Привод управления
Изобретение относится к транспортному машиностроению, а именно к приводам управления муфтами, тормозами.
Наиболее близким техническим решением, выбранным в качестве прототипа, является привод управления сцеплением, заявка PCT/GB 83/00225, МПК F 16 D 13/75, публикация 29.03.84 г., состоящий из гибкого дистанционного троса, протяженно расположенного внутри направляющей оболочки, и механизма компенсации износа рабочей части управляемого элемента. Механизм компенсации состоит из первого элемента, расположенного около одного конца оболочки, через который осевая нагрузка на оболочку может быть передана на неподвижный корпус (например, кузов автомобиля), и включающего зажимной элемент для закрепления оболочки от осевого перемещения относительно первого элемента. Зажимной элемент имеет возможность перемещаться из положения со свободной оболочкой в положение зажима оболочки, и имеет хотя бы один зуб, входящий в зацепление с выступами, расположенными вдоль конечной части оболочки так, что они позволяют осуществлять последовательную регулировку положения гибкого дистанционного троса относительно оболочки. В зажимном элементе выполнено устройство, создающее пропадающее зацепление между зажимным элементом и гибким дистанционным тросом. Первый элемент и зажимной элемент имеют скользящий контакт и объединены для создания поступательного движения зажимного элемента посредством клинового зажима оболочки при перемещении зажимного элемента гибким дистанционным тросом.
Недостатком данной конструкции является то, что компенсация износа рабочей части управляемого элемента в приводе управления осуществляется за счет перемещения и изменения эффективной, определяющей трассу, длины оболочки, следовательно оболочка должна иметь определенный запас по длине на величину этой компенсации, а поскольку оболочка является направляющей для скользящего перемещения гибкого дистанционного троса внутри нее, то излишняя длина оболочки, как правило, приводит к ухудшению трассы и, как следствие, к снижению долговечности гибкого дистанционного троса.
Задача изобретения: увеличение долговечности гибкого дистанционного троса привода управления.
Указанная задача решается тем, что в приводе управления, включающем гибкий дистанционный трос, протяженно расположенный внутри направляющей оболочки, управляющий элемент и механизм компенсации износа рабочей части управляемого элемента, состоящий из первого элемента, зажимного элемента, имеющего наклонную относительно продольной оси механизма компенсации износа рабочей части управляемого элемента поверхность, сопряженную с поверхностью первого элемента с возможностью скользящего перемещения относительно нее для создания неподвижного друг относительно друга зацепления по меньшей мере одного зуба зажимного элемента с выступами, равномерно и последовательно расположенными на зубчатом элементе, согласно изобретению оболочка выполнена с неизменяемой длиной и жестко закрепленными концами, первый элемент механизма компенсации износа рабочей части управляемого элемента одним концом соединен с управляющим элементом с возможностью перемещения совместно с зубчатым элементом, соединенным с гибким дистанционным тросом, и совместно с зажимным элементом, подпружиненным относительно первого элемента с постоянным контактом по их сопряженным поверхностям, а вторым концом сопряжен с упором, охватывающим зубчатый элемент и подпружинивающий его элемент относительно упора, зажимной же элемент имеет поверхность, контактирующую с сопряженной поверхностью упора, причем по меньшей мере одна из контактируемых сопряженных поверхностей зажимного элемента и упора выполнена наклонной относительно продольной оси механизма компенсации износа рабочей части управляемого элемента, с возможностью скользящего перемещения зажимного элемента относительно упора. В частном случае исполнения зажимной элемент подпружинен относительно первого элемента конической пружиной, а подпружинивающий элемент зубчатого элемента выполнен в виде цилиндрической пружины.
Упор выполнен с возможностью передавать усилие цилиндрической пружины на оппозитно расположенные зажимные элементы посредством детали, имеющей возможность захватывать упор для совместного перемещения его с зажимными элементами.
В частном случае исполнения второй конец первого элемента разомкнут, охватывается элементом, состоящим по меньшей мере из одной детали, ограничивающей его деформацию.
