Изобретение относится к авиационной промышленности, а конкретно к способу перемещения в пространстве значительных по массе грузов и винтомоторной летательной системе для ее осуществления.
Известен способ перемещения в пространстве значительных по массе грузов [1], включающий воздействие на перемещаемый груз сил подъема силообразующими элементами, где сила подъема Pпод больше силы груза Pгр, регулирование вертикальной и горизонтальной тягами, а также процессом поворота и приземления.
Известно изобретение А.С.Корзинщикова многовинтовой системы, включающей 4 и 5 винтомоторных агрегатов, расположенных продольно на разных уровнях с перекрытием винтов [2], располагая полезный груз на жесткой решетчатой раме. Регулирование вертикальной тягой осуществлялось тремя горизонтально расположенными винтами, а горизонтальная тяга - поворотом переднего винтомоторного агрегата под углом к горизонтали. Таким образом, известно техническое решение в виде винтомоторной системы для осуществления способа перемещения значительных по массе грузов, содержащей совокупность винтомоторных агрегатов жестко и/или подвижно, взаимосвязанных между собой на несущей поверхности и с транспортируемым грузом [2].
Известна также многовертолетная подъемная система, защищенная патентом США N 3656723 B 64 D 9/00, в которой реализован способ перемещения в пространстве грузов с помощью вертолетов; их объединяют в единую жесткую летательную систему из двух, четырех и более вертолетов [3].
Известен также патент N 1526 Б.Н. Юрьева на изобретение "Многовинтовой геликоптер", заявленное 17.01.1922 г. МПК B 64 C 27/08 [4], которое содержит установленные на общей раме несколько винтомоторных групп, количество их должно быть по возможности большим для уменьшение опасности от остановки одного мотора. Это количество определяется 5-8 винтомоторными агрегатами. Многовинтовой геликоптер был снабжен системой самостоятельных устройств по управлению полетом, включая высоту полета, наклон платформы и поворота геликоптера (выбран в качестве прототипа).
С точки зрения способа, известные технические решения содержат недостаточную мощность для осуществления передвижения в пространстве сверхзначительных по массе грузов и предусматривают использование ограниченного количества видов силообразующих элементов для осуществления этих операций.
С позиций устройства, известные технические решения используют в качестве силообразующих элементов вертолеты, что для значительных систем, включающих более 8 вертолетов - экономически не выгодно, а устройства, использующие винтомоторные агрегаты, ограничивают их количество уменьшением опасности полета при остановке одного мотора. При многовинтовых летательных системах надежность должна быть значительно выше и обеспечивать безопасность полета при отказе больше, чем одного агрегата.
В основу настоящего изобретения положена задача создания способа перемещения в пространстве значительных по массе грузов и винтомоторной системы для ее осуществления, обеспечивающих создание более совершенной конструкции с увеличением весовой отдачи до 58-60%, что на 9-11% выше, чем у современных вертолетов типа МИ-26 (49%).
Поставленная задача достигается тем, что предлагаемый способ перемещения в пространстве значительных по массе грузов включает воздействие на перемещаемый груз сил, обеспечивающих подъем, поворот и приземление грузов при регулировании горизонтальной и вертикальной сил тяги силовой установки, выполненной в виде двигателей с реактивным или винтовым движителем, при этом силу тяжести перемещаемого груза компенсируют системой элементарных составляющих сил Pi, создаваемых силовыми установками с регулируемой мощностью, таким образом, что минимальное значение силы Pi для каждой силовой установки больше нуля и меньше или равно максимальному ее значению, причем количество силовых установок выбирают в пределах 3 или 5 или от 7 до 500, а результирующую силу подъема Pпод всех силовых установок, образованную суммой элементарных составляющих сил Pi выбирают в пределах
I ≤ (Pпод + Pгр) : Pгр ≤ 100,
а направление Pпод изменяют таким образом, чтобы угол между направлением результирующей силой подъема и направлением силы тяжести груза был больше или равен нулю, при этом силовые установки располагают на не пересекающихся между собой поверхностях выпуклой, вогнутой или плоской формы произвольной конфигурации, количество n1 которых выбирают от 1 до 10, причем силовые установки размещают на поверхностях платформы в точках приложения сил Pi на расстояние l1, которое выбирают из соотношения к максимальному расстоянию в следующих пределах:
1,001 ≤ (l1 + l2) : l2 ≤ 2.
Поставленная задача достигается тем, что предлагаемая винтомоторная летательная система, содержащая совокупность винтомоторных агрегатов и аппаратуру управления полетом, у которой узлы размещения винтомоторных агрегатов, количество n2 которых выбирают в пределах 5 ≤ n2 ≤ 300, жестко скреплены между собой соединительными элементами-балками, которые связаны в единую решетчатую поверхность, на которой винтомоторные агрегаты расположены на расстояниях l1 и по отношению к минимально допустимому расстоянию l2, выбираемых в пределах 2,1 ≤ (l1 + l2) : l2 ≤ 10,0, причем жесткое крепление соединительных элементов с узлами размещения винтомоторных агрегатов обеспечивается фигурными концами соединительных элементов, входящих в адекватные им по внутренней конфигурации консолей узлов размещения винтомоторных агрегатов и скрепляемых между собой запорными замками, а каждый узел размещения винтомоторных агрегатов снабжен дополнительными n3 консолями, выбираемыми в пределах 2 ≤ n3 ≤ 8 для шарнирного крепления стропов соединения их с транспортируемым грузом, а стропы взаимосвязаны с транспортируемым грузом через узел скольжения и фиксации, дающем возможность изменения длины стропов для обеспечения соотношения между минимальным значением угла αmin, расположенного между направлением результирующей силы подъема Pпод винтомоторных агрегатов и направлением веса груза Pгр, проходящего через центр его тяжести, и максимальным значением αmax этого угла, пределы которого выбирают из соотношения
1 ≤ (αmin+ αmax):αmax ≤ 2.
