Изобретение относится к транспортному машиностроению, в частности к системам, обеспечивающим повышение поперечной устойчивости транспортных средств.
Известна система стабилизации поперечной устойчивости транспортного средства, содержащая сидовые цилиндры, установленные между рамой и осью колес, и последовательно соединенные гидролиниями с четырехлинейным трехпозиционным распределителем, имеющим привод от датчика угла поворота рулевого колеса, и через два четырехлинейных двухпозиционных распределителя, один из которых управляется датчиком скорости, а другой - датчиком загрузки, с насосом и баком [1].
Недостаток указанной системы состоит в том, что она выполняет свои функции (повышает поперечную устойчивость транспортного средства) только при строго определенных углах поворота рулевого колеса и скоростях движения. Однако критический по устойчивости режим движения может иметь место при различных углах поворота рулевого колеса и скорости движения. Например, при малых углах поворота рулевого колеса и больших скоростях движения, либо при значительных углах поворота рулевого колеса и относительно небольших скоростях движения.
Указанная система, кроме того, не обеспечивает повышение поперечной устойчивости транспортных средств, перевозящих текучие грузы. При повороте под действием центробежных сил изменяется положение центра масс перевозимого текучего груза относительно продольной оси транспортного средства. Это приводит к перераспределению нормальных реакций между внутренними и наружными, по отношению к центру поворота, колесами. Установка силовых цилиндров между рамой и осью колес не позволяет восстановить положение центра масс текучего груза относительно продольной оси транспортного средства и тем самым обеспечить устойчивость движения.
Изобретение направлено на расширение функциональных возможностей системы стабилизации поперечной устойчивости транспортного средства.
Решение поставленной задачи достигается тем, что система стабилизации поперечной устойчивости транспортного средства снабжена двусторонним пороговым датчиком боковых ускорений, связанным с линией управления четырехлинейного трехпозиционного распределителя. Двусторонний пороговый датчик боковых ускорений выполнен в виде подпружиненного с двух сторон инерционного контакта, имеющего возможность перемещения вдоль оси, расположенной параллельно поперечной оси транспортного средства, и двух неподвижных контактов, расположенных на этой оси на одинаковом расстоянии по обе стороны от подвижного контакта. Кроме того, силовые цилиндры установлены параллельно поперечной оси транспортного средства и соединены с одной стороны с его рамой, а с другой - с платформой, имеющей возможность бокового перемещения.
Заявляемая система стабилизации поперечной устойчивости транспортного средства отличается тем, что она снабжена двусторонним пороговым датчиком боковых ускорений, который связан с четырехлинейным трехпозиционным распределителем. Двусторонний пороговый датчик боковых ускорений выполнен в виде подпружиненного с двух сторон инерционного контакта, имеющего возможность перемещения вдоль оси, расположенной параллельно поперечной оси транспортного средства, и двух неподвижных контактов, установленных на этой оси на одинаковом расстоянии по обе стороны от подвижного контакта. Наличие четырехлинейного трехпозиционного распределителя, управляемого двусторонним пороговым датчиком боковых ускорений позволяет исключить из конструкции системы второй четырехлинейный двухпозиционный распределитель, управляемый датчиком скорости, и обеспечивает повышение поперечной устойчивости транспортного средства на различных скоростях движения при различных углах поворота рулевого колеса.
Установка силовых цилиндров параллельно поперечной оси транспортного средства и соединение их с одной стороны с рамой, а с другой - с платформой, имеющей возможность бокового перемещения, позволяет восстанавливать положение центра масс текучего груза относительно продольной оси транспортного средства и тем самым обеспечивает поперечную устойчивость движения. Таким образом, перечисленные отличительные признаки расширяют функциональные возможности системы стабилизации поперечной устойчивости транспортного средства.
На фиг. 1 представлена схема системы стабилизации поперечной устойчивости транспортного средства; на фиг. 2 - двусторонний пороговый датчик боковых ускорений (вариант) и его соединение с четырехлинейным трехпозиционным распределителем; на фиг. 3 - схема расположения силовых цилиндров на транспортном средстве; на фиг. 4 - то же, вид сверху.
