Изобретение относится к устройствам механического перемещения объектов вдоль одной координаты. Оно может быть использовано, например, в сканирующем зондовом микроскопе (СЗМ) для сближения зонда и образца либо для перемещения образцов в установках электронного, ионного, зондового или иного воздействия.
Известен линейный инерционный шаговый двигатель, содержащий основание, на котором первыми концами закреплены три пьезотрубки, на вторых концах которых установлены сферические опоры, расположенные с возможностью взаимодействия посредством направляющих с подвижной платформой [1].
Недостаток этого устройства заключается в том, что из-за одностороннего расположения опор относительно платформы его нельзя использовать для вертикального перемещения объектов.
Известен также инерционный шаговый двигатель, содержащий основание, с закрепленным на нем посредством держателя пьезомодулем, соединенным с толкателем в виде направляющей, на которой установлена каретка с возможностью перемещения вдоль ее оси, а также блок управления, подключенный к пьезомодулю [2].
Это устройство выбрано в качестве прототипа предложенного решения.
Первый недостаток этого устройства связан с внутренними люфтами в цепочке: основание - пьезомодуль - направляющая, что может приводить к нестабильности перемещения каретки. Вторым недостатком является возможность разрушения пьезомодуля при ударных нагрузках.
Технический результат изобретения заключается в повышении стабильности работы двигателя и его надежности.
Указанный технический результат достигается тем, что в инерционный шаговый двигатель, включающий основание, с первым пьезомодулем, соединенным с держателем пьезомодуля, толкатель, направляющую, подвижную каретку и блок управления, введен прижим, установленный на основании, держатель пьезомодуля имеет П-образную форму и закреплен на прижиме, подвижная каретка установлена на направляющих на основании, а толкатель сопряжен с подвижной кареткой и закреплен на держателе пьезомодуля.
Существует вариант, в котором толкатель выполнен из твердого сплава.
Существуют варианты, в которых толкатель имеет форму пластины, либо цилиндра, либо шара.
Существует также вариант, в котором держатель пьезомодуля закреплен на прижиме с возможностью вращения относительно него.
Возможен вариант, в котором прижим содержит плоскую пружину и сопряжен с регулируемым упором.
Возможны варианты, в которых первый пьезомодуль имеет первую накладку, сопряженную с первым плечом П-образного держателя, либо первый пьезомодуль имеет вторую накладку, сопряженную со вторым плечом П-образного держателя.
Возможен также вариант, в котором подвижная каретка снабжена поликоровой или керамической пластиной, сопряженной с толкателем.
Существует также вариант, где в устройство введен второй пьезомодуль, расположенный между первым пьезомодулем и держателем пьезомодуля.
Инерционный шаговый двигатель содержит основание 1 (фиг.1), на котором посредством направляющих 2 установлена подвижная каретка 3 с поликоровой или пьезокерамической пластиной 4, закрепленной на ней посредством клея. Высота микронеровностей поверхности 5 пластины 4 может составлять величину порядка 1-5 мкм. На основании 1 закреплен П-образный держатель пьезомодуля 6 с первым пьезомодулем 7. Держатель 6 закреплен на прижиме 8 с возможностью подвижки относительно и, в частности, вращения в зазорах крепления между держателем 6 и винтами 9. Пьезомодуль 7 имеет первую накладку 10, сопряженную с первым плечом 11 держателя 6. Поджим первого плеча 11 к накладке 10 осуществляют винтом 12 и благодаря ее пружинным свойствам. Накладка 10 может иметь упорный элемент 13 с радиусом порядка 1 мм. Усилие поджима, обеспеченное винтом 12, может быть в диапазоне 10-100 кг.
Накладка 10, пьезомодуль 7, а также второе плечо 14 держателя 6 могут быть закреплены клеем.