Причем у винтомоторной летательной системы балки выполнены в виде решетчатого крыла, в котором объем V1, занимаемый планами, выбран по отношению к общему объему V2 всего решетчатого крыла в пределах 0,3 ≤ (V1:V2) ≤ 1.
Согласно изобретению в винтомоторной летательной системе запорный замок (замковое соединение) выполнен в виде проушин, размещенных соосно на узле и балке, соединяемых болтом.
Кроме того, в винтомоторной летательной системе на соединительных элементах крепления узлов размещения винтомоторных агрегатов установлены газоотводные рукава, выхлопные отверстия которых расположены за пределами зоны воздухозабора других винтомоторных агрегатов.
Причем в винтомоторной летательной системе аппаратура управления полетом содержит АСУ, обеспечивающую автоматическую стабилизацию и управление работой винтомоторных агрегатов на всех режимах полета.
Для лучшего понимания принципа работы приведены чертежи, на которых изображено:
фиг. 1 - общий вид системы, обеспечивающей осуществление способа перемещения в пространстве значительных по массе грузов;
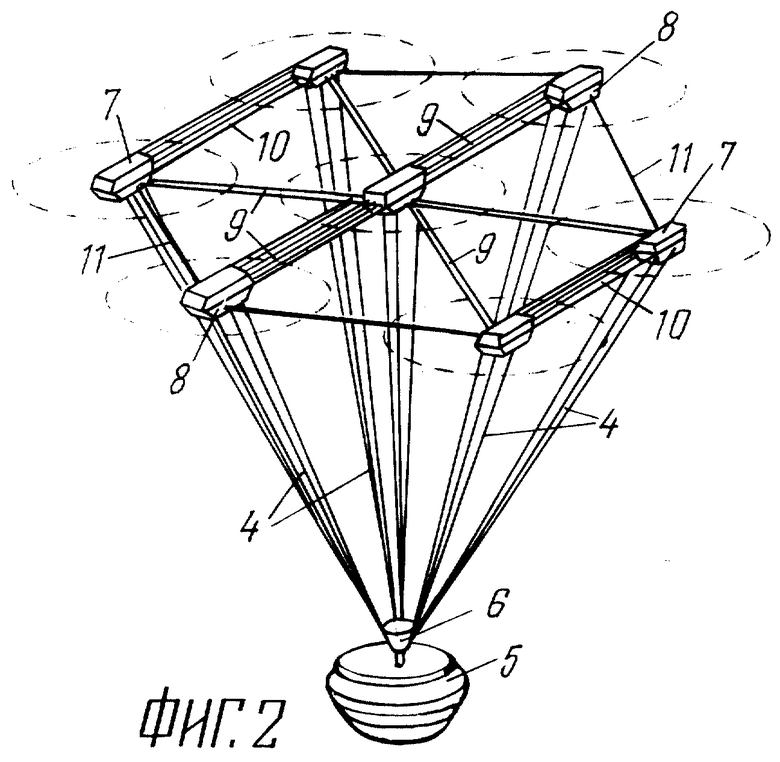
фиг. 2 - общий вид винтомоторной системы для осуществления способа перемещения грузов;
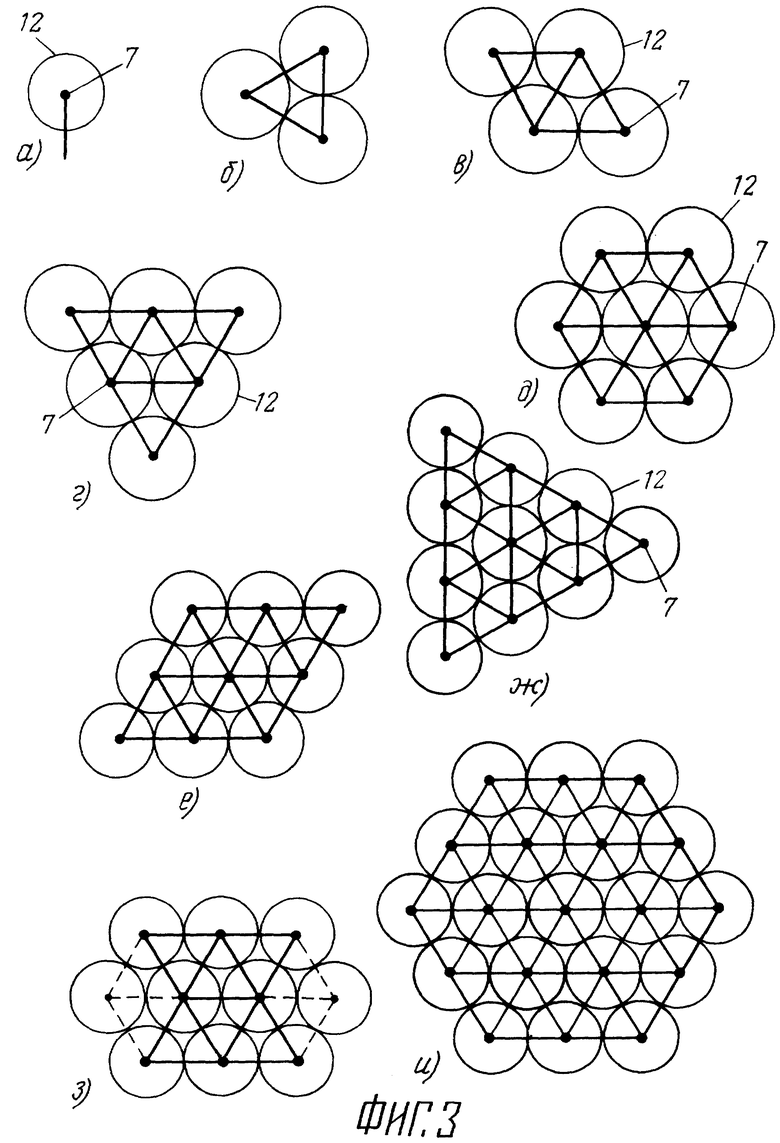
фиг. 3 - возможные схемные варианты создания винтомоторных систем;
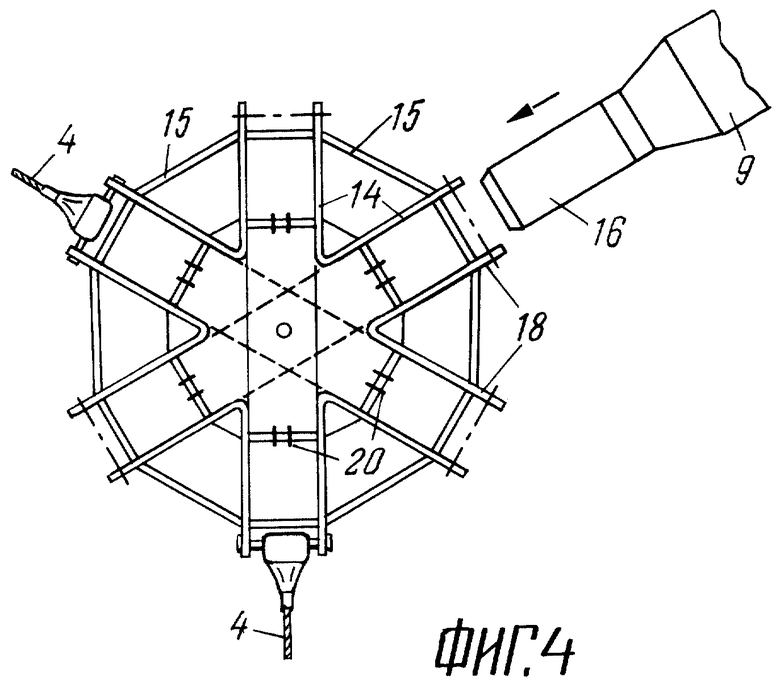
фиг. 4 - узел размещения винтомоторных агрегатов;
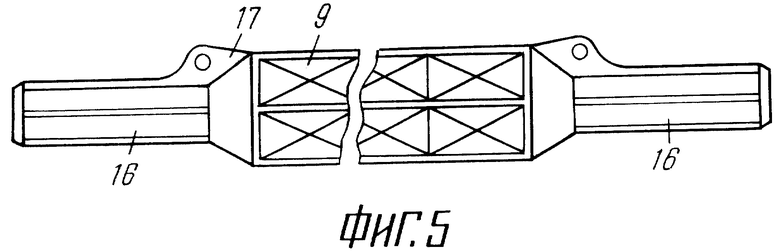
фиг. 5 - соединительный элемент балка - решетчатое крыло;
фиг. 6 - соединение узла размещения винтомоторного агрегата с замковым концом на балке;
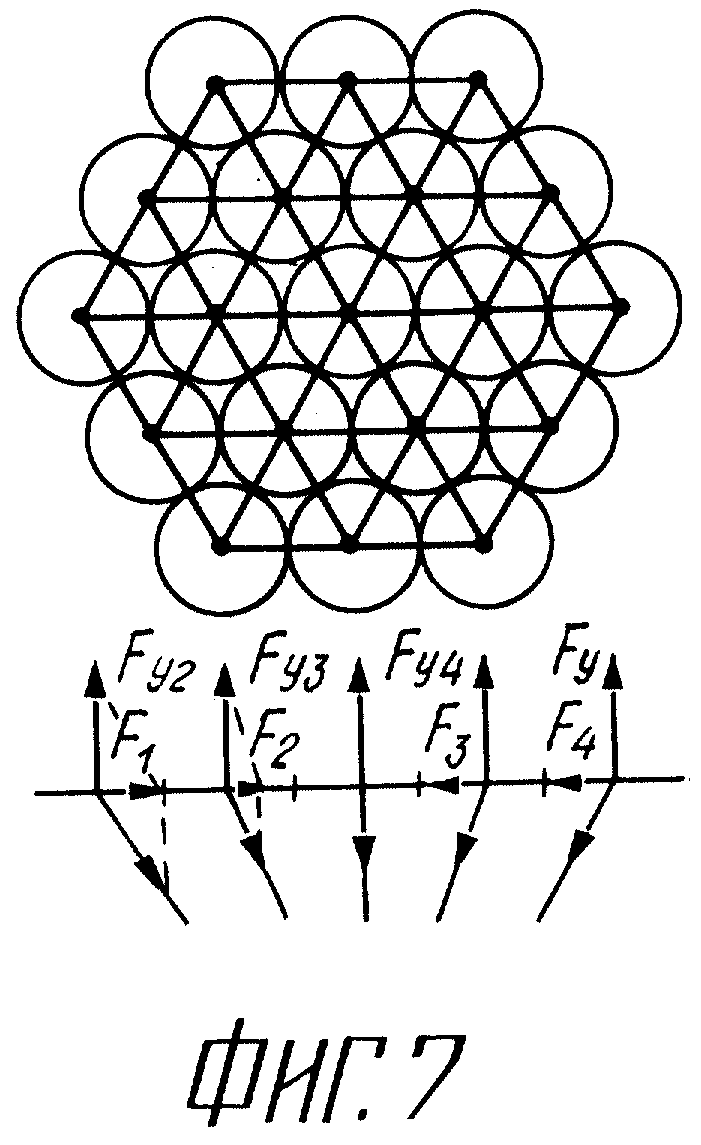
фиг. 7 - схема распределения нагрузки на сжатие в соединительных элементах при пяти и более винтомоторных агрегатов в ряду;
фиг. 8 - схема оптимальной формы поверхности для размещения силомоторных агрегатов;
фиг. 9 - схема автоматизированного управления полетом винтомоторной системы.
