Изобретение относится к транспортному машиностроению, в частности к рулевым управлениям транспортных средств с гидроприводом.
Известно рулевое управление /А.С. СССР N 710854, МПК В 62 D 5/06, 1978/ транспортного средства со всеми управляемыми колесами, содержащее насос, бак, привод управления передними колесами, включающий рулевой механизм, кинематически связанный с рулевым колесом и гидравлически соединенный с насосом, баком и исполнительным гидроцилиндром передних управляемых колес, кинематически связанным с последними, и привод управления задними колесами, включающий гидравлический распределитель, соединенный с насосом, баком и исполнительным гидроцилиндром задних управляемых колес, кинематически связанный с последними. Кроме того, рулевой привод снабжен продольной рулевой тягой с двумя упорами, обеспечивающими запаздывание поворота задних управляемых колес относительно передних, необходимое для обеспечения устойчивости движения транспортного средства. В результате наличия свободного хода продольной тяги создается зона нечувствительности, в пределах которой на золотник гидравлического распределителя привода задних управляемых колес не будет подаваться управляющее воздействие. Положение задних колес в пределах этой зоны может стать неопределенным, зависящим от внешних условий. Для устранения этого недостатка система снабжена пружиной двустороннего действия и двумя двуплечими рычагами, удерживающими задние управляемые колеса в положении, соответствующем прямолинейному движению.
Недостатками данного рулевого управления являются низкая жесткость рулевого привода, обусловленная наличием свободного хода в продольной рулевой тяге, что неблагоприятно влияет на управляемость и устойчивость движения транспортного средства, наличие зоны нечувствительности включения гидравлического распределителя привода задних управляемых колес и повышенное сопротивление повороту задних колес, обусловленное наличием пружины двустороннего действия.
Наиболее близким по технической сущности является рулевое управление /Патент РФ N 2059498, МПК В 62 D 7/14, 1996/ транспортного средства с передними и задними управляемыми колесами, содержащее рулевое колесо, кинематически связанное через рулевой механизм с корпусом распределителя передних колес, золотник которого гидравлически связан с насосом и баком гидроусилителя, исполнительным гидроцилиндром передних колес и кинематически связан с штоком гидроцилиндра и рулевым приводом передних колес, с которым кинематически связан корпус распределителя задних колес, золотник которого гидравлически связан с насосом и баком гидроусилителя исполнительным гидроцилиндром задних колес и кинематически связан со штоком гидроцилиндра и рулевым приводом задних колес; редуктором, состоящим из корпуса, закрепленного на раме транспортного средства, ведущей и ведомой зубчатых реек, по крайней мере, одна из которых выполнена с переменных шагом, и соединенных с рулевыми приводами передних и задних управляемых колес соответственно и шестерней, установленной на оси в корпусе редуктора. Регулирование угловой скорости поворота задних управляемых колес осуществляется за счет переменного передаточного числа редуктора рулевого привода.
Недостатком данного рулевого управления является сложность конструкции редуктора рулевого привода, так как для нарезки зубьев реек с переменным шагом необходимо специальное оборудование. Кроме того, трудно обеспечить необходимую зависимость угла поворота задних управляемых колес от передних из-за конструкционных ограничений по степени изменения длины шага рейки.
Изобретение направлено на повышение жесткости рулевого привода задних управляемых колес, упрощение конструкции рулевого привода, обеспечивающего регулирование угловой скорости поворота задних управляемых колес.
Решение поставленной задачи достигается тем, что рулевое управление транспортного средства дополнительно снабжено мальтийским механизмом, состоящим из двух кривошипов с цевками и креста, установленных на осях, неподвижно связанных с рамой транспортного средства, причем кривошипы соединены с рулевым приводом передних колес, а крест - с рулевыми приводами задних колес.
Заявляемая система отличается наличием дополнительно введенного элемента: мальтийским механизмом, состоящим из двух кривошипов с цевками и креста, установленных на осях, неподвижно связанных с рамой транспортного средства, и его связи с остальными элементами рулевого управления. Дополнительно введенный механизм, установленный в рулевом приводе задних управляемых колес, позволяет обеспечить запаздывание их поворота по отношению к передним без снижения жесткости рулевого привода по сравнению с прототипом, имеющим свободный ход, обеспечиваемый конструкцией рулевой тяги. Кроме того, отсутствие конструктивного свободного хода устраняет зону нечувствительности включения гидравлического распределителя задних колес, что в свою очередь исключает необходимость применения стабилизирующей пружины двустороннего действия, которая увеличивает сопротивление повороту задних управляемых колес. Это позволяет уменьшить непроизводительные затраты мощности насоса гидроусилителя.
На чертеже представлена схема рулевого управления транспортного средства с передними и задними управляемыми колесами.
Рулевое управление транспортного средства с передними и задними управляемыми колесами содержит рулевое колесо 3, кинематически связанное через рулевой механизм 2 с корпусом распределителя 4, золотник которого кинематически связан с исполнительным гидроцилиндром 1 и рулевым приводом передних управляемых колес, с которым кинематически связаны кривошипы мальтийского механизма 9, который через крест кинематически связан с корпусом распределителя 7 задних управляемых колес, золотник которого кинематически связан с исполнительным гидроцилиндром 6 и рулевым приводом задних управляемых колес. Кроме того, рулевое управление содержит насос 5, обеспечивающий подачу рабочей жидкости из бака 11 в распределители 4 и 7, гидравлически связанные с цилиндрами 1, 6 соответственно и баком 11 через фильтр 10.
