(54) КАМЕРА ОБЪЕКТОВ ЭЛЕКТРОННО-ЭбНДОВОГО АНАЛИЗАТОРА
| название | год | авторы | номер документа |
|---|---|---|---|
| Камера образцов рентгеновского микроанализатора | 1980 |
|
SU873071A1 |
| Электронный микроскоп-анализатор | 1977 |
|
SU721868A1 |
| Электронный микроскоп-микроанализатор | 1975 |
|
SU568985A1 |
| КАМЕРА ОБРАЗЦОВ ДЛЯ ЭЛЕКТРОННО-ЗОНДОВОГО МИКРОАНАЛИЗАТОРА | 1973 |
|
SU397827A1 |
| Камера образцов для электроннозондового микроанализатора | 1977 |
|
SU633095A1 |
| Устройство для нанесения токопроводящих покрытий | 1980 |
|
SU874690A1 |
| Устройство для маркировки плоских изделий | 1990 |
|
SU1745565A1 |
| Устройство для упаковывания цилиндрических изделий | 1984 |
|
SU1303496A1 |
| Устройство для обработки кольцевого желоба переменного профиля | 1973 |
|
SU515628A1 |
| СПОСОБ РЕНТГЕНОФЛУОРЕСЦЕНТНОГО ОПРЕДЕЛЕНИЯ МИКРОЭЛЕМЕНТОВ С ПРЕДВАРИТЕЛЬНЫМ ИХ КОНЦЕНТРИРОВАНИЕМ ИЗ СВЕРХМАЛЫХ ПРОБ ВОДЫ И ВОДНЫХ РАСТВОРОВ | 2012 |
|
RU2484452C1 |
Изобретение относится к приборостроению, а точнее к рентгено-спектральным микроанализаторам и к растровым электронным микроскопам, а более конкретно к входящим в состав этих приборов камерам объектов, обеспечивающим необходимые перемещения объектов в процессе их исследования.
Известна камера объектов рентгеновского микроансшизатора, которая содержит столик, механизмы его плавного и быстрого перемещения, шкалы и механизм смены объектов 1.
Известна, также камера объектов, в которой для оптического наблюдения образца, подвергаемого электронно зондовому анализу, смонтирован барабан, поворачиваемый на 180 , несущий образец
Наиболее близкой к изобретению по технической сущности является камера объектов электронно-зондового анализатора, содержащая вакуумируемый корпус, подвижный столик и механизмы его привода, включающие юлицевые валики и зубчатые передачи L-3Q .
Недостатком протитипа является невозможность осуществить быстрое изменение режима-работы анализатора, вследствие того, что плита, приводимая в движение винтом и несущая столик, размещена вне вакуумного объема камеры объектов.
Цель изобретения - обеспечение оперативного изменения режима работ анализатора без изменения габаритов камеры объектов.
Для решения поставленной задачи внутри корпуса камеры объектов
10 электронно-зондового анализатора, содержащей вакуумируемый корпус, подвижный .столик и механизмы его привода, включающие шлицевые валики и зубчатые передачи, смонтирована
15 каретка, несущая столик и элементы (Механизмом его привода,с возможностью, поступательного перемещения по направляющим, которыми служат шлицевые валики, а механизм привода каретки
20 выполнен в виде «ривсшипа с подпружинейным, телескопически вьвдвигаиощимся упором, находящимся в сцеплении со стенками паза, выполненного в основании каретки.
25
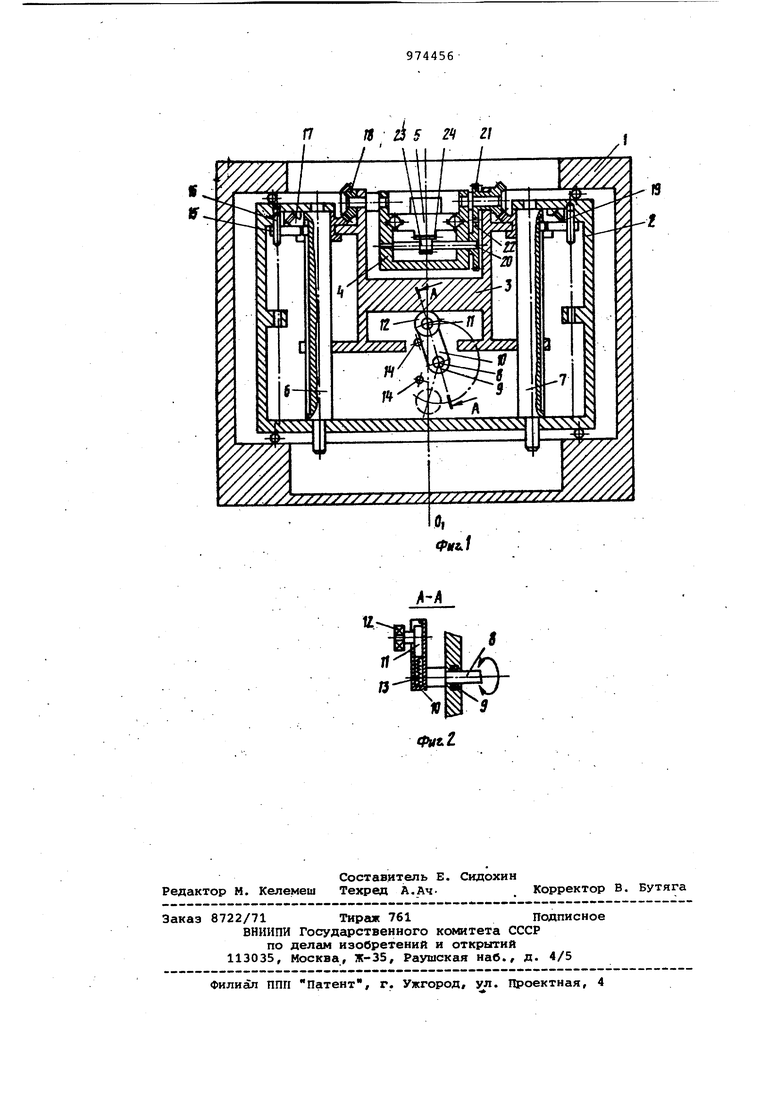
На фиг. 1 показана предлагаемая камера объектов, разрез; на фиг. 2 устройство кривошипа с подпружиненным упором (разрез А-А на фиг. 1).