На фиг. 1 приведен общий вид системы, обеспечивающей осуществление способа перемещения в пространстве значительных по массе грузов, содержащей силовые установки 1, размещенные на поверхностях 2 и жестко связанные между собой соединительными элементами 3, причем к поверхности 2 в местах установки силовых установок крепятся стропы 4, которые связаны с перемещаемым грузом 5 с помощью узла скольжения и фиксации 6 стропов 4. Винтомоторная система, изображенная на фиг. 2, содержит винтомоторные агрегаты 7, установленные на узлах 8 (фиг. 4) и соединенные между собой балками в виде, например, решетчатого крыла 9 (фиг. 5), на которых установлены газовые трубы 10 для отвода выхлопных газов, все наружные агрегаты 7 связаны растяжками 11, а стропы 4 через узел скольжения и фиксации 6 связаны с перемещаемым грузом 5. Соединение каждых трех близко расположенных узлов 8 блоками 9 создают на поверхности 2 фигуры равносторонних треугольников, комбинации которых позволяют получить различные схемы системы. На фиг. 3 приведены комбинации размещения винтомоторных агрегатов 7: а - унифицированный винтомоторный агрегат 7 с условной окружностью 12 вращения лопастей; б - унифицированный блок из трехвинтомоторных агрегатов 7; в - схема системы из четырех агрегатов 7, г - схема системы из шести агрегатов 7; д - система из семи агрегатов 7; е - схема из девяти агрегатов 7; ж и з - система из десяти агрегатов 7, и - схема системы из девятнадцати агрегатов 7.
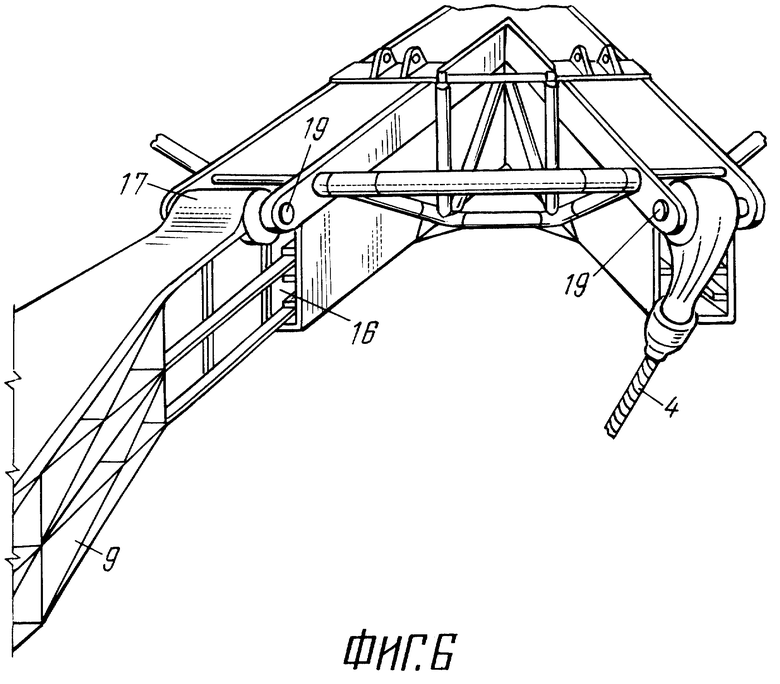
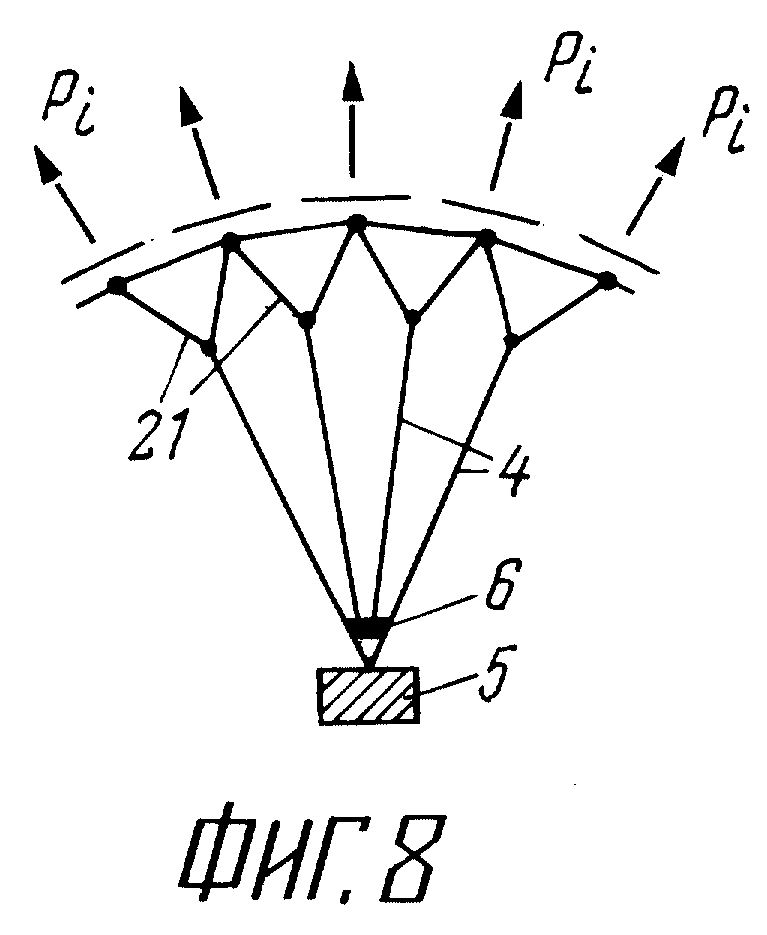
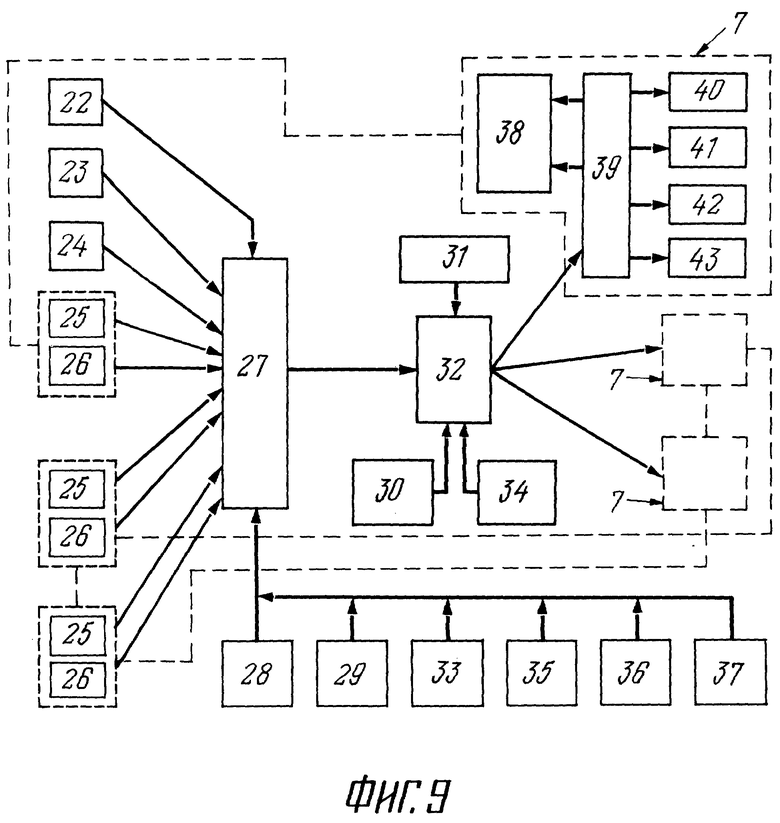
Узел 8 размещения винтомоторных агрегатов 7 (фиг. 4) содержит продольное пустотелое основание 13 и жестко связанные с ним аналогичной конструкции консоли 14, имеющие силовые связки 15. В пустотелое основание 13 и/или консоли 14 вводится один замочный конец 16 балки - решетчатое крыло 9. На замковом конце 16 установлены проушины 17, которые симметрично входят между двумя проушинами 18 и узла 8 и с помощью болта 19 жестко крепятся друг к другу (фиг. 6). Противоположный замковый конец 16 балки 9 аналогичным образом соединяется с другим узлом 8 размещения винтомоторного агрегата 7, и с помощью соответствующих проушин 17 и 18 и болта 19 также соединяются и крепятся друг к другу. На каждом узле 8 размещения винтомоторных агрегатов 7 установлены для их крепления кронштейны 20. Для ликвидации усилий сжатия в блоках 8, образуемых в результате взаимодействия сил винтомоторных агрегатов 7 и сил натяжения стропов 4, в удаленных от центра системы точках на концах каждой балки устанавливаются дополнительные стропные элементы 21. Управление винтомоторной системой осуществляется с помощью автоматизированной системы управления (АСУ) (фиг. 9). АСУ включает гидровертикаль 22, курсовую систему 23, скоростной гироскоп 24, датчики 25 нагрузки на стропах 4, датчики 26 нагрузки на балке 9, преобразователь 27, астрокомпас 28, измеритель 29 скорости, программу 30 режимов нормального полета, пульт управления 31, бортовой компьютер 32, измеритель высоты 33, программу 34 режимов аварийного полета, навигационный автомат 35, прицел 36, радиосистему посадки 37, двигатели 38, сервоприводы 39, автомат-перекос 40, шаг несущего винта 41, тандеры 42 стропов 4, фиксаторы 43 узла подвески и скольжения.
Перемещение в пространстве значительных по массе грузов, как показано на фиг. 1, осуществляется следующим образом.
