Изобретение относится к радиолокации и может быть использовано при решении задач радионавигации для повышения эффективности Государственных программ обеспечения безопасности полетов в России согласно рекомендациям ИКАО [Федеральная целевая программа «Обеспечение безопасности полетов воздушных судов государственной авиации Российской Федерации в 2011-2015 годах» (Распоряжение Правительства РФ от 22 апреля 2009 г., №554 - р.), 35 с.; Федеральная целевая программа «Модернизация единой системы организации воздушного движения Российской Федерации (2009-2015 годы)» Утверждена Постановлением Правительства Российской Федерации от 1 сентября 2008 г., №652, «Собрание законодательства РФ» №37 от 15 сентября 2008 г., Раздел 4, п.4209, М.: Юридическая литература, Администрация Президента РФ, 2008 г., 45 с.].
Основная решаемая задача - повышение эффективности систем управления безопасностью полетов.
В авиации известен и внедряется способ автоматического зависимого наблюдения (вещательного) (АЗН - В) (пилотные проекты Москва - АЗН, Балтика-АЗН-В, Ямал- АЗН-В, Юг-АЗН) [Журнал «Авиапанорама», №4, раздел «Наука-технологии», стр.16-17, М.: 2008].
АЗН-В является способом наблюдения, при котором воздушные суда (ВС) автоматически, по линии передачи данных (ЛПД), передают в центр управления воздушным движением информацию о местоположении и параметрах полета, полученную от бортовых пилотажно-навигационных систем. В качестве основного инструмента определения навигационных параметров воздушного судна (скорость, высота, курс, координаты ВС) используются спутниковые системы глобального позиционирования (GPS) ГЛОНАСС и НАВСТАР. В центрах управления воздушным движением (УВД) передаваемые с борта ВС данные обрабатываются и отображаются на рабочем месте диспетчера так же, как и радиолокационная информация. Перекрывающиеся поля двух систем наблюдения (радиолокационной и АЗН) дают диспетчеру единое поле наблюдения, которое может быть распространено на нижнее воздушное пространство и области с различными дефектами радиолокационного поля.
Для передачи сообщений в различных системах, реализующих способ АЗН-В, могут быть использованы радиолокационные самолетные ответчики, работающие в режиме S с произвольным протоколом радиовещания [4], УКВ линии цифровой связи VDL (VHP-Data Line) в режиме 4, использующем самоорганизующийся протокол с разделением во времени, и приемопередатчики универсального доступа [DOC 9871 AN/464, Технические положения, касающиеся услуг режима «S» и расширенного сквиттера, Монреаль, ИКАО, 2009, 245 с.]. Системы наблюдения АЗН-В будут использоваться в качестве дополнения вторичных обзорных радиолокаторов (ОРЛ) для заполнения разрывов в радиолокационном поле, а также, возможно, в качестве средства замены вторичных радиолокаторов в условиях низкой и средней плотности воздушного движения.
Базовый принцип АЗН-В «каждый видит каждого» обеспечивает наблюдение за воздушной обстановкой как в центре управления, так и на борту каждого воздушного судна на всех этапах полета. То есть, все воздушные суда в данной конкретной зоне полетов имеют информацию о местоположении друг друга, что в значительной мере снижает риск столкновения между ВС.
Таким образом, реализация способа АЗН-В обеспечивает:
- автономную спутниковую навигацию на всех режимах полета;
- не радиолокационное наблюдение на фоне карты местоположения объектов (воздушных и наземных), оборудованных комплексом АЗН-В в пределах УКВ связи;
- пилотирование ВС с применением дифференциальной спутниковой навигации на всех этапах полета (от взлета до посадки) в условиях отсутствия видимости и ночью;
- непрерывный контроль параметров полета ВС наземными центрами управления воздушным движением (в пределах УКВ связи);
- предупреждения столкновений с ВС и другими объектами, оборудованными комплексами АЗН-В.
Преимуществами способа АЗН-В и очевидными выгодами от его внедрения являются также снижение (примерно в 10 раз) стоимости процесса и аппаратуры контроля навигационной обстановки по сравнению с системами УВД на базе обзорных радиолокационных станций (РЛС) и повышение пропускной способности воздушного пространства и эффективности УВД.
Наряду с отмеченными преимуществами способа АЗН-В, которые послужили причиной интеграции с системами, реализующими этот способ, предлагаемой в настоящей Заявке АЗН присущи следующие недостатки:
необходимость развития соответствующей наземной инфраструктуры;
- усложнение операций УВД в тех районах, где обслуживаются ВС, оснащенные и неоснащенные оборудованием АЗН;
- усложнение операций УВД на стыках районов с введенными и не введенными системами АЗН;
- необходимость введения новых процедур организации воздушного движения (ОВД);
- невозможность осуществления на всех участках полета непрерывного контроля и оценки процессов, характеризующих работоспособность основных систем воздушных судов, влияющих на безопасность полетов, режимы полета, действия и состояние экипажа, а также принятия (в случае необходимости) оперативных решений по его спасанию и определению координат места аварии или катастрофы.
