(54) СИСТЕМА РУЛЕВОГО УПРАВЛЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА С ПЕРЕДНИМИ И ЗАДНИМИ УПРАВЛЯЕМЫМИ Изобретение относится к транспортному машиностроению, а более конкретно к системам управления транспортных средст Известна система рулевого управления транспортного средства с передними и зад ними управляемыми колесами, содержащая распределитель рулевого управления, гидравлически соединенный гидронасосом, гидробаком и посредством рабочей гидролинии - со штоковой полостью исполнительного гидроцилиндра, кинематически связанного с передними управляемыми колесами, поршневая полость которого соединена с поршневой полостью исполнительного гидрбцилиндра, кинематически связанного с задними управляемыми колесами tl Основным недостатком системы является неустойчивость движения транспорт ного средства на высоких скоростях. Это объясняется тем, что при повороте управляемых колес передние сразу начинают катиться в режиме с положительным уводом, а задние входят в режим с отрицаКОЛЕСАМИтельным уводом. Вследствие того, что силы, действующие на передние и задние колеса, имеют различное направление, создается поворачивающий момент. Дальнейшая тенденция автомобиля к движению в прежнем направлении приводит к тому, что положительный увод передних колес возрастает, а задние переходят из режима движения с отрицательным уводом в режим с положительным уводом. При этом, изменение направления увода сопровождается ударной нагрузкой, что часто приводит к заносу и опрокидыванию автомобилей. Еще одним недостатком такого привода является наличие системы тяг, соединяющих исполнительные цилиндры и ухудшающих компоновочные свойства машин. Цель изобретения - улучшение управляемости путем повьпиения устойчивости при высоких скоростях движения. . Указанная цель достигается гм, что система снабжена двутшозиционным гид-
равлическим клапаном, датчиком скорости, датчиками углов поворота управляемы колес, электрически соединенных между собой по мостовой схеме и индикатором рассогласования, включенным в диагональ моста, причем двухпозиционный гидравлический клапан установлен с воэможностыо соединения в одном из положений поршневых полостей обоих исполнительных гидроцилтадров, и рабочей гидролинии со штоковой полостью исполнительного гидроцилиндра, кинематически связанного с задними управляемыми колесами, а в другом положении - поршневой полости исполнительного гидроиилиндра, кинематически .связанного с передними управляемыми колесами с распределителем рулевого управления, при этом двухпо- зишюн){ый гидравлический клапан кинематически связан с датчиком скорости.
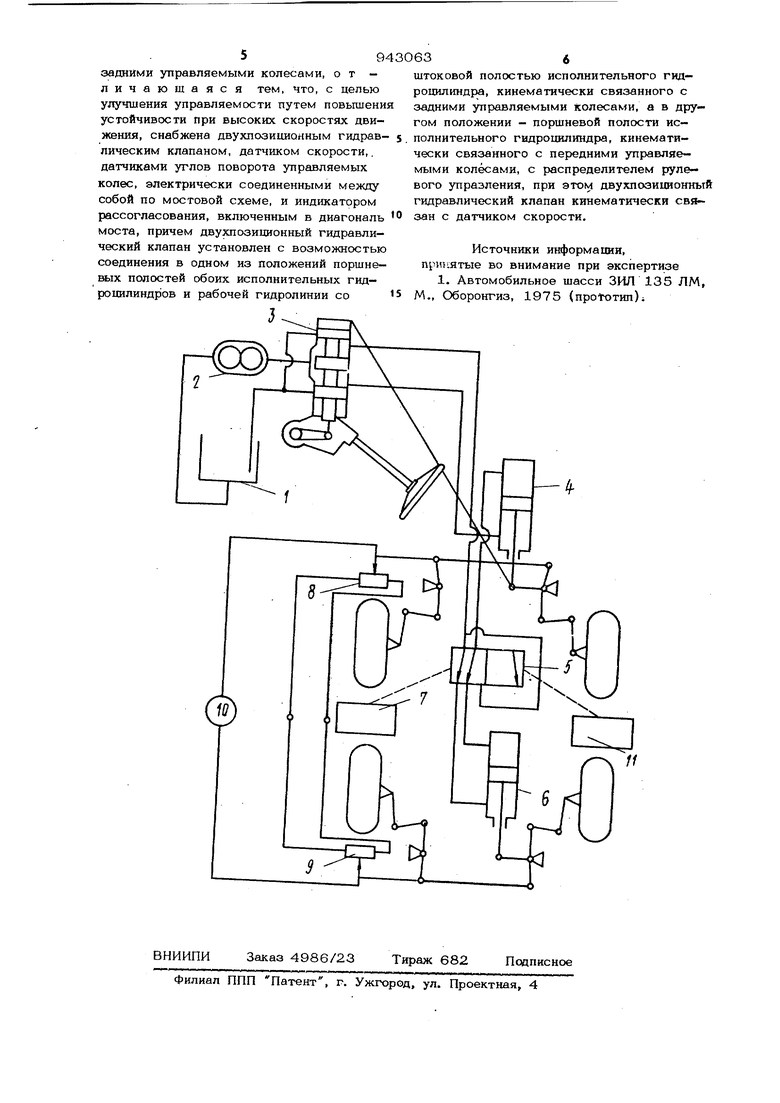
На чертеже изображена принципиальная схема системы управления.
