Изобретение относится к области радиолокации и предназначено для использования в береговых, аэродромных и корабельных радиолокационных станциях для обнаружения наземных и надводных объектов,
Известны радиолокационные станции - береговые, корабельные или аэродромные РЛС, предназначенные для обзора земной и водной поверхности и обнаружения расположенных на ней объектов, осуществляющие обзор путем секторного качания луча антенны в азимутальной плоскости. Зона обзора такой РЛС представляет собой сектор с радиусом, соответствующим дальности действия РЛС. Однако их применение для обнаружения отраженных сигналов от малоразмерных целей (σц<5M2) в условиях отражений от подстилающей поверхности оказывается не эффективным. Ниже приводится доказательство этого утверждения. Основной характеристикой, определяющей возможность применения РЛС для обнаружения или распознавания наземной и морской цели на фоне подстилающей поверхности, является разрешающая способность. Обобщенной характеристикой разрешающей способности может служить площадь разрешаемого элемента на местности, в пределах которого цели или элементы не разрешаются. При этом диаграмма направленности антенны по азимуту определяет линейную разрешающую способность по азимуту dL. А ширина спектра зондирующего сигнала определяет линейную разрешающую способность по дальности dz. При обнаружении наземных и морских объектов на фоне подстилающей поверхности характеристики обнаружения зависят от соотношения сигнал/шум+фон
где Pс - отраженная мощность сигнала от объекта;
Pф - мощность собственных шумов приемного канала;
Pa - мощность отражений от подстилающей поверхность.
При низком уровне собственных шумов приемника по сравнению с фоновой составляющей сигнала Pш<Pф отношение сигнал/шум+фон будет определяться
где σц - эффективная площадь отражений от объекта,
σф - эффективная площадь отражений подстилающей поверхности,
Учитывая, что эффективная площадь отражений подстилающей поверхности определяется
σф= d1•d2•σo, [1a]
где σo - удельное ЭПР подстилающей поверхности, поэтому и характеристики обнаружения объектов на фоне подступающей поверхности будут существенно зависеть от разрешающей способности РЛС.
Из формул 1 и 1а следует, что даже при малом коэффициенте отражений σo обнаружение малоразмерных объектов на фоне моря может обеспечиваться только при очень высокой разрешающей способности. Так для обнаружения объекта (лодка в море) с σц= 2 м2 на фоне моря 3-4 балла (σo= 5•10-3) с вероятностью правильного обнаружения Pпо= 0,7, при вероятности ложной тревоги Pлт=10-6, разрешаемый элемент поверхности не должен превышать 6,6 м2, что соответствует линейному разрешению по азимуту и дальности 2,5 метра. Для получения такого линейного разрешения по азимуту на дальности D=5 км диаграмма направленности антенной системы в азимутальной плоскости не должна превышать
Для обеспечения такого углового разрешения размер антенны D в азимутальной плоскости при длине волны λ = 8 мм должен быть
что существенно превышает размер антенного раскрыва.
Вышеизложенное показывает, что существующие наземные и корабельные РЛС не способны обнаруживать отраженные сигналы от малоразмерных целей в условиях отражения от подстилающей поверхности даже средней интенсивности.
Для улучшения характеристик обнаружение целей разработки таких РЛС в последние годы велись в направлении увеличения апертуры антенны и применения длины волны в миллиметровом диапазоне волн, однако как показано выше, для выполнения условий обнаружения малоразмерных целей требуется применение антенны с размером раскрыва, практически не реализуемым.
В настоящее время для обзора российских морских границ используются РЛС, подобные применяющимся на морских кораблях. Поэтому в качестве аналога таких РЛС можно привести речную навигационную станцию KCLVINHUQHES, R, SR 1000 и электрон-Сперри МК-3217р, предназначенную для обеспечения безопасности плавания по рекам и другим водоемах, состоящую из антенны, передатчика, приемника, индикатора и блока питания. Эти станции имеют круговой обзор по азимуту. Отличительной особенностью является большой раскрыв рупорной антенны L = 2,1 - 2,4 метра при ширине диаграммы направленности в азимуте 0,95 - 1o и разрешения по дальности Δr = 7,5 метров.
В качестве аналога также предлагается корабельная станция фирмы Racul Marine Electronics RACAL-DECCA RM209ВТ, RM2070ВТ.
