Изобретение относится к вычислительной технике и может быть использовано для фильтрации результатов измерений.
Известен дискретный фильтр Калмана [1], содержащий последовательно соединенные вычитатель, первый вход которого является входом фильтра, умножитель и сумматор, к второму входу которого подключены вход первого матричного умножителя, и через второй матричный умножитель - выход блока элементов задержки, при этом выход первого матричного умножителя подсоединен к второму входу вычитателя, а выход сумматора - к входу блока элементов задержки.
Недостаток известного фильтра Калмана - низкая пропускная способность и высокая чувствительность к неточностям статистического описания каналов фильтрации измерений.
Наиболее близким к изобретению является модифицированный фильтр Калмана [2], содержащий последовательно соединенные вычитатель, перемножитель, сумматор, первый регистр памяти и блок элементов задержки, последовательно соединенные первый матричный умножитель, второй регистр памяти, первый блок элементов И и усреднитель, второй матричный умножитель, вход которого подключен к выходу блока элементов задержки, генератор одиночного импульса, генератор тактовых импульсов, счетчик импульсов, элемент ИЛИ, второй блок элементов И, блок памяти, при этом выход генератора одиночного импульса соединен с входом запуска генератора тактовых импульсов и с первым входом элемента ИЛИ, выход генератора тактовых импульсов соединен с входами считывания первого и второго регистров памяти и счетным входом счeтчика импульсов, вход обнуления которого подключен к выходу элемента ИЛИ, выход счетчика импульсов соединен с вторым входом элемента ИЛИ, входом считывания усреднителя, вторым входом первого блока элементов И и с первым входом второго блока элементов И, второй вход которого подсоединен к выходу первого регистра памяти, выход усреднителя соединен с первым входом вычитателя, выход второго матричного умножителя подсоединен к второму входу сумматора и к входу первого матричного умножителя, второй вход вычитателя и первый вход блока памяти являются соответственно первым и вторым входами модифицированного фильтра Калмана, выход первого регистра памяти и выход второго блока элементов И являются соответственно первым и вторым выходами модифицированного фильтра Калмана.
В таком фильтре повышается пропускная способность каналов фильтрации и снижаются требования к виду закона распределения шумов за счет предварительного усреднения измерений. Однако при этом снижается точность получаемых оценок из-за применения неоптимальных по минимуму дисперсии весовых коэффициентов фильтра.
3аявляемое изобретение направлено на повышение точности фильтрации в системах связи, радиолокации, навигации и управления, когда темп поступления измерений превышает темп получения оценок состояния, а также при многоуровневой обработке сигналов.
В модифицированный фильтр Калмана [2], содержащий последовательно соединенные вычитатель, перемножитель, сумматор, первый регистр памяти и блок элементов задержки, последовательно соединенные первый матричный умножитель, второй регистр памяти, первый блок элементов И и усреднитель, второй матричный умножитель, вход которого подключен к выходу блока элементов задержки, генератор одиночного импульса, генератор тактовых импульсов, счетчик импульсов, элемент ИЛИ, второй блок элементов И, блок памяти, при этом выход генератора одиночного импульса соединен с входом запуска генератора тактовых импульсов и с первым входом элемента ИЛИ, выход генератора тактовых импульсов соединен с входами считывания первого и второго регистров памяти и счетным входом счетчика импульсов, вход обнуления которого подключен к выходу элемента ИЛИ, выход счетчика импульсов соединен с вторым входом элемента ИЛИ, входом считывания усреднителя, вторым входом первого блока элементов И и первым входом второго блока элементов И, второй вход которого подсоединен к выходу первого регистра памяти, выход усреднителя соединен с первым входом вычитателя, выход второго матричного умножителя подсоединен к второму входу сумматора и к входу первого матричного умножителя, второй вход вычитателя и первый вход блока памяти являются соответственно первым и вторым входами модифицированного фильтра Калмана, выход первого регистра памяти и выход второго блока элементов И являются соответственно первым и вторым выходами модифицированного фильтра Калмана, введен блок вычисления оптимальных весовых коэффициентов, первый, второй и третий входы которого подключены соответственно к выходу блока памяти, к выходу генератора тактовых импульсов и к выходу счетчика импульсов, при этом счетный вход блока памяти подключен к выходу генератора одиночного импульса, второй вход перемножителя подключен к выходу блока вычисления оптимальных весовых коэффициентов, четвертый вход которого является входом сигнала, пропорционального значению ковариации измерительной системы R (tj).