Сравнение предлагаемого технического решения с уровнем техники по научно-технической и патентной документации на дату приоритета в основной и смежной рубриках показывает, что совокупность существенных признаков заявляемого решения ранее не была известна, следовательно, оно соответствует условию патентоспособности "новизна".
Анализ известных технических решений в данной области техники показал, что предложенное устройство имеет признаки, которые отсутствуют в известных технических решениях, а использование их в совокупности признаков дает возможность получить новый технический эффект, следовательно, предложенное техническое решение имеет изобретательский уровень по сравнению с существующим уровнем техники.
Предложенное техническое решение промышленно применимо, так как может быть изготовлено промышленным, работоспособно, осуществимо и воспроизводимо, следовательно, соответствует условию патентоспособности "промышленная применимость".
Сущность изобретения поясняется на чертежах:
на фиг. 1 - привод управления, вид сбоку;
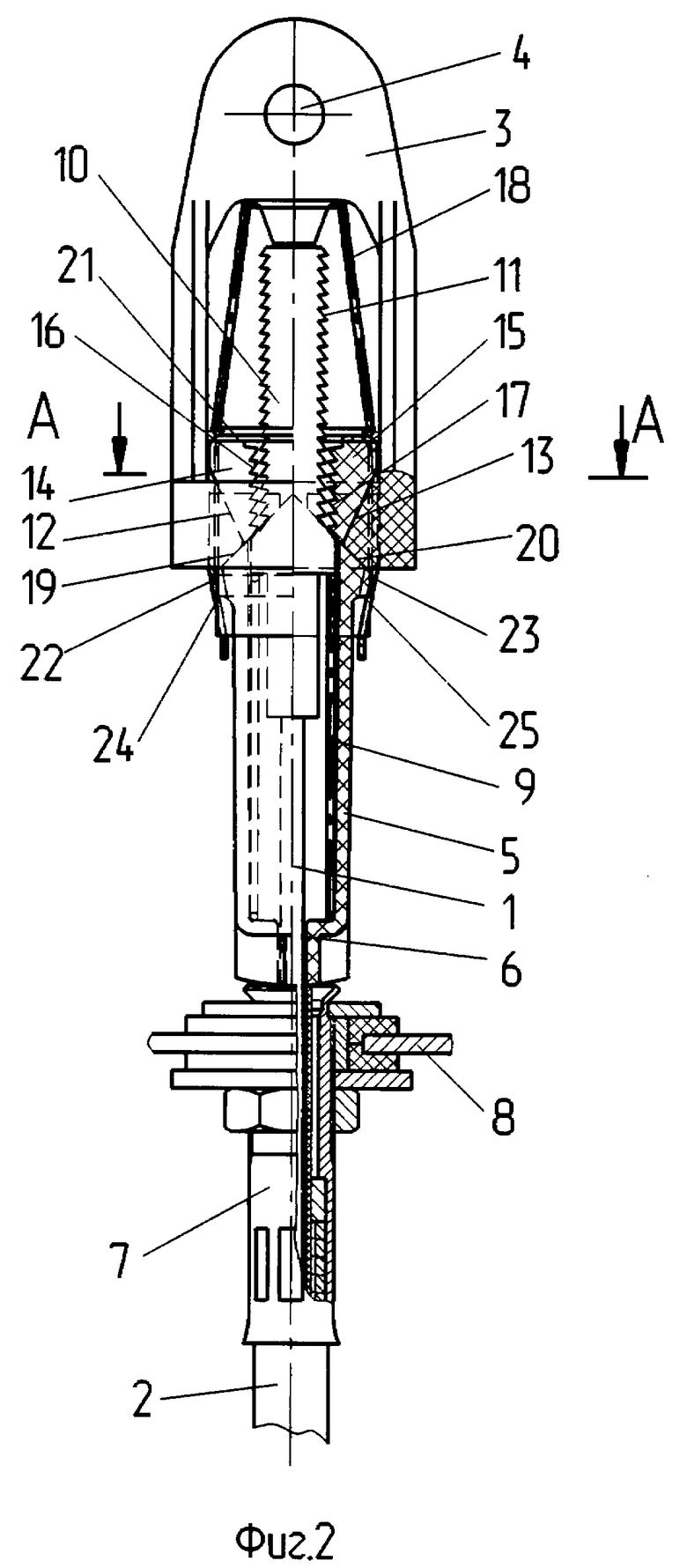
на фиг. 2 - привод управления, вид спереди;
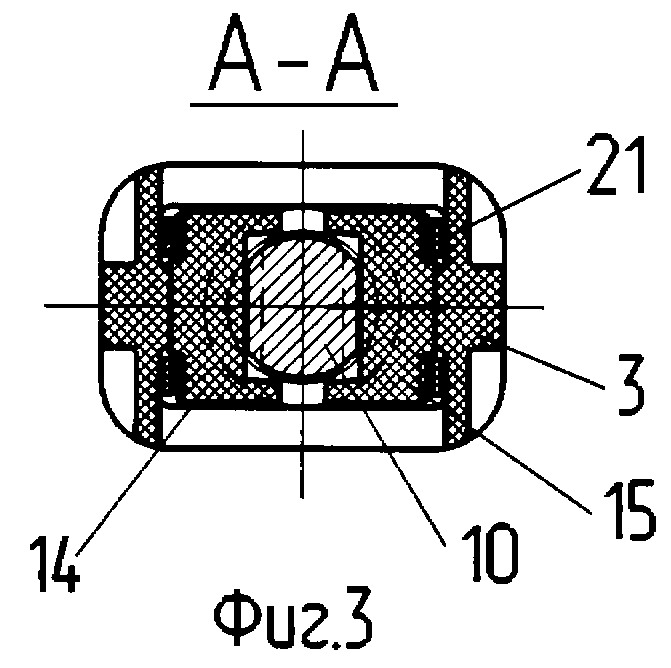
на фиг. 3 - сечение А-А на фиг. 2;
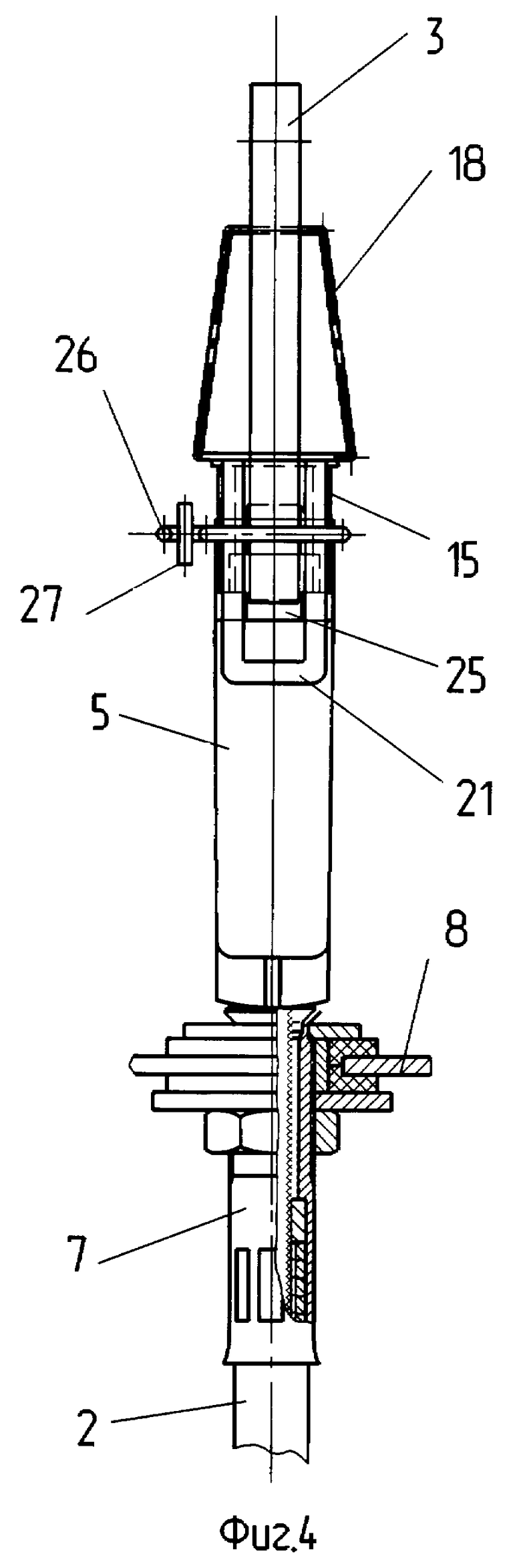
на фиг. 4 - привод управления, вид сбоку (второй пример исполнения);
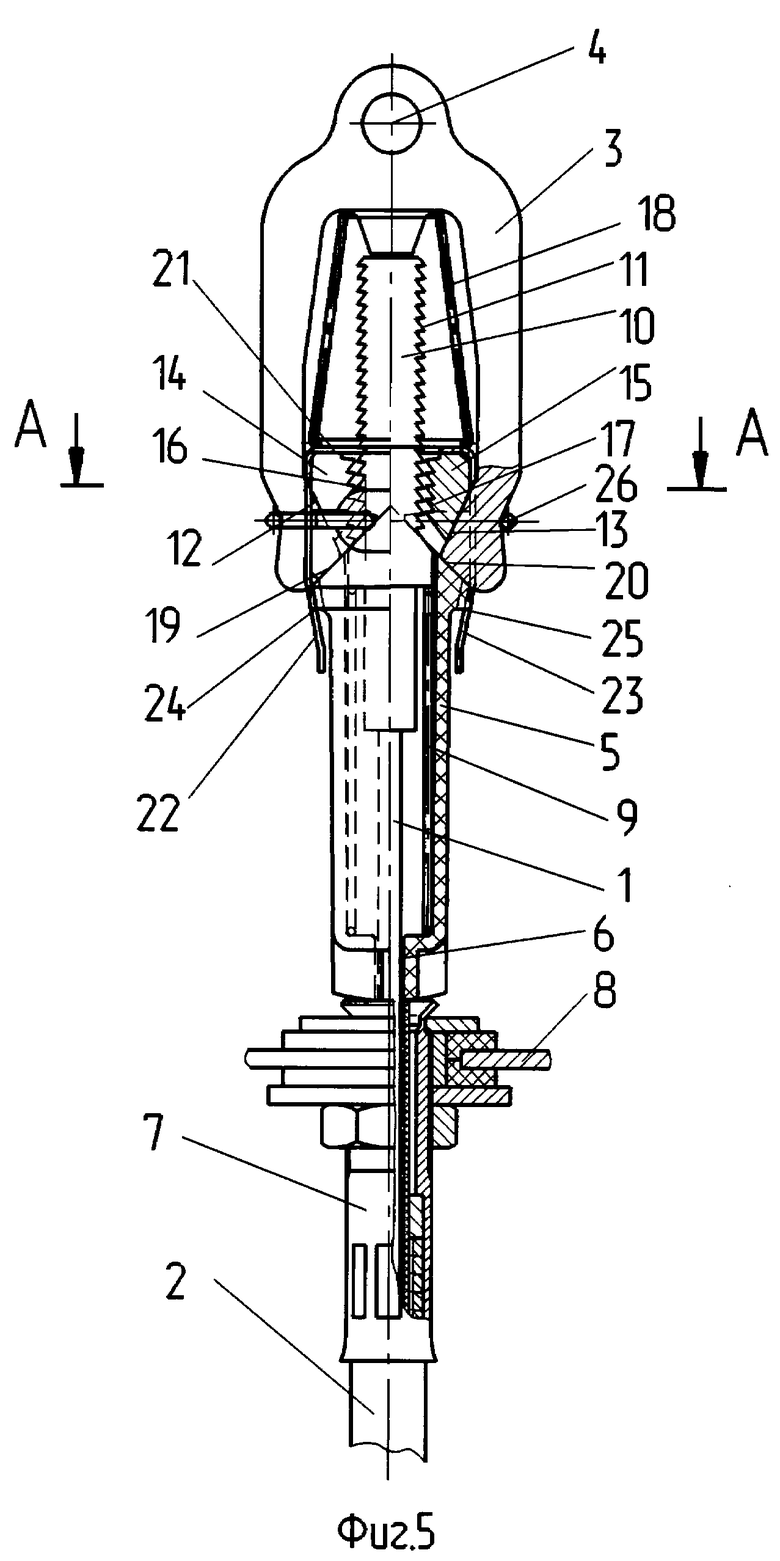
на фиг. 5 - привод управления, вид спереди (второй пример исполнения);
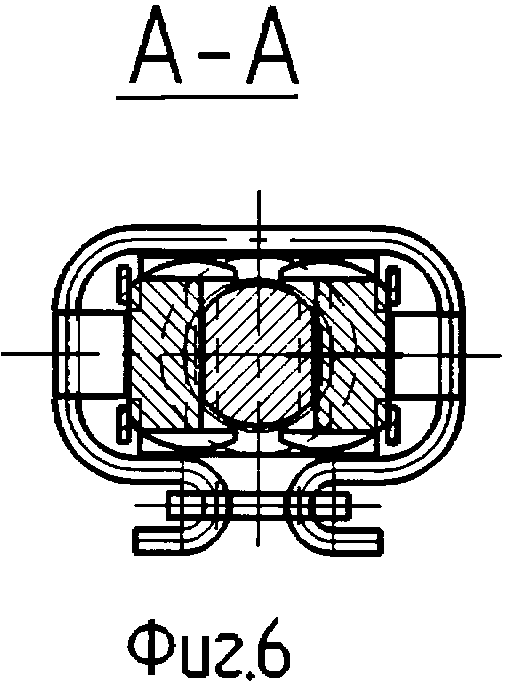
на фиг. 6 - сечение А-А на фиг. 5 (второй пример исполнения).
Привод управления содержит гибкий дистанционный трос 1, протяженно расположенный внутри направляющей оболочки 2, имеющей неизменяемую длину и закрепленные неподвижно оба конца, и механизм компенсации износа рабочей части управляемого элемента, в частном случае исполнения накладок сцепления, состоящий из первого элемента 3, шарнирно соединенного одним концом через отверстие 4, выполненное в нем, с управляющим элементом - педалью (на чертежах не показано), а вторым концом опирающегося, под действием пружины, воздействующей на