Прижим 8 содержит крепежный элемент 15 с винтами 16, плоский упругий элемент 17, например, с размерами (10×5×0,5 мм), площадку 18, для закрепления держателя 6 и выступ 19 сопряженный с регулируемым упором 20, закрепленным на основании 1 (не показано). Упор 20 может содержать корпус 21, винт 22, пружину 23 и сферическую опору 24. На первом плече 11 держателя 6 закреплен, посредством винтов 25, твердосплавный толкатель 26, сопряженный закруглением 27 с пластиной 4. Толкатель 26 может быть выполнен в виде пластины, цилиндра или шара (не показано).
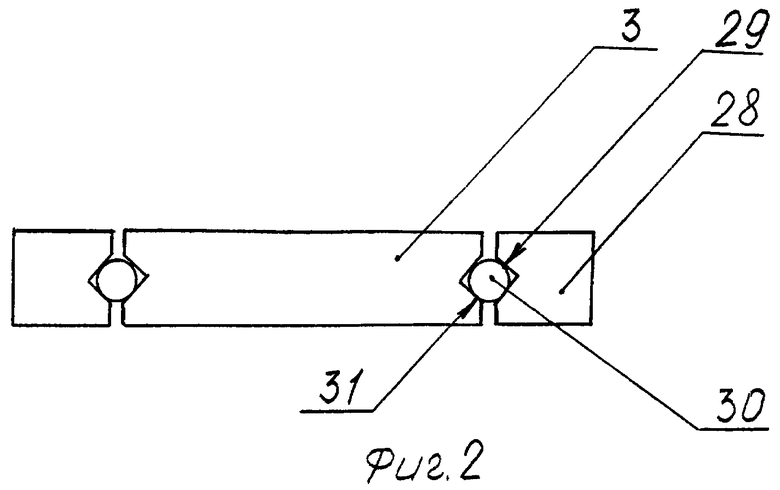
Один из вариантов направляющих 2 может содержать планки 28 (фиг.2), закрепленные на основании 1 винтами (не показано), с первыми V-образными опорами 29, сопряженными посредством шариков 30 (или роликов) со вторыми V-образными опорами 31 каретки 3.
На фиг.1 направляющие 2 с целью упрощения чертежей показаны условно.
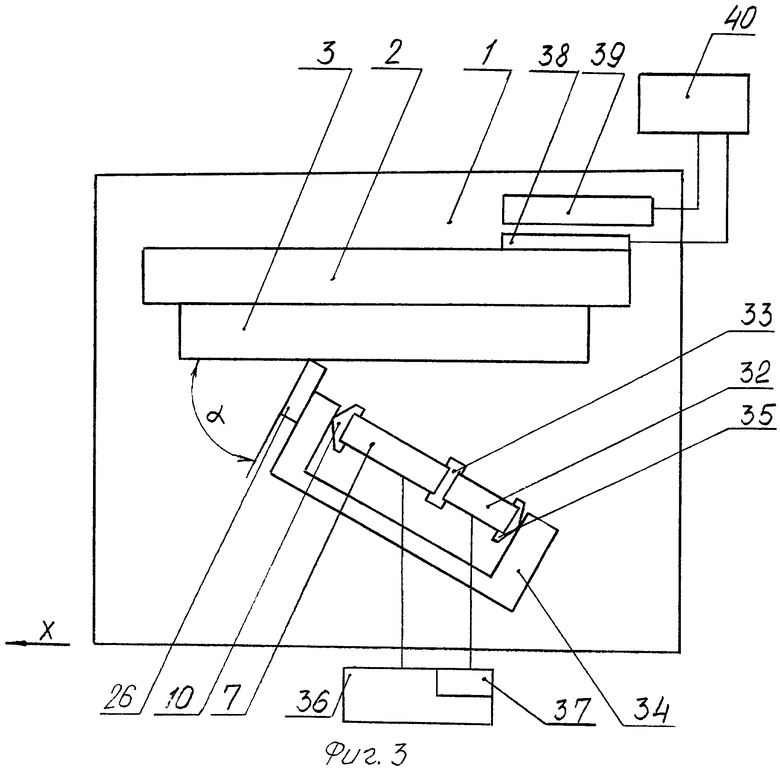
На фиг.3 представлен вариант (показан условно), в котором двигатель снабжен вторым пьезомодулем 32, соединенным через переходник 33 с первым пьезомодулем 7. При этом между вторым пьезомодулем 32 и держателем 34 может находиться вторая накладка 35.
