Изобретение относится к нанотехнологии, а более конкретно к устройствам, обеспечивающим микроперемещения объекта в плоскости по двум координатам (X, Y). Например, устройство может быть использовано для перемещения образцов, держателей образцов и других элементов в сканирующей зондовой микроскопии.
Известен координатный стол, состоящий из основания, каретки и направляющих с роликами, расположенных вдоль координат X, Y [1].
Первый недостаток указанного устройства заключается в невозможности быстрого снятия каретки с платформы, что затрудняет замену образца. Второй недостаток связан со сложностью конструкции направляющих с роликами, что не позволяет создать компактное устройство.
Известен координатный стол, где платформа и каретка выполнены в виде одной детали, а направляющими являются тонкие перемычки в виде плоских пружин [2].
Недостатками указанного устройства являются невозможность снятия каретки с платформы и малый ход координатного стола.
Известен также координатный стол, содержащий платформу, на которой посредством четырех плоских пружин закреплена первая каретка с возможностью перемещения по координате X. Внутри первой каретки, также с помощью четырех плоских пружин, закреплена вторая каретка, с возможностью перемещения по координате Y, перпендикулярной координате X. Первая и вторая каретки расположены с возможностью взаимодействия с первым и вторым пьезоприводами, закрепленными на платформе координатного стола. Положения кареток зафиксированы первым и вторым пружинными упорами, также закрепленными на платформе [3].
Первым недостатком указанного устройства является малый ход кареток координатного стола, связанный с использованием пьезоприводов. Второй недостаток заключается в невозможности снятия кареток, например, для замены образца, что бывает необходимым при использовании координатного стола в сложных технологических устройствах, например, в сканирующих зондовых микроскопах (СЗМ).
Указанное устройство выбрано в качестве прототипа предложенного решения.
Задачей изобретения является создание координатного стола, позволяющего использовать его, например, в зондовой микроскопии для перемещения образцов в широком диапазоне по двум координатам, с возможностью быстрой замены образцов при жестком креплении их к каретке.
Технический результат изобретения заключается в увеличении диапазона координатного стола.
Указанный технический результат достигается в координатном столе, содержащем платформу, на которой установлена каретка с основанием, закреплены первый и второй приводы соответственно по первой и второй координатам, а также первый и второй пружинные упоры, расположенные напротив соответствующих приводов, сопряженные с кареткой, первый и второй приводы выполнены в виде первого и второго микровинтов, содержащих шаровые толкатели и сопряженных с первой и второй гайками, закрепленными на платформе, первый пружинный упор содержит скрепленные между собой первый и второй корпуса со сферической упорной поверхностью каждый, второй пружинный упор содержит третий корпус также со сферической упорной поверхностью, при этом первый и второй пружинные упоры установлены на платформе с возможностью прижима к каретке, каретка расположена на платформе с возможностью двухкоординатного перемещения по ней и с возможностью взаимодействия с шаровыми толкателями первого и второго приводов и со сферическими упорными поверхностями первого и второго пружинных упоров, места взаимодействия каретки с шаровыми толкателями первого и второго приводов и сферическими упорными поверхностями первого и второго пружинных упоров выполнены в виде гладких поверхностей, расположенных под углами, меньшими 90° к основанию каретки.
Существует вариант, в котором первый и второй корпуса первого пружинного упора выполнены в виде первого и второго рычагов, третий корпус второго пружинного упора выполнен в виде третьего рычага, при этом рычаги установлены с возможностью вращения относительно платформы, откидывания и освобождения каретки.
Существует также вариант, где в основании каретки закреплены три сферические опоры, на которые она установлена на платформе.
Существуют также варианты, в которых гладкие поверхности каретки образованы накладками из твердого материала, а углы α гладких поверхностей каретки в местах их взаимодействия со сферическими поверхностями первого и второго пружинных упоров меньше углов β в местах их взаимодействия с шаровыми толкателями первого и второго приводов.