педаль (пружина на чертежах не показана), на упор 5, который своей нижней частью с отверстием 6, через которое проходит трос 1, в свою очередь, опирается на наконечник 7 оболочки 2, неподвижно закрепленный на корпусе 8 (в частном случае исполнения - щитке передка кузова). Второй наконечник оболочки троса так же, как и наконечник 7 неподвижно закреплен (в частном случае исполнения на картере сцепления - на фиг. не показано). Упор 5 механизма компенсации износа рабочей части управляемого элемента охватывает цилиндрическую пружину 9, предназначенную для выбора зазоров в приводе, посредством создания определенного поджимного усилия, в частном случае исполнения на подшипнике сцепления. Цилиндрическая пружина 9 упирается одним концом в дно упора 5, а вторым - в зубчатый элемент 10, который соединен с тросом 1. Зубчатый элемент 10 имеет последовательно расположенные вдоль продольной оси выступы 11 и может перемещаться для компенсации износа, в частном случае накладок диска сцепления. Первый элемент 3 механизма износа имеет две наклонные относительно продольной оси механизма компенсации износа рабочей части управляемого элемента поверхности 12 и 13, с которыми постоянно сопрягаются, с возможностью скользящего перемещения, поверхности двух оппозитно расположенных зажимных элементов 14 и 15, имеющих зубья 16 и 17 соответственно. Первый элемент 3 контактирует вторым концом с упором 5 посредством наклонно выполненных на нем относительно продольной оси механизма компенсации износа рабочей части управляемого элемента поверхностей с сопряженными поверхностями 19 и 20 упора 5. Зажимные элементы 14 и 15 под действием конической пружины 18, установленной между ними и первым элементом 3, контактируют с теми же (вышеописанными) наклонными поверхностями 19 и 20 упора 5 с возможностью скользящего перемещения вдоль них для вывода зубьев 16 и 17 из зацепления с выступами 11 зубчатого элемента 10, позволяя последнему, сжимая цилиндрическую пружину 9, перемещаться для компенсации износа рабочей части управляемого элемента (накладок сцепления).
