Изобретение относится к машиностроению, в частности к устройствам для преобразования неравномерного вращательного движения в равномерное вращательное и наоборот.
Из предшествующего уровня техники известен механизм для преобразования движения, RU 2374526, F16H 25/04 (2006.01), в котором использован ромбический шарнирный четырехзвенник с пальцами, взаимодействующими с кулачком и направляющими.
Известен роторно-лопастной двигатель с механизмом связи Кауэрца, содержащий механизм связи лопастей, выполненный в виде кривошипно-шатунного механизма, связанного с осью вращения роторов посредством зубчатой передачи (Г.Г. Гуськов. Необычные двигатели. М.: Знание, 1971, с. 25, рис. 12).
Общими недостатками этих механизмов являются большая нагрузка на детали конструкций ввиду преобразования движения через одноконтурные потоки передачи мощности, невозможность обеспечения в течение расчетной части периода полной блокировки одного из потоков мощности при одновременном чистом преобразовании второго потока мощности и связанный с последним недостатком относительно малый КПД этих механизмов в целом при наличии паразитной нагрузки от одного из потоков мощности противопоставленного полезной нагрузке снимаемой при этом со второго потока мощности.
Также известен механизм для преобразования движения, являющийся наиболее близким аналогом к заявленному, который применен в составе роторно-лопастного двигателя внутреннего сгорания, RU 2225513, F01C 1/077 (2000.01), в котором применен сдвоенный мальтийский механизм, причем один крест механизма повернут относительно другого на половину угла мальтийского креста, а дифференциал преобразует вращательно-прерывистое движение рабочих валов во вращение выходного вала двигателя с постоянной угловой скоростью.
Этот механизм позволяет реализовать обеспечение полной попеременной блокировки одного из потоков мощности при одновременном чистом преобразовании второго потока мощности.
Недостатком данного устройства является отсутствие плавности преобразования движения и большие ударные нагрузки в момент остановки мальтийского креста.
Целью изобретения и техническим результатом представляемого технического решения является достижение плавности преобразования движения, повышение КПД и надежности механизма.