Известен также способ регистрации информации самолетными системами объективного контроля (СОК), принятый за прототип [Бортовой аварийный регистратор параметров полета «БАРС-2М» (РВИЖ.467542.032).niivk.ru>index.php?id=33Москва].
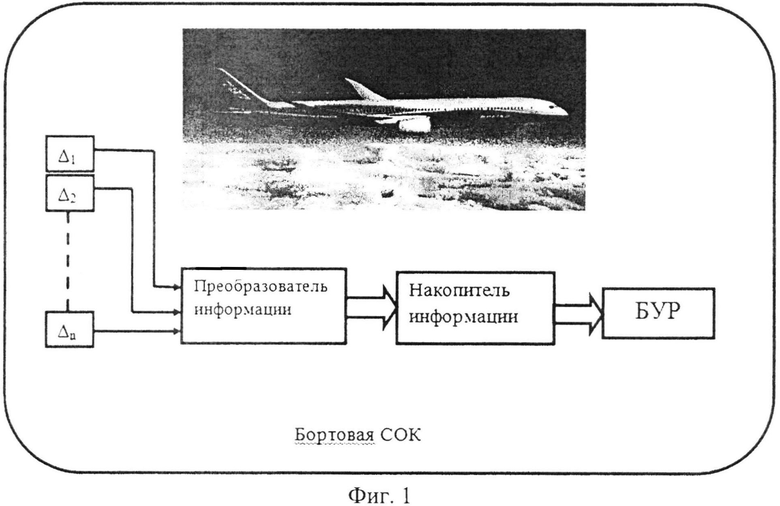
Бортовые самописцы (бортовые устройства регистрации - БУР) являются основной частью СОК, которая регистрирует сведения о состоянии авиационной техники (давление топлива на входе в двигатель, давление гидросистем, обороты двигателя, температуру за турбиной и т.д), навигационные данные (скорость полета, высота, курс, прохождение приводных маяков), действия экипажа (отклонения органов управления, уборка/выпуск взлетно-посадочной механизации) и др. (Фиг.1).
Недостатком этого способа является его низкая оперативность - СОК регистрируют необходимые параметры, но не позволяют осуществить их анализ на борту воздушных судов (ВС) в полете.
Применяемые в настоящее время БУР классифицируются по функциональному назначению (аварийные, эксплуатационные и испытательные), по принципу и форме записи информации.
Для обеспечения записи параметров полета в БУР СОК воздушных судов устанавливаются датчики, выдающие соответствующие сигналы через согласующее устройство в накопитель информации, который осуществляет непрерывную запись измеряемых величин и запись разовых команд.
Объективному контролю при этом подлежат:
- общая продолжительность полета (его этапов);
- режимы полетов и маневра;
- работа AT и действия экипажей по ее эксплуатации в воздухе;
- переговоры между членами экипажа;
- радиообмен с диспетчерскими пунктами (ДП) и другими пунктами управления;
- постановка задач на полеты и предполетные указания.
Указанные датчики используются для объединения с ними системы, реализующей предлагаемый способ непрерывного контроля целостности воздушных судов на всех этапах полета.
Считывание информации СОК после каждого полета является обязанностью наземного персонала. Эта информация считывается, обрабатывается и анализируется. Результаты обработки информации БУР отдельных типов ВС используются затем в статистических системах обработки информации о данном типе ВС. Эти системы позволяют выполнить общий анализ инцидентов, аварий и катастроф, определить пути и способы совершенствования авиационной техники (AT), технической эксплуатации, подготовки летного и технического состава.
Особенность БУР ВС состоит в том, что процессы измерения контролируемых параметров и оценки результатов контроля разнесены во времени. Это определяет как ценность полученной информации (она тем выше, чем выше оперативность ее обработки), так и ее недостатки, вызванные невозможностью в настоящее время осуществить ее анализ на борту ВС в полете и принять (в случае необходимости) оперативные решения по его спасанию и определению координат места аварии или катастрофы. Проблемным в ряде случаев является поиск аварийного бортового регистратора после катастрофы ВС. В результате число инцидентов с неустановленными причинами в авиации России составляет в настоящее время примерно 20-22% от общего их количества. Эти обстоятельства приводят к необходимости создания системы, реализующей способ непрерывного контроля целостности воздушных судов, способный радикально изменить обстановку в российской безопасности полетов ВС, которая требует незамедлительного повышения уровня безопасности полетов и внедрения новых методов управления.
В основу этих методов (согласно рекомендациям ИКАО) должны быть положены принципы управления факторами риска для безопасности полетов и гарантия безопасности полетов, принятие управленческих решений в условиях возможно полной и достоверной информации о состоянии элементов авиационной системы (АС) и особенностях их взаимодействия в процессе организации, подготовки и выполнения полетов с принятием упреждающих мер, а не устранением последствий авиапроисшествий. При этом информация о летной годности ВС в процессе эксплуатации как важнейшей составляющей АС имеет определяющее значение.
Таким образом, существенным недостатком данного способа является то, что при применении существующей СОК ВС осуществить анализ и оценку результатов контроля на борту ВС в полете и принять (в случае необходимости) оперативные решения по его спасанию и определению координат места аварии или катастрофы невозможно.