В некоторых случаях, для особо прецизионного перемещения образцов, например, в зондовой микроскопии, целесообразно выполнение микровинтов и гаек первого и второго приводов с разнонаправленной резьбой.
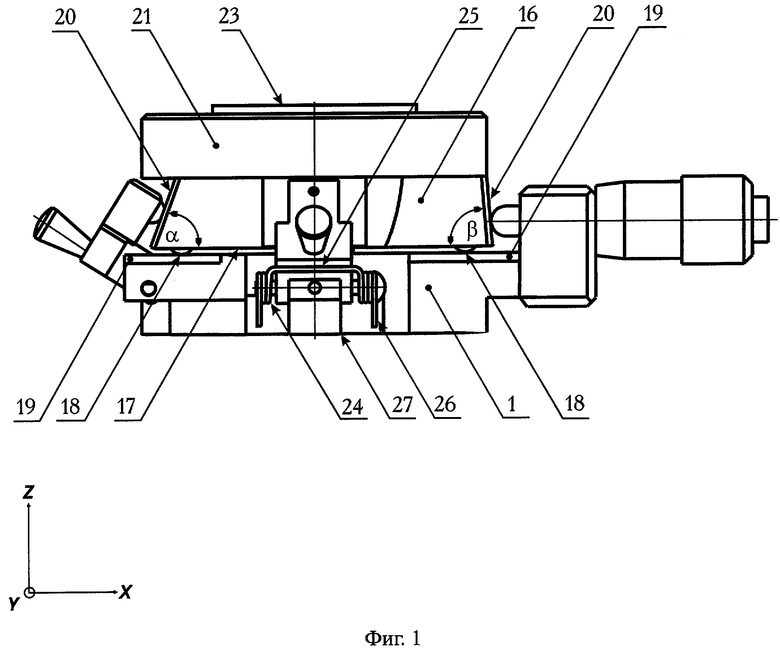
На фиг.1 и 2 изображены вид координатного стола сбоку и сверху. На фиг. 3 изображен вариант использования координатного стола в составе СЗМ.
Координатный стол содержит платформу 1, на которой закреплены первый 2 и второй 3 приводы, соответственно по первой (X) и второй (Y) координатам, перпендикулярным друг другу. Приводы 2 и 3 выполнены в виде первого 4 и второго 5 микровинтов, содержащих шаровые толкатели 6 и сопряженных с первой 7 и второй 8 гайками, закрепленными на платформе 1. Также на платформе 1 закреплены первый 9 и второй 10 пружинные упоры, расположенные напротив соответствующих приводов. Первый пружинный упор 9 содержит скрепленные между собой первый 11 и второй 12 корпуса со сферической упорной поверхностью 13 каждый. Корпуса 11 и 12 могут быть скреплены штангой 14, как это показано на фиг.2. Второй пружинный упор 10 содержит третий корпус 15 со сферической упорной поверхностью 13. Сферические упорные поверхности 13, а также шаровые толкатели 6 могут быть изготовлены из твердого сплава, например, ШХ15. В том случае, если нетехнологично изготавливать из твердого сплава целиком, микровинты и упоры целесообразно запрессовывать в них твердосплавные шарики. На фиг. 1, 2 изображен вариант исполнения корпусов 11, 12 и 15 пружинных упоров 9, 10 в виде рычагов с возможностью вращения относительно платформы и откидывания.