Описанный привод управления может быть применен как для управления сцеплением на транспортном средстве, так и, например, для управления тормозами на транспортном средстве, а также может быть применен и в других областях техники, где требуется компенсировать износ рабочих частей управляемых механизмов.
При рабочем ходе, в частном примере выключения сцепления - педаль, перемещаясь, увлекает за собой первый элемент 3, который, в свою очередь, тянет за собой зажимные элементы 14 и 15, скользящие под действием конической пружины 18 по наклонным поверхностям 12 и 13 первого элемента 3, которые вступают в зацепление своими зубьями 16 и 17 с выступами 11 зубчатого элемента 10.
Углы наклона поверхностей 12 и 13 первого элемента 3 и сопрягаемых поверхностей зажимных элементов 14 и 15, а также углы наклона опорных поверхностей их зубьев 16, 17 и выступов 11 зубчатого элемента 10 подобраны таким образом, что зажимные элементы 14 и 15, преодолевая трение, входят в зубчатое зацепление на всю высоту зуба. Таким образом, первый элемент 3 вместе с зажимными элементами 14 и 15 и зубчатым элементом 10, перемещаясь за управляющим органом - педалью, передают усилие через гибкий дистанционный трос 1 на воздействующий элемент управляемого элемента, в частном примере - вилку выключения сцепления.
Так как в заявляемом техническом решении, в отличие от прототипа, оболочка выполнена с неизменяемой длиной, т.е. концы оболочки жестко закреплены, и так как в заявляемом техническом решении отсутствует необходимость тормозящего устройства для гибкого дистанционного троса в механизме компенсации износа (такого как, у прототипа - зажимное изогнутое продольное отверстие), - то нет необходимости закладывать в конструкцию привода управления излишнюю длину оболочки троса, приводящую к ухудшению трассы для гибкого дистанционного троса, а следовательно все это увеличивает долговечность гибкого дистанционного троса привода управления.
Коническая пружина 18 воздействует на зажимные элементы 14 и 15 через П-образную деталь 21, которая на своих боковых поверхностях 22 и 23 имеет замкнутые по периметру отверстия, охватывающие выступы 24 и 25 на упоре 5. При перемещении с педалью деталь 21 увлекает за выступы 24 и 25 упор 5, через который под действием цилиндрической пружины 9 создается дополнительное усилие на зажимные элементы 14 и 15 для полного зубчатого зацепления.
На фиг. 1, 2, 3 показан, в частном случае исполнения, привод управления с механизмом компенсации износа, в частном примере, накладок диска сцепления, у которого первый элемент 3, упор 5 и зажимные элементы 14 и 15 выполнены из пластмассы.
На фиг. 4, 5 и 6 показан в частном случае исполнения привод управления с механизмом компенсации износа, в частном примере, накладок диска сцепления, у которого первый элемент 3 и зажимные элементы 14 и 15 выполнены из стали, причем у первого элемента 3 один конец разомкнут, а для исключения его деформации от усилия зубчатого элемента 10, передаваемого через зажимные элементы 14 и 15 на разомкнутый конец первого элемента 3, последний охватывается без зазора дополнительной деталью 26, в конкретном случае исполнения выполненной из стальной проволоки, у которой концы замкнуты замком 27.