Предлагаемый способ направлен на устранение указанных недостатков прототипа решением задачи повышения оперативности и качества оценки уровня работоспособности ВС системой объективного контроля на борту ВС за счет осуществления непрерывного контроля и оценки процессов, характеризующих режимы полета, действия и состояние экипажа, функционирование бортового оборудования с формированием затем признака наличия или отсутствия целостности ВС и передачей его экипажу и в центры управления и спасания.
Предлагается способ непрерывного контроля целостности воздушных судов (ВС), заключающийся в том, что на всех участках полета осуществляют непрерывный контроль и оценку процессов, характеризующих работоспособность основных систем воздушных судов, влияющих на безопасность полетов, режимы полета, действия и состояние экипажа, затем с помощью бортового процессора системы формируют признаки наличия или отсутствия целостности ВС и передают их экипажу, центрам управления и спасания, при этом объединяют с указанным процессором бортовые средства объективного контроля, бортовую и наземную аппаратуру моноимпульсных вторичных радиолокаторов, работающих в дискретно-адресном режиме и модернизированных до режима «S», бортовую и наземную аппаратуру радиовещательного автоматического зависимого наблюдения (АЗН-В), в которой также используют режим «S» (точнее, расширенный сквиттер) в качестве одного из возможных каналов передачи информации о наличии или отсутствии признака целостности ВС, аппаратуру международной системы спасания терпящих бедствие КОСПАС-САРСАТ, устанавливаемую на навигационных искусственных спутниках Земли Глонасс-К1 и его модификациях, бортовую пилотажно-навигационную систему и спутниковые системы глобального позиционирования GPS и ГЛОНАСС для определения местоположения и параметров полета ВС, обеспечивают наблюдение за воздушной обстановкой как в центре управления, так и на борту каждого воздушного судна на всех этапах полета в реальном масштабе времени, отличающийся тем, что при непрерывном контроле целостности ВС и получении признака его отсутствия, принимают меры для принятия упреждающих, коррективных действий, необходимых для поддержания согласованного уровня безопасности полетов на всех участках полета от взлета до посадки, а также оперативного определения местоположения воздушного судна в случае аварийной посадки без использования аварийных бортовых регистраторов.
Предлагаемый способ реализуется системой (Фиг. 3), объединяющей бортовые средства, осуществляющие на всех участках полета непрерывную регистрацию с выхода датчиков через согласующее устройство в накопитель информации сигналов, содержащих сведения о состоянии авиационной техники (давление топлива на входе в двигатель, давление гидросистем, обороты двигателя, температуру за турбиной и т.д), навигационных данных (местоположение воздушного судна (ВС), скорость полета, высота, курс, прохождение приводных маяков), действиях экипажа (отклонения органов управления, уборка/выпуск взлетно-посадочной механизации и др.), прохождении разовых команд, затем с помощью бортового системного процессора (БСП) с указанным накопителем информации сигналов, портами для аналого-цифрового и цифроаналогового преобразования информации при ее вводе и выводе, таймером и соответствующим программным обеспечением проводится контроль, фиксация и анализ упреждающих допусков определяющих диагностических параметров подсистем ВС, влияющих на безопасность полетов, контроль и фиксация действий экипажа по управлению ВС на различных этапах его полета (при оценке действий экипажа в системе используются предельно допустимое значение контролируемого параметра и упреждающий допуск), контроль и фиксация прохождения разовых команд с выдачей соответствующих квитанций, фиксация и обработка информации бортовых навигационных и пилотажных систем ВС (БПНК, радио и изобарический высотомер, ДИСС, АРК, многоканальный совмещенный приемоиндикатор для определения местоположения ВС по сигналам СРНС Глонасс и Навстар и др.) для контроля местоположения ВС с формированием и выдачей затем признаков наличия или отсутствия целостности ВС, под которой понимается способность формирования с помощью предлагаемой системы на борту ВС в автономном режиме признака, обеспечивающего своевременные предупреждения в случаях, когда ВС нельзя использовать по назначению, бортовую и наземную аппарату моноимпульсных вторичных радиолокаторов, работающих в дискретно-адресном режиме и модернизированных до режима «S» [В.В. Бейнарович. Моноимпульсный метод во вторичной радиолокации ГА РФ. М.: МГТУ ГА, 2008, 32 с., ГОСТ 21800-89. Системы вторичной радиолокации для управления воздушным движением. Общие технические требования, ГОСТ 25620-83 Системы вторичной радиолокации для управления воздушным движением. Методы измерений основных параметров], бортовую и наземную аппаратуру радиовещательного автоматического зависимого наблюдения (АЗН-В) [Журнал «Авиапанорама», №4, раздел «Наука-технологии», стр.16-17, М., 2008, DOC 9871 ΑΝ/464, Технические положения, касающиеся услуг режима «S» и расширенного сквиттера, Монреаль, ИКАО, 2009, 245 с.], аппаратуру международной системы спасания терпящих бедствие Коспас-Сарсат, устанавливаемую на навигационных искусственных спутниках Земли Глонасс-К1 и его модификациях, при этом АЗН-В также использует режим «S» (точнее, расширенный сквиттер [DOC 9871 AN/464, Технические положения, касающиеся услуг режима «S» и расширенного сквиттера, Монреаль, ИКАО, 2009, 245 с.] в качестве одного из возможных каналов передачи информации. Этот режим позволяет осуществлять запрос всех оборудованных соответствующей аппаратурой ВС, а также адресный запрос и двусторонний обмен цифровой информацией между ВС и запросчиком, то есть выполнять функции избирательной адресации в линии передачи данных.