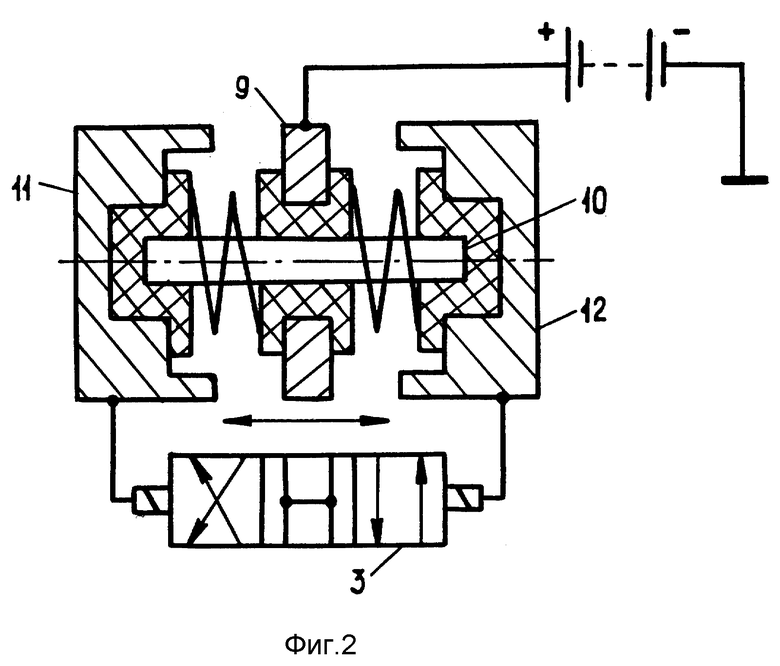
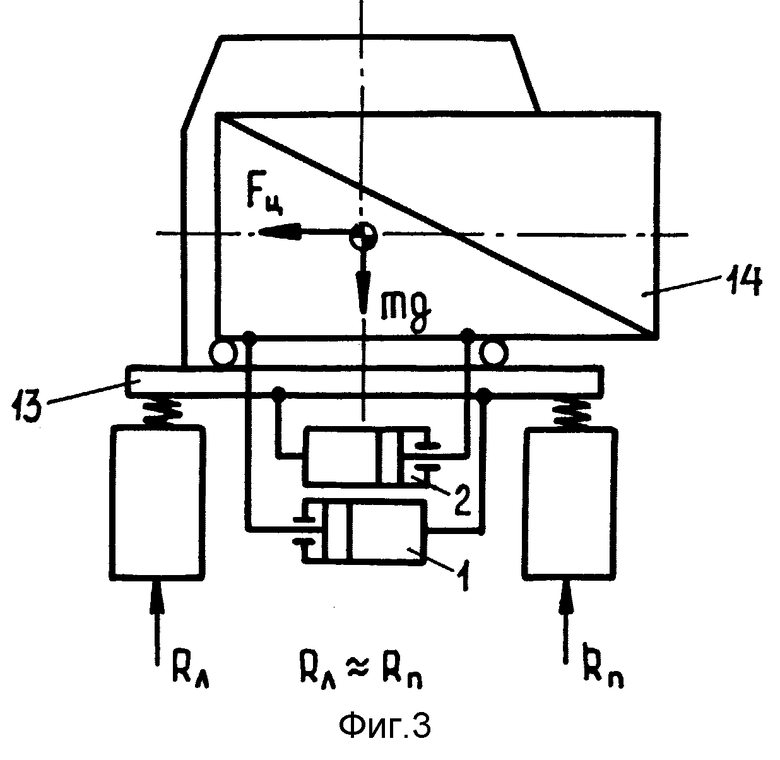
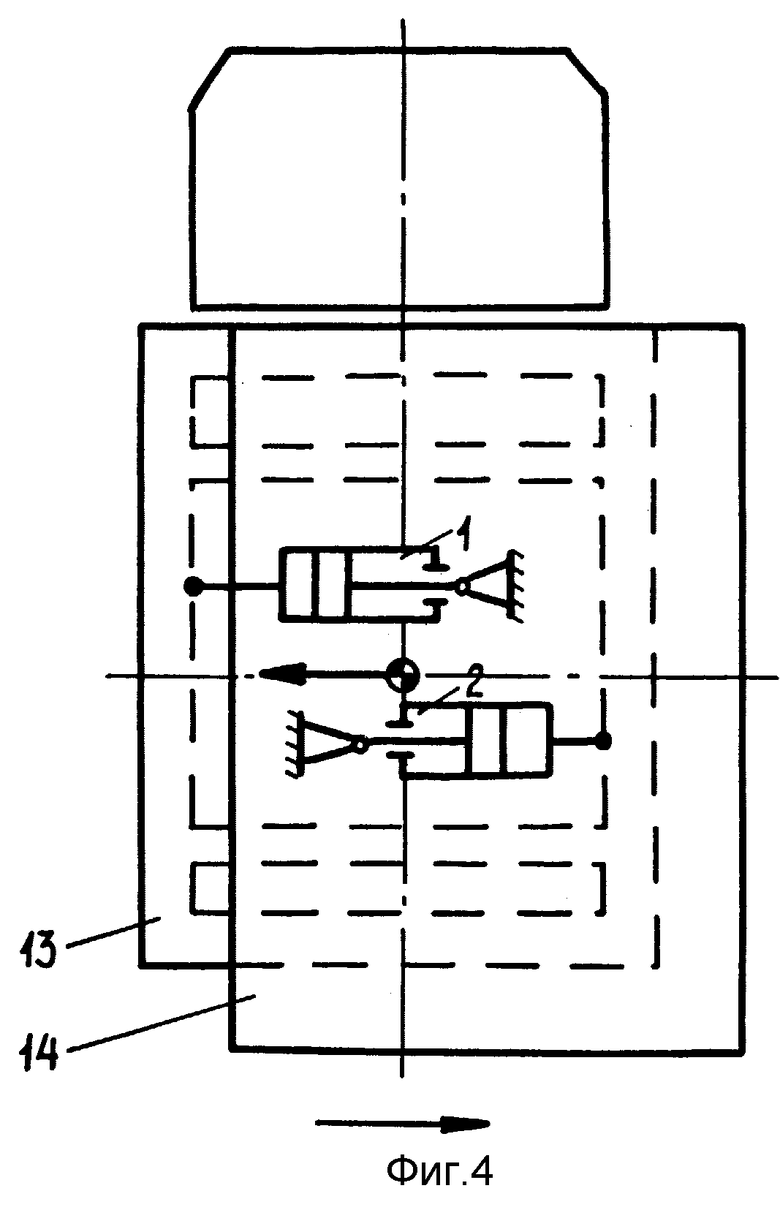
Система стабилизации поперечной устойчивости транспортного средства (фиг. 1) содержит силовые цилиндры 1 и 2, последовательно соединенные гидролиниями через четырехлинейный трехпозиционный распределитель 3, управляемый двусторонним пороговым датчиком боковых ускорений 4, и четырехлинейный двухпозиционный распределитель 5, управляемый датчиком загрузки 6, с насосом 7 и баком 8. При этом двусторонний пороговый датчик боковых ускорений 4 (фиг. 2) выполнен в виде подпружиненного с двух сторон инерционного контакта 9, имеющего возможность перемещения вдоль оси 10, расположенной параллельно поперечной оси транспортного средства, и двух неподвижных контактов 11 и 12, расположенных на этой оси на одинаковом расстоянии по обе стороны от подвижного контакта 9. Силовые цилиндры 1 и 2 установлены параллельно поперечной оси транспортного средства и соединены с одной стороны с его рамой 13 (фиг. 3, 4), а с другой - с платформой 14, имеющей возможность бокового перемещения.
При движении транспортного средства без груза рабочая жидкость поступает от насоса 7 через находящийся в исходном положении (фиг. 1) четырехлинейный двухпозиционный распределитель 5, управляемый датчиком загрузки 6, в бак 8. При этом поршни силовых цилиндров 1 и 2 находятся в среднем положении.