Существует вариант, в котором первый пьезомодуль 7 может использоваться с первой 10 и второй 35 накладками без применения второго пьезомодуля 32 (не показано).
Первый 7 и второй 32 пьезомодули подключены к блоку управления 36, в который может входить модуль регулируемого напряжения 37 [3].
Устройство может иметь датчик перемещения, содержащий подвижную часть 38, закрепленную на каретке 3, и неподвижную часть 39, закрепленную на основании 1, соединенные с анализатором перемещения 40 [4, 5, 6].
Устройство работает следующим образом. Устанавливают держатель 6 таким образом, что дуга перемещения закругления 27 была симметрична пластине 4. В данной конструкции это соответствует углу α между толкателем 26 и пластиной 4 порядка 75°.
При этом скорости перемещения каретки 3 в ту и другую стороны будут равными, при высокой стабильности ее перемещения. Возможны изменения величины α, например если необходимо движение каретки 3 под углом к горизонту вверх в направлении X, то угол α может быть уменьшен, например, до 50°.
Если α<75°, то при движении по направлению X будет осуществляться небольшой прижим толкателя 26 к пластине 4. Тем самым облегчится перемещение вверх. При перемещении каретки 3 в обратном направлении недостаточное усилие между толкателем 26 и пластиной 4 будет компенсироваться весом каретки 3.
Регулируя упор 20, обеспечивают прижатие толкателя 26 к пластине 4 с усилием порядка 0,5-3 кг. На пьезомодуль 7 подают пилообразное напряжение, в результате чего толкатель 26 осуществляет дугообразное перемещение и инерционно перемещает каретку 3 по направляющим 2.
Следует заметить, что закругление 27 образуется само собой после 2-3-часовой работы двигателя в результате истирания твердого сплава по поликору или керамике.
Второй пьезомодуль 32 (фиг.3) можно включать в режиме плавной подачи напряжения. Благодаря этому будет производиться плавное перемещение каретки 3.
При использовании двух двигателей, установленных один на другом, можно осуществлять двухкоординатное перемещение образца.
Более подробно режим инерционного перемещения описан в [7, 8].
Введение в устройство прижима, выполнение держателя пьезомодуля П-образной формы и сопряжение толкателя с подвижной кареткой за счет оптимизации усилий позволяет повышать стабильность работы двигателя.
Использование в качестве толкателя цилиндра повышает долговечность его работы, а шарообразный толкатель проще в сопряжении с пластиной.
Подвижка держателя пьезомодуля относительно прижима, а значит, и относительно каретки позволяет выбирать режимы перемещения и расширяет функциональные возможности устройства.
Использование плоской пружины прижима позволяет регулировать усилие между толкателем и кареткой и повышает стабильность работы двигателя.
Использование первой и второй накладок уменьшает нефункциональные их перемещения относительно плеч держателя.
Перемещение каретки с использованием второго пьезомодуля расширяет функциональные возможности устройства.
ЛИТЕРАТУРА
1. Патент RU2152103, 1996.
2. Googl, Attocube systems AG Initial motor Driving controller ANC 150.
3. Г.Я.Мирский, «Электронные измерения». М., «Радио и связь», 439 с., 1986 г.
4. Г.Ф.Афанасьев, А.Н.Еремин. Повышение точности и разрешающей способности емкостных и индуктивных датчиков. Журнал «Датчики и системы», №6, с.17-19, 2003 г.