При описании алгоритмов контроля целостности ВС, а также структуры и принципов функционирования системы, реализующей предлагаемый способ, используют следующие понятия и термины теории эксплуатации AT [Наставление по технической эксплуатации и ремонту авиационной техники в гражданской авиации. (НТЭРАТ ГА-93), М., Департамент воздушного транспорта МТ России, 1995, 62 с.].
Целостность ВС по аналогии со спутниковыми радионавигационными системами - способность формирования с помощью предлагаемой системы контроля на борту ЛА в автономном режиме признака, обеспечивающего своевременные предупреждения в случаях, когда ВС нельзя использовать по назначению.
При определении предельного состояния работоспособности ВС в процессе эксплуатации выбирают стратегию эксплуатации (использования) до предотказового состояния. Если для изделия принята стратегия эксплуатации до предотказового состояния, то необходимым и обязательным условием ее осуществления на практике является принятие стратегии диагностирования и обслуживания данного изделия по состоянию с контролем параметров.
Диагностический признак (параметр) - признак (параметр) объекта диагностирования, используемый в установленном порядке для определения технического состояния объекта. Применение стратегии по состоянию с контролем параметров предусматривает в ЭД установление предотказового значения параметра, определяющего техническое состояние изделия.
Предотказовым значением параметра называют значение диагностического параметра, находящегося в поле (зоне) упреждающего допуска, который характеризует диапазон изменения данного параметра, в котором в соответствии с эксплуатационной или ремонтной документацией нарушается исправность изделия при сохранении его работоспособности.
Предельно допустимое значение - наибольшее или наименьшее значение параметра, которое может иметь работоспособное изделие.
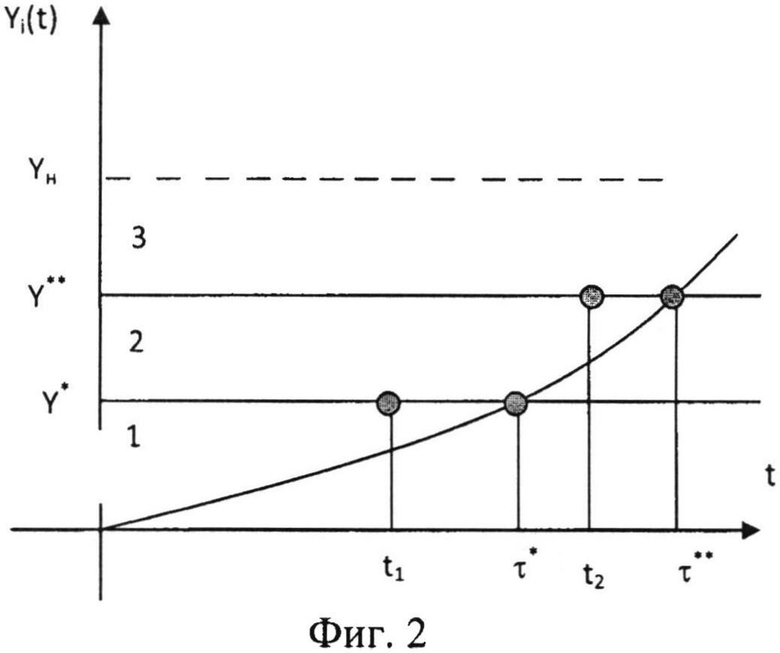
Изменение технического состояния оборудования при реализации алгоритма стратегии эксплуатации (использования) до предотказового состояния, принятого при реализации предлагаемого способа, характеризуется параметрами Yi(t), значения которых и определяют это состояние (Фиг. 2).
На фиг. 2 Υн, Υ*, Υ** - номинальное, наименьшее предотказовое и предельно допустимое значения параметра, установленные в нормативно-технические данные (НТД);
- t1 и t2 - моменты контроля;
- τ* и τ** - моменты перехода в другое состояние;
- область 1 - исправное состояние;
- область 2 - предотказное (неисправное, но работоспособное) состояние, когда требуется проведение операций по восстановлению исправности оборудования после посадки ВС;
- область 3 - неработоспособное состояние.
Упреждающий допуск ΔΥ=Υ**-Υ* и периодичность контроля Δt=t2-t1 должны быть такими, чтобы значение параметра после достижения уровня Y* при наработке Δt=t2-t1 до момента t2 не достигло значения Y** с вероятностью не меньше заданной. Упреждающий допуск параметра устанавливается для предупреждения перехода объекта в неработоспособное состояние.