Эта РЛС состоит из антенны, передатчика, приемника, индикатора и блока питания. Для получения высокой разрешающей способности этой станции используются антенны с различным размером раскрыва в азимутальной плоскости: L = 1,2; 1,8; 2,7 и 3,6 метра с применением длин λ = 3 см и 10 см.
В качестве прототипа может быть использована судовая РЛС типа " ДОН" (См. " Судовые радиолокационные станции и их применение", том 3, стр. 19. Справочное руководство. Авторы В.Я Аверьянов и др. под редакцией д.т.н. Ракова В.И. Судостроение г. Ленинград 1970 г.) РЛС " Дон" состоит из следующих блоков (см. фиг.1)
1. Антенна (Прибор А).
2. Передатчик (Прибор П).
3. Приемник (Прибор П).
4. Синхронизатор (Прибор И).
5. Индикатор (Прибор И).
Радиолокационная станция " Дон" имеет традиционное .построение импульсной станции с магнетронным передатчиком, работающим на длине излучаемой волны 3,2 см. РЛС работает с частотой повторения (Fn 1600-3200) Гц, определяющей однозначную дальность. Высокая разрешающая способность по дальности обеспечивается излучением коротких импульсов τц= (0,1 - 1) мксек. Учитывая направленность предложенного изобретения рассмотрим получение в прототипе разрешения в азимутальной плоскости. Относительно высокая разрешающая способность в азимутальной плоскости ( Δα = 1,1o) в прототипе обеспечивается также традиционным способом т. е. за счет большого размера реальной апертуры антенны (L = 1,8 м). При этом основание антенны устанавливается неподвижно, а для обеспечения необходимой зоны обзора в азимутальной плоскости антенна вращается с определенной скоростью вокруг оси в центре ее основания.
Как следует из вышеизложенного, приведенные аналоги и прототип, несмотря на большие размеры антенной системы, не обеспечивают требуемой угловой разрешающей способности для обнаружения малоразмерных объектов (σц<5м2) на фоне подстилающей поверхности.
Задача предлагаемого изобретения заключается в получении высокого углового разрешения по азимуту в наземной, аэродромной и корабельной РЛС. Поставленная задача достигается тем, что установленной на подвижное основание антенне придается движение в горизонтальной плоскости, при этом ее электрическая ось устанавливается перпендикулярно (или под углом) к направлению движения и производится когерентное суммирование отраженных сигналов в каждом элементе дальности.
Для когерентной обработки сигналов вводят: задающий генератор, процессор сигналов, процессор данных, датчик углов и измеритель скорости антенны.
Траектория движения антенны может иметь различную конфигурацию. Однако для получения лучших характеристик углового разрешения необходимо, чтобы линейный участок траектории был бы максимальным.
Во время движения антенна реальной диаграммой направленности излучает когерентные импульсы передатчика и после отражения от объекта их принимает. При движении антенны, путем обработки и когерентного суммирования принимаемых отраженных от объекта сигналов, создается искусственный (синтезированный) раскрыв антенны, существенно превышающий раскрыв реальной антенны.
Возможность когерентного суммирования принятых отраженных сигналов при движении обеспечивается путем компенсации фазовых измерений принимаемых сигналов доплеровской частоты. Компенсация фазовых изменений проводится на основе измерения скорости движения антенны в течение всего времени движения антенны по заданной траектории. В результате когерентного суммирования формируется выходной сигнал, соответствующий сигналу, принимаемому синтезированной диаграммой направленности шириной θc, существенно меньшей ширины диаграммы направленности реальной антенны θp.
Роль апертуры антенны в этом случае играет длина траектории движения антенны РЛС.
Время когерентной обработки Тс определяется скоростью движения антенны и длиной траектории.
На фиг. 2 представлено в координатах Х-У движение антенной системы. В данном примере антенна движется по координате Х.
Если ограничиться квадратичным членом разложения в ряд Тейлора, текущее расстояние будет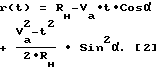
Фаза траекторного сигнала при такой аппроксимации изменяется по закону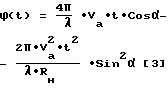
Доплеровская частота траекторного сигнала
Второй член определяет ширину спектра Δfд доплеровских частот траекторного сигнала. Средняя частота сигнала равна нулю, когда антенна движется перпендикулярно линии визирования на объект.