Перемещение в пространстве значительных по массе грузов осуществляется с помощью силовых установок 1, в качестве которых могут быть использованы, например, винтомоторные агрегаты, двигатели с реактивной тягой и т.п., которые размещают на поверхностях 2 и связанных между собой соединительными элементами 3, причем к поверхности 2 в местах размещения силообразующих элементов крепятся стропы 4, которые связывают с перемещаемым грузом 5 с помощью узла скольжения и фиксации 6 стропы 4.
При этом результирующую силу тяжести Pгр перемещаемого груза компенсируют системой элементарных составляющих сил P1, создаваемых силовыми установками, таким образом, что соотношение между минимальным значением силы Pi min и максимальным значением силы Pi max выбирают в пределах 1 ≤ (Pi min + Pi max) : Pi max ≤ 2, где i выбирают в пределах 2 ≤ i ≤ 500. Рассматривая минимальный предел соотношения сил (Pi min + Pi max) : Pi max = 1, относящийся к одному силообразному элементу, следует отметить, что равенство выполнимо только тогда, когда минимальные значения сил равны нулю, а при максимальном значении предела Pi min = Pi max, причем минимальное количество силовых установок i = 2, 3, 10, 20 может относиться к применению в этом способе винтомоторных агрегатов, например, соответствующих узлов от вертолетов, а максимальное значение i = 500 применимо к использованию в данном способе силовым установкам в виде турбинных, турбореактивных или реактивных двигателей с небольшими габаритами, средней мощностью и на поверхностях 2, расположенных в несколько рядов. Соотношение между минимальным значением Pi min сил любой из силовых установок и максимальным значением Pm max любого из силообразующих элементов выбирают в пределах 1 ≤ (P1 min + Pm max): Pm max ≤ 2. Соотношение (P1 min + Pm max) : Pm max с указанными пределами относится к возможности регулирования мощности отдельной силовой установки, в необходимых случаях снижая мощность отдельных агрегатов почти до 0, тогда P1 min=0, или обеспечивая равномерную работу всех агрегатов тогда P1 min = Pm max, а (P1 min + Pm max): Pm max = 2. Результирующую подъемную силу Pпод= ∑Pl выбирают по отношению к силе тяжести Pгр груза в пределах 1 ≤ (Pпод + Pгр) ≤ 100. Пределы, предусмотренные в этом выражении, определяют широкие возможности способа за счет регулирования диапазона результирующей подъемной силы по отношению к силе тяжести груза: при их равенстве тогда соотношения равно минимальному пределу - 1 и в 100 раз больше силы тяжести груза при верхнем пределе значения, а направление регулирующей силы Pпод изменяю.т в пространстве таким образом, что соотношение между минимальным углом αmin, расположенным между направлением результирующей силы Pпод и направлением силы Pгр и максимальным значением этого угла αmax, выбирают в пределах 1 ≤ (αmin+ αmax):αmax ≤ 2. . При минимальном значении угла αmin= 0° происходит вертикальный подъем или посадка перемещаемого в пространстве груза, в этом случае выражение (αmin+ αmax):αmax = 1, при (αmin+ αmax):αmax = 2 происходит горизонтальное перемещение груза, причем значение 90°> α <90°+ Δα, где Δα = 2÷5°. Силовые установки располагают на не пересекающихся между собой поверхностях n1 произвольной формы и конфигурации, где n1 выбирают в пределах 1 ≤ n1 ≤ 10, причем соотношение минимальных r1 и максимальных r2 значений радиусов кривизны поверхностей, которые выбирают в пределах 1 ≤ (r1 + r2) : r2 ≤ 2. Использование всех значений в пределах формулы (r1 + r2) : r2 подтверждает, что поверхности n1 могут иметь самые различные формы: в виде купола, чаши, плоскостей.