Блок вычисления оптимальных весовых коэффициентов содержит последовательно соединенныe первый регистр памяти, первый усреднитель, функциональный делитель и второй регистр памяти, второй вход которого соединен с вторым входом первого усреднителя и с первым входом первого регистра памяти, последовательно соединенные первый блок элементов задержки, первый матричный умножитель, второй матричный умножитель, первый сумматор, второй сумматор, третий регистр памяти, второй усреднитель и третий сумматор, выход которого соединен с входом функционального делителя, последовательно соединенные третий матричный умножитель, четвертый сумматор и второй блок элементов задержки, выход которого соединен с другим входом четвертого сумматора, последовательно соединенные четвертый матричный умножитель, пятый сумматор, четвертый регистр памяти, третий усреднитель, матричный перемножитель, пятый регистр памяти, вычитатель, элемент ИЛИ, шестой регистр памяти, пятый матричный умножитель и шестой сумматор, другой вход которого подключен к выходу первого матричного умножителя, последовательно соединенные шестой матричный умножитель, седьмой сумматор и третий блок элементов задержки, выход которого соединен с другим входом седьмого сумматора, последовательно соединенные четвертый блок элементов задержки, седьмой матричный умножитель и восьмой матричный умножитель, выход которого соединен с другим входом вычитателя, последовательно соединенные пятый блок элементов задержки и девятый матричный умножитель, выход которого соединен с другим входом пятого сумматора и с входом шестого матричного умножителя, шестой блок элементов задержки, вход которого подключен к выходу первого сумматора, другой вход которого подключен к выходу шестого блока элементов задержки, при этом выход второго регистра памяти соединен с другим входом матричного перемножителя, выход шестого сумматора соединен с вторым входом первого регистра памяти и входом первого блока элементов задержки, входы четвертого матричного умножителя и четвертого блока элементов задержки подключены к выходу шестого регистра памяти, вход пятого блока элементов задержки подключен к выходу пятого сумматора, вход третьего матричного умножителя подключен к выходу четвертого матричного умножителя, второй и третий входы второго сумматора подключены соответственно к выходу четвертого сумматора и к выходу седьмого сумматора, другой вход элемента ИЛИ и другой вход шестого регистра памяти являются соответственно первым и вторым входами блока вычисления оптимальных весовых коэффициентов, другой вход второго усреднителя, другой вход третьего регистра памяти, другие входы четвертого регистра памяти, третьего усреднителя, пятого регистра памяти, второго регистра памяти объединены и являются третьим входом блока вычисления оптимальных весовых коэффициентов, другой вход третьего сумматора является четвертым входом блока вычисления оптимальных весовых коэффициентов, а выход второго регистра памяти является выходом блока вычисления оптимальных весовых коэффициентов.
На фиг. 1 представлена функциональная схема модифицированного фильтра Калмана.