Кроме этого, на платформе 1 установлена каретка 16 с основанием 17, в котором, например, могут быть закреплены три опоры 18 виде запрессованных шариков. Платформа 1 в местах соприкосновения с опорами 18 содержит твердые гладкие поверхности, которые могут быть образованы вставками 19 из твердого материала, как это показано на фиг.1. Вставки могут быть изготовлены, например, из поликора или сплава ШХ15 и приклеены к платформе 1 эпоксидным клеем, приварены, припаяны и т.п. Следует заметить, что возможен вариант, в котором опоры 18 закреплены на платформе 1, а вставки 19 установлены на основании 17 каретки 16 (не показано). Возможен также вариант, в котором на каретке 16, изготовленной из твердого материала, в качестве опор 18 выполнены выступы. Каретка 16 расположена на платформе 1 с возможностью двукоординатного перемещения по ней и с возможностью взаимодействия с шаровыми толкателями 6 первого 2 и второго 3 приводов и со сферическими упорными поверхностями 13 первого 9 и второго 10 пружинных упоров. Места взаимодействия каретки 16 со сферическими упорными поверхностями 13 и шаровыми толкателями 6 выполнены в виде гладких поверхностей, расположенных под углами α и β, меньшими 90° к основанию 17 каретки 16. Причем углы α гладких поверхностей каретки в местах их взаимодействия со сферическими поверхностями 13 пружинных упоров 9 и 10 меньше углов β в местах взаимодействия гладких поверхностей каретки с шаровыми толкателями 6 приводов 2 и 3. На фиг.1, 2 изображен вариант, где гладкие поверхности каретки образованы накладками 20 из твердого материала, например, поликора или стали ШХ15. Накладки 20 могут быть приклеены к каретке 10 эпоксидным клеем, припаяны, приварены и т.п.
На каретку 16 установлен держатель образца 21 (на фиг.2 не показан), который может быть изготовлен из магнитного материала. При этом в каретку 16 могут быть вмонтированы, например, магниты для его закрепления (не показаны). Кроме этого держатель 21 может крепиться на каретке 16 с использованием винтов и резьбовых отверстий 22.
Образец 23 может быть закреплен на держателе 21 с использованием винтов, плоских пружин, клея и т.п. (не показано).
На фиг.1, 2 изображен вариант, в котором первый 9 и второй 10 пружинные упоры сопряжены с витыми пружинами 24, которые расположены также с возможностью взаимодействия с платформой 1. При этом полки 25 взаимодействуют с корпусами 11, 12, 15, а концы 26 - с платформой 1. В этом случае возможно также использование плоских или витых пружин другой формы (не показаны).
Существует также вариант исполнения координатного стола, в котором микровинты 4, 5 и гайки 7, 8 первого и второго приводов 2, 3 выполнены с однонаправленной или разнонаправленной резьбами.
При использовании координатного стола 27 в составе СЗМ 28 координатный стол 27 устанавливают на плиту 29. СЗМ 28 при этом содержит пьезосканер 30 с зондом 31. Подробно СЗМ и принципы его работы, см. в [4, 5].
Устройство работает следующим образом. Держатель образца 21 с образцом 23 устанавливают на каретку 16. После этого, используя приводы 2 и 3, перемещают каретку 16 в нужное положение. При использовании координатного стола 27 в составе СЗМ 28 (фиг.3) для установки образца 23 требуется снять каретку 16 с координатного стола 27. Для этого пружинные упоры 9 и 10 отводят от каретки 16 и вынимают ее из измерительного комплекса. После замены образца 23 каретку 16 вновь устанавливают на координатный стол 27, для чего отводят пружинные упоры 9 и 10, ставят каретку 16 с образцом 23 на платформу 1 и отпускают пружинные упоры 9 и 10. Пружинные упоры 9 и 10 прижимают каретку 16 к шаровым толкателям 6 микровинтов 4 и 5. С помощью микровинтов 4 и 5 каретку 16 с закрепленным на ней образцом 23 перемещают по координатам Х и Y. При перемещении каретки 16 по координате X первый пружинный упор 9 вращается относительно платформы, а сферическая упорная поверхность 13 второго пружинного упора 10 и шаровой толкатель 6 второго микровинта 5 проскальзывают вдоль граней каретки 16. При перемещении каретки 16 по координате Y второй пружинный упор 10 вращается относительно платформы, а сферическая упорная поверхность 13 первого пружинного упора 9 и шаровой толкатель 6 первого микровинта 4 проскальзывает вдоль грани каретки.