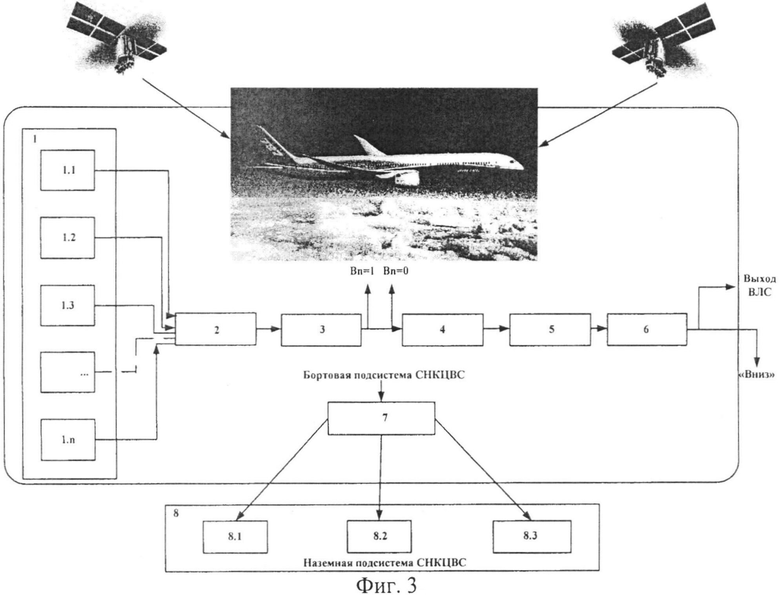
Предлагаемый способ реализуется на основе системы контроля целостности ВС, которая состоит из бортовой и наземной подсистем (Фиг. 3).
В бортовой подсистеме, при нахождении определяющих диагностических параметров всех основных подсистем ВС в поле упреждающих допусков, при отсутствии нарушений экипажем ВС правил проведения полетов (ППП) и своевременном прохождении разовых команд, БПС (блок 3) формирует признак целостности ВС Bn=0. Этот признак с дискретностью, определяемой типом ВС и участками полета, выводится экипажу и в Бортовой Процессор линии передачи данных воздушного судна (БПЛПД) (блок 4) - специальный процессор ВС для конкретной линии передачи данных ′′воздух - земля′′ (например, в режиме «S» или АЗН-В), который обеспечивает организацию каналов, а также делит на сегменты и/или вновь компонует сообщение для передачи. На одном конце он соединен с БПС, а на другом - с самой линией передачи данных ′′воздух - земля′′. После БПЛПД сообщения поступают в Общий форматтер/администратор (ОФА) (блок 5), осуществляющий GFM - функцию на борту ВС, форматирует сообщения, подлежащие включению в регистры приемоответчиков (РПО) (блок 6), несет ответственность за выявление и обработку ошибок, таких как потеря входных данных.
Автономный контроль целостности ВС бортовой подсистемой дополняется внешним контролем и ретрансляцией наземной подсистемой сигналов БПС с помощью наземной и космической аппаратуры контроля целостности ВС и управления, входящей в состав Единой системы организации воздушного движения (ЕСорВД) и Службы спасания РФ.
Наземная подсистема осуществляет операции сбора, внешнего контроля, управления, анализа и ретрансляции сигналов БПС с помощью Наземного процессора линии передачи данных (НПЛПД) (блок 7). НПЛПД - наземный специальный процессор для конкретной линии передачи данных ′′воздух - земля′′ (например, в режиме «S» (блок 8.1) или АЗН-В (блок 8.2)), который обеспечивает организацию каналов, а также делит на сегменты и/или вновь компонует сообщения для передачи. На одном конце он соединен с помощью оборудования окончания канала данных (DCE) с наземными элементами, общими для всех систем линий передачи данных, а на другом - с самой линией передачи данных "воздух - земля". Передача данных с наземной станции на борт ВС осуществляется по линии связи ′′вверх′′. При этом сигналы ′′земля - воздух′′ в режиме «S» передаются по каналу связи на частоте запроса 1030 МГц.
При выходе определяющих диагностических параметров подсистем ВС из поля упреждающих допусков, нарушении экипажем ВС правил проведения полетов (ППП) и не прохождении разовых команд БПС формирует признак отсутствия целостности ВС Bn=1. При этом максимальная задержка от момента обнаружения неисправности, нарушения ППП и факта не прохождения разовых команд до передачи их признака Bn=1 не должна превышать требований ИКАО к дискретности выдачи информации 0,125 с.
Признак Bn=1 с дополнительной световой и звуковой сигнализацией в непрерывном режиме выводится экипажу для принятия экстренных мер по спасанию ВС и транслируется по перечисленным выше каналам передачи признака Bn=0, а также с помощью НКА Глонасс-К и их модификаций СРНС Глонасс и системы Коспас-Сарсат (блок 8.3) - в центры управления и координационно-спасательные центры.
Указанные процедуры дополняются контролем целостности ВС, проводимым наземной подсистемой.
Внедрение описанных алгоритмов работы бортовой и наземной подсистем приведет к снижению нагрузки на диспетчера и экипаж в процессе управления воздушным движением и полетом.