Соотношение минимальных расстояний l1 между точками приложения результирующих сил каждого из силообразующих элементов и их максимальными расстояниями l2 выбирают в пределах
1,001 ≤ (l1 + l2) : l2 ≤ 2,0
по площади размещения на поверхностях.
Это соотношение пределов позволяет использовать любые силовые установки и размещать их в непосредственной близости, как, например, реактивные двигатели, и на достаточном удалении друг от друга - вертолетные двигатели.
Винтомоторная система для осуществления способа перемещения в пространстве значительных по массе грузов работает следующим образом. Совокупность винтомоторных агрегатов 7 жестко и/или на шарнирах взаимосвязана между собой на поверхности 2 их расположения и с транспортируемым грузом 5 (фиг. 2), причем узлы 8 в количестве n2, где n2 выбирают в пределах 3 ≤ n2 ≤ 300 размещения винтомоторных агрегатов, соединенных между собой балками в виде, например, решетчатого крыла 9, на которых установлены газовые трубы 10 для отвода выхлопных газов от заборов воздуха сзади в одном ряду расположенных винтомоторных агрегатов 7. Винтомоторная система при n2 = 3 будет включать три винтомоторных агрегата 7, три узла 8 для их размещения по схеме (фиг. 3б). Использование максимального количества агрегатов 7 (300 шт.) может быть осуществлено, например, следующими вариантами: n2 = 4 - по 75 агрегатов 7, при n2 = 10 по 30 агрегатов на каждой поверхности. На фиг. 3 приведены различные комбинации размещения винтомоторных агрегатов 7. Так, на фиг. 3а приведен унифицированный винтомоторный агрегат 7 с условной окружностью 12 вращения лопастей; на фиг. 3б - унифицированный блок из трех винтомоторных агрегатов 7; 3в - схема системы из четырех агрегатов 7, 3г - схема системы из шести агрегатов 7; 3д - система из семи агрегатов 7; 3е - схема из девяти агрегатов 7; 3ж и з - система из десяти агрегатов 7, 3и - схема системы из девятнадцати агрегатов 7. Узлы 8 расположены друг от друга на расстояниях l1, которые выбраны к минимально допустимому расстоянию l2, в пределах 1,4 ≤ (l1 + l2): l2 ≤ 10. В том же случае если предел равен минимальному значению, происходит перекрытие винтов, т.е. расстояние l1 между центрами винтомоторных агрегатов 7 меньше диаметра окружности, образуемой винтами агрегатов 7. В случае если предел стремится к максимальному значению, расстояние между этими центрами равно нескольким диаметрам. Винты будут работать на предельно близком расстоянии друг от друга не касаясь, расстояние (l1+l2): l2 = 2.
Узел 8 размещения винтомоторных агрегатов 7 (фиг. 4) состоит из продольного пустотелого основания 13 и жестко связанных с ним аналогичной конструкции консолей 14, количество n3 которых выбирают в пределах 2 ≤ n3 ≤ 8. Причем при минимальном значении n3 = 2 может быть создана система не более чем из трех агрегатов, при максимальном значении n3= 8 количество агрегатов в системе может быть практически неограниченным. На корпусе агрегата 7 установлены кронштейны 20 для крепления винтомоторных агрегатов 7.
В основание 13 и консоли 14 узла 8 вводятся замочные концы 16 балки - решетчатое крыло 9, на которых установлены проушины 17, симметрично проушинам 18 на узлах 8 с помощью болта 19 происходит жесткая фиксация узла 8 и балки 9. Другой конец балки 9 аналогичным образом устанавливают на узлах 8. С целью придания жесткости и прочности сооружения установлены силовые связки 15, на которых могут размещаться емкости с жидким топливом. Балка - решетчатое крыло 9 выбрано с целью уменьшения веса конструкции и уменьшения ее веса в процессе полета за счет аэродинамических свойств. Поэтому предусмотрено заполнение пространства объема V1 балки 9 конструкционным материалом по отношению к общему объему V2 балки в пределах 0,3 ≤ V1 : V2 ≤ 1, где при минимальном значении (V1: V2) = 0,3 конструкция балки будет легкой, практически невесомой в полете, при V1 : V2 = 1 конструкция балки будет обладать прочностью, но значительно утяжелит в целом винтомоторную систему, концы стропов 4 шарнирно крепятся к противоположно расположенным на поверхности 2 консолям 14 узлов 8, при этом стропы 4 проходят через узел 6 скольжения и фиксации, обеспечивая возможность изменения длины стропов 4. Соотношение минимального значения угла αmin между направлением результирующей подъемной силы винтомоторных агрегатов и направлением веса груза, проходящего через центр его тяжести, и максимальным значением αmax этого угла выбирается в пределах 1 ≤ (αmin+ αmax):αmax ≤ 2. При этом минимальное значение угла α = 0° обеспечивается при условии (αmin+ αmax):αmax = 1. Увеличение значения αmax определяет появление в балках сил сжатия (см. фиг. 7). Устраняются силы сжатия и обеспечивается прочность и надежность конструкции системы тем, что стропы 4 через дополнительные стропные элементы 21 будут воздействовать на концы балок 9 и иметь радиальное направление к выпуклой поверхности 2 (фиг. 8). Для посадки винтомоторной системы на площадку каждый узел 8 имеет посадочное шасси, при этом стропы 4 максимально убираются специальными устройствами. При равномерной мощности всех винтомоторных агрегатов 7 система приподнимается над грузом 5, производится жесткое крепление груза 5 к узлу 6 скольжения и фиксации стропов 4, и производят его подъем и транспортировку. Во время транспортировки поверхность 2 имеет наклон в направлении движения системы на угол α = 2÷10°, а передние стропы по длине более короткие, чем задние, тем не менее, за счет узла 6 скольжения и фиксации груз 5 всегда занимает горизонтальное положение. Управление полетом осуществляется с помощью АСУ (фиг. 9), обеспечивающей автоматическую стабилизацию и управление всеми режимами работы винтомоторной системы на всех режимах полета. АСУ принципиально не отличается от известных систем управления летательных аппаратов. Дополнительно в нее внесены такие элементы как датчики 25 и 26 нагрузок на стропы 4 и балки 9, сигналы которых после необходимых преобразований поступают на бортовой компьютер 32 и после обработки - на сервоприводы 39, управляющие тандерами 42 стропов 4, узлами скольжения и фиксации 6, автоматами перекоса 40. Необходимую корректировку режима полета вносят через ручной пульт управления. В АСУ предусмотрена также программа 34 режимов аварийного полета, которая предусматривает обеспечение устойчивого полета при разрушениях различных частей конструкции (обрыв стропов, поломка балок, выход из строя винтомоторных агрегатов и т.п.).