При использовании микровинтов 4, 5 с разнонаправленной резьбой перемещение по направлениям +Х, +Y и -X, -Y (направления А) будет всегда предпочтительнее перпендикулярным перемещениям. Это происходит из-за того, что в этих направлениях совпадают направления перемещения накладок 20 и шаровых толкателей 6. То есть грубую установку каретки 16 целесообразно осуществлять по направлениям +Х, -Y и -X, +Y (направления В), а точную - по направлениям А.
Выполнение первого и второго приводов в виде первого и второго микровинтов, содержащих шаровые толкатели и сопряженных с первой и второй гайками, закрепленными на платформе, и первого пружинного упора в виде скрепленных между собой первым и вторым корпусами со сферической упорной поверхностью каждый, а также второго пружинного упора в виде третьего корпуса со сферической упорной поверхностью, при том, что первый и второй пружинные упоры установлены на платформе с возможностью прижима к каретке, увеличивает диапазон перемещения каретки координатного стола.
Выполнение первого и второго корпусов первого пружинного упора скрепленными между собой повышает точность двухкоординатного плоскопараллельного перемещения каретки на всем диапазоне.
Расположение каретки на платформе с возможностью двукоординатного перемещения по ней и с возможностью взаимодействия с шаровыми толкателями первого и второго приводов и со сферическими упорными поверхностями первого и второго пружинных упоров увеличивает диапазон перемещения каретки координатного стола. Это связано с тем, что в качестве направляющих используют гладкие плоские поверхности, а не упругие направляющие, как у прототипа.
Выполнение мест взаимодействия каретки с шаровыми толкателями первого и второго приводов и сферическими упорными поверхностями первого и второго пружинных упоров в виде гладких поверхностей, расположенных под углами меньшими 90° к основанию каретки, обеспечивает прижим каретки к платформе и уменьшает нефункциональные перемещения каретки по координате Z на всем диапазоне ее перемещения.
Выполнение первого и второго корпусов первого пружинного упора в виде первого и второго рычагов и третьего корпуса второго пружинного упора в виде третьего рычага, и установка рычагов с возможностью вращения относительно платформы, откидывания и освобождения каретки упрощает эксплуатацию координатного стола.
Закрепление трех сферических опор в основание каретки для установки ее на платформу, повышает точность плоскопараллельного перемещения каретки за счет уменьшения влияния сил трения.
Выполнение гладких поверхностей каретки в виде накладок из твердого материала позволяет снизить требования к материалу изготовления каретки, что уменьшает трудоемкость и стоимость при ее изготовлении, и увеличивает срок эксплуатации, т.к. при повреждении гладких поверхностей потребуется только заменить накладки, а не саму каретку.
Выполнение углов α гладких поверхностей каретки в местах их взаимодействия со сферическими поверхностями первого и второго пружинных упоров меньшими углов β в местах их взаимодействия с шаровыми толкателями первого и второго приводов предотвращает вертикальное смещение каретки при перемещении ее микровинтами. Это связано с тем, что сферические упорные поверхности перемещаются по накладкам и формируют вертикальные силы отрыва каретки от платформы. Для их компенсации целесообразно уменьшать угол α, увеличивая вертикальные составляющие сил прижима.
Выполнение микровинтов и гаек первого и второго приводов с однонаправленной резьбой, например стандартной правой, обеспечивает удобство эксплуатации устройства.
Выполнение микровинтов и гаек первого и второго приводов с разнонаправленной резьбой позволяет осуществлять более точное перемещение каретки при использовании координатного стола в СЗМ и повышает долговечность гладких поверхностей каретки.
Литература
1. X-Y stage and charged particle beam exposure apparatus. Patent USA 5,561,299. Patent USA 5,051,594/
2. Fine positioning device, as for the stage of a scanning tunneling microscope.
3. Dual quad flexure scanner. Patent USA 5,360,974-прототип.
4. Зондовая микроскопия для биологии и медицины. В.А.Быков и др., Сенсорные системы, т. 12, № 1, 1998 г., с.99-121.