Указанная цель достигается тем, что в механизме, который содержит корпус, общий вал, симметричный дифференциальный редуктор, 2 кольца дифференцированных потоков мощности, 2 кулачка с внутренней рабочей поверхностью, установленных на кольцах дифференцированных потоков мощности, 2 кулачка с наружной рабочей поверхностью, установленных на общем валу, 2 ползуна с пальцами, установленных на направляющих, закрепленных на корпусе, основные нагрузки по преобразованию потоков мощности приходятся на симметричный дифференциальный редуктор, а остальные элементы механизма частично воспринимают нагрузки по преобразованию потоков мощности, обеспечивают плавность преобразования движения, с возможностью выделения в течение расчетных частей полного оборота общего вала периодов чистого преобразования одного из потоков мощности при полной блокировке другого потока мощности с условием, что на один полный оборот общего вала приходится по одному полному обороту колец.
Сущность изобретения поясняется чертежами, на которых изображено:
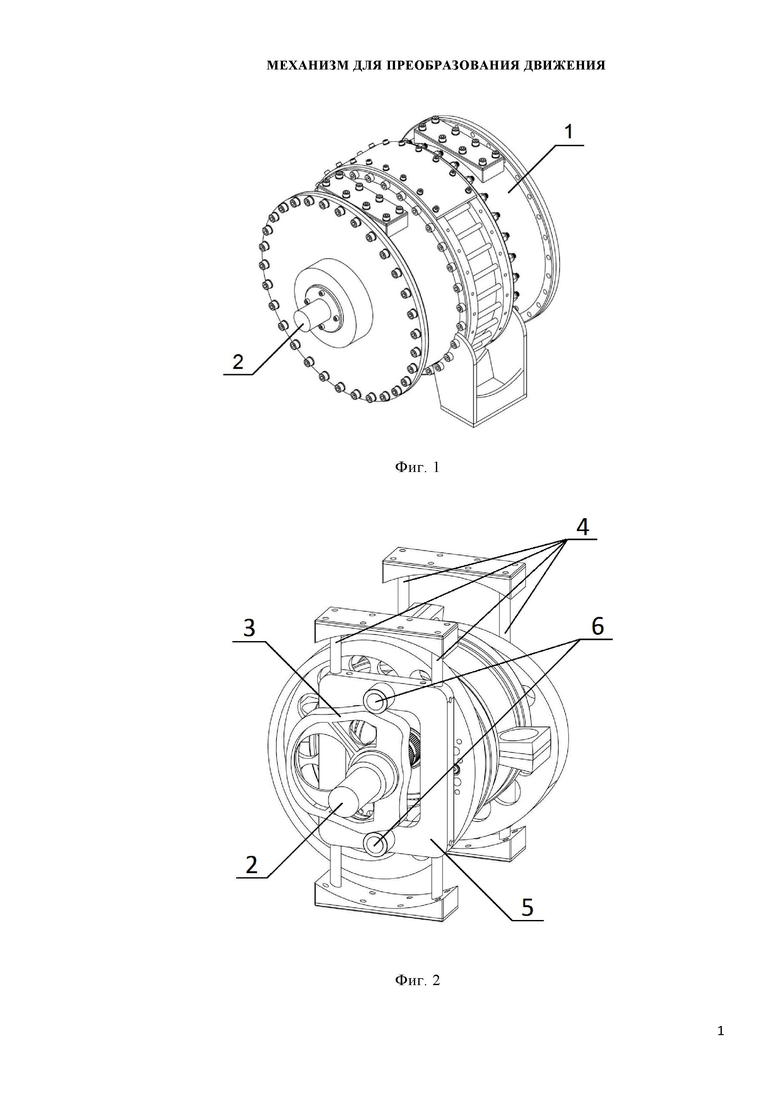
на фиг. 1 изображен общий (изометрический) вид механизма для преобразования движения;
на фиг. 2 - общий (изометрический) вид механизма без корпуса;