Максимальное время накопления сигнала t=Tсmax обеспечивается тогда, когда вся диаграмма направленности антенны при своем движении проходит объект обнаружения т.е.

В этом случае ширина спектра доплеровских частот траекторного сигнала будет
где dа - размер реальной антенны.
Однако в предлагаемом изобретении при синтезировании апертуры из-за ограничений реального размера участка движения антенны может быть использована только часть траекторного сигнала. Время синтезирования Tс выбирается исходя из требуемой угловой разрешающей способности по азимуту Δα
При этом ширина спектра доплеровских частот обрабатываемой части траекторного сигнала будет составлять
Из формулы 5 следует, что угловая разрешающая способность соответствует
При движении антенны перпендикулярно линии визирования на объект разрешающая способность Δα будет
Из формулы по аналогии с антенной техникой размер синтезированной апертуры L=Uа•Tс.
Таким образом разрешающая способность РЛС будет определяться физической длиной L участка движения антенны. Однако следует отметить (см. формулу 6), что разрешающая способность при синтезированной апертуре в два раза лучше, чем в реальной антенне.
Реальность получения необходимого размера такой синтезированной апертуры для получения требуемого разрешения в наземных условиях можно подтвердить следующим примером.
Расчеты показывают, что для обнаружения малоразмерных объектов σц≤ 5 м2 на фоне отражений от поверхности, требующих линейного азимутального разрешения на дальности RH = 9000 м - Δτ = 8м, угловое разрешение должно быть Δα = 3' .
Для получения такого углового разрешения физически длина участка движения антенны L (синтезированная апертура) должна составлять L = 20 м и реальна в наземных условиях. Как следует из формулы [3]
для реализации когерентного накопления необходимо при движении компенсировать изменения фазы траекторного сигнала в зависимости от скорости угла и дальности, обеспечивая когерентность при накоплении.
Получение высокого азимутального разрешения в предлагаемой радиолокационной системе обеспечивается с помощью следующей процедуры обработки. Излученный движущейся антенной импульсный зондирующий сигнал отражается от объектов и поверхности и с некоторой задержкой (определяемой расстоянием) принимается этой же антенной и поступает на вход приемника. После преобразования на промежуточную частоту радиосигнал поступает на два синхронных фазовых детектора, опорные сигналы которых сдвинуты относительно друг друга на π/2. С выхода фазовых детекторов поступают мнимая и действительная составляющие комплексной огибающей сигнала. Так как обработку сигнала производят цифровым процессором с помощью аналого-цифрового преобразователя, огибающую сигнала стробируют по времени (дальности) и амплитуду преобразовывают в цифровой вид.
Обработка сигнала проводится методом гармонического спектрального анализа. В этом случае сигналы радиолокационного изображения одной стробированной полоски дальности на выходе системы обработки в аналоговой форме могут быть описаны
где Sвх(τ•αi) - комплексный сигнал на входе системы обработки, отраженный от объекта, расположенного под углом αi относительно линии визирования объекта
τ - текущее время на интервале накопления на интервале движения антенны
A(τ,αi) - амплитуда сигнала;
ϕ(τi;αi) - фаза сигнала;
h·(τ) - опорная функция, комплексно сопряженная сигналом, отраженным от объекта;
H(τ) - весовая функция, определяющая заданный уровень боковых лепестков;
Uar - составляющая скорость движения антенны в направлении на объект Var= Va•Cosαi;
Aar - составляющая ускорения движения антенны в направлении на объект
λ - длина излучаемой волны
Для представления этих зависимостей при цифровой обработке сигнала следует произвести переход к дискретной форме.
При этом производится замена τ на К•Т, ω на 2π•l/NT, а интегрирование заменяется суммированием по К,
где К - номер отсчета входных сигналов и опорной функции на интервале накопления.
l - номер отсчета выходного сигнала (спектра)
Т - период дискретизации входных сигналов и опорной функции
N - количество отсчетов на интервале накопления.
N = TH/T
С учетом этих изменений сигнал радиолокационного изображения на выходе цифровой системы обработки будет
B соответствии с вышеизложенным признаки и преимущества предлагаемой paдиoлoкaциoнной системы приводятся ниже в описании предложенного варианта предполагаемого изобретения.