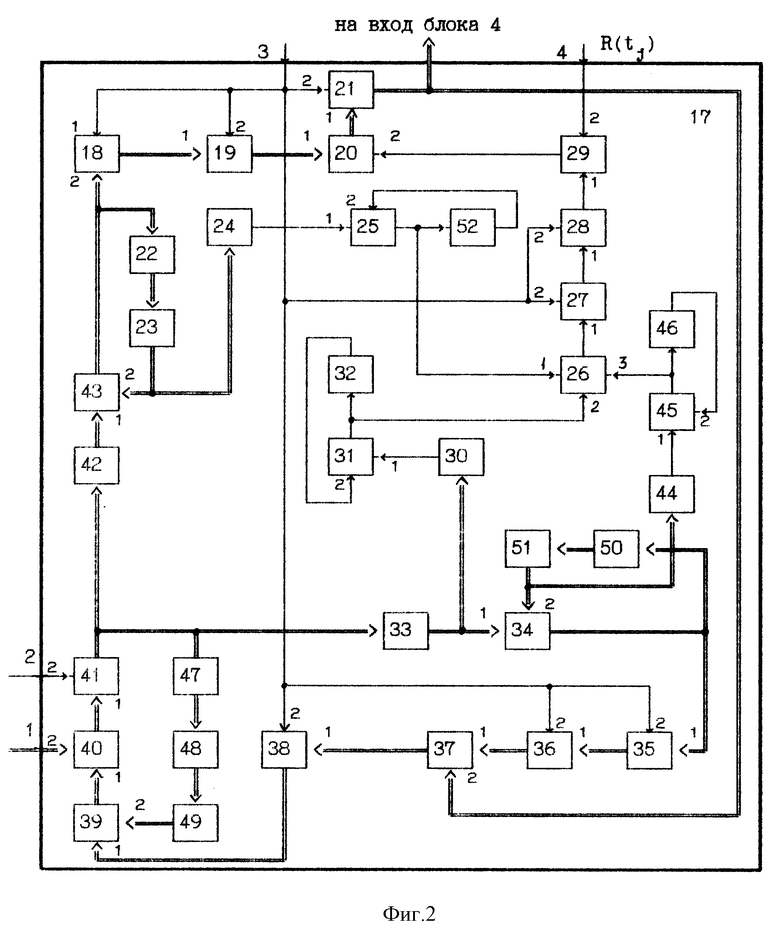
На фиг. 2 представлена функциональная схема блока вычисления оптимальных весовых коэффициентов.
Модифицированный фильтр Калмана содержит генератор 1 одиночного импульса, генератор 2 тактовых импульсов, вычитатель 3, перемножитель 4, сумматор 5, первый регистр 6 памяти, блок 7 элементов задержки, первый и второй матричные умножители 8, 9, первый блок 10 элементов И, счетчик 11 импульсов, элемент 12 ИЛИ, усреднитель 13, второй блок 14 элементов И, блок 15 памяти, второй регистр 16 памяти, блок 17 вычисления оптимальных весовых коэффициентов.
Блок вычисления оптимальных весовых коэффициентов содержит первый регистр 18 памяти, первый усреднитель 19, функциональный делитель 20, второй регистр 21 памяти, первый блок 22 элементов задержки, первый и второй матричные умножители 23, 24, первый и второй сумматоры 25, 26, третий регистр памяти 27, второй усреднитель 28, третий сумматор 29, третий матричный умножитель 30, четвертый сумматор 31, второй блок 32 элементов задержки, четвертый матричный умножитель 33, пятый сумматор 34, четвертый регистр 35 памяти, третий усреднитель 36, матричный перемножитель 37, пятый регистр 38 памяти, вычитатель 39, элемент 40 ИЛИ, шестой регистр 41 памяти, пятый матричный умножитель 42, шестой сумматор 43, шестой матричный умножитель 44, седьмой сумматор 45, третий 46 и четвертый 47 блоки элементов задержки, седьмой 48 и восьмой 49 матричные умножители, пятый блок 50 элементов задержки, девятый матричный умножитель 51, шестой блок элементов задержки 52.