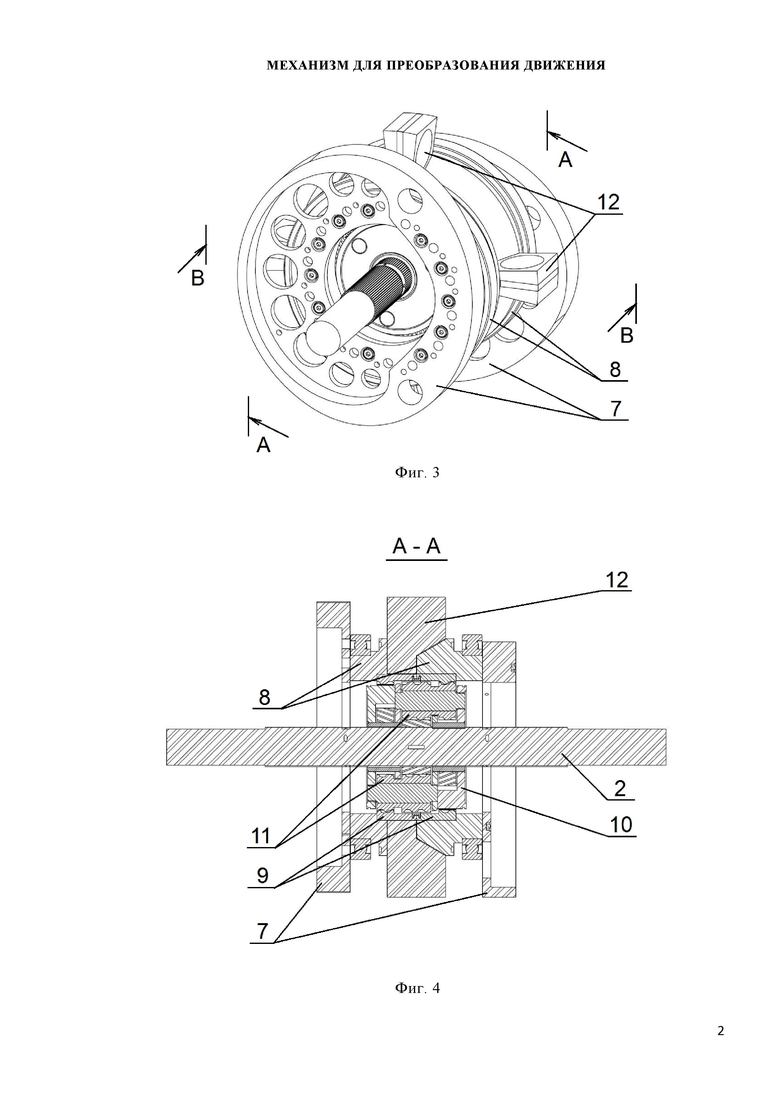
на фиг. 3 - изометрический вид механизма без корпуса, кулачков с наружной рабочей поверхностью и ползунов с пальцами;
на фиг. 4 - разрез А-А на фигуре 3;
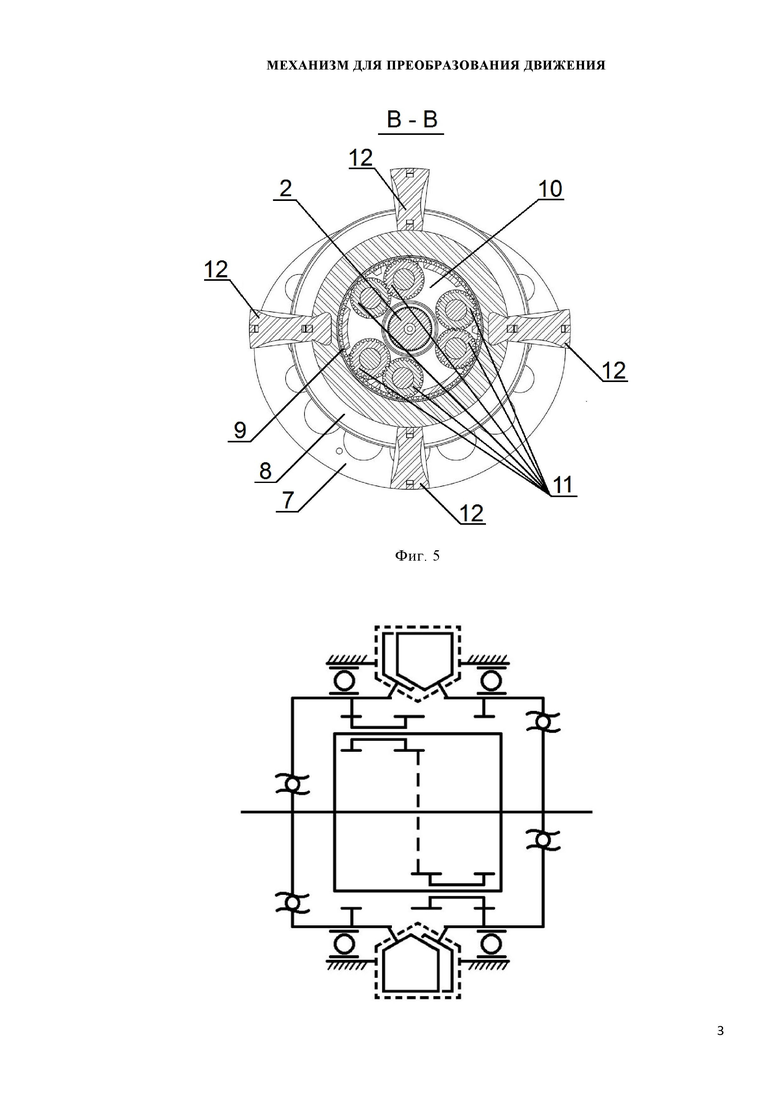
на фиг. 5 - разрез В-В на фигуре 3;
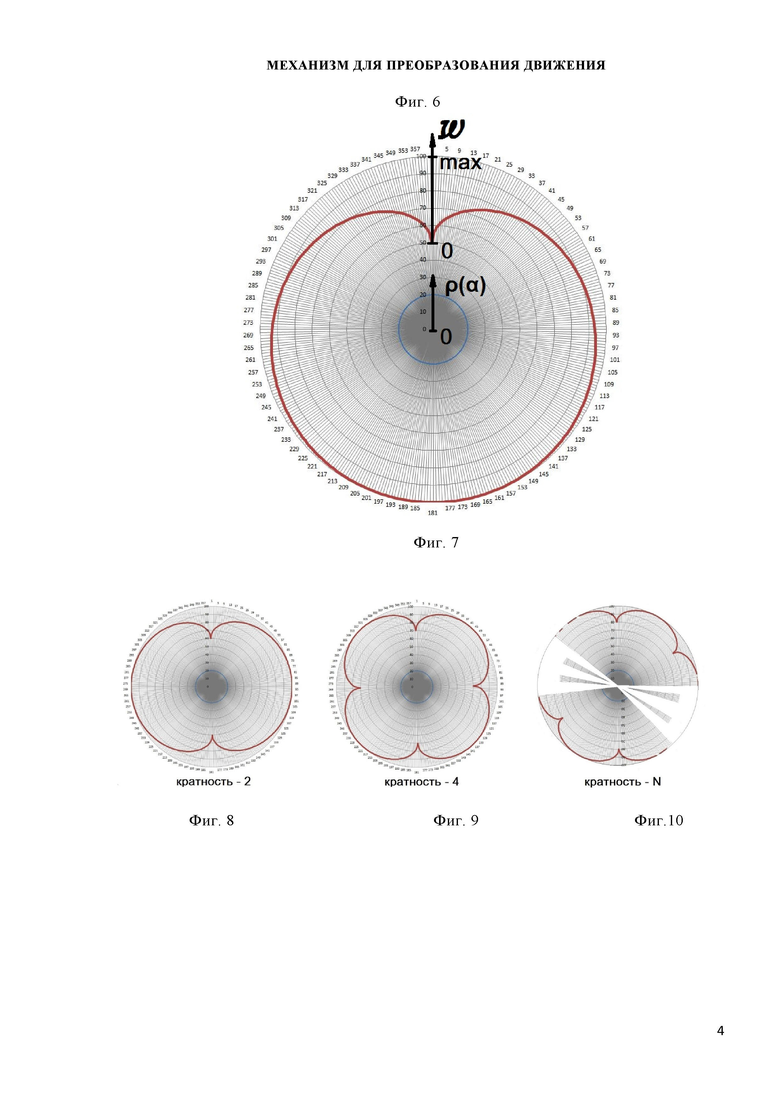
на фиг. 6 - кинематическая схема механизма;
на фиг. 7 - простейшая базовая кривая;
на фиг. 8, 9, 10 - примеры базовых кривых с разной кратностью (2, 4, N) остановок потоков;
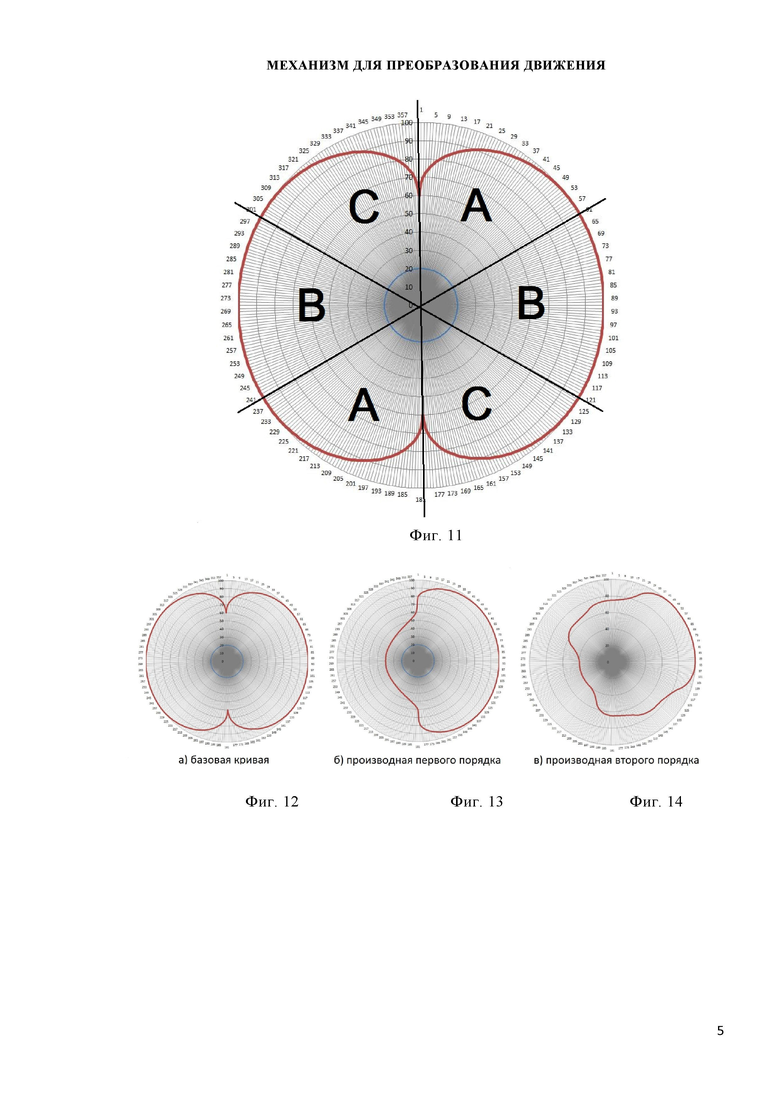
на фиг. 11 - базовая кривая, применяемая к предлагаемому механизму;
на фиг. 12, 13, 14 - базовая кривая с ее производными первого и второго порядка;
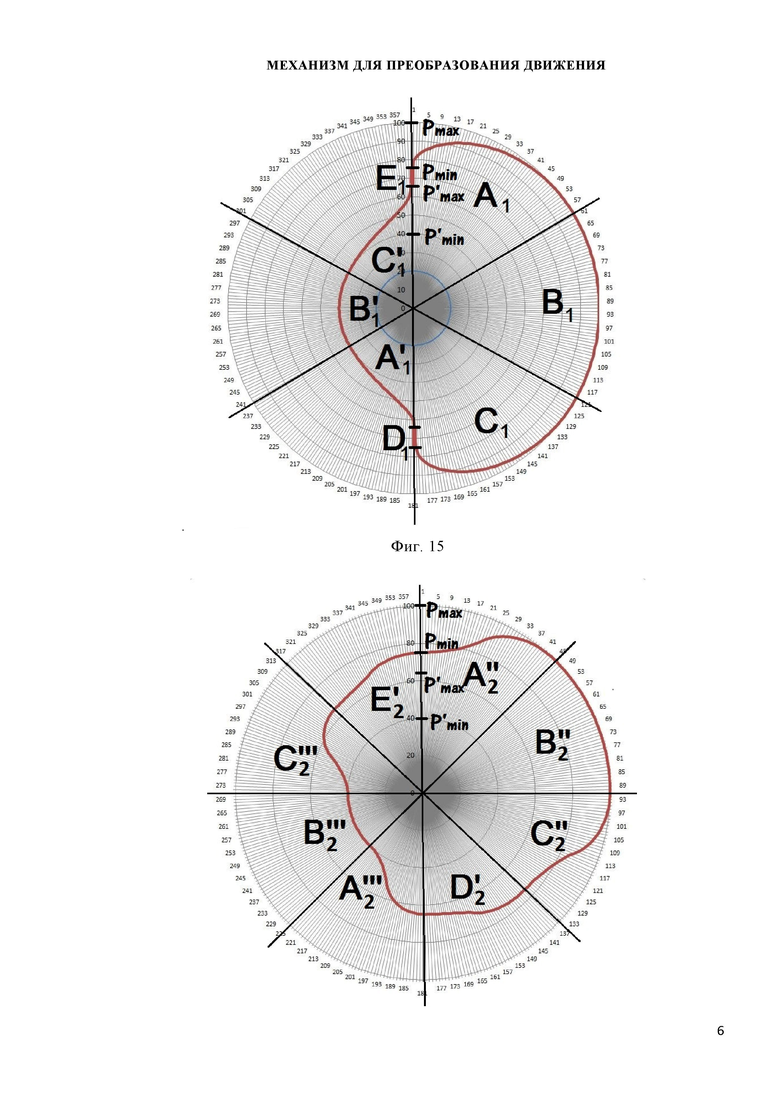
на фиг. 15 - производная кривая первого порядка;
на фиг. 16 - производная кривая второго порядка;
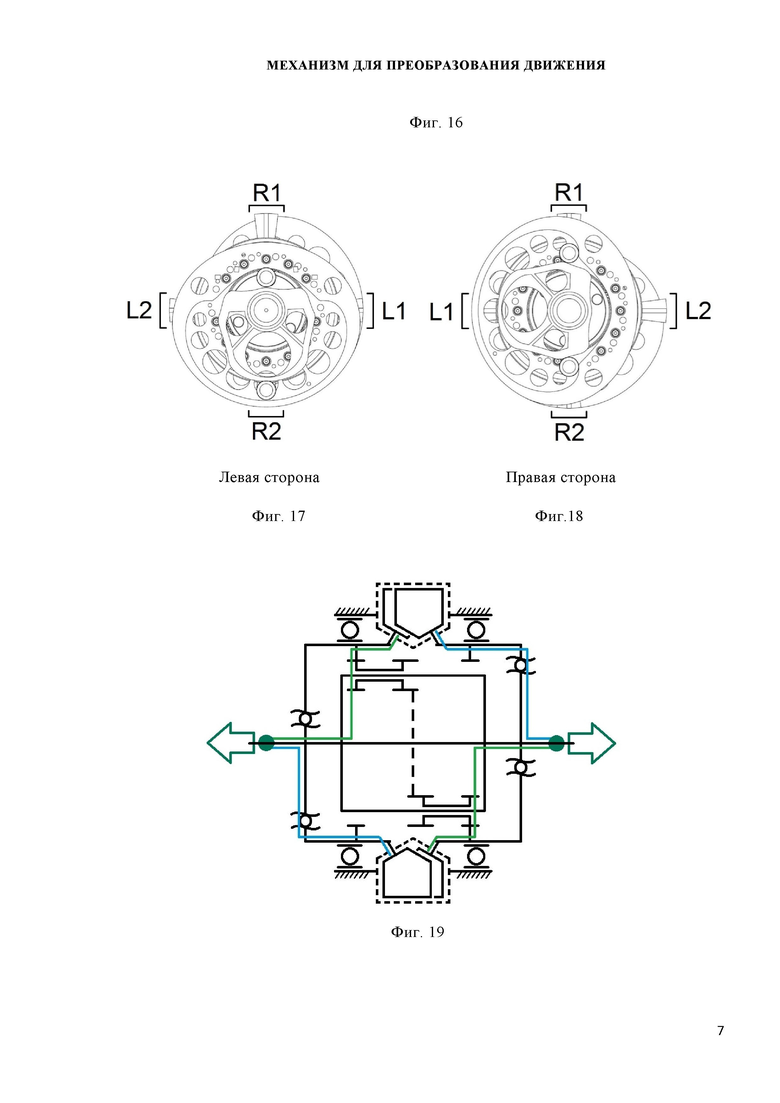
на фиг. 17 и 18 - исходное положение составляющих механизма с левой и правой сторон соответственно;
на фиг. 19 - схема потоков мощности;
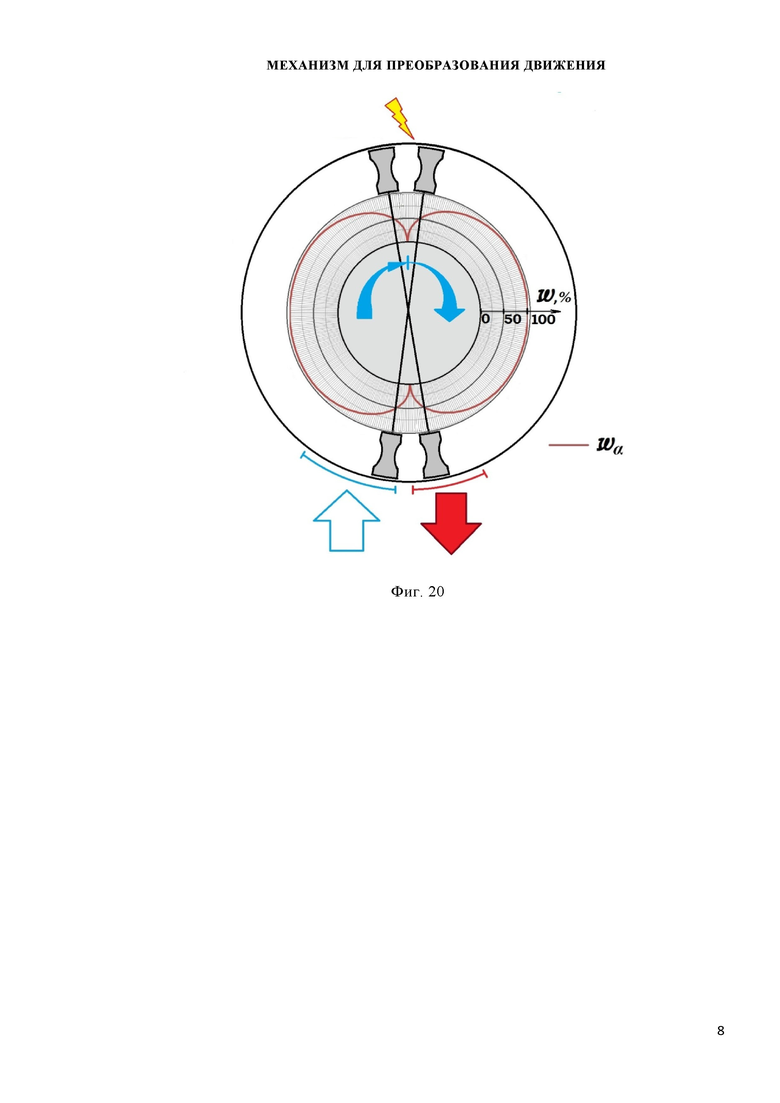
на фиг. 20 - схематическое отображение состояния равных скоростей на базе графика изменения угловой скорости в виде базовой кривой.