На фиг. 1-5 представлены чертежи, поясняющие описание предложенной РЛС. На фиг. 1 приведена блок-схема традиционной радиолокационной системы прототипа.
На фиг. 2 приведен чертеж, поясняющий наличие доплеровских и фазовых изменений при движении антенны, дающих возможность синтезировать апертуру антенны.
На фиг. 3 представлена блок-схема предложенной РЛС, отвечающая формуле изобретения.
На фиг. 4 на двух листах (фиг. 4-1 и фиг. 4-2) представлена развернутая блок-схема предложенной на фиг. 3 РЛС, в которой подробно изложен процесс формирования и обработки сигналов в каждом из блоков и в РЛС в целом.
Соединение связей между листами обозначены буквами от n до l.
На фиг. 5 приведен чертеж возможного варианта реализации движения антенны по направляющим.
На фиг. 3 представлена блок-схема предлагаемой радиолокационной системы, где:
- блок 1 - антенна
- блок 2 - передатчик
- блок 3 - приемник
- блок 4 - синтезатор частот
- блок 5 - индикатор
- блок 6 - циркулятор
- блок 7 - датчик углов
- блок 8 - измеритель скорости
- блок 9 - процессор сигналов
- блок 10 - процессор данных
- блок 11 - задающий генератор
В предложенной РЛС антенна установлена на подвижное основание и антенне задается поступательно-возвратное движение по направляющим, в горизонтальной плоскости, при этом ее электрическая ось установлена перпендикулярно (или под углом) к направлению движения. Конфигурация траектории движения антенны может быть различной (в том числе и круговой).
Однако для простоты обработки сигналов предпочтительной является конфигурация траектории движения, при которой обеспечивается наибольшая длина линейного участка.
На фиг. 5 представлен вариант движения антенны по направляющим и размещение антенны на подвижном основании. Движение основания по направляющим осуществляется с помощью двигателя. Конструкция антенны, подвижное основание, построение направляющих определяется конкретными требованиями и условиями применения РЛС. Выполнение такой конструкции проводится традиционными инженерными методами с применением известных материалов и конструкций, в том числе и стандартных.
На фиг. 4(1-2) представлена развернутая структурная схема радиолокационной системы в соответствии с настоящим предложением (фиг. 3).
В радиолокационную систему входит:
антенна - 1
передатчик - 2
приемник - 3
синтезатор частот - 4
индикатор - 5
циркулятор - 6
датчик углов - 7
измеритель скорости - 8
процессор сигналов - 9
процессор данных -10
задающий генератор - 11
усилитель мощности - 12
модулятор - 13
СВЧ-приемник - 14
усилитель промежуточной частоты - 15
фазовый детектор -16
фазовый детектор -17
АЦП - 18
АЦП - 19
память - 20
память - 21
умножитель - 22
умножитель - 23
умножитель - 24
умножитель - 25
узел разности - 26
узел суммы - 27
процессор БПФ - 28
вычислитель - 29
узел модуля Cos α - 30
умножитель - 31
умножитель - 32
умножитель - 33
умножитель - 34
умножитель - 35
узел суммы - 36
узел суммы - 37
узел Sin Δϕ - 38
узел Cos Δϕ - 39
память - 40
память - 41
умножитель - 42
умножитель - 43
умножитель - 44
узел Sin2 αi - 45
задатчик данных - 46
РЛС работает следующим образом:
В процессе движения антенны (1) усилитель мощности (12) усиливает поступающие на него из модулятора (13) высокочастотные импульсы и через циркулятор (6) передает в антенну (1). Антенной (1) эти импульсы излучаются в пространство и распространяются в направлении выбранной области.
Когерентность сигнала определяется задающим генератором (11). Модулятор (13) осуществляет модуляцию высокочастотного, сигнала f и формирует импульсы, подаваемые в усилитель мощности, имеющие заданную длительность (τ) и период повторения (Тп), определяемый однозначной дальностью.
Высокочастотный сигнал (f) формируется синтезатором частоты (4), разработанным известными методами проектирования и изготовленным с использованием известной элементной базы.