При реализации предлагаемой системы разработчиками AT состав, длина, дискретность и условия передачи признаков целостности ВС Bn=0 и Bn=1 с привязкой к бортовой шкале времени должны определяться типами ВС (составом определяющих диагностических параметров) и участками полета. Естественно, кадры с признаком Bn=1 должны обладать максимально возможной информативностью о работе подсистем ВС с обязательным включением в их состав координат терпящего бедствие ВС для оперативного определения его местоположения в случае аварийной посадки и установления причин инцидентов. Рассматриваемые ситуации должны быть распределены в группы по высоте приоритета для передачи информации, что приведет к повышению уровня ситуационной осведомленности летчика и диспетчера.
Покажем возможность создания системы, реализующей предложенный способ. Указанная реализация с учетом дефицита времени, средств и состава парка ВС в гражданской и государственной авиации РФ должна осуществляться поэтапно.
На первом этапе, для этой цели целесообразно использовать аварийные бортовые устройства регистрации (БУР) эксплуатируемых и вводимых ВС, в которых информация одновременно с записью в бортовой регистратор будет параллельно поступать на вход БПС предлагаемой системы и далее обрабатываться с целью получения и трансляции признаков целостности ВС по описанным выше алгоритмам. При принятии на этом этапе в качестве основного канала передачи признаков целостности ВС наземным потребителям протоколов всенаправленной передачи в режиме «S» (включая всенаправленную передачу по линии связи ′′вверх′′ и всенаправленную передачу по линии связи ′′вниз′′) бортовая и наземная аппаратура последней должна быть соответствующим образом доработана для синхронной работы с БПС при приеме, обработке и передаче команд и информации. На этом же этапе проводится монтаж и модернизация бортовой и наземной аппаратуры АЗН-В, вторично - первичных аэродромных и трассовых радиолокаторов до режима «S» и спутниковых радионавигационных и связных систем для передачи, приема и ретрансляции признаков целостности ВС в центры управления и координационно-спасательные центры. Необходимо при этом отметить, что указанные монтаж и модернизация одновременно обеспечивают реализацию функции наблюдения согласно рекомендациям ИКАО.
Этап должен завершаться разработкой контрольных карт и доработкой тренажеров по типам ВС, которые позволят экипажам сосредоточиться на стандартных рабочих процедурах по управлению полетом, выделить различия между руководством и управлением полетом, что приведет к существенному снижению влияния человеческого фактора на безопасность полетов.
На следующих этапах реализации системы непрерывного контроля целостности ВС с учетом результатов, полученных на 1 этапе, проводится оптимизация состава определяющих параметров с коррекцией (в случае необходимости) упреждающих допусков для них без ориентации на БУР ВС.
В результате разрабатывается и реализуется оптимальная структура предлагаемой системы как важнейшей составляющей системы управления безопасностью полетов в соответствии с требованиями ICAO и EUROCONTROL с последующим ее включением в перспективные интегрированные бортовые комплексы обеспечения безопасности полетов. При этом использование в качестве основного ядра оптимальной по структуре системы бортового процессора (БПС), форматов и протоколов режима «S» и расширенного сквиттера обеспечивают открытость ее архитектуры, что позволяет совершенствовать характеристики и расширять функциональные возможности последней без существенных доработок аппаратной части.
Основным средством концентрации и распределения информации для осуществления функций УВД в системе контроля целостности ВС предполагается использование существующих и перспективных комплексов средств автоматизации управления воздушным движением (КСА УВД). На базе КСА УВД будут осуществляться функции приема и обработки информации наблюдения от различных источников: АЗН-В, аэродромных и трассовых вторичных радиолокаторов, модернизированных до режима «S», спутниковых радионавигационных и связных систем, а также выдача этой информации внутренним и внешним потребителям.
К преимуществам предлагаемого способа следует отнести возможность обеспечения:
- непрерывного контроля и оценки в реальном масштабе времени процессов, характеризующих режимы полета, действия и состояние экипажа, функционирование бортового оборудования с формированием затем признаков наличия или отсутствия целостности ВС, передачей их экипажу и в центры управления и спасания для принятия упреждающих, коррективных действий, необходимых для поддержания согласованного уровня безопасности полетов на всех участках полета от взлета до посадки (например, контроль целостности ВС перед взлетом, принятие экстренных мер по посадке ВС и др.);
- постоянного мониторинга и регулярной оценки уровня безопасности полетов с определением рисков для безопасности полетов;
- оперативного определения местоположения воздушного судна в случае аварийной посадки без использования аварийных бортовых регистраторов;
- повышения качества исходной информации для поисково-спасательных служб;
- повышения оперативности и качества анализа причин инцидентов с ВС;
- внедрения и реализации методологии и программно-аппаратных средств регистрации полетной информации, анализа действий экипажа при послеполетном разборе полета с целью совершенствования техники пилотирования;
- повышения уровня ситуационной осведомленности летчика и диспетчера;
- снижения нагрузки на диспетчера и экипаж в процессе управления воздушным движением и полетом;
- существенное снижение влияния человеческого фактора на безопасность полетов.
Открытая архитектура предлагаемой системы позволяет совершенствовать характеристики и расширять ее функциональные возможности в соответствии с требованиями ICAO и EUROCONTROL по обеспечению безопасности полетов без существенных доработок аппаратной части системы и постоянно повышать общую эффективность системы управления безопасностью полетов.