Вычитатель 3, перемножитель 4, сумматор 5, первый регистр 6 памяти и блок 7 элементов задержки соединены последовательно. Первый матричный умножитель 8, второй регистр 16 памяти, первый блок 10 элементов И и усреднитель 13 также соединены последовательно. Вход второго матричного умножителя 9 подключен к выходу блока 7 элементов задержки. Выход генератора 1 одиночного импульса соединен с входом запуска генератора 2 тактовых импульсов, с первым входом элемента 12 ИЛИ и со счетным входом блока 15 памяти. Выход генератора 2 тактовых импульсов соединен с входами считывания первого 6 и второго 16 регистров памяти и счетным входом счетчика 11 импульсов, вход обнуления которого подключен к выходу элемента 12 ИЛИ. Выход счетчика 11 импульсов соединен с вторым входом элемента 12 ИЛИ, входом считывания усреднителя 13, вторым входом первого блока 10 элементов И и с первым входом второго блока 14 элементов И, второй вход которого подсоединен к выходу первого регистра 6 памяти. Выход усреднителя 13 соединен с первым входом вычитателя 3. Выход второго матричного умножителя 9 подсоединен к второму входу сумматора 5 и к входу первого матричного умножителя 8. Второй вход вычитателя 3 и первый вход блока 15 памяти являются соответственно первым и вторым входами модифицированного фильтра Калмана. Выход первого регистра 6 памяти и выход второго блока 14 элементов И являются соответственно первым и вторым выходами модифицированного фильтра Калмана. Первый, второй и третий входы блока 17 вычисления оптимальных весовых коэффициентов подключены соответственно к выходу блока 15 памяти, к выходу генератора 2 тактовых импульсов и к выходу счетчика 11 импульсов. Второй вход перемножителя 4 подключен к выходу блока 17 вычисления оптимальных весовых коэффициентов, четвертый вход которого является входом сигнала, пропорционального значению ковариации измерительной системы R(tj).
Первый регистр 18 памяти, первый усреднитель 19, функциональный делитель 20 и второй регистр 21 памяти, второй вход которого соединен с вторым входом первого усреднителя 19 и с первым входом первого регистра 18 памяти, соединены последовательно. Первый блок 22 элементов задержки, первый и второй матричные умножители 23, 24, первый и второй сумматоры 25, 26, третий регистр 27 памяти, второй усреднитель 28 и третий сумматор 29, выход которого соединен с входом функционального делителя 20, соединены последовательно. Третий матричный умножитель 30, четвертый сумматор 31 и второй блок 32 элементов задержки, выход которого соединен с другим входом четвертого сумматора 31, соединены последовательно. Четвертый матричный умножитель 33, пятый сумматор 34, четвертый регистр 35 памяти, третий усреднитель 36, матричный перемножитель 37, пятый регистр 38 памяти, вычитатель 39, элемент 40 ИЛИ, шестой регистр 41 памяти, пятый матричный умножитель 42 и шестой сумматор 43, другой вход которого подключен к выходу первого матричного умножителя 23, соединены последовательно. Шестой матричный умножитель 44, седьмой сумматор 45 и третий блок 46 элементов задержки, выход которого соединен с другим входом седьмого сумматора 45, соединены последовательно. Четвертый блок 47 элементов задержки, седьмой матричный умножитель 48 и восьмой матричный умножитель 49, выход которого соединен с другим входом вычитателя 39, соединены последовательно. Пятый блок 50 элементов задержки и девятый матричный умножитель 51, выход которого соединен с другим входом пятого сумматора 34 и с входом шестого матричного умножителя 44, соединены последовательно. Вход шестого блока 52 элементов задержки подключен к выходу первого сумматора 25, другой вход которого подключен к выходу шестого блока 52 элементов задержки. Выход второго регистра 21 памяти соединен с другим входом матричного перемножителя 37. Выход шестого сумматора 43 соединен с вторым входом первого регистра 18 памяти и входом первого блока 22 элементов задержки. Входы четвертого матричного умножителя 33 и четвертого блока 47 элементов задержки подключены к выходу шестого регистра 41 памяти. Вход пятого блока 50 элементов задержки подключен к выходу пятого сумматора 34. Вход третьего матричного умножителя 30 подключен к выходу четвертого матричного умножителя 33. Второй и третий входы второго сумматора 26 подключены соответственно к выходу четвертого сумматора 32 и к выходу седьмого сумматора 45. Другой вход элемента 40 ИЛИ, другой вход шестого регистра 41 памяти являются соответственно первым и вторым входами блока 17 вычисления оптимальных весовых коэффициентов. Другой вход второго усреднителя 28, другой вход третьего регистра 27 памяти, другие входы четвертого регистра 35 памяти, третьего усреднителя 36, пятого регистра 38 памяти, второго регистра 21 памяти объединены и являются третьим входом блока 17 вычисления оптимальных весовых коэффициентов. Другой вход третьего сумматора 29 является четвертым входом блока 17 вычисления оптимальных весовых коэффициентов, выход второго регистра 21 памяти является выходом блока 17 вычисления оптимальных весовых коэффициентов.