5. Сканирующая туннельная и атомно-силовая микроскопия в электрохимии поверхности. А.И.Данилов, Успехи химии 64 (8), 1995 г., с.818-833.
| название | год | авторы | номер документа |
|---|---|---|---|
| КООРДИНАТНЫЙ СТОЛ | 2004 |
|
RU2254640C1 |
| СКАНИРУЮЩИЙ ЗОНДОВЫЙ МИКРОСКОП ДЛЯ ИССЛЕДОВАНИЯ КРУПНОГАБАРИТНЫХ ОБЪЕКТОВ | 2010 |
|
RU2515731C2 |
| УСТРОЙСТВО ПОДВИЖКИ ОБРАЗЦА | 2005 |
|
RU2377620C2 |
| СКАНИРУЮЩИЙ ЗОНДОВЫЙ МИКРОСКОП | 1999 |
|
RU2159454C1 |
| КООРДИНАТНЫЙ СТОЛ | 2015 |
|
RU2618073C1 |
| МНОГОФУНКЦИОНАЛЬНЫЙ СКАНИРУЮЩИЙ ЗОНДОВЫЙ МИКРОСКОП | 2010 |
|
RU2498321C2 |
| ИНЕРЦИОННЫЙ ШАГОВЫЙ ДВИГАТЕЛЬ | 2008 |
|
RU2465712C2 |
| СКАНИРУЮЩИЙ ЗОНДОВЫЙ МИКРОСКОП С НАНОТОМОМ | 2010 |
|
RU2427846C1 |
| ОПТИЧЕСКИЙ ЗОНД НА ОСНОВЕ КВАРЦЕВОГО РЕЗОНАТОРА ДЛЯ СКАНИРУЮЩЕГО ЗОНДОВОГО МИКРОСКОПА | 2002 |
|
RU2221287C2 |
| СКАНИРУЮЩИЙ ЗОНДОВЫЙ МИКРОСКОП, СОВМЕЩЕННЫЙ С УСТРОЙСТВОМ МОДИФИКАЦИИ ПОВЕРХНОСТИ ОБЪЕКТА | 2012 |
|
RU2572522C2 |


Изобретение относится к устройствам для микроперемещения объекта в плоскости по двум координатам, в частности для перемещения образцов, держателей образцов и других элементов в сканирующей зондовой микроскопии. Координатный стол содержит платформу, на которой установлена каретка с основанием, закреплены первый и второй приводы соответственно по первой и второй координатам, а также первый и второй пружинные упоры, расположенные напротив соответствующих приводов, при этом приводы и пружинные упоры сопряжены с кареткой. Первый и второй приводы выполнены в виде первого и второго микровинтов, содержащих шаровые толкатели, и сопряженных с первой и второй гайками, закрепленными на платформе. Первый пружинный упор содержит скрепленные между собой первый и второй корпуса со сферической упорной поверхностью каждый. Второй пружинный упор содержит третий корпус, также со сферической упорной поверхностью. Первый и второй пружинные упоры установлены на платформе с возможностью прижима к каретке. Каретка расположена на платформе с возможностью двукоординатного перемещения по ней и с возможностью взаимодействия с шаровыми толкателями первого и второго приводов и со сферическими упорными поверхностями первого и второго пружинных упоров. Места взаимодействия каретки с шаровыми толкателями первого и второго приводов и сферическими упорными поверхностями первого и второго пружинных упоров выполнены в виде гладких поверхностей, расположенных под углами меньшими 90° к основанию каретки. Изобретение обеспечивает перемещение образцов в широком диапазоне по двум координатам с возможностью быстрой замены образцов при жестком креплении их к каретке. 6 з.п. ф-лы, 3 ил.
| US 5360974 A, 01.11.1994 | |||
| ПОЗИЦИОНИРУЮЩЕЕ УСТРОЙСТВО | 1994 |
|
RU2080631C1 |
| US 4559717 A, 24.12.1985 | |||
| Столик для установки образца в рентгеновской камере | 1973 |
|
SU478233A1 |
| US 4520570 A, 04.06.1985. | |||