Технический результат - повышение эффективности систем управления безопасностью полетов согласно требованиям ИКАО.
| название | год | авторы | номер документа |
|---|---|---|---|
| Комплекс бортового оборудования вертолетов и самолетов авиации общего назначения | 2016 |
|
RU2640076C2 |
| СПОСОБ КОНТРОЛЯ ЦЕЛОСТНОСТИ КООРДИНАТНОЙ ИНФОРМАЦИИ ГНСС В ЦЕЛЯХ УПРАВЛЕНИЯ ВОЗДУШНЫМ ДВИЖЕНИЕМ | 2013 |
|
RU2601617C2 |
| ЛЕТНО-МОДЕЛИРУЮЩИЙ ПИЛОТАЖНЫЙ КОМПЛЕКС | 2006 |
|
RU2310909C1 |
| Интегрированная автоматизированная система контроля и управления средствами поисково-спасательного обеспечения спускаемых космических аппаратов | 2017 |
|
RU2668145C1 |
| СПОСОБ АВТОМАТИЗИРОВАННОГО УПРАВЛЕНИЯ ЭКСПЛУАТАЦИЕЙ БЕСПИЛОТНОГО ВОЗДУШНОГО СУДНА В ОБЩЕМ ВОЗДУШНОМ ПРОСТРАНСТВЕ ДЛЯ ОБЕСПЕЧЕНИЯ БЕЗОПАСНОГО ПОЛЕТА С ВЫЯВЛЕНИЕМ СЛУЧАЕВ НЕСАНКЦИОНИРОВАННОГО ИЗМЕНЕНИЯ ТРАФИКА ПОЛЕТА | 2017 |
|
RU2662611C1 |
| СПОСОБ УПРАВЛЕНИЯ ПОЛЕТАМИ В ОБЩЕМ ВОЗДУШНОМ ПРОСТРАНСТВЕ БЕСПИЛОТНОГО ВОЗДУШНОГО СУДНА | 2018 |
|
RU2699613C1 |
| СПОСОБ И УСТРОЙСТВО КОНТРОЛЯ ДОСТОВЕРНОСТИ ДАННЫХ СИСТЕМЫ АВТОМАТИЧЕСКОГО ЗАВИСИМОГО НАБЛЮДЕНИЯ (ВАРИАНТЫ) | 2024 |
|
RU2830184C1 |
| КОМПЛЕКС БОРТОВЫХ СРЕДСТВ ЦИФРОВОЙ СВЯЗИ | 2006 |
|
RU2319304C2 |
| ИНТЕГРИРОВАННЫЙ КОМПЛЕКС БОРТОВОГО ОБОРУДОВАНИЯ РАЗНОРОДНОЙ АРХИТЕКТУРЫ | 2015 |
|
RU2592193C1 |
| АВТОМАТИЗИРОВАННАЯ СИСТЕМА ОБЕСПЕЧЕНИЯ БЕЗОПАСНОСТИ ПОЛЕТОВ ПИЛОТИРУЕМОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 2008 |
|
RU2370416C1 |
Изобретение относится к системам управления безопасностью полетов. Достигаемый технический результат - повышение эффективности систем управления безопасностью полетов. Способ основан на введении в бортовое оборудование воздушных судов системного процессора, который объединен с бортовой системой объективного контроля, бортовой и наземной аппаратурой моноимпульсных вторичных радиолокаторов, работающих в дискретно-адресном режиме и модернизированных до режима «8», радиовещательного автоматического зависимого наблюдения, аппаратурой международной системы спасания терпящих бедствие КОСПАС-САРСАТ, устанавливаемой на навигационных искусственных спутниках Земли Глонасс-К1 и его модификациях. Системный процессор обеспечивает формирование признаков наличия или отсутствия целостности воздушных судов с последующей передачей их экипажу, центрам управления и спасания на основе указанного объединения, что позволяет осуществить в реальном масштабе времени упреждающие, коррективные действия, необходимые для поддержания требуемого уровня безопасности полетов от взлета до посадки, а также оперативное определение местоположения воздушного судна в случае аварийной посадки без использования аварийных бортовых устройств регистрации. 1 з.п. ф-лы, 3 ил.