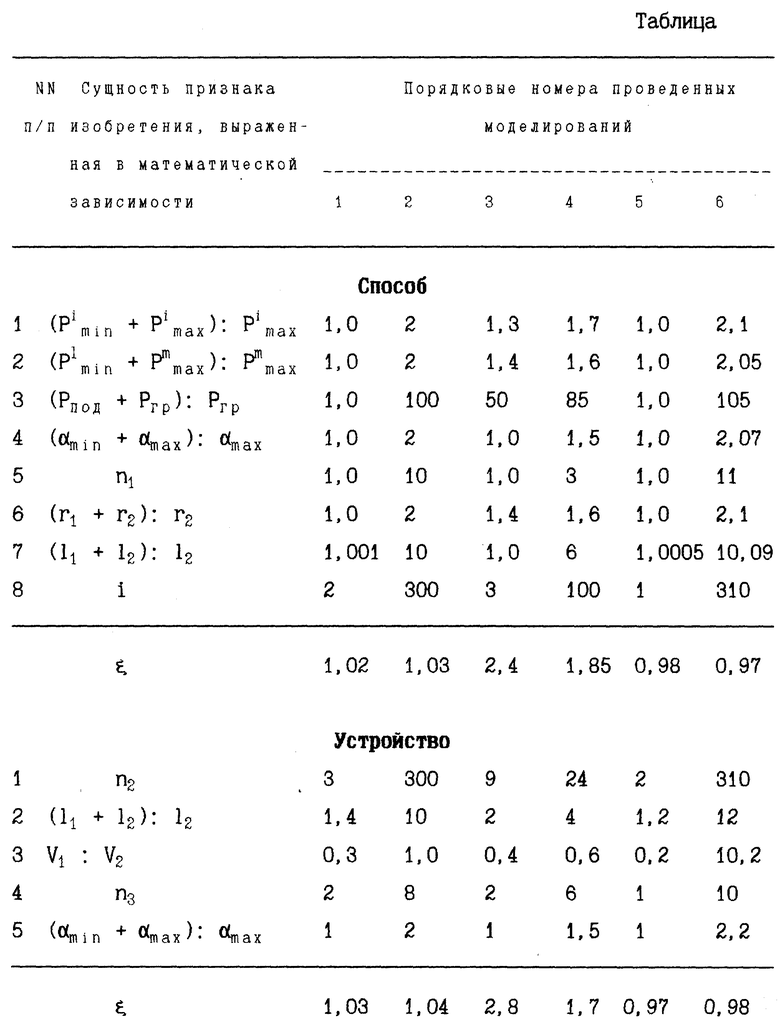
Как показали проведенные исследования, указанный технический результат подтверждается, в частности, примерами моделирования данных объектов изобретения, при описании которых нецелесообразно повторять в каждом примере общую для них информацию, отраженную в формуле и описании изобретения. При описании примеров практического моделирования необходимо привести только количественную информацию, отличающую один пример от другого, которая для удобства сопоставления изложена в таблице (способ и устройство).
Для сопоставления возможностей достижения указанного технического результата в каждом из примеров оказалось целесообразным использовать параметр ξ, характеризующий получение более высокого результата весовой отдачи (до 9 - 11%) по сравнению с лучшими достижениями отечественного и зарубежного вертолетостроения и прототипом.
Рассмотрим примеры проведенных исследований, результаты которых достигнуты на основании статистической обработки материалов. Нижние и верхние значения, отраженные в таблице заявляемых пределов (примеры 1 и 2) были получены преимущественно исходя из условия приближения параметров ξ к 1(ξ1= 1,02, ξ2= 1,03 - по способу и ξ1= 1,03, ξ2= 1,04 - по устройству), а также с учетом других известных обстоятельств, накладывающих ограничения на заявляемые пределы. В оптимальных примерах 3 практической реализации заявляемых объектов были достигнуты наиболее высокие значения параметров ξ3 = 2,4 - по способу и ξ3 = 2,8 - по устройству. В произвольных вариантах осуществления заявляемых объектов положительный результат достигался по сравнению с известными системами за счет создания оптимальных конструктивных решений, отраженных в примере 4 ξ4 = 1,85 - по способу и ξ4 = 1,7 - по устройству).