Поясняющие изобретения и чертежи не охватывают, а тем более не ограничивают весь объем притязаний данного технического решения, а являются лишь иллюстрирующими материалами частного случая его выполнения.
Предлагаемый механизм (Фиг. 1) содержит корпус 1, в котором с возможностью вращения установлен общий вал 2.
На валу 2 жестко закреплены кулачки с наружной рабочей поверхностью 3 (Фиг. 2). В корпусе закреплены направляющие 4, по которым свободно перемещаются ползуны 5 с пальцами 6.
Кулачки с внутренней рабочей поверхностью 7 (Фиг. 3) установлены на кольцах дифференцированных потоков мощности 8.
Кольца дифференцированных потоков мощности 8 выполнены заодно с эпициклическими шестернями 9 симметричного дифференциального редуктора, который своим водилом 10 концентрично и жестко установлен на общем валу 2.
Симметричный дифференциальный редуктор в данном случае представляет собой планетарный редуктор, в котором дифференцированные потоки мощности передаются с каждой стороны через симметричные эпициклические шестерни 9 на симметричные сателлитные шестерни 11, по 3 с каждой стороны на свой поток мощности. Сателлитные шестерни разных потоков мощности соединены попарно через наружное зубчатое зацепление и закреплены на осях, которые закреплены в едином водиле 10, с которого суммированный поток мощности передается на общий вал 2.
Кинематическая схема механизма для преобразования движения представлена на Фиг. 6.
В исходном конструктивном исполнении кулачки с наружной рабочей поверхностью 3 расположены под углом 90 градусов относительно друг друга. На их рабочих поверхностях в вертикальной плоскости с двух сторон расположены по два пальца 6, которые, в свою очередь, с других своих сторон по радиусу контактируют с рабочими поверхностями кулачков с внутренней рабочей поверхностью 7.
В предложенном конструктивном исполнении механизм для преобразования движения выполнен с обеспечением возможности за один оборот общего вала осуществления двукратной попеременной блокировки каждого из потоков мощности при одновременном чистом преобразовании второго потока мощности с обеспечением стабильного положения останавливаемых при этом элементов относительно корпуса механизма. За один полный оборот общего вала происходит по одному полному обороту каждого из колец.
Выполнение указанного алгоритма обусловлено формой эквидистант, определяющих профили кулачков.
Эквидистанта, определяющая профиль кулачков с внутренней рабочей поверхностью, образована производной первого порядка от базовой замкнутой кривой, а эквидистанта, определяющая профиль кулачков с наружной рабочей поверхностью, образована производной второго порядка от базовой замкнутой кривой.
Простейшая базовая замкнутая кривая описывается зависимостью полярного радиуса от полярного угла с условием обеспечения наиболее плавного изменения полярного радиуса и условием, при котором касательная к базовой кривой в точке максимального полярного радиуса совпадает с касательной к окружности описанной тем же полярным радиусом, а касательная к базовой кривой в точке минимального полярного радиуса совпадает с самим минимальным полярным радиусом.
Уравнение таковой кривой описывается формулой:
 , [1]
, [1]
где ρ(α) - полярный радиус;
ρ(α)min - задаваемая величина минимального полярного радиуса;
Δρ(α) - задаваемый диапазон изменения величин полярного радиуса;
α=0…360 - полярный угол;
αmax - задаваемая величина полярного угла для полярного радиуса максимальным значением;
Δα - задаваемый диапазон изменения полярного угла, при котором полярный радиус однократно изменяется в пределах между минимальным и максимальным значением.
Простейшая базовая замкнутая кривая также может служить для отражения зависимости изменения угловой скорости w колец дифференцируемых потоков мощности от угла их поворота относительно исходного положения.
При использовании формы простейшей базовой замкнутой кривой, показанной на Фиг. 7, для получения эквидистант, определяющих профиль кулачков, собранный с такими кулачками механизм преобразования движения обеспечит возможность осуществления за один оборот общего вала однократной попеременной остановки каждого из потоков мощности. При этом остановленный поток не задерживается в положении, при котором его угловая скорость w равна нулю, а сразу после остановки начинает новый разгон.
Для получения эквидистант, определяющих профиль кулачков с обеспечением возможности за один оборот общего вала осуществления многократной попеременной остановки каждого из потоков, формулы для расчета базовых кривых необходимо применять аналогичным способом, но с разбиением на количество периодов, соответствующих требуемой кратности блокировки каждого из потоков.
Пример форм таковых кривых с характеристиками кратности периодов 2, 4 и N представлен на Фиг. 8, Фиг. 9 и Фиг. 10.
Для получения эквидистант, определяющих профиль кулачков обеспечивающих возможность попеременной остановки каждого из потоков на требуемый период времени, в состав базовой замкнутой кривой необходимо включать соответствующие отрезки с постоянным полярным радиусом, разбивающие базовую кривую в местах ее выхода на максимальный полярный радиус.
Длина отрезков с постоянным максимальным полярным радиусом характеризует длительность периодов чистого преобразования одного из потоков мощности при полной блокировке другого потока мощности и может корректироваться для оптимизации длительности периодов разгона-остановки потоков мощности для минимизации остаточных сил инерции и паразитных нагрузок на механизм.
Для получения эквидистант, применимых для представленного технического решения механизма преобразования движения с обеспечением возможности за один оборот общего вала осуществления двукратной попеременной длительной остановки каждого из потоков, формула базовой кривой примет следующий вид:
• для участков А и С (Фиг. 15) - аналогично формуле простейшей базовой кривой:
, [2]
• для участков В:
ρ(α)=ρ(α)max,
где ρ(α)max - максимальный полярный радиус.
Условием применимости к механизму для преобразования движения с симметричным дифференциальным редуктором является соблюдение требования по симметричности одноименных участков кривой относительно центра круга, а также участков А с участками С относительно линии минимального полярного радиуса.
