Изобретение относится к электромеханическим приводам и может найти широкое применение в различных устройствах, где рабочее звено совершает секторное качание, например, в радиолокационных антеннах с механическим сканированием зеркала.
Известен электромеханический привод, содержащий двигатель с редуктором, и связанную с ним винтовую пару, гайка которой через шарнир связана с зеркалом, а винт через шарнир связан с основанием, (см. авт. св-во N 1198294, F 16 H 25/20). Наличие дополнительных кинематических звеньев в виде шарниров усложняет конструкцию и увеличивает люфты, что отрицательно сказывается на работе следящего привода для р/л антенн.
Наиболее близким к предлагаемому изобретению является устройство по патенту N 2031283, МПК F 16 H 25/20, содержащее приводной двигатель, связанное с ним посредством зубчатой передачи ведущее звено в виде гайки, взаимодействующее с гайкой промежуточное звено в виде кольца с винтовой нарезкой и ведомый зубчатый элемент, взаимодействующий с промежуточным звеном. Наличие зубчатой передачи между гайкой и приводным двигателем, промежуточного и ведомого звена, дополнительной винтовой нарезки на промежуточном звене, жестко установленных на осях роликов, входящих в ведомое звено, усложняет конструкцию, уменьшает точность и жесткость кинематической цепи привода в целом.
Задачей изобретения является получение минимальных массогабаритных параметров, высокой точности и жесткости привода и упрощение его конструкции.
Это достигается тем, что электромеханический привод содержит основание, рабочее звено (антенну), электродвигатель, датчик положения, винтовую пару в виде втулки с роликами и изогнутого ходового винта, при этом статоры двигателя и датчика жестко установлены в корпусе привода, роторы двигателя и датчика жестко укреплены на втулке, связанной с основанием посредством подшипника, а внутри втулки установлены ролики попарно под углом 90o друг к другу, взаимодействующие с изогнутым по радиусу ходовым винтом в виде сектора, причем центр радиуса ходового винта совпадает с центром вращения рабочего звена (антенны), общая ось каждой пары роликов (водило) подвижно размещена во втулке посредством резьбовых втулок с шагом, равным шагу ходового винта в пределах одного витка резьбы, между торцем втулки и осью каждой пары роликов установлена пружина (например, тарельчатая).
Электромеханический привод изображен на фиг. 1 и фиг. 2.
На фиг. 1 изображен общий вид привода.
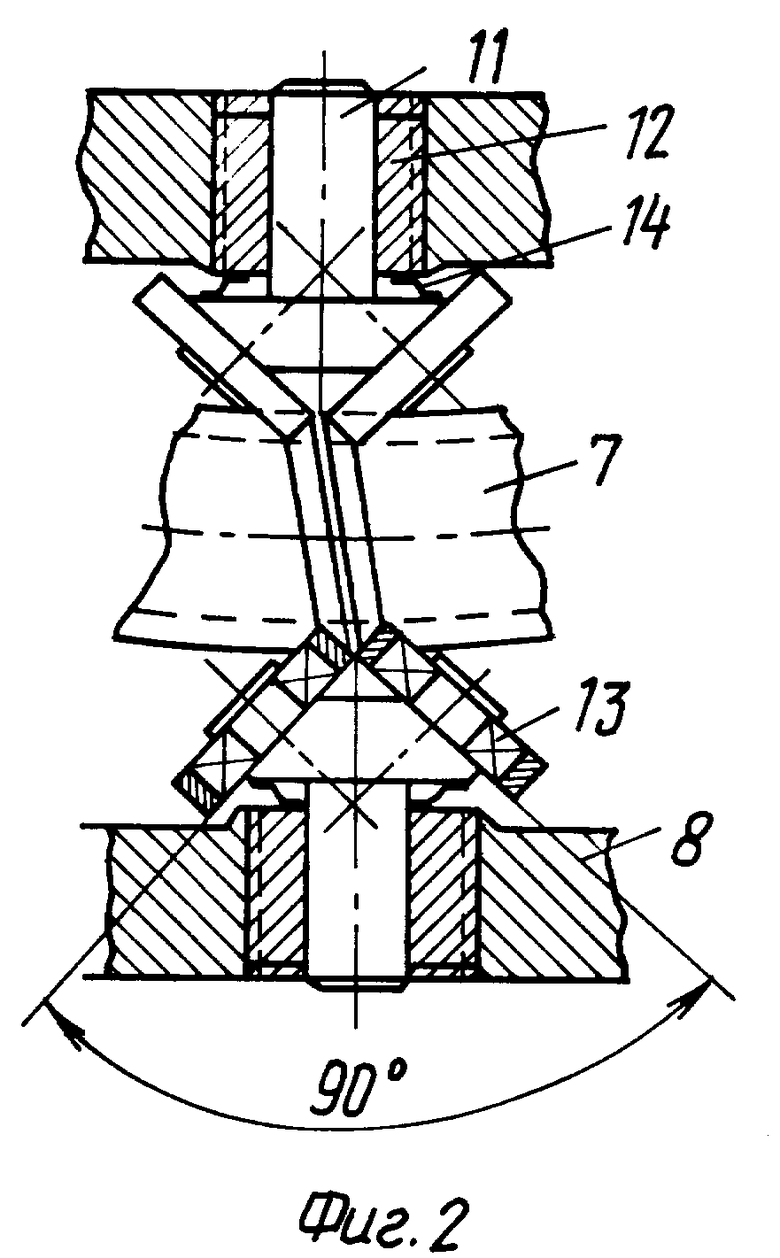
На фиг.2 дано расположение роликов во втулке.