От задающего кварцевого генератора (II) сигнал с входной частотой fr поступает в синтезатор частот (4), умножается до более высокой частоты f и используется в качестве несущей частоты радиолокационного сигнала, излучаемого антенной. Также в процессе движения, отраженные сигналы от объектов и поверхности принимаются антенной и через циркулятор (6) поступают в СВЧ-приемник (14). В СВЧ-приемнике (14) эти сигналы в смесителе приемника смешиваются с сигналом синтезатора fс, в результате чего образуются сигналы промежуточной частоты fоп. Сигналы промежуточной частоты в усилителе промежуточной частоты УПЧ (15) усиливаются и поступают на фазовые детекторы (16) и (17), на которые от синтезатора поступает сигнал с частотой fпр, равной промежуточной частоте fпр. Причем, на один из фазовых детекторов сигнал синтезатора fпр поступает со сдвигом на π/2.
За счет движения антенны (1) на выходах фазовых детекторов образуются синфазный "1" и квадратурный "Q" сигналы доплеровской частоты. Далее, оба сигнала "1" и "Q"с помощью аналого-цифрового преобразователя (18) и (19), управляемого с помощью синхросигнала fc'a, преобразуются в цифровую форму. С выходов АЦП (18) и (19) массив сигналов двух квадратур, поступающих в процессор (9), синхронизируемый сигналом fсп из блока 4 накапливается в памяти (20) и (21) для каждого элемента дальности и каждого периода повторения. Одновременно в процессе движения антенны, для компенсации фазовых изменений, в процессоре данных (10) синхронизируемым сигналом fпα, из блока (4), формируется опорная функция, комплексно сопряженная с сигналом, отраженным от объекта, в соответствии с формулой [7]. Для этого формируется линейный член изменения фазы Δϕл опорной функции и ее квадратичный член Δϕкв.
Для формирования линейного члена с датчика угла (7) на узел cosα поступает значение угла αi и с него поступает на умножитель (31). На этот же умножитель (31) с измерителя скорости поступает значение скорости Ua. Произведение Vacosαi поступает на умножитель (32), где умножается на величину a = 4π•τи/λ, поступающую из задатчика данных (46). Произведение (4π•τи/λ)•VaCosα поступает на умножитель (34), где умножается на номер элемента дальности ε, поступающего из задатчика данных (46). В результате на выходе умножителя (34) формируется конкретное изменение фазы для каждого элемента дальности в периоде повторения Tп- (4π•τи•ε/λ)•Va•Cosαi
В умножителе (33) и (35) формируется изменение фазы от периода к периоду "Тп" для всех элементов дальности. Для этого из умножителя (31) значение Va•Cosαi последовательно в умножителях (33) и (35) умножается сначала на коэффициент b = (4π/λ)•Tп, а затем на коэффициент "К", равный номеру периода "Тп", в результате чего на выходе умножителя (35) будет (4π•k•Tп/λ)•VaCosα.
В узле суммы (36) формируется линейный член изменения фазы
для каждого элемента дальности для "К" - ого периода повторения.
Для формирования квадратичного изменения фазы Δϕкв опорной функции используются умножители (42), (43), (44), a также узел Sin2αi. B умножителе (42) значение скорости Va с измерителя скорости (8) вначале умножается само на себя, а затем умножается на (КТn)2, поступающий из задатчика данных, (46) затем величина Va 2(КТn)2 поступает на умножитель (43), куда поступают коэффициент C = 2π/λ и коэффициент 1/R из задатчика данных (46). Затем эта величина поступает в умножитель (44), где умножается на значение Sin2α , поступающее из узла Sin2αi(45).
С выхода умножителя (44) квадратичный член изменения фазы
поступает на узел суммы, где суммируется с линейным членом каждого элемента дальности в каждом периоде Tп. С выхода узла суммы изменение фазы опорной функции Δϕ = Δϕλ+Δϕкв для каждого элемента дальности ε в каждом периоде повторения Tп поступают в узлы SinΔϕ и CosΔϕ и накапливаются в памяти для каждого элемента дальности и каждого периода повторения.
По окончании движения антенны по траектории поступающие из памяти 20, 21 отсчеты сигнала каждого элемента дальности каждого периода в умножителях 22, 23, 24 и 25 перемножаются с отсчетами для каждого элемента дальности и периода повторения опорной функции, поступающими из памяти (40) и (41). С выходов узлов разности (26) и суммы (27) сигналы двух квадратур подаются в процессор БПФ, где подвергаются гармоническому анализу по алгоритму быстрого преобразования Фурье.