Модифицированный фильтр Калмана работает следующим образом
На выходе генератора 1 одиночного импульса формируется импульс, являющийся запускающим для устройства. Этот импульс через первый вход, выход элемента 12 ИЛИ поступает на первый вход (вход обнуления) счетчика 11 импульсов, на вход генератора 2 тактовых импульсов, который начинает вырабатывать тактовые импульсы с периодом tk, соответствующим темпу накопления усредняемых измерений, на второй вход (вход считывания) блока 15 памяти. С выхода блока 15 на первый вход блока 17 вычисления оптимальных весовых коэффициентов происходит считывание сигналов, пропорциональных начальным значениям элементов матрицы ковариации P0=P(t0,t0) ошибок оценивания вектора X параметров состояния измерительной системы. Значения P0 записываются в блок 15 перед началом работы фильтра. На первый вход вычитателя 3 поступает входной сигнал z(tj) фильтра
где m - число усредняемых значений входного сигнала;
Z(tk) - последовательность измерений, усредняемых на передающей стороне, причем tj=mtk.
На выходе вычитателя 3 формируется сигнал невязки наблюдения
где  усредненная оценка текущего наблюдения, поступающая на второй вход вычитателя 3 с выхода усреднителя 13 при обнулении счетчика 11;
усредненная оценка текущего наблюдения, поступающая на второй вход вычитателя 3 с выхода усреднителя 13 при обнулении счетчика 11;
X(tk, tk-1) - экстраполированное на момент времени tk значениe вектора параметров состояния измерительной системы;
H(tk) - матрица коэффициентов связи измерения с вектором X параметров состояния.
Сигнал Δz(tj) невязки поступает с выхода вычитателя 3 на первый вход перемножителя 4. На второй вход перемножителя 4 поступают формируемые в блоке 17 сигналы, пропорциональные оптимальным весовым коэффициентам K(tj) фильтра на момент времени tj. Причем коэффициенты K(tj) корректируются в темпе накопления усредняемых измерений z(tj) с частотой поступления тактовых импульсов на второй вход блока 17 и выдаются в сформированном виде на выход блока 17 при появлении на его третьем входе разрешающего импульса при обнулении счетчика 11.
С выхода перемножителя 4 сигнал K(tj)Δz(tj) поступает на первый вход сумматора 5, на второй вход которого с выхода матричного умножителя 9 на каждом такте поступает сигнал, пропорциональный экстраполированному значению вектора параметров состояния измерительной системы.
X(tk, tk-1)=ФкX(tk-1, tk-2),
где X(tk-1, tk-2) - экстраполированное значение вектора параметров состояния на момент времени (tk-1);
Фк - переходная матрица для вектора параметров состояния. Причем на момент времени tj экстраполированный сигнал пропорционален величине
где X(tj-m,tj-m) = X(tj-m,tj-2m)+K(tj-m)Δz(tj-m).
В j-й момент времени в сумматоре 5 формируется сигнал X(tj, tj), равный
X(tj,tj) = X(tj,tj-m)+K(tj)Δz(tj),
который поступает на вход первого регистра 6 память, считывание информации с которого происходит при появлении на его входе считывания тактового импульса.