Камера объектов содержит герме30тичный высоковакуумируемый корпус 1, в котором расположена peuvia 2 каретка 3, вилка 4, столик 5 для объекта 5, шлицевые валы б и 7 приводов наклона и перемещения столика, механизм перемещения каретки 3 вдоль оптической оси 00 , состояще из валика 8, проходящего в вакуумируемый корпус через уплотнение 9, закрепленного на валике 8 кривошипа 10 с телескопически выдвигакадимся упором 11, с роликом 12 и пружиной 13. Поворот кривошипа ограничивают упоры 14. Шлицевые валы являются одновременно направляющими для каретки 3, которая имеет упоры 15 и фиксаторы 16 . Передача движения от вала б к ви ке 4 обеспечивается зубчатыми колесами 17 и 18, а передача движения от вала 7 столику 5 для объекта обе печивается зубчатыми колесами 19-23 и зубчатой рейкой 24. Камера .работает следующим образом. Весь диапазон перемещения вдоль оптической оси (координата z) обеспечивается поворотом валика 8 на угол, немного больший половины оборота, при этом ролик 12, находящийся в пазу каретки 3, перебрасывает каретку со столиком объекта 5 из одного крайнего положения в другое (на чертеже верхнее) и обеспечивает фиксацию каретки 3 в этих двух поло жениях за счет упоров 15 и фиксаторов 16, взаимодействующих с соответ ствующими выступами и отверстиями на раме 2. Прижатие каретки 3 происходит за счет усиления пружины 13 кривошипа. Поворот вала 8 на угол нескол ко больший 180° обеспечивает переход кривошипа 10 через мертвую точ ку и надежную фиксацию его положения за сч.ет прижатия к упору 14 уси лием пружины 13. Каретка 3, увлекаемая роликом кривошипа, скользит по шлицевым вал б и 7, которые служат для нее направляющими. Одновременно валы 6 и 7 выполняют функции приводов наклона столика 5 .объекта и его перемещения по одной из координат X в собственной плоскости. Перемещение столика 5 объекта по второй координате Y в собственной плоскости обеспечивается движением рамы 2, привод перемещения которой не показан на чертеже. Предложенная камера объектов для рентгеновского микроанализатора с электронным зондом открывает новые возможности в рентгеновском микроанализе и -электронной микроскопии, поскольку значительно сокращается время исследований без изменения габаритов камеры и всего прибора. Формула изобретения Камера объектов электронно-зондового анализатора, содержащая вакуумируемый корпус, подвижный столик и механизмы его привода, включающие шлицевые валики и зубчатые передачи, от личающаяся тем, что, с целью обеспечения оперативного изменения режима работы анализатора без изменения габаритов камеры объектов, внутри корпуса смонтирована каретка, несущая столик и элементы механизмов его привода, с возможностью поступательного перемещения по направляющим, которыми служат шлицевые валики, а механизм привода каретки выполнен в виде кривошипа с подпружиненным, телескопически, выдвигающимся упором, находящимся в сцеплении со стенками паза, выполненного в основании каретки. Источники информации, принятые во внимание при экспертизе 1.Бирке Л.С. Рентгеновский микроанализ с помощью электронного зон да. М., Метсшлургия, 1966, с. 49502.Васичев Б.Н. Приборы рентгеноспектрального микроанализа. Бюллетень ЦНИИЧМ, 1963, 2 (454) с. 23. 3.ПатентЯпонии 49-33903, кл. Н 01 J 37/20, опублик. 1974 (прототип).
;:й
«
19