1. Способ непрерывного контроля целостности воздушных судов на всех участках полета, заключающийся в том, что на всех участках полета осуществляют непрерывную регистрацию с выхода датчиков через согласующее устройство, затем с помощью бортового системного процессора (БСП), портами для аналого-цифрового и цифроаналогового преобразования информации при ее вводе и выводе, таймером и соответствующим программным обеспечением проводят контроль, фиксацию и анализ упреждающих допусков определяющих диагностических параметров подсистем воздушных судов (ВС), влияющих на безопасность полетов, контроль и фиксацию действий экипажа по управлению ВС на различных этапах его полета, при этом при оценке действий экипажа в системе контроля используются предельно допустимое значение контролируемого параметра и упреждающий допуск, контроль и фиксацию прохождения разовых команд с выдачей соответствующих квитанций, фиксацию и обработку информации бортовых навигационных и пилотажных систем ВС (бортовой пилотажно-навигационный комплекс (БПНК), радио и изобарический высотомер, доплеровский измеритель скорости и угла сноса (ДИСС), автоматический радиокомпас (АРК), многоканальный совмещенный приемоиндикатор для определения местоположения ВС по сигналам спутниковой радионавигационной системы (СРНС) Глонасс и Навстар) для контроля местоположения ВС с формированием и выдачей признаков наличия или отсутствия целостности ВС, под которой понимается способность формирования с помощью системы контроля целостности на борту ВС в автономном режиме признака, обеспечивающего своевременное предупреждение экипажа в случаях, когда ВС нельзя использовать по назначению, отличающийся тем, что при нахождении определяющих диагностических параметров всех основных подсистем ВС в поле упреждающих допусков, при отсутствии нарушений экипажем ВС правил проведения полетов (ППП) и своевременном прохождении разовых команд, бортовой процессор системы (БПС) формирует признак целостности ВС Bn=0, который с дискретностью, определяемой типом ВС и участками полета, выводится экипажу в процессор линии передачи данных ВС (ПЛПД) для линии передачи данных ′′воздух-земля′′.
2. Способ непрерывного контроля целостности воздушных судов на всех участках полета по п.1, отличающийся тем, что при передаче данных «воздух земля» в режиме «S» для моноимпульсного радиолокатора или аппаратуры автоматического зависимого наблюдения (АЗН-В) осуществляют запрос всех оборудованных соответствующей аппаратурой ВС, а также адресный запрос и двусторонний обмен цифровой информацией между ВС и запросчиком, то есть выполняют функции избирательной адресации в линии передачи данных, которая обеспечивает организацию каналов, а также делит на сегменты и/или вновь компонует сообщение для передачи, на одном конце ПЛПД соединен с БПС, а на другом - с самой линией передачи данных ′′воздух-земля′′, затем после ПЛПД сообщения поступают в общий форматтер/администратор (ОФА) - функция на борту ВС, осуществляющая форматирование сообщений, подлежащих включению в регистры приемоответчиков (РПО), она также несет ответственность за выявление и обработку ошибок, таких как потеря входных данных, таким образом организуется линия связи ′′вниз′′ - термин, относящийся к передаче данных с борта ВС на землю; при выходе определяющих диагностических параметров подсистем ВС из поля упреждающих допусков, нарушении экипажем ВС (ППП) и не прохождении разовых команд БПС формирует признак отсутствия целостности ВС Bn=1, который с дополнительной световой и звуковой сигнализацией в непрерывном режиме выводится экипажу для принятия экстренных мер по спасанию ВС и транслируется по перечисленным выше каналам передачи СРНС Глонасс и системы спасания терпящих бедствие Коспас-Сарсат в центры управления и координационно-спасательные центры для определения местоположения и параметров полета ВС и оперативного определения местоположения воздушного судна в случае аварийной посадки, при этом в кадры информации, формируемые в линии связи «вниз» на борту ВС, вместе с признаком Bn=1 и координатами ВС, определяемыми с помощью СРНС, включают сигналы, содержащие сведения о состоянии авиационной техники, навигационных данных, действиях экипажа и прохождении разовых команд, при этом максимальная задержка от момента обнаружения неисправности, нарушения ППП и факта не прохождения разовых команд до передачи их признака Bn=1 не должна превышать требований международной организации гражданской авиации (ИКАО) к дискретности выдачи информации 0,125 с.
| "Авиапанорама", журнал, раздел "Наука-технологии", Москва, 2008, N4, с.16-17 | |||
| Железобетонный кожух для потолочных разделок дымовых труб | 1927 |
|
SU7755A1 |
| Устройство для отведения коньков от швинг на плосковязальных машинах | 1948 |
|
SU85055A3 |
| СИСТЕМА СБОРА, РЕГИСТРАЦИИ, ПЕРЕДАЧИ, ОБРАБОТКИ И АНАЛИЗА, ПРЕИМУЩЕСТВЕННО ПОЛЕТНОЙ ИНФОРМАЦИИ О ПАРАМЕТРАХ ДВИЖЕНИЯ ТРАНСПОРТНЫХ СРЕДСТВ, ПРЕИМУЩЕСТВЕННО ВОЗДУШНЫХ СУДОВ | 2001 |
|
RU2194307C1 |
| АВТОМАТИЗИРОВАННАЯ ВЫСОКОИНТЕЛЛЕКТУАЛЬНАЯ СИСТЕМА ОБЕСПЕЧЕНИЯ БЕЗОПАСНОСТИ ПОЛЕТОВ ЛЕТАТЕЛЬНОГО АППАРАТА | 2007 |
|
RU2339547C9 |
| СПОСОБ ИНДИКАЦИИ УГРОЗ И КОМАНД ПРЕДУПРЕЖДЕНИЯ СТОЛКНОВЕНИЙ В ВОЗДУШНОМ ПРОСТРАНСТВЕ | 2008 |
|
RU2373116C1 |
| US 5200901 A, 06.04.1993 | |||
| US 6766226 B2, 20/07/2004 | |||
| US 6654709 B2, 25.11.2003 | |||
| WO 2005109138 A1, 17.11.2005 | |||