С выхода первого регистра 6 сигнал X(tj, tj) поступает на первый выход устройства, второй вход второго блока 14 элементов И, на выходе которого при обнулении счетчика 11 формируется оценка X(tj, tj) на момент времени (tj), и на вход блока 7 элементов задержки. Сигнал с выхода блока 7 используется для получения во втором матричном умножителе экстраполированного сигнала
X(tk+1, tk)=Фк+1X(tk, tk-1)
В первом матричном умножителе 8 формируется сигнал
Δz(tk+1), = H(tk+1)X(tk+1,tk),
записываемый затем во второй регистр 16 памяти.
Считывание информации из регистра 16 на первый вход первого блока 10 элементов И происходит при появлении на входе считывания регистра 16 тактового импульса. Блок 10 пропускает информацию на вход усреднителя 13 после подсчета счетчиком 11 m импульсов, когда с его выхода поступает импульс на второй вход блока 10, а сам счетчик 11 обнуляется через элемент 12 ИЛИ.
Блок 17 вычисления оптимальных весовых коэффициентов работает следующим образом.
Сигналы, пропорциональные значениям ковариаций P(t0, t0) ошибок оценивания вектора параметров X состояния измерительной системы, с первого входа блока 17 через второй вход, выход элемента 40 ИЛИ поступают на первый вход шестого регистра 41 памяти. Считывание информации из регистра 41 на входы четвертого 33, пятого 42 матричных умножителей и четвертого блока 47 элементов задержки происходит при появлении на входе считывания регистра 41 тактового импульса. Блок 47 осуществляет задержку на один такт. Сигнал с выхода блока 47 используется для получения в седьмом матричном умножителе 48 сигнала ФкP(tk-1, tk-2), где P(tk-1, tk-2) - экстраполированное значение ковариаций ошибок оценивания на момент времени tk-1. Сигнал с выхода матричного умножителя 48 поступает на вход восьмого матричного умножителя 49, в котором формируется сигнал экстраполированного значения ковариаций ошибок оценивания на момент времени tk
P(tk, tk-1) = ФкP(tk-1, tk-2)Фк Т,
где (T) - символ транспонирования.
Причем на момент времени tj экстраполированный сигнал ковариации пропорционален величине
где P(tj-m,tj-m) = P(tj-m, tj-2m) - K(tj-m) Ã (tj-m).
Экстраполированные сигналы ковариации P(tk, tk-1) поступают на второй вход вычитателя 39, на первый вход которого в момент времени tj из пятого регистра 38 памяти происходит считывание корректирующего сигнала K(tj(Ã)tj). Причем считывание информации из регистра 38 происходит при появлении на его счетном входе разрешающего импульса с третьего входа блока 17. Таким образом, на выходе вычитателя 39 в моменты времени  формируются экстраполированные значения ковариаций, а в момент времени tj - скорректированное значение ковариации, равное
формируются экстраполированные значения ковариаций, а в момент времени tj - скорректированное значение ковариации, равное
P(tj,tj) = P(tj,tj-m)-K(tj)Ã(tj).
которое через первый вход, выход элемента 40 ИЛИ поступает на первый вход шестого регистра 41 памяти.
В пятом матричном умножителе 42 в каждый момент времени tk формируется сигнал поправки P(tk, tk-1)HT(tk), который поступает на первый вход шестого сумматора 43, на второй вход которого, а также на вход второго матричного умножителя 24 поступает сигнал ФкВ(tk-1), формируемый в первом матричном умножителе 23. Сигнал с выхода шестого сумматора 43, равный
B(tk)=ФкВ(tk-1)+P(tk, tk+1) HT(tk)
через вход, выход первого блока 22 элементов задержки поступает на вход первого матричного умножителя 23 и на второй вход первого регистра 18 памяти. Блок 22 осуществляет задержку на один такт. Считывание информации из регистра 18 на первый вход первого усреднителя 19 происходит при появления на входе считывания регистра 18 в момент времени tj разрешающего импульса с третьего входа блока 17. При появлении данного импульса на счетном входе усреднителя 19 на его выходе формируется сигнал
который поступает на первый вход функционального делителя 20. Во втором матричном умножителе 24 формируется сигнал поправки H(tk)ФКВ(tk-1), который поступает на первый вход первого сумматора 25, на второй вход которого с выхода шестого блока 52 элементов задержки поступает сигнал C(tk-1). Сигнал с выхода сумматора 25, равный
C(tk)=C(tk-1)+H(tk)ФкВ(tk-1),
поступает на первый вход второго сумматора 26 и на вход блока 52 элементов задержки. Блок 52 осуществляет задержку на один такт.