Привод состоит из статора 1 двигателя, ротора 2 двигателя, статора 3 датчика, ротора 4 датчика, рабочего звена (антенны) 5, основания 6, изогнутого по радиусу ходового винта 7 (выполненного в виде сектора), втулки 8, подшипника 9, корпуса 10, общей оси каждой пары роликов (водило) 11, резьбовых втулок 12, установленных попарно под углом 90o, роликов 13, пружины 14.
Корпус 10 привода установлен на основании 6. Основание 6 подвижно, связано с рабочим звеном (антенны) 5. На рабочем звене 5 жестко установлен изогнутый по радиусу ходовой винт 7.
В корпусе 10 привода укреплены статоры 1 и 3 двигателя и датчика и наружное кольцо подшипника 9. На внутреннем кольце подшипника 9 установлена втулка 8. На втулке 8 укреплены роторы 2 и 4 двигателя датчика. Внутри втулки 8 посредством осей 11 установлены ролики 13. Ролики 13 установлены попарно под углом 90o друг к другу так, что каждая пара роликов 13 имеет общую ось (водило) 11 и рабочие поверхности роликов 13 контактируют с профилем нарезки ходового винта 7. Водило 11 посредством резьбовой втулки 12 подвижно установлено во втулке 8. Между торцем резьбовой втулки 12 и торцем водила 11 установлена пружина 14. Резьбовые втулки 12 размещены во втулке 8 с шагом, равным шагу ходового винта 7 в пределах одного витка резьбы.
Число пар роликов может колебаться от одной до "n" пар в пределах одного витка и выбирается исходя из механических нагрузок, возникающих при работе привода. Рекомендуется нечетное число пар. Для правильной работы привода необходимо, чтобы общая ось пары роликов 11, равноудаленной от остальных, совпадала с центром изогнутого по радиусу ходового винта 7, а центр радиуса ходового винта 7 должен совпадать с осью вращения антенны 5. Например, если число пар роликов 3, то совпадение осей должно быть у средней пары роликов 13. Термин "совпадение" в данном случае подразумевает то, что ось вращения антенны и общая ось пары роликов находятся в одной плоскости.
Электромеханический привод работает следующим образом. При подаче напряжения на статорную обмотку 1 двигателя начинает вращаться ротор 2. Т.к. ротор 2 жестко укреплен на втулке 8, которая установлена в подшипнике 9, то начинает вращаться втулка 8 и ротор 4 датчика. Установленные попарно ролики 13 катятся по винтовой нарезке ходового винта 7, сообщая ему движение вокруг оси рабочего звена 5 с заданной редукцией в ту или другую сторону. Зазоры в системе ходовой винт - ролики выбираются резьбовой втулкой 12, а компенсация геометрических и технологических погрешностей осуществляется пружиной 14. Сокращение промежуточных звеньев привода по сравнению с прототипом, применение в нем втулок 12 и пружин 14 значительно повышает ресурс работы привода и обеспечивает безлюфтовую работу его на протяжении всего срока службы.
Изготовленный на предприятии макет подтвердил правильность выбранного технического решения. В макете использован двигатель ДБМ70-0,16-3-2 и датчик ВТ6-12-0,4-0,16. Роторы этих электромашин выполнены в виде колец. Изогнутый по радиусу Rв ходовой винт в виде сектора имеет шаг резьбы t = 5 мм при Rв= 60 мм.
Число пар роликов равно 5.