Рассмотрим получение производных первого и второго порядка (Фиг. 12, 13 и 14) от базовой замкнутой кривой, для получения эквидистант, определяющих профиль кулачков для предложенного конструктивного исполнения механизма для преобразования движения.
Для получения профиля кулачка с внутренней рабочей поверхностью, необходимо построить производную первого порядка ρ1(α) от базовой замкнутой кривой.
Для участков А1, В1 и С1 (Фиг. 15) формулы расчета кривой применяются идентичные формулам расчета базовой кривой.
Для участков А1 и С1:
 , [3]
, [3]
для участка В1:
ρ1(α)=ρ(α)max,
а для участков А'1 и С'1 формула примет вид:
 , [4]
, [4]
где ρ'1(α) - полярный радиус производной первого порядка от базовой кривой для участков А'1 и С'1;
ρ'(α)max - задаваемая величина максимального полярного радиуса для участков А'1 и С'1;
Δρ'(α) - задаваемый диапазон изменения величин полярного радиуса в пределах участков А'1 и С'1;
α=0…360 - полярный угол;
αmin - задаваемая величина полярного угла для полярного радиуса с минимальным значением на текущем участке;
Δα - задаваемый диапазон изменения полярного угла, при котором полярный радиус однократно изменяется в пределах между минимальным и максимальным значением в расчетном периоде.
Для участка В'1 формула примет вид:
ρ'(α)=ρ'(α)min,
где ρ'(α)min - задаваемая величина минимального полярного радиуса для участков А'1 и С'1.
При этом в состав производной первого порядка от базовой замкнутой кривой могут вводиться участки D1 и E1 равной длины, которые разрывают участки А1 и С'1, а также А'1 и С1 для обеспечения перемещения пальца по рабочей поверхности кулачка в момент блокировки потока мощности для перераспределения нагрузки в течение времени этой блокировки по рабочей поверхности кулачка и устранения возможного эффекта наклепа. Участки D1 и E1 должны пролегать вдоль полярных радиусов и соединять собой концы участков А1 и С'1, а также А'1 и С1.
Кроме того, должны соблюдаться условия равенства:
- угловой длины участков: А1=А'1, В1=В'1 и С1=С'1;
- Δρ'(α)=Δρ(α).
Для получения профиля кулачка с наружной рабочей поверхностью необходимо построить производную второго порядка  (Фиг. 16) от базовой замкнутой кривой.
(Фиг. 16) от базовой замкнутой кривой.
Для введенных в состав производной первого порядка от базовой замкнутой кривой отрезков D и Е на производной второго порядка необходимо выделять участки угловой длительностью, соответствующей требуемой относительной длительности блокировки интегрируемых потоков мощности.
При этом принимаем во внимание, что для работоспособности механизма, включая совместимость со свойствами симметричного дифференциального редуктора, угловая протяженность участков должна соответствовать равенствам:
 =
= =
= =
=
 =
= =
= =
= .
.
Величины минимальных и максимальных полярных радиусов в начальных и конечных точках участков второй производной базовой кривой должны быть равны соответствующим полярным радиусам начальных и конечных точек на соответствующих участках первой производной базовой кривой.
Кроме того, необходимо соблюдение равенства соотношений угловых длин участков  , определяющее правильное соотношение остальных участков кривых первого и второго порядка.
, определяющее правильное соотношение остальных участков кривых первого и второго порядка.
В дальнейших вычислениях все участки кроме  и
и  разбиваются по среднему полярному углу αmid на две части αmin-αmid и αmid-αmax с равной угловой протяженностью, где
разбиваются по среднему полярному углу αmid на две части αmin-αmid и αmid-αmax с равной угловой протяженностью, где
 .
.
Для участков  и
и  формула примет вид на частях в пределах между αmin и αmid:
формула примет вид на частях в пределах между αmin и αmid:
 , [5]
, [5]
а на частях в пределах между αmax и αmid:
 , [6]
, [6]
где ρ"(α) - полярный радиус производной второго порядка;
ρ(α)max - заданная величина максимального полярного радиуса для текущих участков;
ρ(α)min - заданная величина минимального полярного радиуса для участков текущих участков;
Δρ(α) - заданный диапазон изменения величин полярного радиуса для участков текущих участков;
α=0…360 - полярный угол;
αmin - заданная величина полярного угла для полярного радиуса с минимальным значением для текущих участков;
αmax - заданная величина полярного угла для полярного радиуса с максимальным значением для текущих участков;
Δα - задаваемый диапазон изменения полярного угла, при котором полярный радиус однократно изменяется в пределах между минимальным и максимальным значением в расчетном периоде.
Для участков  и
и  формула примет вид на частях в пределах между αmax и αmid:
формула примет вид на частях в пределах между αmax и αmid:
 , [7]
, [7]
а на частях в пределах между αmin и αmid:
 . [8]
. [8]
Для участков  и
и  формула примет вид на частях в пределах между αmax и αmid:
формула примет вид на частях в пределах между αmax и αmid:
 , [9]
, [9]
а на частях в пределах между αmin и αmid:
 . [10]
. [10]
Для участка формула примет вид:
ρ"(α)=ρ(α)max.
Для участка формула примет вид:
ρ"(α)=ρ'(α)min.
Для простоты изложения принципа работы механизма преобразования движения представим его в составе роторно-лопастного двигателя внутреннего сгорания, у которого на кольцах потоков мощности в диаметрально противоположных позициях расположено по два поршня 12. Линии, проходящие через середины диаметрально противоположных поршней, перпендикулярны осям симметрии кулачков с внутренней рабочей поверхностью на каждой из сторон.
Также для простоты изложения дадим следующие наименования: для кулачка с внутренней рабочей поверхностью - «ухо», для кулачка с наружной рабочей поверхностью - «щека». Разные стороны воздействия потоков мощности обозначим как «правый» и «левый».
Примем название участков рабочих поверхностей ушей и щек в соответствии с обозначением аналогичных участков кривых производных от базовой замкнутой кривой.
Механизм работает следующим образом.
Исходным положением элементов примем состояние, при котором оси симметрии ушей правой и левой сторон перпендикулярны друг другу, а оси симметрии щек также перпендикулярны друг другу и при этом щеки серединами своих рабочих поверхностей  обращены в ту же сторону, что и середины рабочих поверхностей В1 ушей (Фиг. 17 и 18).
обращены в ту же сторону, что и середины рабочих поверхностей В1 ушей (Фиг. 17 и 18).