В четвертом матричном умножителе 33 формируется сигнал H(tk)P(tk, tk-1), который поступает на вход третьего матричного умножителя 30 и на первый вход пятого сумматора 34, на второй вход которого, а также на вход шестого матричного умножителя 44 поступает сигнал A(tk-1)Фк Т, формируемый в девятом матричном умножителе 51. Сигнал с выхода сумматора 34, равный
A(tk)=A(tk-1)Фк Т+H(tk)P(tk, tk-1)
поступает на первый вход четвертого регистра 35 памяти и через вход, выход пятого блока 50 элементов задержки на вход девятого матричного умножителя 51. Блок 50 осуществляет задержку на один такт. В шестом матричном умножителе 44 формируется сигнал A(tk-1)Фк THT(tk), который поступает на первый вход седьмого сумматора 45, на второй вход которого с выхода третьего блока 46 элементов задержки поступает сигнал D(tk-1). Сигнал с выхода сумматора 45, равный
D(tk)=D(tk-1)+A(tk-1)/ Фк THТ(tk),
поступает на третий вход второго сумматора 26 и на вход блока 46 элементов задержки. Блок 46 осуществляет задержку на один такт.
В третьем матричном умножителе 30 формируется сигнал поправки H(tk-1)P(tk, tk-1)HT(tk), который поступает на первый вход четвертого сумматора 31, на второй вход которого с выхода второго блока 32 элементов задержки поступает сигнал F(tk-1).
Сигнал с выхода сумматора 31, равный
F(tk)=F(tk-1)+H(tk)P(tk, tk-1) HT(tk)
поступает на вход блока 32, осуществляющего задержку на один такт, и на второй вход второго сумматора 26, на выходе которого формируется сигнал
L(tk=C(tk)+D(tk)+F(tk),
который поступает на первый вход третьего регистра 27 памяти. Считывание информации из регистра 27 на первый вход второго усреднителя 28 происходит при появлении на его счетном входе в момент времени tj разрешающего импульса с третьего входа блока 17. При появлении данного импульса на втором входе второго усреднителя 28 на его выходе формируется сигнал
который поступает на первый вход третьего сумматора 29, на выходе которого формируется сигнал
где R(tj) - сигнал ковариации ошибок измерительной системы, поступающий на второй вход сумматора 29 с четвертого входа блока 17 вычисления оптимальных весовых коэффициентов. С выхода сумматора 29 сигнал  поступает на вход функционального делителя 20, на выходе которого формируется сигнал, равный
поступает на вход функционального делителя 20, на выходе которого формируется сигнал, равный
Сигнал с выхода функционального делителя 20 поступает на первый вход второго регистра 21 памяти. Считывание информации из регистра 21 на выход блока 17 и на второй вход перемножителя 37 происходит при появлении на счетном входе регистра 21 в момент времени tj разрешающего импульса с третьего входа блока 17. Считывание информации из четвертого регистра 35 памяти на первый вход третьего усреднителя 36 происходит при появлении на счетном входе регистра 35 в момент времени tj разрешающего импульса на втором входе усреднителя 36, на его выходе формируется сигнал
который поступает на первый вход матричного перемножителя 37, на выходе которого формируется корректирующий сигнал, равный K(tj)Ã(tj), который поступает на первый вход пятого регистра 38 памяти. Таким образом, по сравнению с прототипом предлагаемое устройство обеспечивает повышение точности фильтрации предварительно усредненных измерений путем формирования и применения оптимальных по минимуму дисперсии весовых коэффициентов для получения текущих оценок.