Результатом преобразования сигналов из временной области в частотную являются азимутальные отсчеты двух квадратур радиолокационной информации в каждом элементе дальности. Затем отсчеты двух квадратур поступают на узел 29, где из них формируется модуль. Далее сигналы поступают в систему индикации 5.
Техническая эффективность
Технический эффект предлагаемого изобретения заключается в повышении углового азимутального разрешения радиолокационной системы.
В зависимости от реализуемого размера траектории движения антенны повышение углового разрешения предполагаемой РЛС по сравнению с прототипом будет
где θd,θ - угловое разрешение РЛС,
L - линейный размер,
Kобуж - коэффициент обужения реальной диаграммы.
В зависимости от условий применения коэффициент Kобуж может быть более 10.
| название | год | авторы | номер документа |
|---|---|---|---|
| ВЕРТОЛЕТНАЯ РАДИОЛОКАЦИОННАЯ СИСТЕМА | 1997 |
|
RU2147136C1 |
| РАДИОЛОКАЦИОННАЯ СИСТЕМА | 2000 |
|
RU2194288C2 |
| РАДИОЛОКАЦИОННАЯ СИСТЕМА ДЛЯ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2013 |
|
RU2531255C1 |
| СПОСОБ КОМПЕНСАЦИИ ФАЗОВЫХ НАБЕГОВ СИГНАЛА В БОРТОВОЙ РАДИОЛОКАЦИОННОЙ СИСТЕМЕ И БОРТОВАЯ РАДИОЛОКАЦИОННАЯ СИСТЕМА С СИНТЕЗИРОВАННОЙ АПЕРТУРОЙ АНТЕННЫ ДЛЯ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2004 |
|
RU2271019C1 |
| СПОСОБ УГЛОВОГО РАЗРЕШЕНИЯ ЦЕЛИ РАДИОЛОКАЦИОННОЙ СТАНЦИЕЙ ПРИ ОБЗОРЕ И РАДИОЛОКАЦИОННАЯ СТАНЦИЯ БОКОВОГО ОБЗОРА | 2000 |
|
RU2182714C2 |
| РАДИОЛОКАЦИОННАЯ СТАНЦИЯ ДЛЯ ВЕРТОЛЕТА | 2001 |
|
RU2206903C2 |
| РАДИОЛОКАЦИОННАЯ СТАНЦИЯ С СИНТЕЗИРОВАНИЕМ АПЕРТУРЫ И КВАЗИНЕПРЕРЫВНЫМ ИЗЛУЧЕНИЕМ | 2012 |
|
RU2510685C2 |
| СПОСОБ ОБУЖЕНИЯ ПРИЕМНОЙ ДИАГРАММЫ НАПРАВЛЕННОСТИ АНТЕННЫ И МНОГОФУНКЦИОНАЛЬНАЯ РАДИОЛОКАЦИОННАЯ СТАНЦИЯ ДЛЯ ЛЕТАТЕЛЬНЫХ АППАРАТОВ, РЕАЛИЗУЮЩАЯ ЭТОТ СПОСОБ | 2014 |
|
RU2599932C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ НАЗЕМНЫХ ПРЕПЯТСТВИЙ ПРИ ПОЛЕТЕ ЛЕТАТЕЛЬНЫХ АППАРАТОВ НА МАЛОЙ ВЫСОТЕ | 1997 |
|
RU2128846C1 |
| СПОСОБ РАЗРЕШЕНИЯ ЦЕЛЕЙ ПО ДАЛЬНОСТИ РАДИОЛОКАЦИОННОЙ СТАНЦИЕЙ И ИМПУЛЬСНАЯ РАДИОЛОКАЦИОННАЯ СТАНЦИЯ СО СЖАТИЕМ ИМПУЛЬСОВ И ВОССТАНОВЛЕНИЕМ СИГНАЛОВ | 2004 |
|
RU2296345C2 |





Предлагаемая радиолокационная система предназначена для использования в качестве береговых, аэродромных и корабельных РЛС для обзора земной и водной поверхности и обнаружения на ней объектов, в том числе и малоразмерных. Технический результат заключается в получении высокого углового разрешения в азимутальной плоскости. Поставленная задача достигается тем, что установленной на подвижное основание антенне придается движение в горизонтальной