Исходным положением для стороны остановленного потока мощности является та сторона, где ползун 5 (Фиг. 2) находится в положении концентричности с общим валом 2, а его пальцы 6 находятся посередине поверхностей D1 и E1 уха и поверхностей  и
и  щеки. Поршни этой стороны при этом соответственно находятся в исходном заблокированном состоянии. Назовем эту сторону правой. На левой стороне пальцы ползуна контактируют с рабочими поверхностями уха и щеки соответственно серединами поверхностей В1, В'1 и , .Поршни левой стороны при этом находятся в середине своего рабочего хода.
щеки. Поршни этой стороны при этом соответственно находятся в исходном заблокированном состоянии. Назовем эту сторону правой. На левой стороне пальцы ползуна контактируют с рабочими поверхностями уха и щеки соответственно серединами поверхностей В1, В'1 и , .Поршни левой стороны при этом находятся в середине своего рабочего хода.
Вращение кольца 9 на левой стороне от воздействия на поршень L1 (Фиг. 17 и 18) расширяющихся газов вызывает вращение общего вала посредством кинематических связей в редукторе. Тем временем, между поршнями L1 и R2 происходит такт выпуска, между поршнями R2 и L2 происходит такт впуска, а между поршнями L2 и R1 происходит такт сжатия.
В течение времени контакта пальцев с поверхностями В1, В'1, и уха и щеки левой стороны, расположенные на общем валу щеки также вращаются в том же направлении, что и вращающееся кольцо с ухом, но со скоростью 3/4 от его скорости в соответствии со свойствами симметричного дифференциального редуктора. Ввиду того, что поршни правой стороны заблокированы, происходит чистое преобразовании потока мощности редуктором вплоть до момента, когда левые ухо и щека одновременно достигают позиции расположения пальцев началами участков А1 и . Правая щека тем временем достигает позиции пальцев началами участков и  При накате участком А1 левого уха на палец, происходит смещение пальца в направлении оси общего вала и, соответственно, передача усилия через ползун и парный палец на участок рабочей поверхности левой щеки. Таким образом, на левой щеке, а соответственно через общий вал и на правой щеке, создается дополнительный крутящий момент. Правая щека участком рабочей поверхности накатывается на палец, происходит смещение пальца в направлении от оси общего вала и, соответственно, передача усилия через ползун и парный палец на участок С1 рабочей поверхности правой щеки. На правой щеке возникает дополнительный крутящий момент. Происходит раскрутка закрепленного на правой щеке кольца 9 с поршнями 12.
При накате участком А1 левого уха на палец, происходит смещение пальца в направлении оси общего вала и, соответственно, передача усилия через ползун и парный палец на участок рабочей поверхности левой щеки. Таким образом, на левой щеке, а соответственно через общий вал и на правой щеке, создается дополнительный крутящий момент. Правая щека участком рабочей поверхности накатывается на палец, происходит смещение пальца в направлении от оси общего вала и, соответственно, передача усилия через ползун и парный палец на участок С1 рабочей поверхности правой щеки. На правой щеке возникает дополнительный крутящий момент. Происходит раскрутка закрепленного на правой щеке кольца 9 с поршнями 12.
Передача момента с левой на правую сторону происходит как через связку: левое ухо - пальцы на ползуне - левая щека - общий вал - правая щека - пальцы на ползуне - правое ухо, так и через редуктор.
Так как кольцо, соединенное с левым ухом, тормозит выполненную заодно с ней эпициклическую шестерню симметричного дифференциального редуктора, то через кинематические связи редуктора на другом эпицикле и, соответственно, на правом кольце возникает раскручивающее его усилие.
Левое ухо, накатываясь на ролик, тормозится вследствие возникновения встречного усилия, вызванного сопротивлением от преодоления энергии покоя элементов правой стороны, а также сопротивлением от воздействия на поршни L1 и L2 комбинации сил рабочих процессов двигателя. Правое ухо, в свою очередь, раскручивается как от кинематического воздействия на него через механизм преобразования, так и от возникающего в дальнейшем давления на поршень R1 расширяющихся рабочих газов.
Происходит контролируемое профилем эквидистант равномерное симметрично-антагонистичное изменение величины и направления векторов скоростей колец 9 с поршнями 12 вплоть до полной остановки замедлявшихся элементов и полной раскрутки ускорявшихся элементов.
При этом максимальное сближение замедляющихся и ускоряющихся поршней происходит в момент, когда их скорости уравниваются, а их позиции равноудалены от места остановки. Схематично на Фиг. 20 этот момент отображен с использованием графика изменения угловой скорости в виде базовой кривой.
Дальнейшая работа механизма происходит в той же последовательности попеременно для каждой стороны. За один оборот общего вала происходит по два полуоборота колец в челночном режиме.
Переменные потоки мощности, передаваемые от двух сторон, интегрируются в равномерный поток мощности на общем валу.
Обратным способом механизм преобразования движения может использоваться для дифференцирования потока мощности от общего вала на два потока, например, в составе компрессора.
При использовании механизма преобразования движения в составе роторно-лопастного двигателя внутреннего сгорания, на базе расчета сил инерции и сил, воздействующих на поршни от рабочих процессов двигателя, необходимо подбирать оптимальное соотношение участков А(С) и В базовой кривой для минимизации периодов возникновения паразитных сил.
При использовании механизма преобразования движения в составе компрессора, для увеличения плавности работы механизма участок В базовой кривой можно минимизировать.