Данное изобретение предполагается использовать в различных разработках предприятия при конструировании радиолокационных антенн с механическим сканированием зеркала.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЭЛЕКТРОМЕХАНИЧЕСКИЙ ПРИВОД | 2018 |
|
RU2672154C1 |
| Безредукторный электрический привод запорной арматуры | 2016 |
|
RU2659703C2 |
| ЭЛЕКТРОМАГНИТНЫЙ ПЕРЕКЛЮЧАТЕЛЬ | 2005 |
|
RU2307419C2 |
| ЭЛЕКТРОМЕХАНИЧЕСКИЙ ПРИВОД | 2018 |
|
RU2672150C1 |
| ВИНТОВОЙ ГЕРОТОРНЫЙ ДВИГАТЕЛЬ С ТУРБИННЫМ АКТИВАТОРОМ | 2002 |
|
RU2203380C1 |
| АКТИВНАЯ ФАЗИРОВАННАЯ АНТЕННАЯ РЕШЕТКА С ИЗМЕНЯЕМОЙ КОНФИГУРАЦИЕЙ | 2004 |
|
RU2277739C1 |
| РАДИОЛОКАЦИОННАЯ СИСТЕМА | 1997 |
|
RU2151407C1 |
| Электромеханический привод поступательного действия | 2022 |
|
RU2786248C1 |
| ДАТЧИК УГЛОВОГО ПОЛОЖЕНИЯ ВАЛА | 2000 |
|
RU2180096C2 |
| ВОЛНОВОДНЫЙ ПЕРЕКЛЮЧАТЕЛЬ | 2011 |
|
RU2456718C1 |
Изобретение относится к электромеханическим приводам и предназначено для использования в устройствах, где рабочее звено, например поворотная радиолокационная антенна, совершает секторное качание. Имеются установленный на основании корпус привода рабочего звена, электродвигатель и датчик положения, роторы которых выполнены в виде колец, винтовая пара, включающая в себя втулку с роликами и изогнутый ходовой винт. Статоры электродвигателя и датчика положения жестко установлены в корпусе привода, а их роторы жестко укреплены на втулке, связанной с основанием посредством подшипника. Ролики установлены внутри втулки попарно под углом 90o друг к другу, а ходовой винт изогнут по радиусу в виде сектора. Центр радиуса ходового винта совпадает с центром вращения рабочего звена, общие оси пар роликов подвижно размещены во втулке посредством резьбовых втулок. Привод при минимальных массогабаритных параметрах характеризуется повышенной точностью и жесткостью. 2 ил.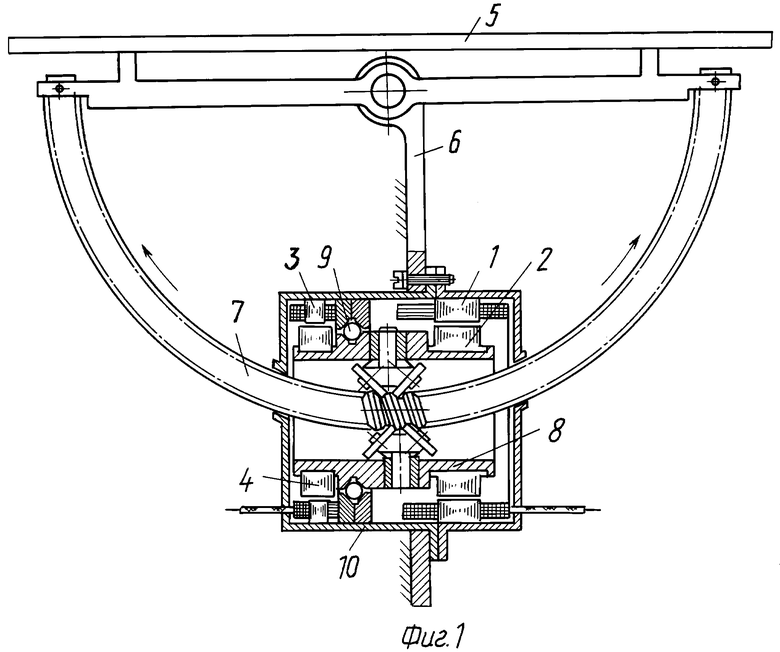
Электромеханический привод, например, для поворотных антенн, содержащий основание, на котором установлен корпус привода рабочего звена, электродвигатель и датчик положения, роторы которых выполнены в виде колец, винтовую пару, включающую в себя втулку с роликами и изогнутый ходовой винт, отличающийся тем, что статоры электродвигателя и датчика положения жестко установлены в корпусе привода, а их роторы жестко укреплены на втулке, связанной с основанием посредством подшипника, ролики установлены внутри втулки попарно под углом 90o друг к другу с возможностью взаимодействия с изогнутым по радиусу ходовым винтом в виде сектора, причем центр радиуса ходового винта совпадает с центром вращения рабочего звена, общие оси пар роликов подвижно размещены во втулке посредством резьбовых втулок с шагом, равным шагу ходового винта в пределах одного витка резьбы, между торцом втулки и осью каждой пары роликов установлена пружина.
| ВИНТОВАЯ ПЕРЕДАЧА | 1992 |
|
RU2031283C1 |
| МОРСКАЯ РАДИОЛОКАЦИОННАЯ СТАНЦИЯ | 1990 |
|
RU2018859C1 |
| ПРИВОДНАЯ СИСТЕМА АЗИМУТАЛЬНОГО ВРАЩЕНИЯ АНТЕННЫ | 1997 |
|
RU2110872C1 |