В случае движения груженого транспортного средства четырехлинейный двухпозиционный распределитель 5 под управлением датчика загрузки 6 перемещается влево (фиг. 1). Если при этом совершается прямолинейное движение, то подвижный контакт 9 двустороннего порогового датчика боковых ускорений 4 находится в среднем положении. В результате цепь питания электромагнитов управления четырехлинейного трехпозиционного распределителя 3 разомкнута и он находится в нейтральном положении. Рабочая жидкость поступает от насоса 7 через четырехлинейный двухпозиционный распределитель 5 и четырехлинейный трехпозиционный распределитель 3 в бак 8.
При повороте транспортного средства под действием центробежных сил подвижный контакт 9 двустороннего порогового датчика боковых ускорений 4, преодолевая сопротивление пружин, перемещается вдоль оси 10 в ту или иную сторону (в зависимости от направления поворота) до соприкосновения с неподвижным контактом 11 или 12, замыкая тем самым цепь питания электромагнитов управления четырехлинейного трехпозиционного распределителя 3. В результате этого четырехлинейный трехпозиционный распределитель 3 перемещается в одно из крайних положений, соединяя насос 7 и бак 8 с силовыми цилиндрами 1 и 2 таким образом, что происходит перемещение платформы 14 относительно рамы 13. Такое перемещение позволяет восстановить положение центра масс груза относительно продольной оси транспортного средства и тем самым повышает его поперечную устойчивость.