| название | год | авторы | номер документа |
|---|---|---|---|
| Механизм автоматической регулировки привода управления фрикционного устройства | 1989 |
|
SU1707341A1 |
| Зажимное устройство и станок, оборудованный таким устройством | 2020 |
|
RU2759352C1 |
| Устройство управления манипуляторами роботохирургического комплекса | 2020 |
|
RU2757969C1 |
| ГРУЗОЗАХВАТНОЕ УСТРОЙСТВО | 2012 |
|
RU2524741C2 |
| КРАНО-МАНИПУЛЯТОРНАЯ УСТАНОВКА | 2003 |
|
RU2264347C2 |
| АГРЕГАТ ДЛЯ УКЛАДКИ ОПТОВОЛОКОННОГО КАБЕЛЯ НА ПРОВОД ВОЗДУШНОЙ ЛИНИИ ЭЛЕКТРОПЕРЕДАЧ | 1996 |
|
RU2124256C1 |
| ПРИВОД УПРАВЛЕНИЯ СЦЕПЛЕНИЕМ | 2007 |
|
RU2347695C1 |
| СКАНИРУЮЩИЙ ЗОНДОВЫЙ МИКРОСКОП С УСТРОЙСТВОМ ДЛЯ ФУНКЦИОНИРОВАНИЯ МНОГОЗОНДОВОГО ДАТЧИКА | 2013 |
|
RU2538412C1 |
| ПРИВОД СТОЯНОЧНОГО ТОРМОЗА | 2000 |
|
RU2191711C2 |
| ОПОРНО-ПОВОРОТНОЕ УСТРОЙСТВО КРАНОМАНИПУЛЯТОРНОЙ УСТАНОВКИ | 2001 |
|
RU2230699C2 |
Изобретение относится к транспортному машиностроению, а именно к приводам управления муфтами, тормозами. Привод включает дистанционный трос, расположенный внутри направляющей оболочки, дистанционный элемент и механизм компенсации износа рабочей части управляющего элемента. Оболочка выполнена с неизменяемой длиной, то есть концы троса закреплены жестко. Отсутствует необходимость тормозящего устройства для троса в механизме компенсации износа. В результате увеличивается долговечность троса привода управления. 4 з.п. ф-лы, 6 ил.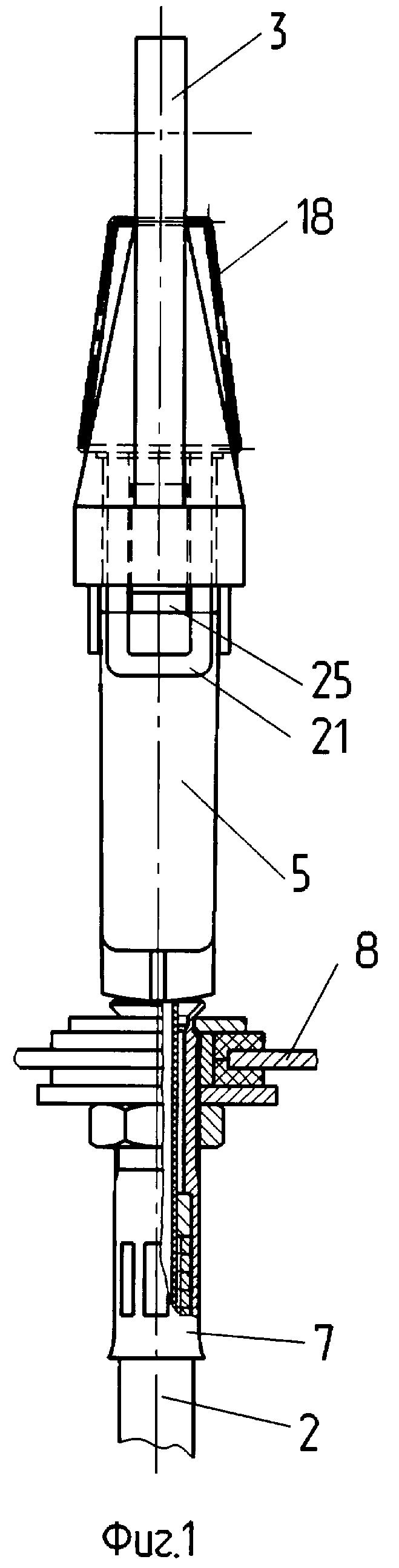
| Способ приготовления сернистого красителя защитного цвета | 1921 |
|
SU84A1 |
| Пюпитр для работы на пишущих машинах | 1922 |
|
SU86A1 |
| Механизм автоматической регулировки привода управления фрикционного устройства | 1989 |
|
SU1707341A1 |