| название | год | авторы | номер документа |
|---|---|---|---|
| РОТОРНЫЙ ДВИГАТЕЛЬ ВНУТРЕННЕГО СГОРАНИЯ | 2020 |
|
RU2754184C1 |
| МЕХАНИЗМ ДЛЯ ПРЕОБРАЗОВАНИЯ ДВИЖЕНИЯ | 2007 |
|
RU2374526C2 |
| РОТОРНЫЙ ДВИГАТЕЛЬ ВНУТРЕННЕГО СГОРАНИЯ | 2016 |
|
RU2651106C2 |
| РОТОРНО-ПОРШНЕВОЙ ДВИГАТЕЛЬ С ВНЕШНИМ ПОДВОДОМ ТЕПЛА | 2008 |
|
RU2387844C2 |
| РОТОРНАЯ РАСШИРИТЕЛЬНАЯ МАШИНА | 2015 |
|
RU2619391C1 |
| МЕХАНИЗМ ПРЕОБРАЗОВАНИЯ ДВИЖЕНИЯ | 2013 |
|
RU2531854C2 |
| СПАСАТЕЛЬНАЯ ШЛЮПКА С УСТРОЙСТВОМ ДЛЯ ОБЕСПЕЧЕНИЯ ЕЕ ХОДА | 2011 |
|
RU2479462C1 |
| СПОСОБ ОБРАБОТКИ РЕЗАНИЕМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1986 |
|
SU1823295A1 |
| МЕХАНИЗМ ПЕРЕДАЧИ ВРАЩАТЕЛЬНОГО ДВИЖЕНИЯ С ЗАПАЗДЫВАНИЕМ И МЕХАНИЗМ РУЛЕВОГО УПРАВЛЕНИЯ КОЛЕСАМИ ЗАДНЕГО МОСТА С ЕГО ИСПОЛЬЗОВАНИЕМ | 2017 |
|
RU2657163C1 |
| СПОСОБ УПРАВЛЕНИЯ ПРОЦЕССОМ СОВМЕЩЕННОЙ ОБРАБОТКИ РЕЗАНИЕМ И ПОВЕРХНОСТНО-ПЛАСТИЧЕСКИМ ДЕФОРМИРОВАНИЕМ | 1990 |
|
RU2036068C1 |
Изобретение относится к машиностроению, в частности к устройствам для преобразования неравномерного вращательного движения в равномерное вращательное и наоборот. Механизм для преобразования движения содержит корпус, общий вал, симметричный дифференциальный редуктор. Кроме того, он содержит два кольца дифференцированных потоков мощности, два кулачка с внутренней рабочей поверхностью и два с наружной рабочей поверхностью, а также два ползуна с пальцами. Профили кулачков с внутренней рабочей поверхностью описываются зависимостью полярного радиуса от полярного угла и представляют собой эквидистанту, отстоящую на величину радиуса пальца наружу от производной первого порядка базовой замкнутой кривой. Профиль кулачков с наружной рабочей поверхностью описывается зависимостью полярного радиуса от полярного угла и представляет собой эквидистанту, отстоящую на величину радиуса пальца внутрь от производной второго порядка базовой замкнутой кривой. За один оборот вала происходит по два полуоборота колец в челночном режиме. Достигается плавность работы. 20 ил.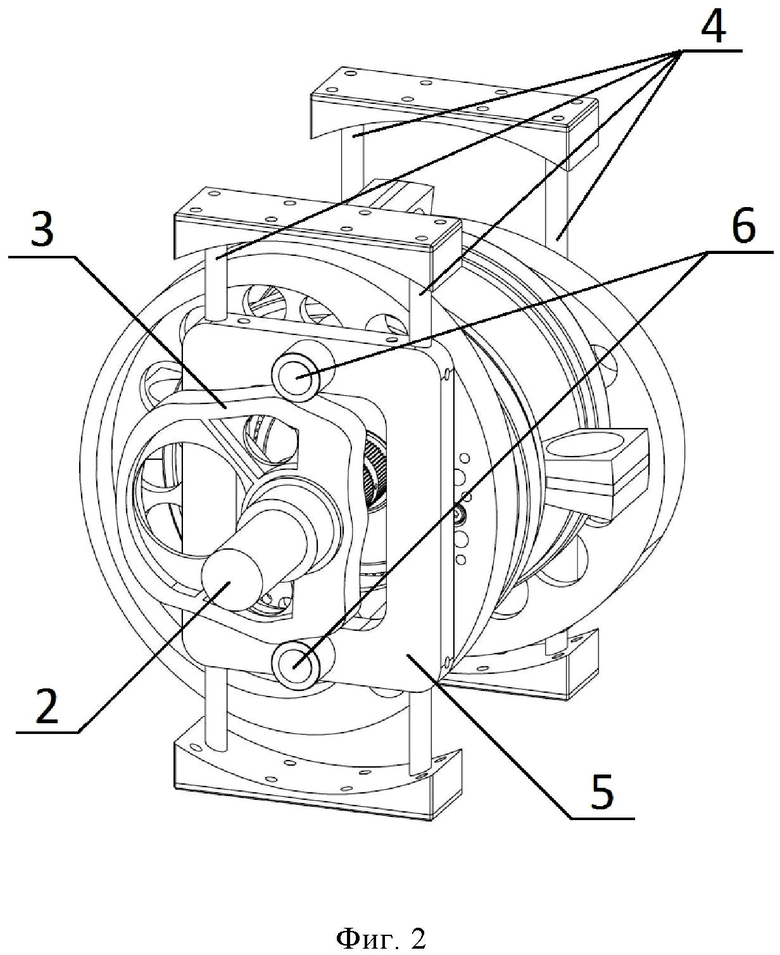
Механизм для преобразования движения, состоящий из корпуса, общего вала, симметричного дифференциального редуктора, двух колец дифференцированных потоков мощности, отличающийся наличием двух кулачков с внутренней рабочей поверхностью, установленных соосно общему валу, двух кулачков с наружной рабочей поверхностью, установленных соосно на общем валу, двух ползунов с пальцами, установленных на направляющих, закрепленных на корпусе, при этом профиль кулачков с внутренней рабочей поверхностью описывается зависимостью полярного радиуса от полярного угла и представляет собой эквидистанту, отстоящую на величину радиуса пальца наружу от производной первого порядка базовой замкнутой кривой, а профиль кулачков с наружной рабочей поверхностью описывается зависимостью полярного радиуса от полярного угла и представляет собой эквидистанту, отстоящую на величину радиуса пальца внутрь от производной второго порядка от базовой замкнутой кривой, при этом базовая замкнутая кривая описывается следующей формулой:
 ,
,
где ρ(α) - полярный радиус;
ρ(α)min - задаваемая величина минимального полярного радиуса;
Δρ(α)- задаваемый диапазон величин полярного радиуса;
α=0…360 - полярный угол;
αmax - задаваемая величина полярного угла для полярного радиуса с максимальным значением;
Δα - задаваемый диапазон полярного угла, при котором полярный радиус однократно изменяется в пределах между минимальным и максимальным значением.
| МЕХАНИЗМ ПРЕОБРАЗОВАНИЯ ДВИЖЕНИЯ | 2013 |
|
RU2531854C2 |
| МЕХАНИЗМ ДЛЯ ПРЕОБРАЗОВАНИЯ ДВИЖЕНИЯ | 2007 |
|
RU2374526C2 |
| US 6039672 A1, 21.03.2000. | |||