Источники информации:
1. 1344673, A, 15.10.87.
Изобретение относится к транспортному машиностроению, в частности к системам, обеспечивающим повышение поперечной устойчивости транспортных средств. Система стабилизации поперечной устойчивости транспортного средства содержит силовые цилиндры, последовательно соединенные гидролиниями через четырехлинейный трехпозиционный распределитель, управляемый двусторонним пороговым датчиком боковых ускорений, и четырехлинейный двухпозиционный распределитель, управляемый датчиком загрузки, с насосом и баком. При этом двусторонний пороговый датчик боковых ускорений выполнен в виде подпружиненного с двух сторон инерционного контакта, имеющего возможность перемещения вдоль оси, расположенной параллельно поперечной оси транспортного средства, и двух неподвижных контактов, расположенных на этой оси на одинаковом расстоянии по обе стороны от подвижного контакта. Силовые цилиндры установлены параллельно поперечной оси транспортного средства и соединены с одной стороны с его рамой, а с другой - платформой, имеющей возможность бокового перемещения. При повороте груженого транспортного средства четырехлинейные двухпозиционный и трехпозиционный распределители, управляемые соответственно датчиком загрузки и двусторонним пороговым датчиком боковых ускорений, соединяют силовые цилиндры с насосом и баком таким образом, что происходит перемещение платформы транспортного средства относительно его рамы, приводящее к повышению поперечной устойчивости. Технический эффект - расширение функциональных возможностей системы стабилизации поперечной устойчивости транспортного средства. 4 ил.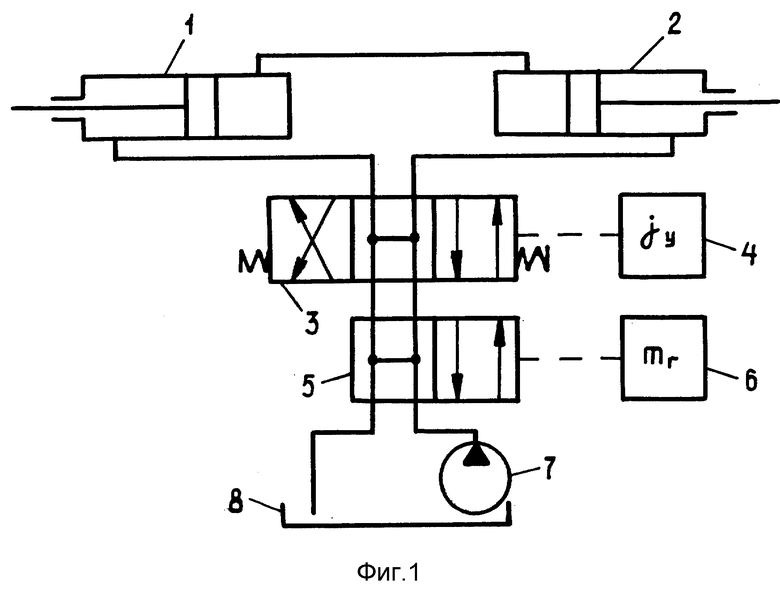
Система стабилизации поперечной устойчивости транспортного средства, содержащая силовые цилиндры, последовательно соединенные гидролиниями через четырехлинейный трехпозиционный распределитель и четырехлинейный двухпозиционный распределитель, управляемый датчиком загрузки, с насосом и баком, отличающаяся тем, что она снабжена двусторонним пороговым датчиком боковых ускорений, выполненным в виде подпружиненного с двух сторон инерционного контакта, имеющего возможность перемещения вдоль оси, расположенной параллельно поперечной оси транспортного средства, и двух неподвижных контактов, расположенных на этой оси на одинаковом расстоянии по обе стороны от подвижного контакта, и связанным с четырехлинейным трехпозиционным распределителем, при этом силовые цилиндры установлены параллельно поперечной оси транспортного средства и соединены с одной стороны с его рамой, а с другой - с платформой, имеющей возможность бокового перемещения.
| Устройство стабилизации транспортного средства при повороте | 1984 |
|
SU1344673A1 |
| Устройство стабилизации положения кузова транспортного средства | 1988 |
|
SU1533880A1 |
| Система гидравлического управления подвеской автомобиля | 1984 |
|
SU1278253A1 |
| US 4660853, 28.04.87 | |||
| US 4546997, 15.10.85 | |||
| Торфодобывающая машина с вращающимся измельчающим орудием | 1922 |
|
SU87A1 |