| название | год | авторы | номер документа |
|---|---|---|---|
| Модифицированный фильтр Калмана | 1986 |
|
SU1434539A1 |
| ЦИФРОВОЙ РАДИОПЕЛЕНГАТОР | 1999 |
|
RU2149419C1 |
| Цифровой фильтр | 1990 |
|
SU1739483A1 |
| Устройство для выполнения быстрого преобразования Фурье | 1980 |
|
SU1062713A1 |
| ПРОЦЕССОР С МАКСИМАЛЬНО ВОЗМОЖНОЙ ПРОИЗВОДИТЕЛЬНОСТЬЮ ДЛЯ БЫСТРОГО ПРЕОБРАЗОВАНИЯ ФУРЬЕ | 2005 |
|
RU2290687C1 |
| Устройство для прогнозирования длительности производственных операций | 1990 |
|
SU1781685A1 |
| Адаптивный корректор многоканального сигнала с ортогональными составляющими | 1990 |
|
SU1807571A1 |
| Адаптивный фильтр Калмана | 1990 |
|
SU1800588A1 |
| Адаптивный цифровой фильтр | 1987 |
|
SU1543542A1 |
| Устройство для нахождения экстремумов | 1986 |
|
SU1322318A1 |
Использование: в вычислительной технике для фильтрации результатов измерений. Сущность изобретения: модифицированный фильтр Калмана содержит генератор одиночного импульса, генератор тактовых импульсов, два вычитателя, перемножитель, матричный перемножитель, одиннадцать матричных умножителей, восемь регистров памяти, семь блоков элементов задержки, два блока элементов И, два элемента ИЛИ, счетчик импульсов, блок памяти, четыре усреднителя, функциональный делитель, восемь сумматоров, блок вычисления оптимальных коэффициентов усиления. Технический результат: повышение точности фильтрации предварительно усредненных измерений путем использования блока вычисления оптимальных весовых коэффициентов. 1 з.п. ф-лы, 2 ил.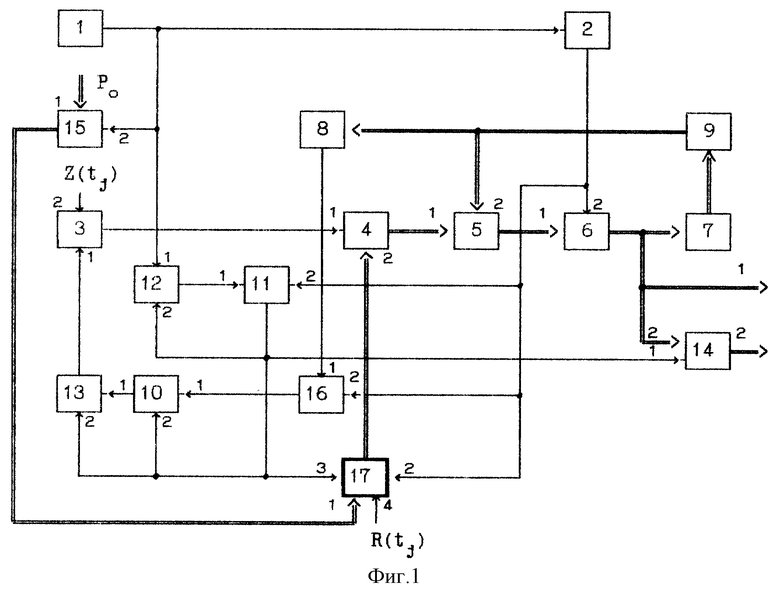
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Сейдж Э., Мелс Дж | |||
| Теория оценивания и ее применение в связи и управлении | |||
| - М.: Связь, 1976, с.270 | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Модифицированный фильтр Калмана | 1986 |
|
SU1434539A1 |