плоскости, при этом ее электрическая ось устанавливается перпендикулярно или под углом к направлению движения. При движении антенны проводится когерентное суммирование отраженных сигналов в каждом элементе дальности. В результате когерентного суммирования создается искусственный (синтезированный) раскрыв антенны, существенно превышающий раскрыв реальной антенны, обеспечивающий высокое угловое разрешение. Возможность когерентного суммирования принятых сигналов обеспечивается путем компенсации фазовых изменений принимаемого сигнала. 5 ил.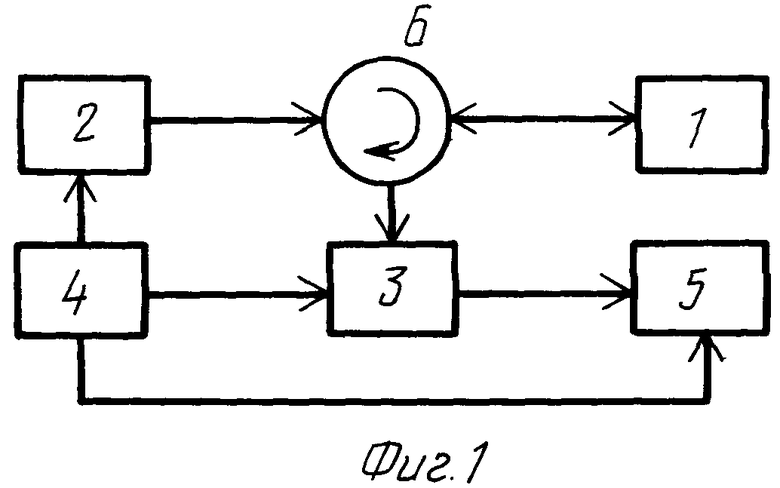
Радиолокационная система, состоящая из антенны, передатчика, циркулятора, приемника, синтезатора частот и индикатора, при этом вход-выход антенны через циркулятор соединен с входом приемника и выходом передатчика, первый выход синтезатора частот соединен с первым входом приемника, отличающаяся тем, что антенна установлена на подвижное основание, перемещаемое в горизонтальной плоскости, с установленной перпендикулярно или под углом к направлению движения электрической осью антенны, а также тем, что в систему введены процессор сигналов, процессор данных, измеритель скорости, датчик углов и задающий генератор, от которого сигнал с входной частотой fr поступает в синтезатор частот, умножается до более высокой частоты и используется в качестве несущей частоты радиолокационного сигнала, излучаемого антенной, при этом второй выход синтезатора частот соединен с вторым входом приемника, третий выход - с третьим входом приемника, четвертый выход - с первым входом процессора сигналов, второй вход которого соединен с выходом приемника, третий вход - с выходом процессора данных, а выход - с входом индикатора, второй вход процессора данных соединен с выходом измерителя скорости, а третий вход - с выходом датчика углов, при этом в процессоре данных, синхронизируемом сигналом fпα из синтезатора частот, формируется опорная функция, комплексно сопряженная с сигналом, отраженным от объекта.
| Аверьянов В.Я | |||
| и др | |||
| Судовые радиолокационные станции и их применение | |||
| Справочное руководство/Под ред.д.т.н | |||
| В.И | |||
| Ракова Судостроение | |||
| Кинематографический аппарат | 1923 |
|
SU1970A1 |
| US 4829306 A, 09.05.1989 | |||
| US 4377811 A, 22.03.1983 | |||
| СПОСОБ ПОЛУЧЕНИЯ ПОЛИПЕПТИДОВ В БЕСКЛЕТОЧНОЙ СИСТЕМЕ (ВАРИАНТЫ) И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1998 |
|
RU2148649C1 |
| СРЕДСТВА ДЛЯ МЫТЬЯ ТЕЛА НА ОСНОВЕ ГИПОХЛОРИТА НАТРИЯ | 2012 |
|
RU2635195C2 |
| Пюпитр для работы на пишущих машинах | 1922 |
|
SU86A1 |