При выходе за нижние (пример 5) и верхние (пример 6) значения заявляемых пределов указанный технический результат составляет ξ5 = 0,98, ξ6 = 0,97 - по способу и ξ5 = 0,97, ξ6 = 0,98 - по устройству.
Настоящее изобретение с учетом может быть использовано для осуществления перевозок больших и объемных грузов, при строительстве таких крупных промышленных объектов, как кран грузоподъемностью до 700 т, грузопассажирский транспорт, включая круизные полеты, а также для взлета и посадки большегрузных самолетов на неподготовленных площадках (в качестве вертолетоносителя) и как военно-транспортная система.
Список литературы
1. Юрьев Б. Н. Аэродинамический расчет вертолетов. М., Гос. изд. оборонной промышленности. 1956, с. 101-104.
2. Далин В.Н. Конструкция вертолетов. М., "Машиностроение", М., 1971, с. 19.
3. Патент США N 3656723, МПК B 64 D 9/00, 1972 г. (прототип).
4. Патент СССР N 1526 Б.Н. Юрьева "Многовинтовой геликоптер", МПК B 46 C 27/08, 1926.
Способ и система могут быть использованы при авиационных перевозках крупногабаритных грузов, при строительстве крупных промышленных объектов и в военно-транспортной авиации. Винтомоторная система представляет собой несущую конструкцию, состоящую из балок, связанных в единую решетчатую поверхность. Винтомоторные агрегаты расположены в узлах крепления и размещены по всей поверхности конструкции, которая может иметь выпуклую, вогнутую или плоскую форму и произвольную конфигурацию, а количество поверхностей, на которых размещены винтомоторные агрегаты может быть от 1 до 10. Груз с помощью узла фиксации и скольжения подвешивается на стропах, которые шарнирно соединены с балками. Результирующую силу подъема Рпод, образованную суммой элементарных составляющих сил, производимых винтомоторными агрегатами выбирают в пределах I ≤ (Pпод + Pгр) : Pгр ≤ 100, где Pгр - вес груза. Перемещение груза осуществляют изменением угла между Рпод и Pгр. Все это позволяет повысить весовую отдачу системы и производить перемещение значительных по массе грузов. 2 с. и 5 з.п. ф-лы, 1 табл., 9 ил.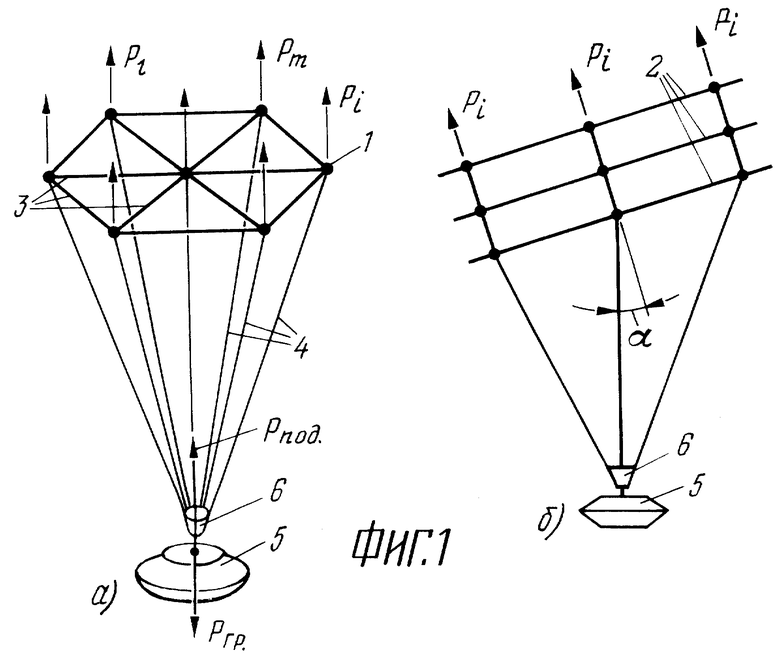
1 ≤ (Pпод + Pгр) : Pгр ≤ 100,
а направление Pпод изменяют таким образом, чтобы угол между направлением Pпод и направлением силы тяжести груза был больше или равен нулю, при этом силовые установки располагают на непересекающихся между собой поверхностях выпуклой, вогнутой или плоской формы и произвольной конфигурации, количество которых n1 выбирают от 1 до 10.
1,001 ≤ (l1 + l2) : l2 ≤ 2.
2,1 ≤ (l1 + l2) : l2 ≤ 10,0
причем жесткое крепление соединительных элементов с узлами размещения винтомоторных агрегатов обеспечивается фигурными концами соединительных элементов, входящих в адекватные им по внутренней конфигурации консолей узлов размещения винтомоторных агрегатов и скрепляемых между собой запорными замками, а каждый узел размещения винтомоторных агрегатов снабжен дополнительными n3 консолями, выбираемыми в пределах 2 ≤ n3 ≤ 8 для шарнирного крепления строп соединения их с транспортируемым грузом, а стропы взаимосвязаны с транспортируемым грузом через узел скольжения и фиксации, дающем возможность изменения длины строп для обеспечения соотношения между минимальным значением угла αmin, расположенного между направлением результирующей силы подъема Pпод винтомоторных агрегатов и направлением веса груза Pгр, проходящего через центр его тяжести, и максимальным значением αmax этого угла в пределах выбирают из соотношения
1 ≤ (αmin+αmax):αmax≤ 2.
4. Винтомоторная летательная система по п.3, отличающаяся тем, что балки выполнены в виде решетчатого крыла, в котором объем V1, занимаемый планами выбран по отношению к общему объему V2 всего решетчатого крыла в пределах 0,3 ≤ (V1 : V2) ≤ 1.
| US 3656723 A, 11.10.72 | |||
| Юрьев Б.Н | |||
| Аэродинамический расчет вертолетов | |||
| - М.: Гос | |||
| изд-во оборонной промышленности, 1956, с.101 - 104 | |||
| Далин В.Н | |||
| Конструкция вертолетов | |||
| - М.: Машиностроение, 1971, с.19 | |||
| SU, 1526, 1926. |