Рабочая жидкость из гидробака 1 посредством гидронасоса 2 подается к распределителю рулевого управления 3, от которого рабочая жидкость поступает в штоковую полость исполнительного гидроцилиндра 4, кинематически связанного с передними управляемыми колесами, а его поршневая полость соединяется через двухпозиционный гидравлический клапан 5 с поршневой полостью исполнительного гид- рошшиндра 6, кинематически связанного с задними управляемыми колесами. Што- ковая полость цилйвдра 6 через клапан 5 соединяется с распределителем рулевого управления. Клапан 5. управляется от датчика 7 скорости и имеет два положения: первое - для движения на низких скорое- тях, обеспечивающее соединение поршневы полостей исполнительных гидроцилиндров и штоковую полость гидроцилиндра 6 с распределителем рулевого управления, вто рое - для движения на высоких скоростях обеспечивающее соединение поршневой полости гидроцилиндра 4 с распределителем рулевого управления. При помощи датчиков углов поворота управляемых колес 8 и 9, электрически соединенных между собой по мостовой схеме, и индикатора рассогласования 10, включенного в диагональ моста, определяется рассогласование углов поворота передних и задних управляемых колес. Для компенсации этой разности необходимо, при остановленной машине, с помощью ре- гулятора 11 перебросить клапан в положение, соответствующее движению на высоких скоростях, и с помощью рулевого
механизма довести сигнал рассогласования до нуля.
Работа системы рулевого управления.
При движении на низких скоростях, в случае поворота рулевого колеса, рабочая жидкость от распределителя рулевого управления поступает в штоковую полость исполнительного гидроцилиндра 4, а жидкость, вытесненная из его поршневой полости поступает в поршневую полость гидроцилиндра 6 и перемешает его шток. При увеличении- скорости движения мяши- ны вьшге критической датчиком скорости 7 вырабатывается сигнал, с помощью которого клапан 5 перебрасывается в другое положение. При этом, одна гидравлическая магистраль, подводяшая рабочую жидкость к гидроцилиндру 6, закрывается, а другая - соединяется с одним из выходов распределителя рулевого управления таким образом, что управление машиной осушестляется только при помоши поворота передних управляемых колес. При снижении скорости ниже критической, клапан 5 перебрасывается в исходное положение и поворот машины происходит за счет поворота колес обеих осей. Таким образом, при движении на низких скоростях, машина управляется при помощи передних и задних колес, что позволяет осуществить поворот с малым радиусом, а при движении на высоких скоростях управление осуществляется только за счет поворота колес одной оси, так как при такой скорости движения поворот осуществляется с большим радиусом. Система рулевого управления транспортного средства с передними и задними управляемыми колесами позволяет повысить устойчивость движения на высоких скоростях с сохранением маневренных качеств и улучшением компоновочных свойств. Формула изобретения Система рулевого управления транспортного средства с передними и задними управляемыми колесами, содержащая распределитель рулевого управления, гидравлически соединенный с гидронасосом, гвдробаком и посредством рабочей гидролинии - со штоковой полостью исполнительного гидроцилиндра, кинематически связанного с передними управляемыми колесами, поршневая полость которого соединена с . поршневой полостью исполнительного гид- рошшивдра, кинематически связанного с

| название | год | авторы | номер документа |
|---|---|---|---|
| Система управления колесами транспортного средства | 1990 |
|
SU1787858A1 |
| РУЛЕВОЕ УПРАВЛЕНИЕ КОЛЕСНОГО ТРАНСПОРТНОГО СРЕДСТВА | 1998 |
|
RU2157774C2 |
| РУЛЕВОЕ УПРАВЛЕНИЕ КОЛЕСНОГО ТРАНСПОРТНОГО СРЕДСТВА | 1998 |
|
RU2138418C1 |
| Гидропривод скрепера | 1975 |
|
SU781103A1 |
| ТЯГОВО-ТРАНСПОРТНОЕ СРЕДСТВО | 2002 |
|
RU2232685C1 |
| Гидравлическая система рулевого управления транспортного средства | 1981 |
|
SU977256A1 |
| Система управления четырехгусеничной машиной | 1989 |
|
SU1682230A1 |
| Гидравлическая система управления транспортного средства | 1982 |
|
SU1087400A1 |
| Система рулевого управления автопоезда | 1987 |
|
SU1474016A1 |
| Гидравлическая система рулевого управления шарнирно сочлененной машины | 1980 |
|
SU921927A1 |