5. Д.И.Агейкин, Е.Н.Костина, Н.Н.Кузнецова, Датчики контроля и регулирования. М., 1965 г.
6. В.А.Долгов, А.В.Кедин. Электронные датчики для автоматических систем контроля. М., 1968 г.
7. Зондовая микроскопия для биологии и медицины. В.А.Быков и др. Сенсорные системы, т.12, №1, 1998 г., с.99-121.
8. Сканирующая туннельная и атомносиловая микроскопия в электрохимии поверхности. Данилов А.И. Успехи химии, 64 (8), 1995 г., с.818-833.
| название | год | авторы | номер документа |
|---|---|---|---|
| ИНЕРЦИОННЫЙ ДВИГАТЕЛЬ | 2005 |
|
RU2297072C1 |
| ИНЕРЦИОННЫЙ ШАГОВЫЙ ДВИГАТЕЛЬ | 2008 |
|
RU2461098C2 |
| КООРДИНАТНЫЙ СТОЛ | 2003 |
|
RU2255321C1 |
| ИНЕРЦИОННЫЙ ШАГОВЫЙ ДВИГАТЕЛЬ | 2006 |
|
RU2347300C2 |
| МНОГОФУНКЦИОНАЛЬНЫЙ СКАНИРУЮЩИЙ ЗОНДОВЫЙ МИКРОСКОП | 2010 |
|
RU2498321C2 |
| УСТРОЙСТВО МАНИПУЛИРОВАНИЯ | 2014 |
|
RU2591871C2 |
| СКАНИРУЮЩИЙ ЗОНДОВЫЙ МИКРОСКОП С УСТРОЙСТВОМ ДЛЯ ФУНКЦИОНИРОВАНИЯ МНОГОЗОНДОВОГО ДАТЧИКА | 2017 |
|
RU2695517C2 |
| КРИОГЕННЫЙ СКАНИРУЮЩИЙ ЗОНДОВЫЙ МИКРОСКОП | 2004 |
|
RU2271583C1 |
| УСТРОЙСТВО ПРЕЦИЗИОННОГО ПЕРЕМЕЩЕНИЯ | 2013 |
|
RU2537363C2 |
| СКАНИРУЮЩИЙ ЗОНДОВЫЙ МИКРОСКОП С НАНОТОМОМ | 2010 |
|
RU2427846C1 |
Изобретение относится к электротехнике, к устройствам механического перемещения объектов вдоль одной координаты и может быть использовано, например, в сканирующем зондовом микроскопе (СЗМ) для сближения зонда и образца либо для перемещения образцов в установках электронного, ионного, зондового или иного воздействия. Инерционный шаговый двигатель включает основание с первым пьезомодулем, соединенным с держателем пьезомодуля, толкатель, направляющую, подвижную каретку и блок управления. Прижим установлен на основании. Держатель пьезомодуля имеет П-образную форму и закреплен на прижиме. Подвижная каретка установлена на направляющих на основании. Толкатель сопряжен с подвижной кареткой, закреплен на держателе пьезомодуля и может быть выполнен из твердого сплава, иметь форму пластины, либо цилиндра, либо шара. Держатель пьезомодуля может быть закреплен на прижиме с возможностью вращения относительно него. Прижим может содержать плоскую пружину и быть сопряженным с регулируемым упором. Первый пьезомодуль может иметь первую накладку, сопряженную с первым