Рулевое управление работает следующим образом.
При отсутствии управляющих воздействий на рулевое колесо и прямолинейном движении транспортного средства золотники распределителей 4 и 7 находятся в нейтральном положении, сообщая напорные магистрали насоса 5 со сливом. Фиксация креста мальтийского механизма в неподвижном положении при отсутствии управляющих воздействий осуществляется запирающими дугами b и d.
При повороте рулевого колеса 3 управляющее воздействие передается через рулевой механизм 2 распределителю 4, смещая его корпус относительно золотника, открывая доступ рабочей жидкости, закачиваемой из бака 11 насосом 5 к рабочим полостям гидроцилиндра 1. Одна из полостей гидроцилиндра 1 сообщается с напорной магистралью насоса, другая со сливом, в результате чего перемещается шток гидроцилиндра 1, вызывая поворот передних управляемых колес, перемещение золотника распределителя 4 и кривошипов механизма 9. Цевка одного из кривошипов (в зависимости от направления поворота) входит в зацепление с крестом механизма 9, вызывая его поворот относительно своей оси, что ведет к смещению корпуса распределителя 7 относительно его золотника, открывая доступ рабочей жидкости, закачиваемой из бака 11 насосом 5 к рабочим полостям гидроцилиндра 6. Одна из полостей гидроцилиндра 6 сообщается с напорной магистралью насоса, другая - со сливом, в результате чего перемещается шток гидроцилиндра 6, вызывая поворот задних управляемых колес и перемещение золотника распределителя 7, обеспечивая таким образом обратную связь по перемещению.
Обеспечение плавного регулирования величины запаздывания поворота задних управляемых колес осуществляется за счет особенностей конструкции мальтийского механизма.
Изобретение относится к рулевым управлениям транспортных средств с гидроприводом. Рулевое управление транспортного средства с передними и задними управляемыми колесами содержит рулевое колесо, кинематически связанное через рулевой механизм с корпусом распределителя передних колес. Золотник распределителя передних колес гидравлически связан с насосом и баком гидроусилителя, исполнительным гидроцилиндром передних колес и кинематически связан со штоком гидроцилиндра и рулевым приводом передних колес. Корпус распределителя задних колес кинематически связан с рулевым приводом передних колес, а его золотник гидравлически связан с насосом и баком гидроусилителя, исполнительным гидроцилиндром задних колес, кинематически связан со штоком гидроцилиндра и рулевым приводом задних колес. Новым в рулевом управлении является установка мальтийского механизма, состоящего из двух кривошипов с цевками и креста, установленных на осях, неподвижно связанных с рамой транспортного средства, причем кривошипы соединены с рулевым приводом передних колес, а крест - с рулевыми приводами задних колес. Технический результат заключается в повышении жесткости рулевого привода задних управляемых колес, упрощении конструкции рулевого привода, обеспечивающего регулирование угловой скорости поворота задних управляемых колес. 1 ил.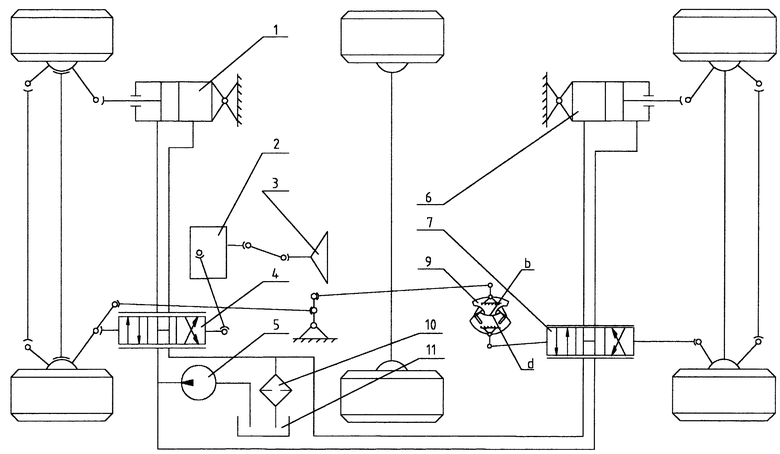
Рулевое управление транспортного средства с передними и задними управляемыми колесами, содержащее рулевое колесо, кинематически связанное через рулевой механизм с корпусом распределителя передних колес, золотник которого гидравлически связан с насосом и баком гидроусилителя, исполнительным гидроцилиндром передних колес и кинематически связан со штоком гидроцилиндра и рулевым приводом передних колес, с которым кинематически связан корпус распределителя задних колес, золотник которого гидравлически связан с насосом и баком гидроусилителя исполнительным гидроцилиндром задних колес и кинематически связан со штоком гидроцилиндра и рулевым приводом задних колес, отличающееся тем, что оно снабжено мальтийским механизмом, состоящим из двух кривошипов с цевками и креста, установленных на осях, неподвижно связанных с рамой транспортного средства, причем кривошипы соединены с рулевым приводом передних колес, а крест - с рулевыми приводами задних колес.
| Рулевое управление транспортного средства со всеми управляемыми колесами | 1978 |
|
SU710854A1 |
| Совмещенная двухслойная обмотка с отношением пар полюсов @ / @ (ее варианты) | 1984 |
|
SU1247989A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| DE 3820967 A1, 12.01.1989 | |||
| 0 |
|
SU189697A1 | |
