжено четырехлинейным трехпозиционным вспомогательным распределителем с открытой нейтралью, управляемым датчиком угла поворота рулевого колеса и стабилизатором нейтрального положения задних управляемых колес, вспомогательный распределитель первой гидролинией через основной распределитель соединен с насосом, второй - с баком, а третьей и четвертой - с штоковой и поршневой полостями исполнительного гидроцилиндра задних управляемых колес соответственно, при этом вторая гидролиния вспомогательного распределителя через открытую нейтраль соединена с его четвертой гидролинией, а первая - с третьей, а в двух других позициях вспомогательного распределителя полости исполнительного гидроцилиндра задних управляемых колес через основной распределитель соединены с насосом и баком для обеспечения возможности изменения направления поворота задних управляемых колес в противофазе с передними управляемыми колесами.
| Система рулевого управления транспортного средства с передними и задними управляемыми колесами | 1980 |
|
SU943063A1 |
| US 4781262 A, 01.11.1988 | |||
| US 4896737 A, 30.01.1990 | |||
| US 5195603 A, 21.11.1991. | |||