плечом П-образного держателя, либо вторую накладку, сопряженную со вторым плечом П-образного держателя. Подвижная каретка может быть снабжена поликором или керамической пластиной, сопряженной с толкателем. Может быть введен второй пьезомодуль между первым пьезомодулем и держателем пьезомодуля. Технический результат состоит в повышении стабильности работы и надежности устройства. 10 з.п. ф-лы, 3 ил.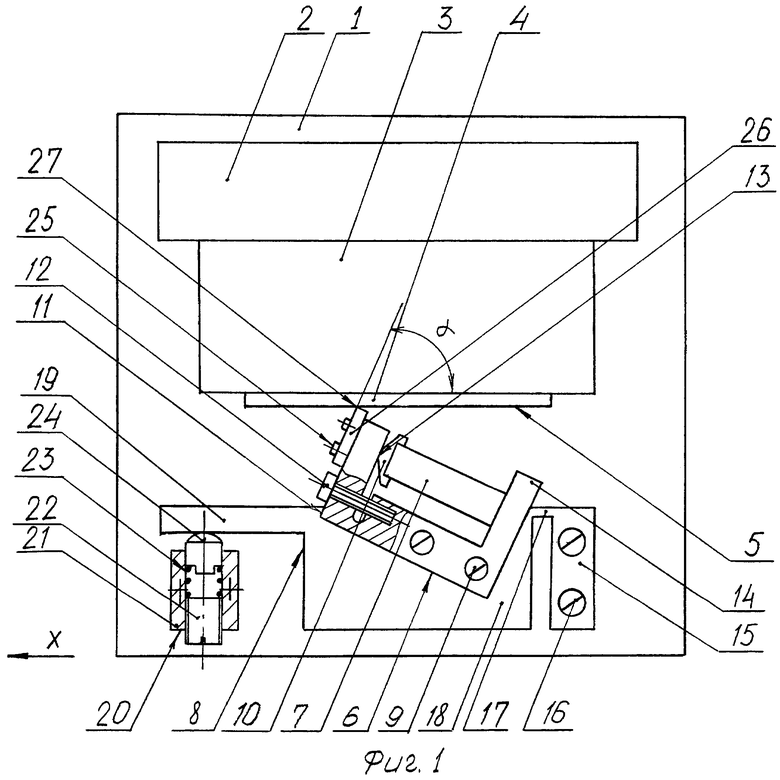
1. Инерционный шаговый двигатель, включающий основание с первым пьезомодулем, соединенным с держателем пьезомодуля, толкатель, направляющую, подвижную каретку и блок управления, отличающийся тем, что в него введен прижим, установленный на основании, держатель пьезомодуля имеет П-образную форму и закреплен на прижиме, подвижная каретка установлена на направляющих на основании, а толкатель сопряжен с подвижной кареткой и закреплен на держателе пьезомодуля.
2. Устройство по п.1, отличающееся тем, что толкатель выполнен из твердого сплава.
3. Устройство по п.1, отличающееся тем, что толкатель имеет форму пластины.
4. Устройство по п.1, отличающееся тем, что толкатель имеет форму цилиндра.
5. Устройство по п.1, отличающееся тем, что толкатель имеет форму шара.
6. Устройство по п.1, отличающееся тем, что держатель пьезомодуля закреплен на прижиме с возможностью вращения относительно него.
7. Устройство по п.1, отличающееся тем, что прижим содержит плоскую пружину и сопряжен с регулируемым упором.
8. Устройство по п.1, отличающееся тем, что первый пьезомодуль имеет первую накладку, сопряженную с первым плечом П-образного держателя.
9. Устройство по п.9, отличающееся тем, что первый пьезомодуль имеет вторую накладку, сопряженную со вторым плечом П-образного держателя.
10. Устройство по п.1, отличающееся тем, что подвижная каретка снабжена поликором или керамической пластиной, сопряженной с толкателем.
11. Устройство по п.1, отличающееся тем, что в него введен второй пьезомодуль, расположенный между первым пьезомодулем и держателем пьезомодуля.
| ИНЕРЦИОННЫЙ ШАГОВЫЙ ДВИГАТЕЛЬ | 2006 |
|
RU2347300C2 |
| ИНЕРЦИОННЫЙ ДВИГАТЕЛЬ | 2005 |
|
RU2297072C1 |
| SU 1820820 А1, 20.02.1998 | |||
| JP 11127584 А, 11.05.1999 | |||
| KR 100443639 В1, 29.07.2004. | |||

